無人飛行器氣動力測量系統設計與驗證
2019-02-14 06:02:19方毅徐錦法
中國科技縱橫 2019年23期
方毅 徐錦法
摘 要:本文設計了一套基于應變敏感的氣動力測量系統,能用于無人飛行器氣動力測試、旋翼拉力試驗等試驗工作。測量系統敏感部件設計為分體式六分量天平,以硬質鋼材為敏感材料、電阻應變片為敏感元件,采用全橋應變作為氣動力測量電路,使用嵌入式設備作為數據處理器,并使用用C#語言設計了一套數字信號采集處理與顯示程序,實現了氣動力模擬信號到數字信號轉換和模數轉換、信號采集、數據存儲、數據顯示的模塊化設計。測量系統經標定、實驗,驗證了功能,表明所設計測量系統滿足設計要求。上位機界面簡潔明了、容易操縱,可為無人飛行器的研制提供一個方便可靠的實驗平臺。
關鍵詞:無人飛行器;氣動力;應變片;測量系統
中圖分類號:V221 文獻標識碼:A 文章編號:1671-2064(2019)23-0081-03
0 引言
無人旋翼飛行器可廣泛應用于搜救、救援、巡檢等任務,既可以貼地飛行,也可以長時間近距離靠近物體飛行,可以完成固定翼飛機無法完成的任務。
無人旋翼飛行器研制需要研究其操縱響應特性,需要一套氣動力測量系統測試氣動力響應數據進而分析其操縱性。氣動力測量天平有單分量天平、多分量天平,按結構形式可分成盒式天平、桿式天平、分體式天平。單分量天平的測量力素單元是唯一的,所以不存在耦合問題,測量多個力素時需多個測量單元組合,結構安裝不方便。飛行器氣動力測量中通常是盒式多分量天平,利于分析和研究,但天平結構復雜、加工難度大,不同的軸向之間存在耦合,標定過程復雜。本文研制了一款分體式多分量天平和信號測量、采集與處理系統,通過電阻應變片組橋及結構模塊安裝上消除了各軸向力和力矩測量的耦合。
1 分體式六分量天平
分體式六分量天平使用傳統測量原理,采用單軸向測量模塊進行組合,在模塊設計上只敏感單軸向應力變化,其它軸向通過機械設計加工實現隔離解耦,天平設計具有上下兩底板,下底板用于固定,上底板用于安裝待測量飛行器,詳見下述。
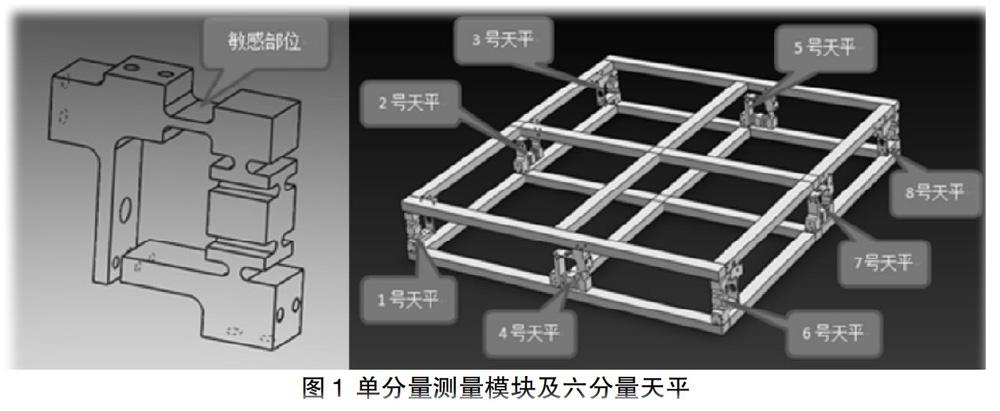
1.1 單分量測量單元模塊與六分量天平
六分量天平設計由八個單分量測量單元模塊組成,每個測量單元模塊為力素敏感單元。測量單元模塊的梁臂上下表面上粘貼有應變片,用于構成3個軸向力和3個軸向力矩測量橋路的橋臂,測量單元模塊和組合式測量天平結構如圖1。測量單元模塊的梁臂產生彎曲引起粘貼在測量梁臂上的應變片產生形變進而敏感出彎曲產生的應力電壓,進而測量出力值。通過八個單個測量單元模塊組合構成測量升力、壓力、側力、滾轉力矩、俯仰力矩、航向力矩的六分量天平。
為使六分量天平只敏感單一軸向的力或力矩,測量單元模塊設計為正交薄壁式結構(圖中凹槽處的薄壁),薄壁厚度較小,以盡可能減小耦合干擾。
1.2 天平受力分析
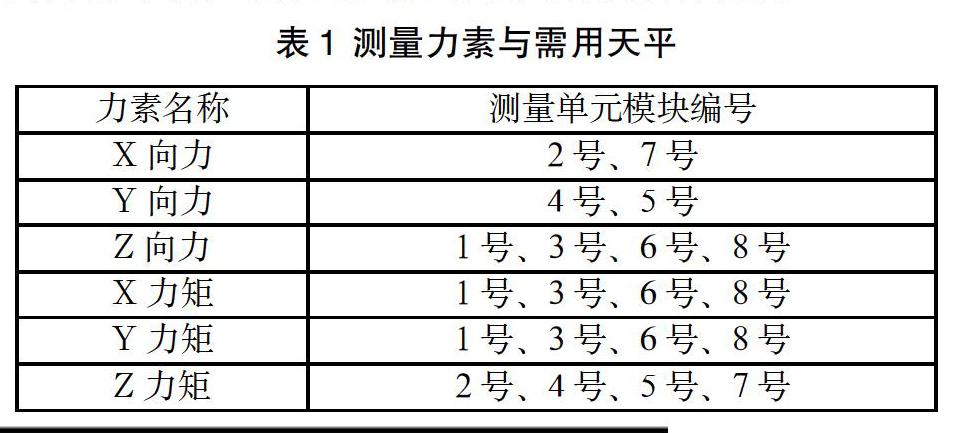
天平測量的六個分量為三個軸向力和繞三個軸的力矩,測量單元模塊只感受單自由度方向的應變,通過對八個測量單元模塊組合才能實現對飛行器的六力素的測量,測量單元模塊的安裝組合方式具體見表1所示,測量單元模塊編號參考圖1單元模塊編號,坐標原點位于天平中心,x軸指向5號測量單元模塊、y軸指向7號測量單元模塊、z軸指向下方(右手定則)。
由圖表可知,1號、3號、6號、8號構成Z向力、X向力矩和Y向力矩的測量單元模塊,2號、7號、4號、5號構成X向力、Y向力和繞Z軸向力矩的測量單元模塊。測量單元模塊具有有四個薄壁,單個模塊只承受垂向力作用,并可實現非垂向力的卸載,可解決多分量天平軸向耦合問題。
1.3 應變橋與測量精度
測量單元模塊材料為沉淀硬化不銹鋼,屬高強度材料,材料特性受力形變導致的應變小,電阻應變片可用來測量其微小應變。經調研,應變片選用中航電測的阻值為350Ω高精度電阻應變片,組全橋實現應變測量。
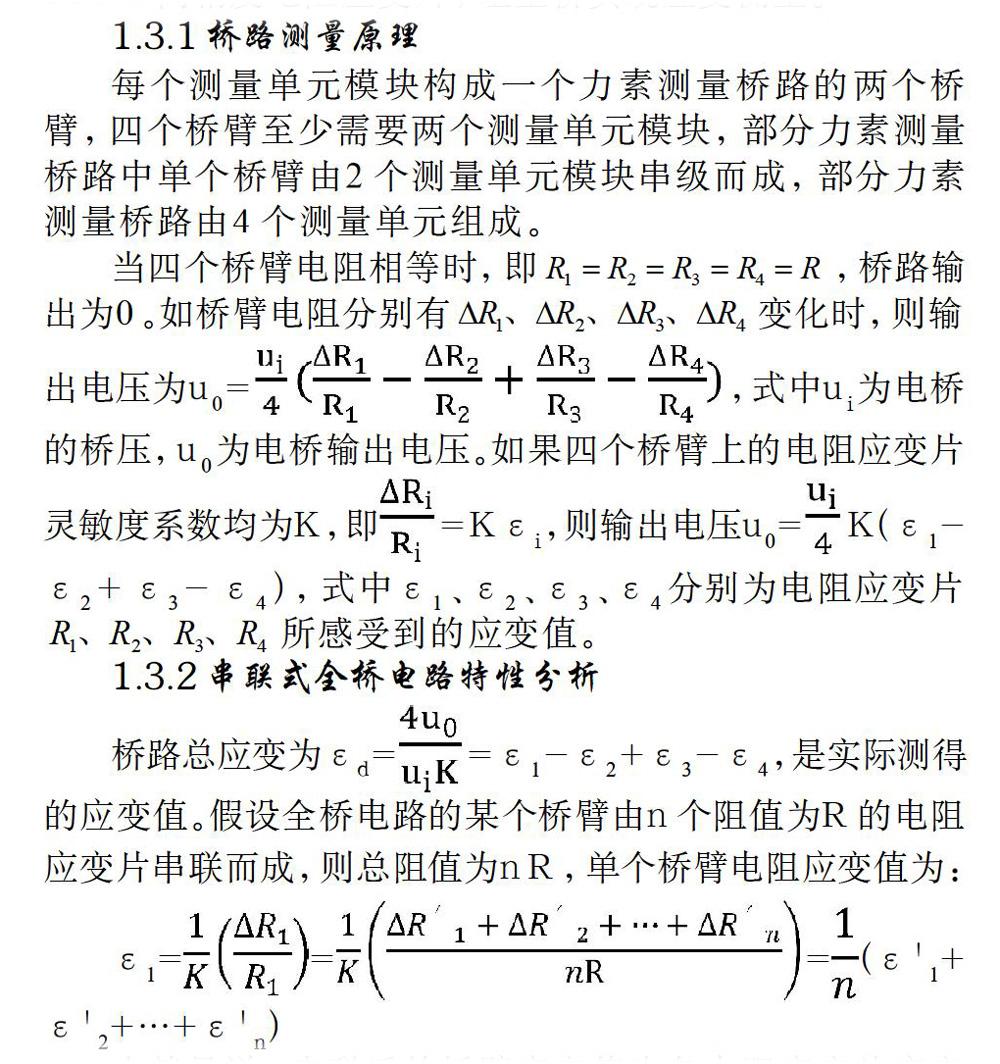
1.3.1 橋路測量原理
每個測量單元模塊構成一個力素測量橋路的兩個橋臂,四個橋臂至少需要兩個測量單元模塊,部分力素測量橋路中單個橋臂由2個測量單元模塊串級而成,部分力素測量橋路由4個測量單元組成。
當四個橋臂電阻相等時,即,橋路輸出為0。如橋臂電阻分別有變化時,則輸出電壓為u0=,式中ui為電橋的橋壓,u0為電橋輸出電壓。如果四個橋臂上的電阻應變片靈敏度系數均為K,即=Kεi,則輸出電壓u0=K(ε1-ε2+ε3-ε4),式中ε1、ε2、ε3、ε4分別為電阻應變片所感受到的應變值。
1.3.2 串聯式全橋電路特性分析
橋路總應變為εd==ε1-ε2+ε3-ε4,是實際測得的應變值。假設全橋電路的某個橋臂由n個阻值為R的電阻應變片串聯而成,則總阻值為nR,單個橋臂電阻應變值為:
ε1===(ε'1+ε'2+…+ε'n)
也就是說,串聯后的橋臂應變值為各電阻應變片應變值的平均。假定選用相同電阻應變片,則橋臂電阻串聯其橋臂應變值等于單個應變片的應變值,測量精度不會有明顯提高,只是橋臂電阻值增大,但可以提高供橋電壓。
1.3.3 力素測量橋路
測量單元模塊的應變片粘貼方式如圖2所示,敏感部位共粘貼6片應變片,粘貼位置對稱、準確。敏感部位上下兩表面上的相應位置標號分別用1、2、3和1‘、2、3‘表示,測量單元模塊用1、2……8表示,則Z向力測量橋路可用R11/R11”、R31/R31”、R61/R61”、R81/R81”來組橋,如圖2所示,AB端為供橋電源橋點,CD為信號橋點。
天平受到向上的拉力作用時測量單元模塊的敏感部位上表面應變片受到壓縮,下表面內部應變片受到拉伸,二者形變形式不同,但是應變量大小相同的,因此二者僅數值大小有正負,通過串聯接線方法組成的串聯全橋可以實現高精度的應變測量。當各應變片的應變相同,則有:
εd=(+++)-(---)=
2 信號調理與數據采集
2.1 信號調理與數據采集硬件
信號調理與數據采集硬件包括信號調理電路、模數轉換電路、數據采集電路,測量時還需要進行度量空間轉換標定。由六分量天平的各測量單元模塊感知氣動力響應信號(即微應變),應變橋將微應變轉換為電壓模擬信號,模數轉換電路把電壓模擬信號轉換數字信號,力素度量空間轉換標定將數字電壓信號轉換為力學數據。
數據采集處理器芯片選用STM32F103xx增強型微控制器,具有一個嵌入式ARM核,兼容所有ARM工具和軟件;嵌入式Flash存儲器和RAM存儲器,內置多達512KB的嵌入式Flash用于存儲程序和數據;可變靜態存儲器(FSMC)、嵌套矢量中斷控制器(NVIC)、外部中斷/事件控制器(EXTI)等,具有多種電源管理模式。
信號調理及數據采集處理電路如圖3所示,6個力素測量單元各自獨立。測量單元模塊通信接口設計為九芯航空插頭,且具有互換性,測量單元模塊和數據采集系統間使用9芯優質屏蔽線連接,可有效屏蔽外界電磁干擾。
2.2 通信機制
信號調理與數據采集系統將采集到的力素數據傳輸到上位機進行數據顯示和存儲,數據采集系統與上位機間設計采用CAN總線串行通信。因現有的計算機不具有CAN總線接口而無法直接進行數據交互,設計添加了CAN轉串口數據收發器以實現數據快速傳輸,如圖3所示。
CAN總線通信優點是不限制節點數量,且通信可靠,CAN總線上的節點沒有固定的地址,通過數據包ID而非節點地址來收發數據,只要總線上數據包的ID號在則該ID節點數據就被送到上位機軟件處理單元進行相應的數據處理。該方式適用于多點數據采集系統,且開發使用方便快捷。
2.3 上位機軟件設計
上位機軟件使用C#語言開發,具有數字力素電壓信號采集、信號調理與數據通信、顯示、存儲、回放等功能。圖4所示為上位機軟件用戶界面。
3 實驗與結果
3.1 天平標定
測量天平使用前需進行標定,上位機數據采集軟件兼具標定功能,各力素通道標定結果如圖5所示。標定完成后,加載13kg靜態力,靜態力測量結果顯示標定數據可靠,對標定數據和實測結果進行比較發現,測量誤差在10g左右,測量精度滿足無人飛行器機動飛行力學測試要求。多次標定后選取可信平均值作為標定數據,圖5表中數據為垂向升力標定數據實例。天平在靜態狀態時標定數據顯示其回復性較好。
3.2 實測驗證
由于實驗時飛行器非靜態工作,因此天平測量受擾動影響。為檢驗動態實驗中天平的回復性,設計了飛行器定速變距實驗來檢驗天平在動態使用過程中的回復性,實驗條件為在相同轉速條件下固定時間長度內以相同的旋翼總距變化量來測試旋翼升力大小,實驗數據實例如圖6所示。經多次實驗數據對比表明:動態條件下天平可回復性較好,且實測升力數據與理論計算值接近,誤差在允許范圍內,靜態實驗及動態實驗都證明天平的設計及制作可靠。
4 結語
本文設計了一種新型的分體式六分量天平,重點研究了天平的構型設計以及測量方法,包括天平測量的組橋方式、測量精度分析、數據采集的實現、數據采集硬件與上位機程序的通信交互。設計制作了一套天平系統并將其應用在實際實驗中,測量數據與理論計算值相近并且在誤差允許范圍內,結果表明該天平的設計可行,整套系統在實際實驗中經過驗證是可行有效的。
參考文獻
[1] 匡莉娟,施洪昌.基于虛擬儀器的風洞測控系統設計[J].工業控制計算機,2009,22(4):15-16.
[2] 張景柱.特種六分力傳感器設計原理研究[D].南京:南京理工大學,2008.
[3] 韓步璋,程樸人,楊愛蘇,等.提高風洞天平阻力測量精確度的研究[J].氣動實驗與測量控制,1995,9(2):61-65.
[4] KailWatson,Christian Nagel,齊立波.C#入門經典[M].北京:清華大學出版社,2008.
[5] 計欣華,鄧宗白,魯陽,等.工程實驗力學[M].機械工業出版社,2010.
