基于GF-2遙感影像的一種快速水體信息提取方法
2019-03-02 02:06:02楊學(xué)志董張玉
圖學(xué)學(xué)報(bào) 2019年1期
鄒 橙,楊學(xué)志,董張玉,王 冬
?
基于GF-2遙感影像的一種快速水體信息提取方法
鄒 橙1,2,楊學(xué)志1,2,董張玉1,2,王 冬1,2
(1. 合肥工業(yè)大學(xué)計(jì)算機(jī)與信息學(xué)院,安徽 合肥 230009;2. 工業(yè)安全與應(yīng)急技術(shù)安徽省重點(diǎn)實(shí)驗(yàn)室,安徽 合肥 230009)
在高分辨率遙感影像中,水體與陰影(尤其是高大建筑物陰影)、暗色地物不易區(qū)分。針對(duì)GF-2遙感影像的光譜特性的大量實(shí)驗(yàn)研究,提出了一種新綜合水體指數(shù)法(NCWI)來(lái)增強(qiáng)水體區(qū)域信息;同時(shí)利用改進(jìn)的OSTU結(jié)合雞群算法(CSO)快速自適應(yīng)地確定最佳分割閾值,進(jìn)而得到最終的水體區(qū)域。將其同歸一化NDWI、改進(jìn)譜間關(guān)系法、主成分分析綜合法等常見(jiàn)水體信息提取方法應(yīng)用于GF-2遙感影像水體信息提取,利用采用實(shí)地采樣和人工解譯的混淆矩陣對(duì)提取的水體區(qū)域結(jié)果進(jìn)行精度驗(yàn)證和對(duì)比分析,從而驗(yàn)證了其有效性和高效性。4個(gè)實(shí)驗(yàn)區(qū)域的結(jié)果證明,該算法可以快速有效地提取水體信息,精確度分別達(dá)到97.82%,97.44%,92.13%,96.94%。
GF-2影像;水體提取;新綜合水體指數(shù);OSTU;高大建筑物陰影;雞群算法
利用遙感技術(shù)對(duì)水資源進(jìn)行實(shí)時(shí)高效地監(jiān)測(cè)、分析以及管理,對(duì)于人類(lèi)的生存和發(fā)展具有十分重要的意義。隨著遙感技術(shù)的快速發(fā)展,衛(wèi)星影像的分辨率也越來(lái)越高,對(duì)尺寸很小的對(duì)象都能夠分辨出特征細(xì)節(jié),使得不同的地物在影像中更加容易區(qū)分。然而,隨著影像分辨率的提高,影像中地物信息量也隨之增加,傳統(tǒng)面向?qū)ο蠓椒╗1-2]雖然能夠保證較高的精確度,但是耗時(shí)長(zhǎng),且具有較強(qiáng)的主觀特性,很難達(dá)到人們的實(shí)際需求。因此如何快速、準(zhǔn)確地從高分辨率遙感影像上提取出水體信息一直以來(lái)都是人們研究的一個(gè)熱點(diǎn)。
目前,國(guó)內(nèi)外在水體信息自動(dòng)提取方面已經(jīng)研究出了多種方法,如單波段閾值法、多波段譜間關(guān)系法[3]、水體指數(shù)法[3-6]、決策樹(shù)法、密度分割法、指數(shù)法、圖像變換[7-8]等,其中對(duì)水體指數(shù)法、多波段譜間關(guān)系法與決策樹(shù)法的研究較多,應(yīng)用也較為成熟。但主要運(yùn)用到TM/ETM+這類(lèi)波段較多且分辨率較低的遙感影像上。適合于分辨率高、波段少、信息量復(fù)雜的GF-2遙感影像水體信息提取方法尚不多見(jiàn),其算法也有待進(jìn)一步擴(kuò)展,是目前中國(guó)高分辨衛(wèi)星應(yīng)用研究的重要課題。根據(jù)實(shí)際需求,本文在分析GF-2影像常見(jiàn)地物光譜信息的基礎(chǔ)上,提出了一種適合于GF-2影像水體信息提取的新水體指數(shù)法(new comprehensive water index,NCWI),考慮到利用傳統(tǒng)最大類(lèi)間方差法(OSTU)在自動(dòng)計(jì)算水體指數(shù)法信息增強(qiáng)后的遙感圖像二值化最佳閾值耗時(shí)較長(zhǎng)等問(wèn)題[9],在采用改進(jìn)OSTU算法的基礎(chǔ)上結(jié)合一種模擬雞群等級(jí)制度和雞群行為的新型全局優(yōu)化算法——雞群算法(chicken swarm optimization,CSO)[10-11]提高了閾值選取的效率,并對(duì)GF-2影像數(shù)據(jù)進(jìn)行實(shí)驗(yàn),驗(yàn)證了本文算法的有效性和精確性。
1 數(shù)據(jù)源介紹與分析
1.1 數(shù)據(jù)介紹與處理
目前,GF-2號(hào)遙感衛(wèi)星是我國(guó)分辨率最高的光學(xué)遙感衛(wèi)星,其影像分辨率可達(dá)亞米級(jí)。原始的GF-2遙感衛(wèi)星影像包括4 m分辨率的多光譜數(shù)據(jù)以及1 m分辨率的全色數(shù)據(jù)。其中多光譜數(shù)據(jù)包括4個(gè)波段:藍(lán)(B1,0.45~0.52 μm)、綠(B2,0.52~0.59 μm)、紅(B3,0.63~0.69 μm)、近紅外(B4,0.77~0.89 μm);全色波段(Pan,0.45~0.89 μm)分辨率為1 m,只有一個(gè)波段。
本文選用了4景不同時(shí)間、不同區(qū)域云量少于2%的GF-2影像作為數(shù)據(jù)源,見(jiàn)表1。為了達(dá)到數(shù)據(jù)光譜與空間分辨信息最大化利用,采用PRC函數(shù)對(duì)原始影像進(jìn)行了正射校正、幾何校正、輻射定標(biāo)和Flash大氣校正等,較好地保持了圖像的紋理和光譜信息;且利用Gram-Schmidt Pan Sharpening (GS)對(duì)校正后的全色和多光譜數(shù)據(jù)進(jìn)行圖像融合,獲取分辨率為1 m的彩色融合影像作為實(shí)驗(yàn)備用數(shù)據(jù)。

表1 實(shí)驗(yàn)數(shù)據(jù)參照表
1.2 光譜特征分析
對(duì)彩色融合圖像中的水體、陰影、建筑物、裸地、道路、植被等典型地物的光譜值進(jìn)行統(tǒng)計(jì),并對(duì)4個(gè)實(shí)驗(yàn)區(qū)域的光譜值求平均值以保證數(shù)據(jù)的準(zhǔn)確性,結(jié)果見(jiàn)表2。其中水體可以分為2類(lèi):顏色較亮的清澈水體和易與陰影、暗色地物混合的顏色較暗的渾濁水體。以統(tǒng)計(jì)的4個(gè)波段的光譜均值為縱坐標(biāo),以每個(gè)波段中心(0.49,0.56,0.66,0.83)作為橫坐標(biāo)繪制光譜曲線,如圖1所示。
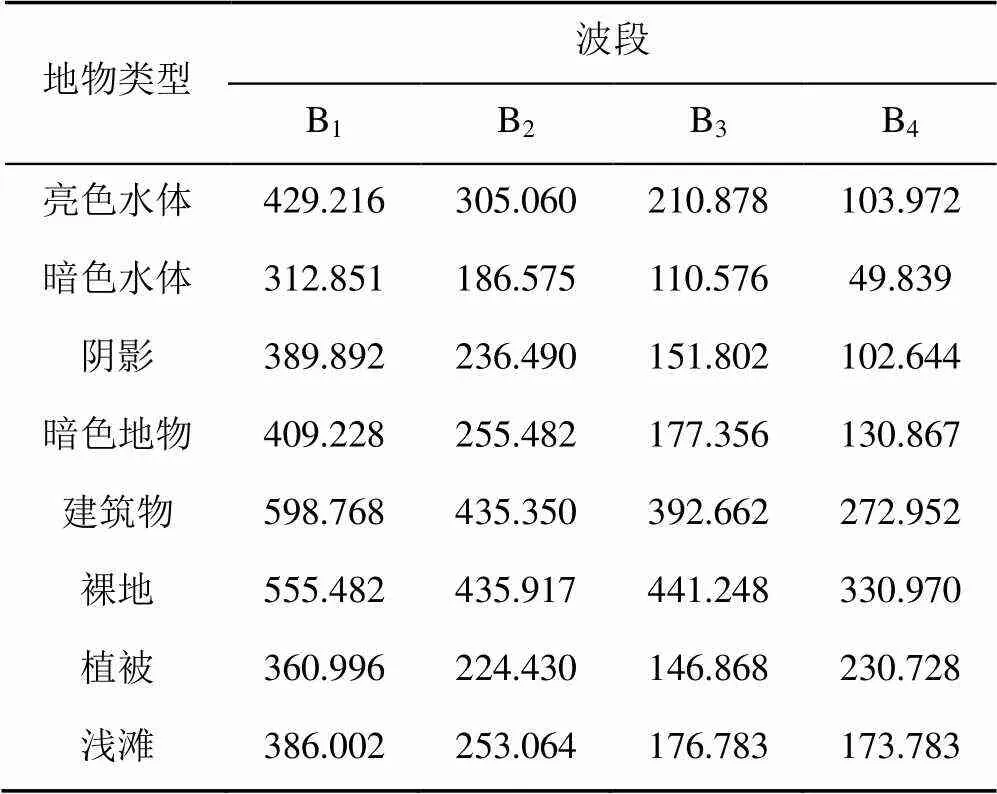
表2 研究區(qū)域水體及其相關(guān)地物類(lèi)型光譜均值
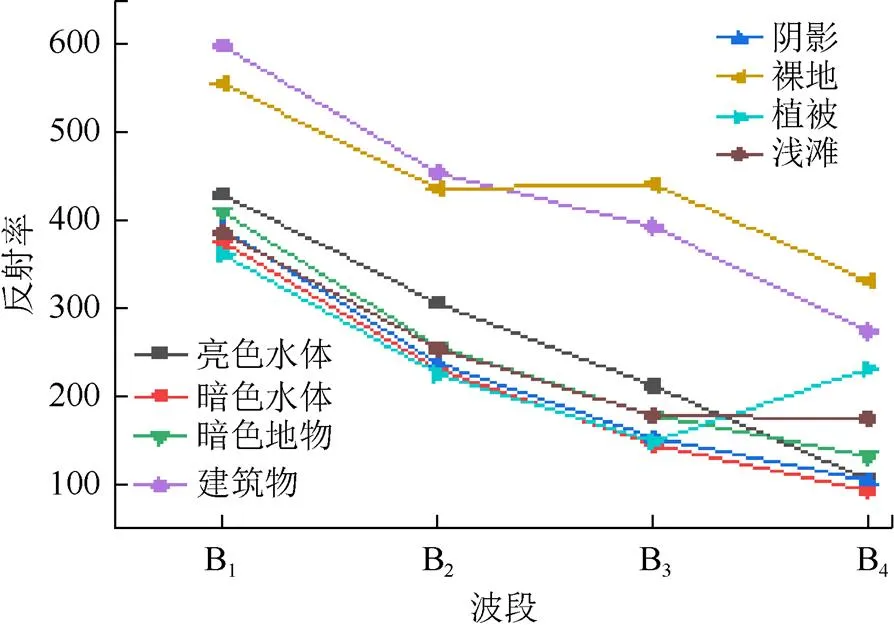
圖1 水體及相關(guān)地物典型光譜曲線
分析表2和圖1可知:①植被、淺灘與水體的反射率在藍(lán)、綠、紅波段區(qū)間比較接近,但是在近紅外波段區(qū)間卻呈現(xiàn)相反的增長(zhǎng)趨勢(shì)。②水體反射率在可見(jiàn)光范圍內(nèi)總體較低,且隨著波長(zhǎng)的增大而逐步走低,在近紅外波段達(dá)到最低,幾乎完全吸收,因此水體在遙感影像上呈現(xiàn)暗色調(diào),易與其他地物區(qū)分。但是影像中陰影和水體的灰度值較為接近,在近紅外波段上相交叉,使得陰影與水體不易區(qū)分。③除了植被之外,其余地物隨著光強(qiáng)依次減小,光散射的能力不同,下降的速率有較大的差異。無(wú)論是暗色水體還是亮色水體,從紅、綠波段到近紅外波段,光散射的速率越來(lái)越小,即水體和其他地物之間的亮度差異越來(lái)越明顯,包括與水體不易區(qū)分的陰影。
2 水體提取建模
本文研究的水體自動(dòng)提取模型,具體步驟如圖2所示,第一步利用水體指數(shù)進(jìn)行水體信息增強(qiáng);第二步利用改進(jìn)OSTU算法結(jié)合CSO算法進(jìn)行快速自動(dòng)閾值提取水體信息。
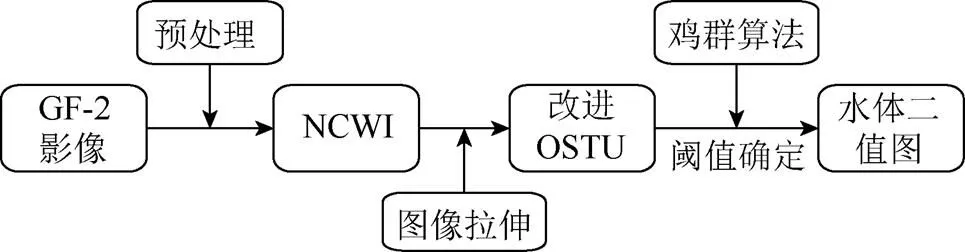
圖2 遙感影像水體信息提取流程圖
2.1 新型水體指數(shù)法
不同的地物在不同波段反射能力不同,對(duì)幾個(gè)波段進(jìn)行組合、差值、比值等運(yùn)算可以突出水體,且盡可能多地抑制非水體信息的表達(dá)。暗色地物以及陰影,尤其是高大建筑物陰影是影像水體信息提取的最大干擾因素,如何有針對(duì)性地剔除GF-2影像中的陰影非常重要。本文通過(guò)觀察表2和圖1可以發(fā)現(xiàn),水體在藍(lán)、綠波段下降速率明顯小于紅外波段,因此引入藍(lán)波段、綠波段和近紅外波段構(gòu)建NCWI,即

其中,1,2,4分別為GF-2影像的藍(lán)色波段、綠色波段以及近紅外波段。
2.2 OSTU算法
通過(guò)對(duì)NCWI水體指數(shù)增強(qiáng)后的遙感影像利用式(2)在The Environment for Visualizing Images(ENVI)中進(jìn)行圖像拉伸

其中,min和max分別為拉伸前的最小值和最大值。將拉伸后的4幅遙感影像放入MATLAB中進(jìn)行統(tǒng)計(jì),得到4個(gè)區(qū)域的灰度直方圖,如圖3所示。
圖3 4個(gè)實(shí)驗(yàn)區(qū)域NCWI處理后的灰度直方圖
可知通過(guò)NCWI水體指數(shù)增強(qiáng)后的圖像尤其是區(qū)域內(nèi)水體比例較多時(shí)呈現(xiàn)出較強(qiáng)的雙峰特性。而OSTU利用圖像灰度特性將圖像分為背景和目標(biāo),通過(guò)統(tǒng)計(jì)學(xué)方法自動(dòng)選取一個(gè)閾值將前景和背景區(qū)分開(kāi)來(lái)。尤其是直方圖雙峰不明顯或圖像目標(biāo)和背景比例差異懸殊的圖像,OSTU算法較其他算法效果好[9]。但傳統(tǒng)OSTU方法只考慮了統(tǒng)計(jì)意義內(nèi)的目標(biāo)像元和前景像元整體內(nèi)部灰度均值的差異特性,忽略了類(lèi)別內(nèi)各像元的內(nèi)聚性,使求得的閾值出現(xiàn)邊界模糊、分類(lèi)不準(zhǔn)確的現(xiàn)象;此外該算法采用的是遍歷搜索算法來(lái)求解各灰度對(duì)應(yīng)的類(lèi)間方差,其計(jì)算量大,耗時(shí)長(zhǎng)。因此本文采用綜合類(lèi)內(nèi)方差和類(lèi)間方差指標(biāo)來(lái)構(gòu)建閾值,并采用CSO對(duì)其進(jìn)行優(yōu)化。



將式(2)作為CSO的目標(biāo)函數(shù)即適應(yīng)度函數(shù)來(lái)搜索全局最優(yōu)位置。
(1) 設(shè)置算法相關(guān)參數(shù)。種群規(guī)模、公雞、母雞、小雞比例因子以及更新代數(shù)。
(2) 計(jì)算雞群的適應(yīng)度值,初始化個(gè)體當(dāng)前最好位置和雞群全局最好位置。
(3) 位置更新及每個(gè)個(gè)體適應(yīng)度值計(jì)算,更新最優(yōu)個(gè)體值和全局最優(yōu)值迭代直到滿足停止條件。
設(shè)搜索空間為維;種群規(guī)模為,第只公雞在維空間的覓食軌跡為

第只母雞在維空間的+1時(shí)刻位置為


其中,rand為[0,1]均勻分布,randn為高斯分布;1為第只母雞自身所在群中的公雞;2為整個(gè)雞群中公雞和母雞中隨機(jī)選取的任意個(gè)體,且2不等于1。
+1時(shí)刻在母雞周?chē)捠常⑹茉撃鸽u跟隨公雞影響的第只小雞在維空間的活動(dòng)軌跡為

其中,為第只小雞對(duì)應(yīng)的母雞;為跟隨系數(shù),取值為[0,2];為學(xué)習(xí)因子;為小雞的自我學(xué)習(xí)系數(shù)。
(4) 輸出全局最優(yōu)值,即為最佳分割閾值。
3 實(shí)驗(yàn)結(jié)果與分析
3.1 實(shí)驗(yàn)結(jié)果
為了避免單一成像條件、地物結(jié)構(gòu)對(duì)整體提取結(jié)果的影響,本文采用了4幅尺寸大小分別為3279×5412,800×1243,1733×2194和1013×1003的高分二號(hào)衛(wèi)星影像進(jìn)行水體信息自動(dòng)提取。
對(duì)于光學(xué)圖像而言,水體信息的有效提取常常決定于閾值的選擇。選擇3279×5412大小的高分二號(hào)衛(wèi)星影像(圖4(a))為實(shí)驗(yàn)區(qū)域,圖4(b)和圖4(c)為手動(dòng)選取的閾值,其閾值分別為0.19和0.21,圖4(d)為本文OSTU算法自動(dòng)選取的閾值為0.20的效果圖。
通過(guò)對(duì)比分析可知,當(dāng)閾值選擇較小的0.19時(shí),會(huì)造成暗色地物尤其是高大建筑物陰影錯(cuò)提為水體的情況出現(xiàn);當(dāng)選擇0.21較大閾值時(shí),則可造成水體信息丟失,漏提一些細(xì)小的水體情況出現(xiàn)。此外閾值的選擇具有很強(qiáng)的隨機(jī)性,通常需要經(jīng)過(guò)大量的試驗(yàn)才能得到分割效果較好的閾值,是否為最佳閾值無(wú)法確定。而OSTU算法可以自適應(yīng)地進(jìn)行最佳閾值的確定。如圖4(d)紅框部分所示,OSTU算法能夠較為完整地提取水體信息,并有效抑制其他地物對(duì)水體信息提取的影響。
OSTU算法本身存在計(jì)算量大、耗時(shí)長(zhǎng)的問(wèn)題,通過(guò)引入全局尋優(yōu)較強(qiáng)的CSO則能夠很好地解決此問(wèn)題,見(jiàn)表3。通過(guò)對(duì)4個(gè)試驗(yàn)區(qū)域進(jìn)行實(shí)驗(yàn),可知本文算法對(duì)閾值選擇效率有了很大地提高,而且所選區(qū)域越大,信息量越多,算法的優(yōu)化性能越突顯。
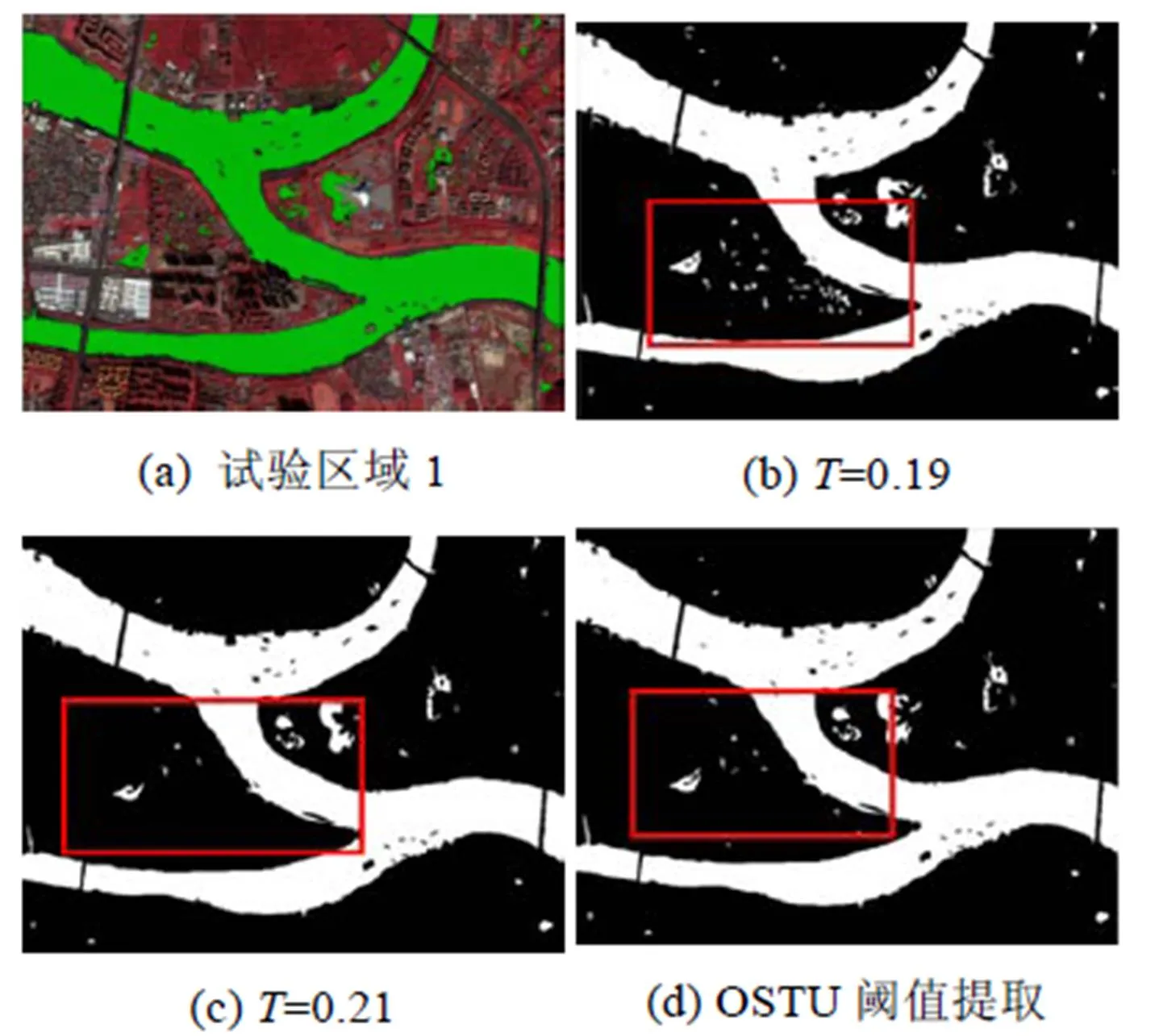
圖4 不同閾值對(duì)水體信息提取的影響

表3 OSTU性能優(yōu)化前后對(duì)比圖(s)
為了體現(xiàn)本文水體指數(shù)的優(yōu)越性,本文做了3組實(shí)驗(yàn),所選數(shù)據(jù)中水體形狀各異,實(shí)驗(yàn)區(qū)域中地物復(fù)雜程度逐漸增加,體現(xiàn)出本文方法的普適性和有效性,如圖5所示。

圖5 實(shí)驗(yàn)區(qū)域2水體提取結(jié)果
(1) 第1組實(shí)驗(yàn)為非城市區(qū)域,陰影區(qū)域較少。改進(jìn)的譜間關(guān)系法的提取效果最差,主成分分析綜合則漏提了許多小面積水體,NDWI方法和本文方法提取精度較高,本文方法且能提取更多的水體信息,精度提高了3.18%。
(2) 第2組實(shí)驗(yàn)為城市區(qū)域,水體面積較大,無(wú)細(xì)小支流,陰影區(qū)域明顯。通過(guò)對(duì)比分析改進(jìn)譜間關(guān)系法提取精度最差,主成分分析綜合法和NDWI在無(wú)誤提的前提下,小面積水體信息丟失較多。本文方法能夠有效將陰影和水體區(qū)分開(kāi)來(lái),如圖6所示。

圖6 實(shí)驗(yàn)區(qū)域3水體提取結(jié)果
(3) 第3組實(shí)驗(yàn),地物最復(fù)雜且存在細(xì)小支流。3種常見(jiàn)方法無(wú)法提取細(xì)小支流,而且存在少量陰影噪聲無(wú)法去除。本文方法能夠很好地將細(xì)小支流提取出來(lái),且能提取小面積水體,陰影區(qū)分效果也很好,圖7中紅框部分是3種常見(jiàn)方法無(wú)法消除的陰影噪聲。
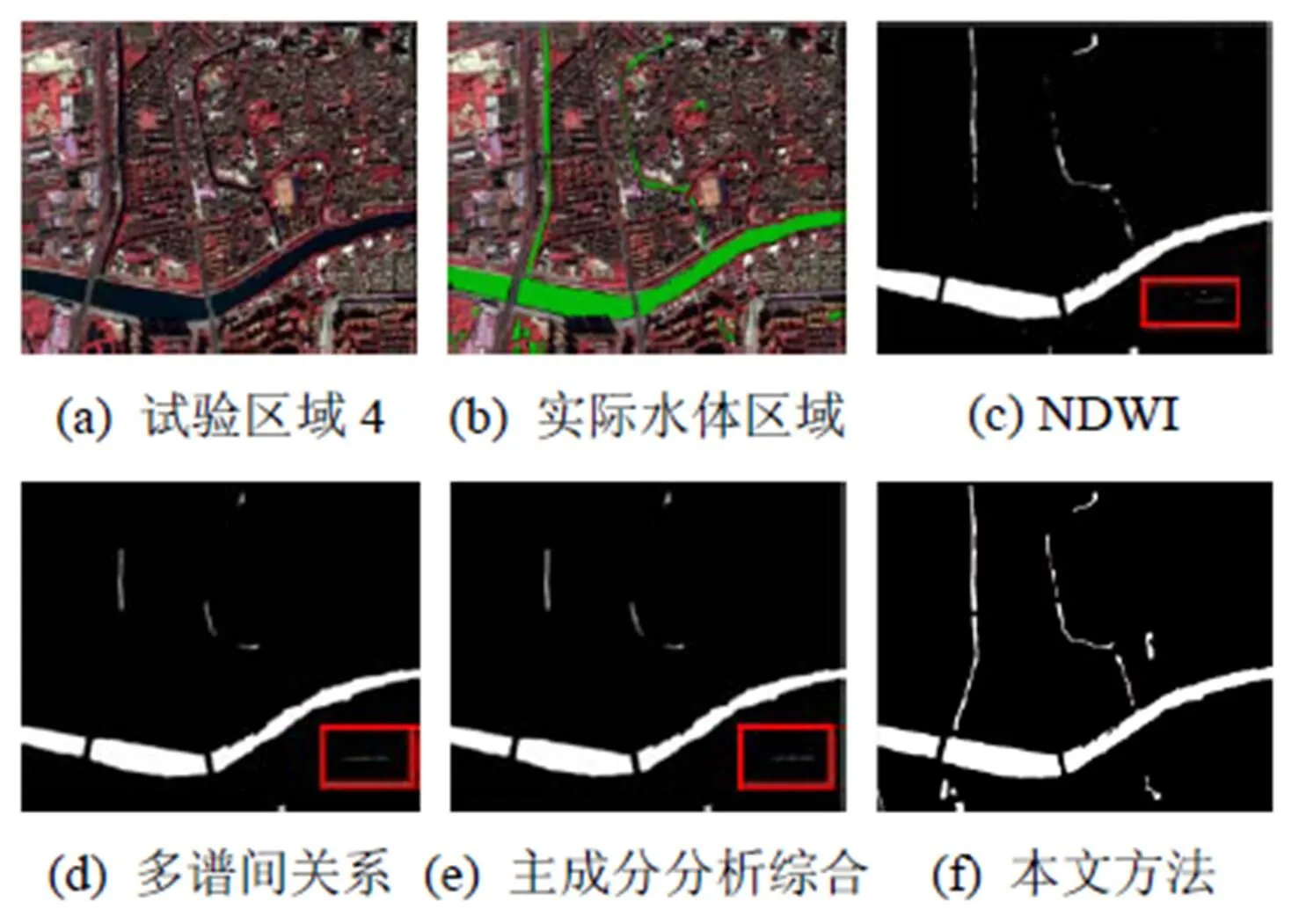
圖7 實(shí)驗(yàn)區(qū)域4水體提取結(jié)果
3.2 精度評(píng)價(jià)與分析
為了定量評(píng)價(jià)本文算法檢測(cè)的有效性,選用漏檢率來(lái)對(duì)算法做評(píng)價(jià),并用同一時(shí)間的Google Earth影像作為輔助數(shù)據(jù),目視解譯結(jié)果作為參考圖。在每個(gè)研究區(qū)域隨機(jī)選取700個(gè)樣本點(diǎn),為了消除陰影等暗色地物的影像,本文只采用總體精度S(Overall accuracy)[12]指標(biāo)來(lái)評(píng)價(jià)每個(gè)區(qū)域水體信息提取的效果,總體精度反映的是實(shí)際檢測(cè)到的水體比率。
其中,real為真實(shí)檢測(cè)到的水體區(qū)域;total為標(biāo)準(zhǔn)參考圖上的真實(shí)水體區(qū)域總數(shù)。
從表4中可以看出,已有的適用于高分辨率遙感影像水體信息提取的方法無(wú)論是在非城市區(qū)域還是城市區(qū)域,水體信息提取精度都比不上新提出的NCWI水體信息提取方法的精度。改進(jìn)譜間關(guān)系法和主成分分析方法在建筑物陰影較大的時(shí)候,水體精度很差,閾值無(wú)法自動(dòng)獲取;NDWI和NCWI方法能夠較為準(zhǔn)確地提取水體信息,但是NDWI容易出現(xiàn)誤提和漏提,精度比不上NCWI水體指數(shù)方法。
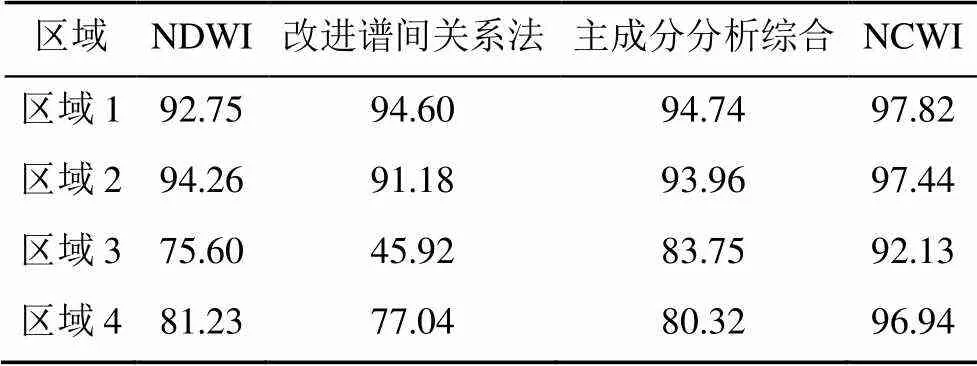
表4 不同水體方法提取精度對(duì)比(%)
4 結(jié)束語(yǔ)
本文在水體信息自動(dòng)提取方面,對(duì)所選擇的每個(gè)區(qū)域影像只選用一個(gè)全局閾值進(jìn)行圖像二值化處理。在實(shí)際應(yīng)用中,所選區(qū)域較大,為了提高提取結(jié)果的精度,可將大幅影像分成許多小窗口[13],然后在每個(gè)窗口運(yùn)用優(yōu)化之后的改進(jìn)OSTU算法進(jìn)行閾值的自動(dòng)計(jì)算,自適應(yīng)確定最佳分割閾值。本文算法無(wú)論是在陰影區(qū)域還是非陰影區(qū)域,水體信息提取的整體效果較好,但是當(dāng)裁剪區(qū)域內(nèi)高大陰影區(qū)域正好投射在暗色地物上時(shí),水體信息提取精度會(huì)受到一定影響,接下來(lái)將進(jìn)一步研究。此外,本文算法提出的水體指數(shù)同樣也適用于Landsat8高分辨率影像中的水體信息提取。
[1] 付勇勇, 王旭航, 鄧勁松, 等. 采用國(guó)產(chǎn)GF-2遙感影像的復(fù)雜水網(wǎng)平原水體信息提取[J]. 浙江大學(xué)學(xué)報(bào): 工學(xué)版, 2017(12): 2474-2480.
[2] 童李霞, 燕琴, 駱成鳳, 等. 基于NDWI分割與面向?qū)ο蟮乃w信息提取[J]. 地理空間信息, 2017, 15(5): 57-59.
[3] 柯麗娟, 趙紅莉, 蔣云鐘. 基于GF-1衛(wèi)星遙感影像提取水體的方法比較[J].甘肅科技, 2015(10): 18-21.
[4] 趙慧童, 王萍, 張娜, 等. 基于GF-1遙感數(shù)據(jù)的城市水體信息提取方法研究[J]. 測(cè)繪與空間地理信息, 2017, 40(10): 70-73.
[5] GUO Q D, PU R L, LI J D, et al. A weighted normalized difference water index for water extraction using Landsat imagery [J]. International Journal of Remote Sensing, 2017, 38(19): 5430-5445.
[6] WANG X, XIE S, ZHANG X, et al. A robust multi-band water index (MBWI) for automated extraction of surface water from land sat 8 OLI imagery [J]. International Journal of Applied Earth Observation and Geoinformation, 2018, 68: 73-91.
[7] 周小莉, 郭加偉, 劉錕銘. 基于陸地成像儀影像和主成分分析的水體信息提取——以鄱陽(yáng)湖區(qū)為例[J].激光與光電子學(xué)進(jìn)展, 2016(8): 77-84.
[8] 齊慶超, 張小磊, 金江峰, 等. 基于光譜角匹配算法的水體信息提取研究[J].測(cè)繪與空間地理信息, 2016, 39(2): 93-96.
[9] 趙紫薇. 基于OSTU算法利用新型水體指數(shù)進(jìn)行Landsat數(shù)據(jù)自適應(yīng)閾值水體自動(dòng)提取研究[J]. 測(cè)繪與空間地理信息, 2016(9): 57-60.
[10] MENG X B, LIU Y, GAO X Z, et al. A new bio-inspired algorithm: Chicken swarm optimization [C]// International Conference in Swarm Intelligence. Berlin: Springer, 2014: 86-94.
[11] 孔飛, 吳定會(huì). 一種改進(jìn)的雞群算法[J]. 江南大學(xué)學(xué)報(bào): 自然科學(xué)版, 2015, 14(6): 681-688.
[12] 張偉, 趙理君, 鄭柯, 等. 一種改進(jìn)光譜角匹配的水體信息提取方法[J]. 測(cè)繪通報(bào), 2017(10): 34-38.
[13] 袁欣智, 江洪, 陳蕓芝, 等. 一種應(yīng)用大津法的自適應(yīng)閾值水體提取方法[J]. 遙感信息, 2016, 31(5): 36-42.
A Fast Water Information Extraction Method Based on GF-2 Remote Sensing Image
ZOU Cheng1,2,YANG Xue-zhi1,2,DONG Zhang-yu1,2,WANG Dong1,2
(1. School of Computer and Information, Hefei University of Technology, Hefei Anhui 230009, China; 2. Anhui Province Key Laboratory of Industry Safety and Emergency Technology, Hefei Anhui 230009, China)
It is difficult to distinguish water from shadow (especially the shadows of tall buildings) and dark ground objects in high resolution remote sensing images, especially in GF-2 remote sensing images. This study analyzes the spectral features of typical terrains of the GF-2 remote sensing images through a lot of experiments. A new comprehensive water index method (NCWI) is proposed to enhance water body region information; and then, the improved method of maximum between-class variance (OSTU) combining with the chicken swarm optimization algorithm (CSO) are used to quickly and adaptively determine the optimal segmentation threshold to obtain the final water body region. To demonstrate the effectiveness of the proposed algorithm, the method of NDWI algorithm, the multi-band spectrum-photometric algorithm and the principal component analysis synthesis algorithms are used for comparison in water-body extraction. The confusion matrix and the field sampling are applied as the statistical metric to quantitatively evaluate the performance of the algorithms mentioned above. The verification results indicate that the new method can be used to extract quickly and effectively extract water body information, and the accuracy reached 97.82%, 97.44%, 92.13%, 96.94% respectively.
GF-2 image; water extraction; new comprehensive water index; OSTU; shadows of tall buildings; chicken swarm optimization
TP 391
10.11996/JG.j.2095-302X.2019010099
A
2095-302X(2019)01-0099-06
2018-07-05;
2018-07-19
國(guó)家自然科學(xué)基金項(xiàng)目(41601452);安徽省省重點(diǎn)研究與開(kāi)發(fā)計(jì)劃項(xiàng)目(1704a0802124)
鄒 橙(1992-),女,湖北荊州人,碩士研究生。主要研究方向?yàn)閿?shù)字圖像處理。E-mail:912826890@qq.com
董張玉(1986-),男,安徽合肥人,副教授,博士。主要研究方向?yàn)檫b感信息。E-mail:dzyhfut@hfut.edu.cn
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52