一種用于月面著陸的知識輔助單脈沖前視成像方法
2019-03-07 01:41:12陳洪猛魯耀兵孫晗偉易曉麗穆賀強
載人航天 2019年1期
關(guān)鍵詞:方法
陳洪猛,魯耀兵,劉 京,孫晗偉,易曉麗,穆賀強
(北京無線電測量研究所,北京 100854)
1 引言
月球探測是人類進行宇宙探索的開始,可以大大豐富人類對外太空世界的認識。特別是月球自身蘊含的豐富礦產(chǎn)以及得天獨厚的地理優(yōu)勢,使得科學(xué)家們對于月球的研究和開發(fā)表現(xiàn)出極大的興趣[1-3]。早在20世紀60年代到70年代[4-5],美國和前蘇聯(lián)這兩個超級大國就開展了激烈的太空軍備競賽,并極大地促進了探月技術(shù)的發(fā)展。近年來我國陸續(xù)開展了載人航天工程和探月工程,并且在相關(guān)方面進行了大量的研究工作[6-8]。
月面具有月海和高地兩種典型月貌,其中月海約占全月面的17%。由于外天體撞擊及太陽輻射,月海和高地中還分布著壑谷、陡坡以及隕石坑,這給月球車等探測器的安全著陸帶來了很多挑戰(zhàn)。月面地形是影響載人著陸安全的關(guān)鍵因素之一,可能引起著陸器傾斜、結(jié)構(gòu)損壞甚至傾覆。因此選取平坦安全的著陸區(qū),進行實時在線的地形探測和障礙規(guī)避是月面著陸的一項關(guān)鍵技術(shù)。早期的月球著陸探測任務(wù)主要通過航天員的觀察和操縱實現(xiàn)著陸[9],激光掃描儀可以實現(xiàn)對著陸區(qū)域的成像,但在其工作時刻需要滿足著陸器穩(wěn)定懸停的條件。光學(xué)敏感器可以實現(xiàn)對著陸區(qū)域的障礙物識別,其中立體視覺法和紋理分析法是常用的技術(shù)[10]。Horn等[11]提出一種利用單幅圖像的地貌重構(gòu)方法(Shape from Shading, SFS) 求解像素點的相對高程,吳偉仁等[12-14]利用單幅圖像進行月面著陸障礙識別與安全區(qū)域選取。雷達作為一種對地觀測的重要傳感器系統(tǒng),具有全天候、全天時、高分辨的特點[15]。由于著陸器在著陸過程中主要工作在前視或下視探測的模式,因此,我們擬將雷達前視探測技術(shù)用于著陸器的月面著陸過程中。
針對傳統(tǒng)的單脈沖雷達系統(tǒng)前視分辨率不高的問題[16],本文提出一種適用于月面著陸的知識輔助單脈沖前視成像方法,該方法可以提高對月表信息的成像精度和分辨率,從而著陸器在著陸過程中能避免月表的壑谷、陡坡和隕石坑等區(qū)域,實現(xiàn)月面的安全著陸。
2 知識輔助的單脈沖前視成像
假設(shè)著陸器相控陣雷達與地面雜波塊之間的幾何構(gòu)型如圖1所示。著陸器以速度V沿y軸正方向水平飛行,高度為H;天線波束的斜視角為θ,相對水平方向的俯仰角為φ。假設(shè)雷達有兩個接收通道,A和B為等效的兩個子孔徑天線的相位中心,陣元間距為D。設(shè)A和B組成的全孔徑相位中心為C,O是天線波束照射區(qū)域的中心,波束照射范圍內(nèi)地面某一雜波散射體用P表示,則用R0表示全孔徑相位中心C到天線波束照射中心O的距離,R1表示全孔徑相位中心C到點目標P的距離,R2和R3分別為子孔徑A和B到點目標P的距離。
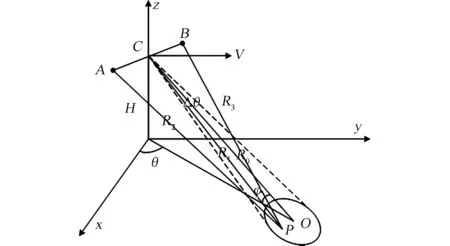
圖1 機載雷達觀測幾何構(gòu)型 Fig.1 Geometrical configuration of airborne radar
假設(shè)雷達發(fā)射線性調(diào)頻信號(LFM),如式(1)所示:
(1)
其中τ為快時間,fc為發(fā)射雷達信號的載頻,γ為線性調(diào)頻率,Tp為脈沖持續(xù)時間,rect(τ/Tp)表示歸一化的矩形函數(shù),經(jīng)過距離壓縮和距離走到校正之后,兩個天線接收到的回波信號可分別為式(2)、(3):
(2)
(3)
其中si(τ,t)表示第i個天線接收到的回波信號,Ta=Na·Tr表示相干積累時間(CPI),Tr表示脈沖重復(fù)周期(PRT),Na表示方位向的相干積累脈沖數(shù)。
在理想條件下,考慮到R3-R2=Dsinθ,以場景中心參考點O所在的距離做運動補償。設(shè)波束控制信號決定的電線波束指向為θ0,目標位置在θ=θ0+δθ處,δθ小于半個天線波束半功率點,此時通道1與通道2之間的相位誤差φ可以寫成式(4):
(4)
通常情況下φ0經(jīng)過天線陣中移相器相移的補償之后,實際上送到和差比較器去的兩個接收單通道的相位差為δφ,因此經(jīng)過移相器補償之后的和差兩路信號變?yōu)槭?5)、(6):
散射點目標的達到角度估計(Direction of Arrivals, DOA) 通常采用歸一化單脈沖曲線來測得,即差通道信號與和通道信號的歸一化比值曲線如式(7)所示:
(7)
此時,散射點的到達角為式(8):
(8)
其中Kim表示K的虛部。從上面的分析可知,我們可以繪制每個可能目標的波達方向(DOA)的單脈沖曲線(Monopulse Curve, MPC),即可求得空間所有點目標的位置。然而,在實際情況下,MPC曲線是非理想的,直接采用測得的MPC曲線進行單脈沖成像,會致單脈沖成像性能大大降低。接下來,我們將具體分析由于接受通道1和2的不一致性所引起的單脈沖成像誤差下降的問題。
由于雷達接收機通道間的不一致性,很難滿足和差通道矢量正交的條件。假設(shè)雷達接收機兩個通道的不一致性可以建模為式(9)~(10):
(9)
(10)

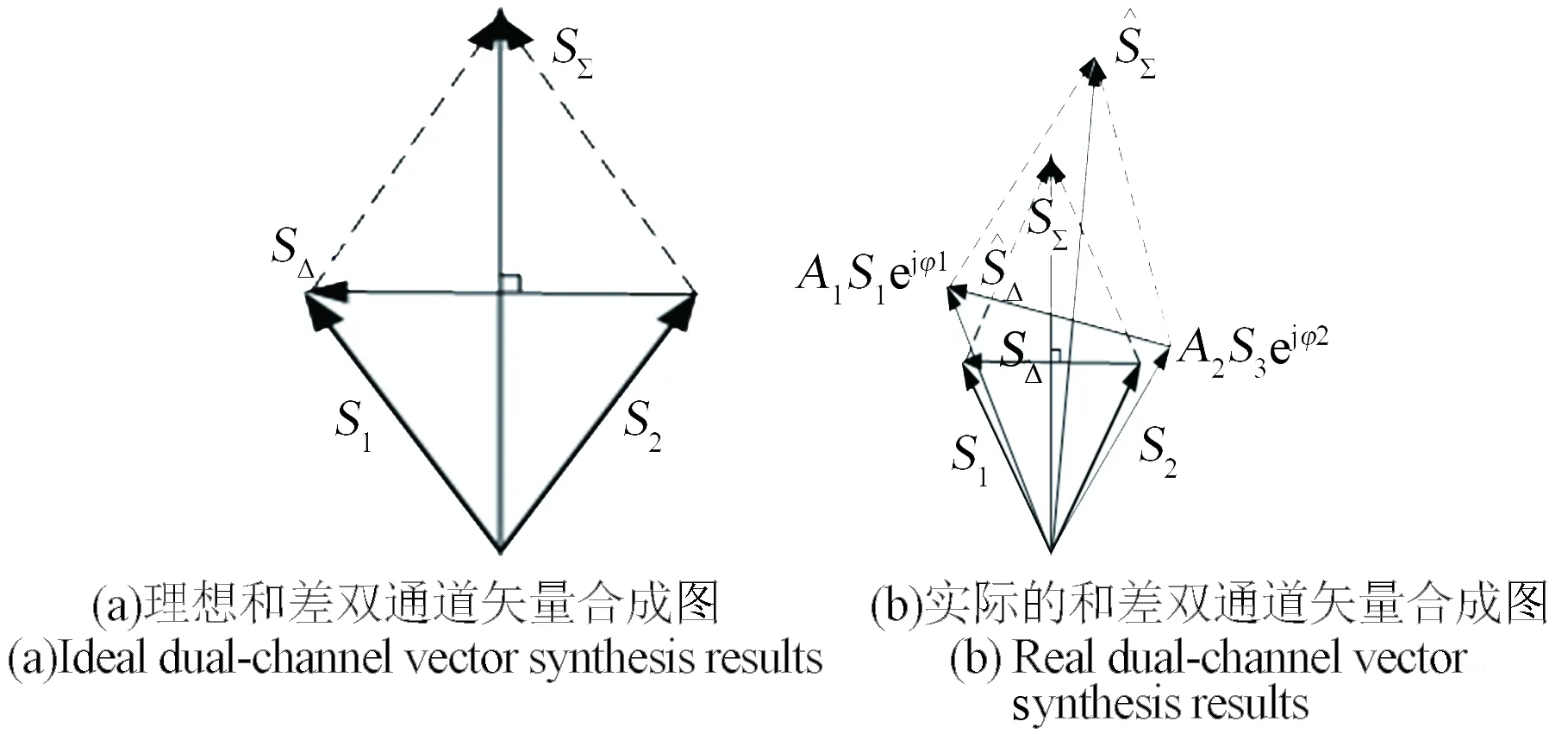
圖2 不同的矢量合成示意圖對比結(jié)果Fig.2 Comparison of different dual-channel vector synthesis results
因此,以場景中心參考點O所在的距離做運動補償,并作化簡,我們可以得到實際情況下的MPC曲線如式(13)所示:
(13)
進行歐拉展開,如式(14)所示:
(14)

為了具有通用性,我們只對最終的和差通道信號進行補償,而不考慮和差通道合成之前的情景,對式(14)進行合并化簡,可得式(15):
(15)
其中,
然后,我們將進行相位補償,如式(16)所示:
(16)
其中,φcom是相位補償因子,可得式(17):
(17)
最后經(jīng)過相位補償之后,相位條件滿足式(18):
(18)
經(jīng)過相位補償后,最終的MPC曲線為式(19):
(19)
由于本文方法與傳統(tǒng)方法的主要區(qū)別在于考慮了接收通道之間的相位誤差,而相位誤差的估計可以利用微波暗室的測量結(jié)果進行估計,相位誤差的補償主要是對數(shù)據(jù)進行一個相位因子的相乘操作,這個相位因子可以提前以正弦、余弦表的形式存儲在處理芯片的內(nèi)存中,并且單純的乘法操作對處理芯片而言占用時間很小,相較于每次的單脈沖成像處理時間可以忽略,因此本文方法與傳統(tǒng)方法的計算復(fù)雜度近似相當(dāng)。
3 實測數(shù)據(jù)結(jié)果與分析
為驗證本文算法的有效性,我們采用一組地球上的機載實測數(shù)據(jù)進行分析,系統(tǒng)參數(shù)如表1所示,雷達工作在前視成像模式。
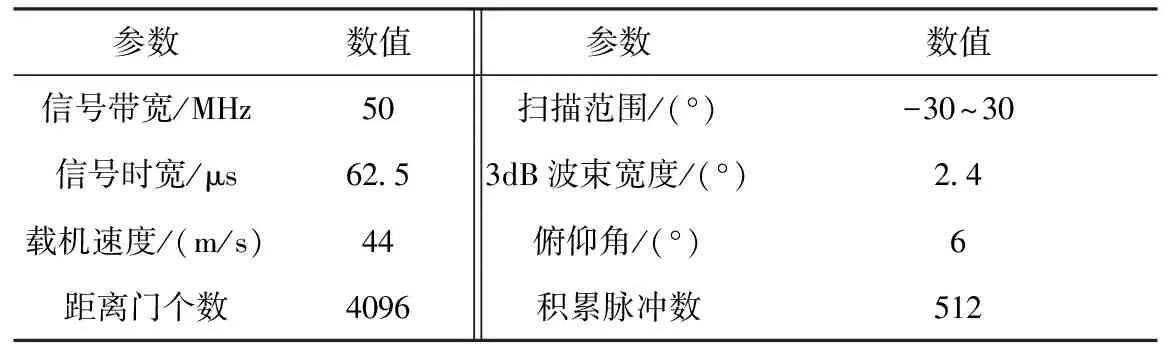
表1 系統(tǒng)參數(shù)
該組實驗數(shù)據(jù)在錄取時由于天線通道間幅相誤差的影響,在前視成像時存在成像結(jié)果模糊的問題。采用本文所提出的方法,首先基于式(18)對雷達系統(tǒng)的天線相位誤差進行估計,然后基于式(16)進行補償,得到如式(19)所描述的通道誤差補償后的MPC曲線,最后再進行前視成像。

圖3 天線相位誤差補償前后的MPC曲線對比Fig.3 Comparison of MPC before and after phase compensation
圖3給出了實際天線系統(tǒng)相位補償前后的MPC曲線對比結(jié)果。從圖3(a)可以看出,由于通道誤差的影響,實際的單脈沖測角曲線斜率很小,這說明單脈沖測角曲線的很大一部分能量泄漏到了實部分量,如果直接用此單脈沖測角曲線對目標進行定位勢必會引起定位精度的下降。但經(jīng)過相位補償后,圖3(b)的單脈沖測角曲線斜率變大,這樣會改善單脈沖前視成像的結(jié)果,有利于提升著陸器月面著陸時獲得高分辨的月面場景信息。
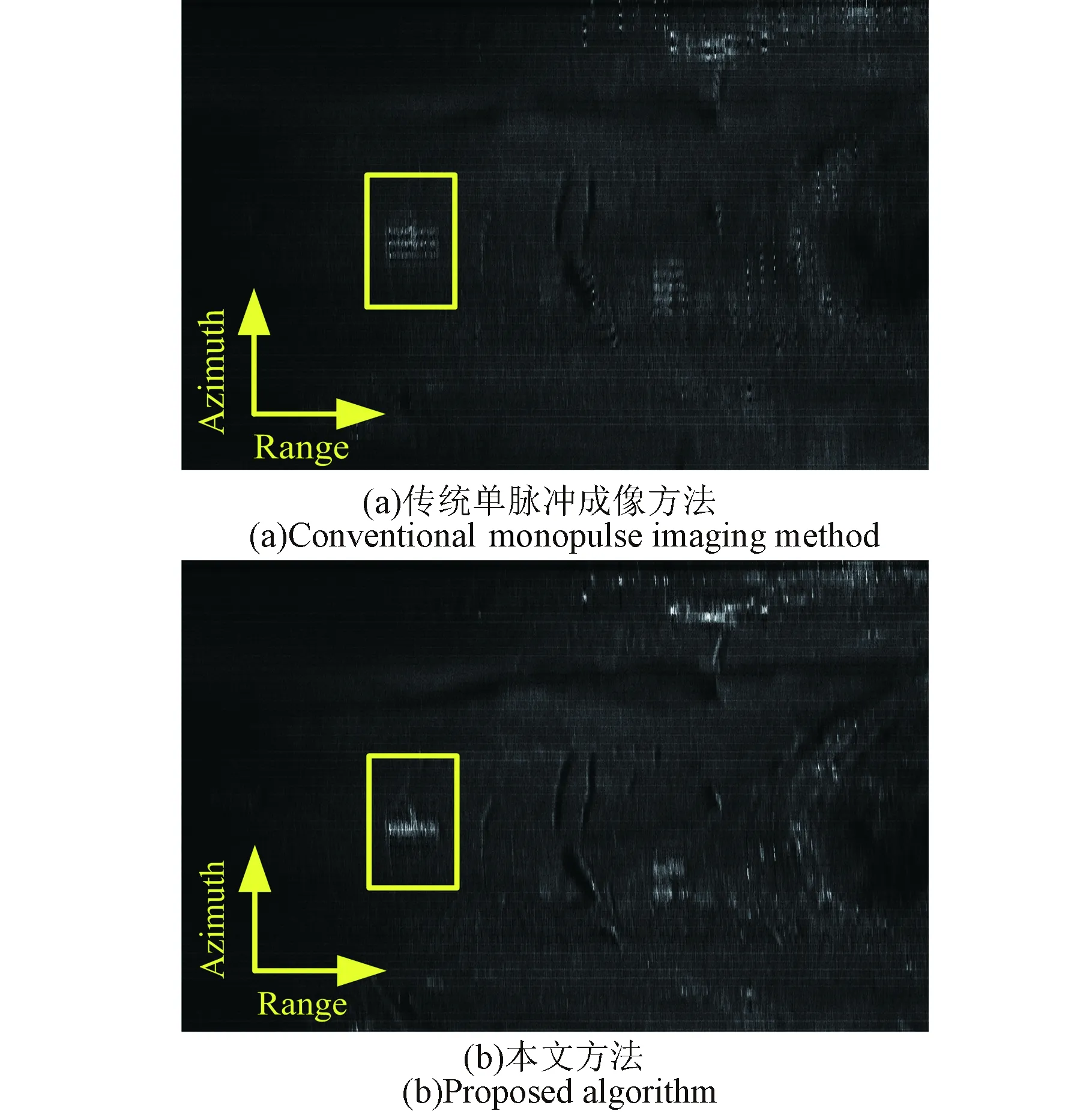
圖4 傳統(tǒng)單脈沖成像與知識輔助單脈沖成像效果對比圖Fig.4 Comparision of imaging results between conventional and proposed algorithms
圖4分別給出了傳統(tǒng)的單脈沖成像結(jié)果和本文方法對比圖,可以看出,雖然傳統(tǒng)方法也可以實現(xiàn)對地面場景的成像,但成像場景比較模糊。特別是對于一些強散射點區(qū)域,由于測角曲線的不準確,會出現(xiàn)許多“鬼影”,這大大影響了對地面場景信息的識別。但對于本文方法,不僅可以對地面場景進行高分辨成像,還可以抑制強散射點的“鬼影”現(xiàn)象。為了進一步對比這兩種方法的單脈沖成像效果,我們將成像場景中的同一個區(qū)域進行局部放大,局部放大結(jié)果如圖5所示。
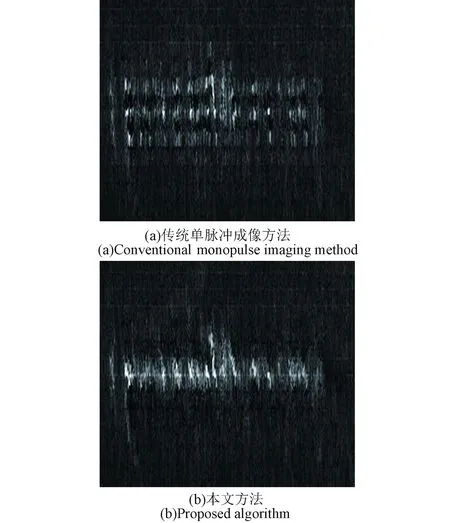
圖5 傳統(tǒng)單脈沖成像與知識輔助單脈沖成像效果局部對比圖Fig.5 Comparision of locally imaging results between conventional and proposed algorithms
從圖5(a)可以看出,傳統(tǒng)單脈沖成像方法雖然可以實現(xiàn)對地面場景的成像,但是強散射區(qū)域的成像結(jié)果容易產(chǎn)生“鬼影”模糊。從圖5(b)可以看出,知識輔助方法對地面場景的成像結(jié)果中幾乎沒有“鬼影”模糊現(xiàn)象,說明其對地面場景的成像效果更好,這主要是由于經(jīng)過天線信息的輔助信息的相位補償之后,改進的MPC曲線對復(fù)雜的成像環(huán)境更加穩(wěn)健。
基于實測數(shù)據(jù)的處理結(jié)果表明,本文方法的成像效果要優(yōu)于傳統(tǒng)的單脈沖成像方法,理論上可以用于著陸器著陸過程中的月面信息實時成像。在接下來的工作中,我們將對具有月海和高地兩種典型月貌的月面場景進行研究,在模擬月面的實驗室環(huán)境中進行著陸器月面著陸實時成像的驗證。
4 結(jié)論
針對月面著陸過程中的高分辨前視成像問題,本文將單脈沖前視成像方法引入到月面著陸過程中,并在此基礎(chǔ)上提出了一種基于知識輔助的穩(wěn)健前視成像方法。基于地球上的機載掛飛數(shù)據(jù)對該高分辨前視成像方法進行了實驗驗證。在地球?qū)嶒炛校谥R輔助前視成像算法是在專用的信號處理平臺上運行的,可以滿足時性要求,理論上其分辨率可滿足月面信息實時成像的要求,可應(yīng)用于月面自主軟著陸。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56