基于WOA算法的電動汽車感應驅動系統控制器的參數整定
2019-03-11 06:42:44張華磊呂江毅成林
山東農業大學學報(自然科學版) 2019年1期
關鍵詞:優化
張華磊,呂江毅,成林
基于WOA算法的電動汽車感應驅動系統控制器的參數整定
張華磊,呂江毅,成林
北京電子科技職業學院汽車工程學院, 北京 100176
為提高電動汽車感應驅動系統PID控制精度,將鯨魚優化算法與PID控制相結合,提出一種基于WOA算法的電動汽車用感應驅動系統控制器參數整定方法。為了獲取高質量的控制效果,選擇誤差絕對值時間積分性能指標為適應度函數。結果表明,在電動汽車電動機PID參數尋優過程中,與PSO-PID、GA-PID和PID相比,WOA-PID控制器的超調量更小和響應時間更快,控制品質更高,能夠更快地進入穩定狀態。
鯨魚優化算法; 電動汽車; 控制器; 參數
隨著純電動汽車的發展,如何快速高效地開發電動汽車是當前研究的熱點問題。純電動汽車研發的關鍵技術主要有電動汽車整車技術、蓄電池技術、能量管理技術和電機及其控制技術。電動汽車的電機是其電氣驅動系統的核心,電動汽車的性能直接由電機的控制技術、性能和效率決定。由于傳統的PID (Proportion, Integral, Differential)控制算法可靠性高、穩定性好以及簡單等優點,其被廣泛地應用于工業控制領域,而傳統PID控制的主要缺點在于其參數整定的適應性較差,由于電機系統的復雜性、非線性等問題,導致無法獲得滿意的控制效果[1]。
鯨魚優化算法[2](Whale Optimization Algorithm,WOA)是受座頭鯨捕食行為啟發而提出的一種新型啟發式算法,該算法具有調整參數少、操作簡單和易于跳出局部最優能力強的優點。針對傳統PID控制效果易受其參數選擇的影響,提出一種基于WOA優化PID的電動
汽車感應電機驅動系統的控制器參數整定方法。研究結果表明,本文算法可以有效提高電機控制效果,具有精度高和誤差小的優點。
1 鯨魚優化算法
在WOA算法中,每只座頭鯨的位置表示一個可行解,該算法具體描述如下[3]:
(1)環繞式捕食。座頭鯨能夠識別獵物的位置并進行包圍。如果當前的最佳鯨群個體位置為目標獵物,則位置更新策略如下:=|·*()+()| (1)
(+1)=()-·(2)
其中,和為系數;為當前迭代次數;()為當前鯨魚的位置向量;*()為當前最佳的鯨魚位置向量。
和計算公式如下:=2·1-(3)
=22(4)
其中,1和2為隨機向量,處于[0,1]之間;值由2線性下降到0。
=2-2/max(5)
其中,max為最大迭代次數。
(2)發泡網攻擊。該階段主要機制有收縮包圍機制和螺旋式位置更新,通過座頭鯨氣泡網建立數學模型,具體描述如下:
1)收縮包圍機制:該機制通過減小值實現,其中是隨機數,處于[-2,2]之間;當處于[-1,1]之間時,新鯨群個體搜索位置是食物所在位置,此時鯨魚靠近食物進行覓食;反之,則鯨魚遠離食物;

其中,¢=|*()-()|為第頭鯨群個體當前最佳位置與獵物的距離;為隨機數,處于[-1,1]之間;為對數螺旋形狀參數。座頭鯨在捕食獵物時,不但進行螺旋游動而且進行包圍收縮,其在以50%的概率在螺旋模型和收縮包圍機制之間進行位置更新,其數學模型為:

其中,為隨機數,處于[0,1]之間。
3)搜索捕食:當>1或<-1時,鯨群將進行移動搜索遠離獵物,借此尋找一個更加合適的獵物,突出WOA算法在全局搜索中的勘探功能,數學模型如下:
=|·X()-| (8)
(+1)=X-·(9)
其中,X為從當前鯨群中隨機選擇的位置向量,也就是隨機鯨群個體。
2 基于WOA的PID參數整定設計方案
2.1 PID控制
一般地,典型的PID控制框圖如圖1所示:
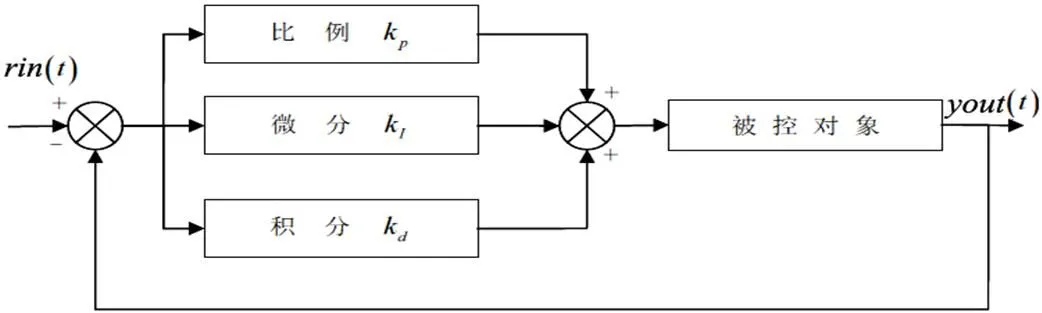
圖 1 PID控制系統框圖
PID控制器的偏差公式為:()=()-() (10)
其中,()、()分別表示輸入值和輸出值。
其中,K、T、T分別表示比例系數、積分時間常數和微分時間常數。
2.2 參數編碼
令鯨群中的搜尋個體數量為,每個鯨群的位置矢量由PID控制器的3個參數構成[4],其矩陣表達式為:

3 實證分析
WOA參數設置如下:種群規模為30,最大迭代次數為100,其優化結果如圖2和圖3所示:
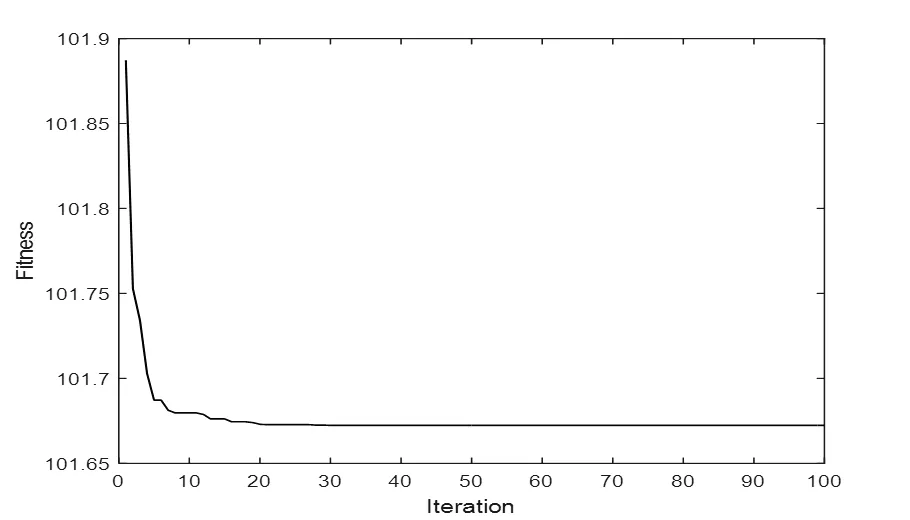
圖 2 WOA優化PID適應度曲線
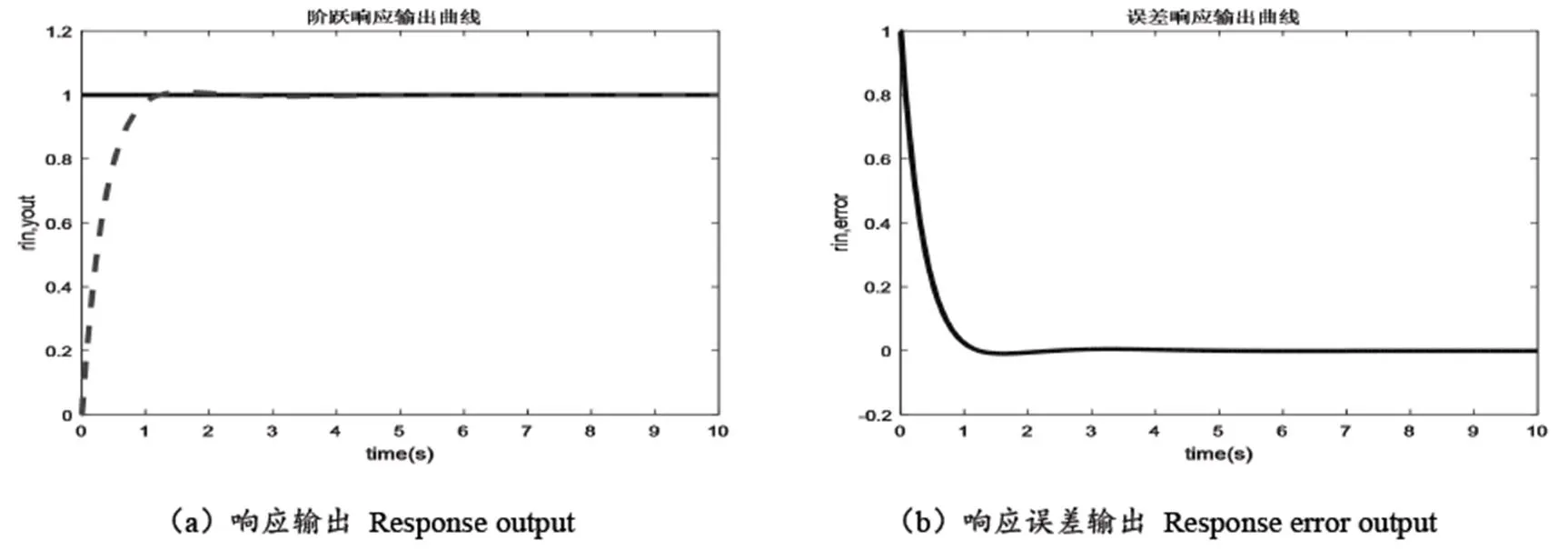
圖 3 WOA優化階躍響應曲線圖
為了驗證WOA算法進行PID優化的效果,將WOA與GA (Genetic Algorithm)和PSO (Particle Swarm Optimization)優化PID的結果進行對比,不同算法參數設置表1所示。不同算法的階躍響應輸出曲線和階躍響應誤差曲線進行對比,其對比結果如圖4和圖5所示。

表 1 不同算法參數設置

圖 4 不同算法適應度收斂對比圖
由圖4可知,在電動汽車電動機PID參數尋優過程中,WOA算法與PSO算法和GA算法相比較,WOA算法具有更快的收斂速度,同時其優化結果也優于PSO算法和GA算法。
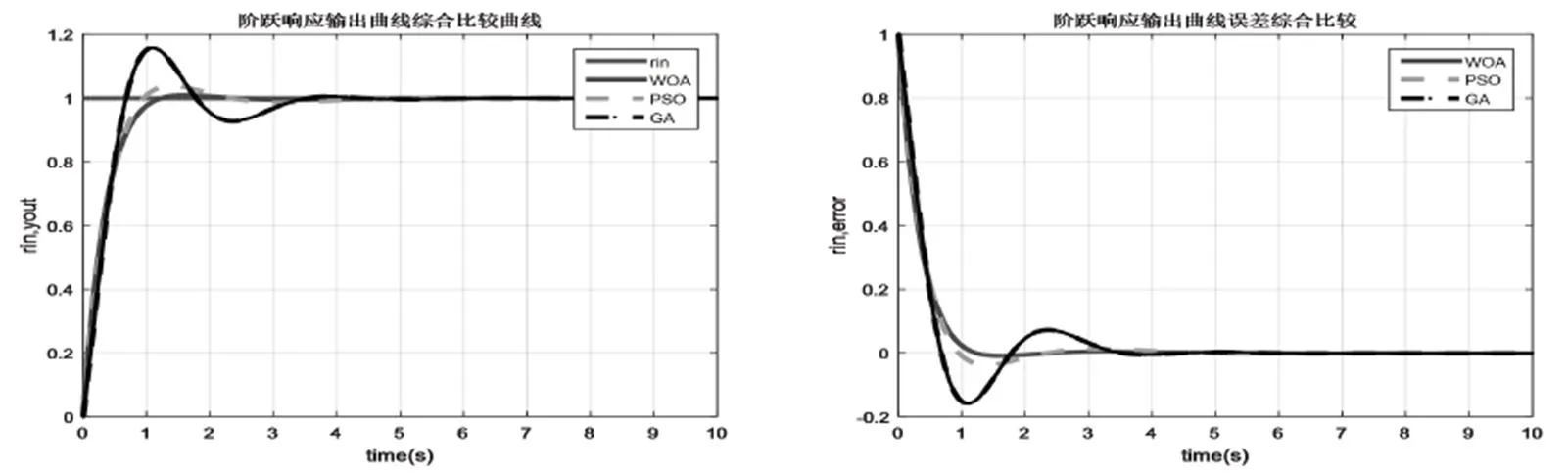
圖 5 不同算法階躍響應輸出曲線
由圖5不同算法階躍響應輸出曲線可知,WOA算法與PSO算法和GA算法相比較,WOA算法具有更低的誤差,從而體現出WOA算法進行電動汽車電動機PID參數尋優的有效性和可靠性。

表 2 PID參數和適應度函數值
由表2適應度函數值可知,與PSO算法和GA算法相比較,WOA算法具有更高的精度,進一步驗證了WOA算法進行電動汽車電動機PID控制的有效性和可靠性。

表 3 優化結果對比
由表3可知,與PSO-PID、GA-PID和PID相比,WOA-PID控制器具有超調量更小和更快的響應時間,控制品質更高,能夠更快的進入穩定狀態。
4 結論
由于電機系統的復雜性、非線性等問題,導致傳統的PID控制無法獲得滿意的控制效果。為提高電動汽車感應電動驅動系統PID控制精度,將鯨魚優化算法引入電動汽車感應電動驅動系統PID控制,提出一種基于WOA算法的電動汽車用感應電動驅動系統的控制器參數整定方法。研究結果表明,在電動汽車電動機PID參數尋優過程中,與PSO-PID、GA-PID和PID相比,WOA-PID控制器具有超調量更小和更快的響應時間,控制品質更高,能夠更快的進入穩定狀態。
[1] 張興華,孫振興,王德明.電動汽車用感應電機直接轉矩控制系統的效率最優控制[J].電工技術學報,2013,28(4):255-260
[2] Mirjalili S, Lewis A. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016,95:51-67
[3] Aziz MAE, Ewees AA, Hassanien AE. Whale Optimization Algorithm and Moth-Flame Optimization for multilevel thresholding image segmentation[J]. Expert Systems with Applications, 2017,83:242-256
[4] 劉和平,鄧力,鄭群英,等基于矢量控制的電動轎車感應電機驅動控制器[J].電工技術學報,2007,22(11):63-68
[5] 馬文華,劉欣彤,劉海波,等.基于滑模觀測器的電動汽車用感應電機驅動控制[J].微特電機,2017,45(7):68-73
Parameter Adjustment for Induction Drive System Controller of an Electric Vehicle on WOA
ZHANG Hua-lei, LV Jiang-yi, CHENG Lin
100176,
In order to improve the PID control precision of electric vehicle induction electric drive system, WOA-PID was presented to adjust parameters of an induction drive system controller on an electric vehicle. In order to obtain satisfactory excessive process dynamics, the error absolute time integral performance index was taken as the minimum objective function of the parameter selection. The results showed that the WOA-PID controller had smaller overshoot and faster response time and higher control quality than PSO-PID, GA-PID and PID in the optimization of electric vehicle motor PID parameters. It could get into a faster stable state.
WOA; electric vehicle; sensor; parameter
U469.72
A
1000-2324(2019)01-0163-04
10.3969/j.issn.1000-2324.2019.01.037
2018-02-06
2018-03-27
張華磊(1975-),男,碩士,講師,主要從事汽車技術服務. E-mail:13520092245@139.com
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
