自適應機器人手的研究現狀與展望
2019-03-13 01:21:30苑航
科技與創新 2019年4期
苑航
(洛陽市第一高級中學,清華大學天津高端裝備研究院洛陽先進制造產業研發基地眾創空間,河南 洛陽 471000)
機器人手(或稱為抓持器)與人手相似,機器人能夠完成許多任務有賴于一雙能夠抓取多種物體的末端抓持器。通用抓持器在機器人領域中有廣泛的用途,可將機器人與物體臨時連接起來,在適當的時候能夠釋放,是機器人與外界交互的重要終端,在工業自動化領域中有廣泛用途。
在抓持器研究領域,除了工業夾持器之外,研究較多的有仿人機器人手、仿生機器人手、自適應欠驅動機器人手三類,它們各有優缺點。
1 機器人手的發展概況
1.1 仿人機器人手
美、日、德、英、加拿大等發達國家和我國的高校與科研院所積極研制機器人手,其中,有模仿人手的機器人手,將其設計為具有更多的手指,且手指上具有若干關節。比如UTAH/MIT 手[1]、Salisbury 手[2]、Gifu-III手[3]、Robonaut R2手[4]、Shadow 手[5]、DLR/HITHand[6]、BH-III手等。此外上海交大、華中科大、北理工、中科院等機構均對此開展了深入研究。Shadow手如圖1所示。
靈巧手的傳感控制非常復雜,制造和維護成本高昂,抓取不同形狀尺寸的物體均需要實時檢測與抓取規劃,影響其的廣泛使用,目前仍然停留在實驗室研究使用階段。
Shadow靈巧手具有5個手指,主要材料采用聚甲醛塑料和鋁合金,通過CANBUS/EtherCAT母線進行位置和力的控制。該手的關節自由度多達22個(不含腕部2個自由度),該手采用了藏入前臂中的22套空氣肌肉、閥組和電機來驅動控制每個關節的靈巧動作。因為該手結構過于復雜,成本很高,因此價格非常昂貴,目前還很難大量應用。
哈爾濱工業大學與德國宇航中心聯合研制了DLR/HIT-I手、DLR/HIT-II手[6]兩代靈巧手,如圖2所示。每個手指均藏入了控制器DSP和控制器FPGA,手掌中是一塊FPGA,控制時需要用上位機電腦進行操控,相當復雜。
在抓取中,由于物體形狀各異,如果利用多指手以合適構型抓取該物體,勢必會造成實時檢測與規劃手部各關節轉角位置的困難,因而多指機器人靈巧手的使用難度大,實時傳感與控制方法目前還不能低價實現,因此靈巧手的應用遇到了瓶頸。

圖 1 Shadow 手

圖 2 DLR/HIT-I手、DLR/HIT-II手
1.2 仿生機器人手
機器人不一定是人的形狀,機器人手也不一定按照人手的形狀來設計。機器人手的作用是實現抓取,上述的多指靈巧手是研發機器人的一種“捷徑”——模仿人手,此外還有多種方式,只要能夠達到抓取物體的效果即可。例如模仿生物的“手”——不同的動物與外界交互和接觸物體的部件都可以看做是該動物的“手”,因此從生物中獲得靈感就可以誕生具有仿生學意義的仿生機器人手,也稱為特種機器人手。北京航空航天大學與德國Festo公司聯合研制了一種仿章魚觸手,如圖3所示。該仿章魚觸手模仿了生物的柔性,適合抓取圓柱狀物體,對于其他異形物體的抓取能力有限。Festo公司研制的模仿蜥蜴舌頭的抓持器如圖4所示。此抓持器采用水作為介質,利用氣力作為驅動源,將彈性薄膜和內部的活塞、彈簧等結合起來綜合實現了一種具有吸盤效果和被動手指生成效果相疊加的新型通用抓持器。該抓持器適合抓持較小高度的物體和平板物體,但是對于尖銳和高度較大的物體抓取效果受變形程度的限制而無能為力,同時抓取力量偏小,此外,抓取存在延時、抓取效率低、噪聲較大、能耗較高問題。
1.3 自適應欠驅動機器人手
隨著科技的發展,欠驅動手應運而生。欠驅動手是采用少量電機驅動多個關節,其中能夠實現自適應抓取的稱為自適應欠驅動手,近十年來受到很多研究學者的青睞,已經開發出來一些新型欠驅動手,平夾自適應手是其中的佼佼者。目前缺少衡量機器人手的統一定量比較標準,一般按照抓取物體種類、抓取物體動作過程與結果(抓取方式)、抓取適用情況、抓取裝置的設計、制造與維護成本、抓取裝置的弱點或不足等多個方面綜合進行比較。
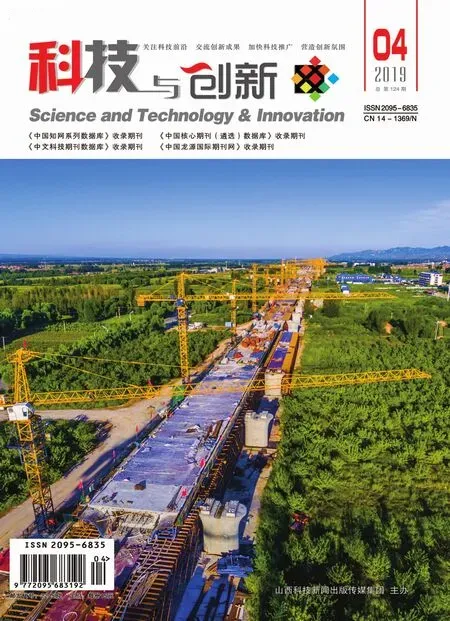
Robotiq公司是知名的欠驅動機器人手公司,開發的平夾自適應手如圖5所示[7]。平夾自適應手的核心是將平夾與自適應兩種人手非常常用的抓取模式復合起來。該手僅有兩個手指,也只能一次抓取一個物體,也很難同時抓取不同方向雜亂擺放在包裝箱內的物體。

圖3 仿章魚觸手

圖4 仿蜥蜴舌頭手

圖5 Robotiq手
2 自適應通用抓持器的研究現狀
2.1 Mason抓持器
由于抓取物體的多樣性,抓取原理與方式變化莫測,因此產生了眾多抓持器。為了抓取雜亂擺放的物體且一次抓多個物體,卡內基·梅隆大學Mason教授團隊研制了看似非常簡單,但是效果很好的抓持器,如圖6所示。該抓持器僅有3個手指,每個手指的中部沒有關節,僅僅在手指與手掌之間存在關節。實驗證明該抓持器控制簡單,一次能抓取多個雜亂擺放的物體。其不足之處在于剛性手指對表面摩擦力小、自重大的物體抓取困難。
2.2 Scott抓持器
1985年,英國帝國理工大學Scott教授團隊研制了一種伸縮管自適應通用抓持器Omnigripper[8],簡稱Scott抓持器,如圖7所示。該夾持器具有兩組伸縮管陣列,每根桿相互平行,由物體推動長桿來適應物體形狀,液壓驅動兩組伸縮管合攏或分離,實現物體抓取。其不足之處在于:①抓持具有方向性,無法做到多向抓持。該裝置對目標物體施加抓取力時,只能沿著兩組伸縮管合攏的方向。②對于超過寬度的長條物體不能抓取。當目標物體的長度方向與抓持方向一致且目標物體長度超過該裝置的寬度,目標物體不會因兩組伸縮桿合攏而受到抓持力。
2.3 滑管陣列與伯努利吸盤復合抓持器
2010年,瑞典學者研制了伸縮桿陣列與伯努利吸盤復合抓持器[9],如圖8所示,成功從二維伯努利吸盤升級為三維伯努利吸盤。利用伸縮桿來適應物體的形狀,并利用伯努利方法吹氣產生局部負壓把物體吸住。由于增加了伸縮桿陣列,使得原來僅能用于平面物體吸取的伯努利負壓吸盤抓持器變為三維物體光滑表面均可以吸取,其不足在于僅能抓取表面光滑的物體。
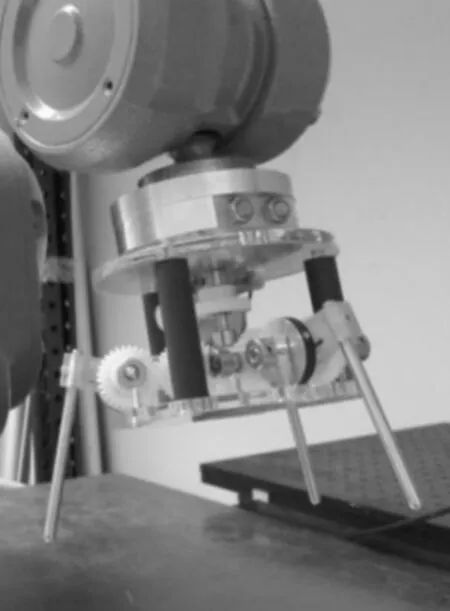
圖 6 Mason 抓持器
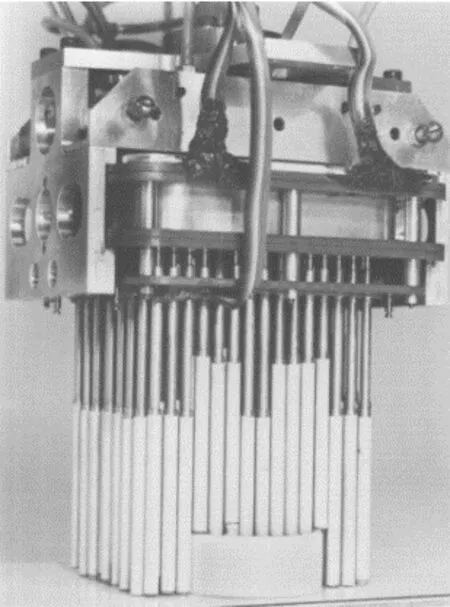
圖 7 Scott抓持器
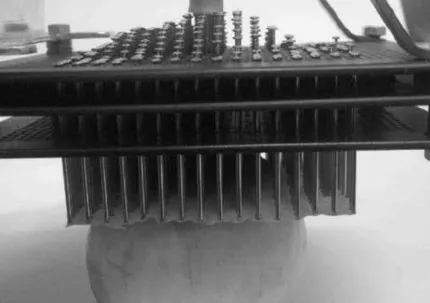
圖8 伸縮管陣列與伯努利吸盤復合抓持器
3 結語
傳統機器人手模仿人手設計為多指裝置,它們能夠抓取多種物體,但是結構復雜、控制程序煩瑣和成本昂貴。沒有手指的特種手如吸盤手適應范圍相當有限。一般的通用抓持器為了降低成本而被制作成具有兩個相對運動的部分,以便最簡單地實現抓取和釋放功能。這種方式結構簡單,成本低,能夠較好抓取某種形狀物體,但是不能較好適應更多形狀物體,適應性不高。本文總結了國內外自適應通用抓持器的研究成果分析及其特點和不足,從而推斷出增加手爪的適應能力成為一個突出的問題。機器人手爪未來發展趨勢如下:①手爪小型化、輕量化,而抓重大幅增長;②自適應抓取不同形狀尺寸物體的能力提高,抓取穩定、成功率高;③能夠對多個物體同時進行抓取,具有良好的適應性;④結構簡單,成本低;⑤控制容易,抓取時對物體形狀尺寸檢測、抓取規劃控制難度降低。