武漢地鐵第三軌受流器動態接觸力測量模型及參數標定
2019-03-15 12:36:44劉子知閆曉暉吳繼成徐鴻燕
城市軌道交通研究 2019年3期
阮 杰 劉子知 閆曉暉 吳繼成 徐鴻燕
(1.武漢理工大學現代汽車零部件技術湖北省重點實驗室,430070,武漢;2.武漢地鐵運營有限公司,430035,武漢;3.中鐵第四勘察設計院集團有限公司電化處,430063,武漢//第一作者,講師)
第三軌受流器動態接觸力的變化情況直接影響軌道車輛受流質量的高低[1]。受流器滑靴所受的載荷隨第三軌激勵而不斷發生變化,滑靴與第三軌之間有較大電流通過,加上第三軌表面硬點對滑靴產生的沖擊,使得受流器與第三軌之間的接觸情況十分復雜,其接觸力無法直接測得[2]。因此,需要通過設計開發第三軌受流器動態接觸力測量裝置來間接測量靴軌動態接觸力。
接觸力的間接測量方案和參數標定直接決定動態接觸力測量結果的準確性和有效性,而目前我國對此研究較少。文獻[3-6]在對鐵路車輛第三軌與受流器之間的接觸壓力和動態響應進行測試的過程中,使用應變片對受流器滑靴的接觸壓力進行測量,但并未對等效慣性質量進行計算或標定。
本文設計了使用應變片和加速度傳感器對第三軌受流器動態接觸力進行檢測的測量方案,通過靜力學和動力學的理論建立了靴軌動態接觸力與應變值和加速度值的計算關系式,最后設計了受流器靜態和動態標定試驗,并獲得了上述計算關系式中的相關參數。
1 第三軌受流器動態接觸力測量系統方案
1.1 受流器結構
以武漢地鐵某線列車使用的某型下接觸式受流器(以下簡為“受流器”)為研究對象,該受流器由固定部分、擺動部分、轉軸和彈簧組成。其中固定部分包括安裝底座和阻尼減震器;擺動部分包括擺臂、滑靴支座和滑靴。受流器三維模型如圖1所示。
1.2 測量系統方案
由受流器的結構可知,當受流器處于工作狀態時,第三軌對滑靴的壓力會使受流器擺臂產生一定的彎曲變形。因此,可以通過在受流器擺臂表面粘貼應變片傳感器來間接測量受流器和第三軌之間的接觸壓力。慣性力部分可參考已有弓網動態力測量方法,即使用加速度傳感器進行測量,安裝位置為振動幅度較大的滑靴支座中心位置。受流器簡化模型與測量方案如圖2所示。該方案配合使用應變片傳感器和加速度傳感器來間接測量受流器和第三軌間的動態接觸力。
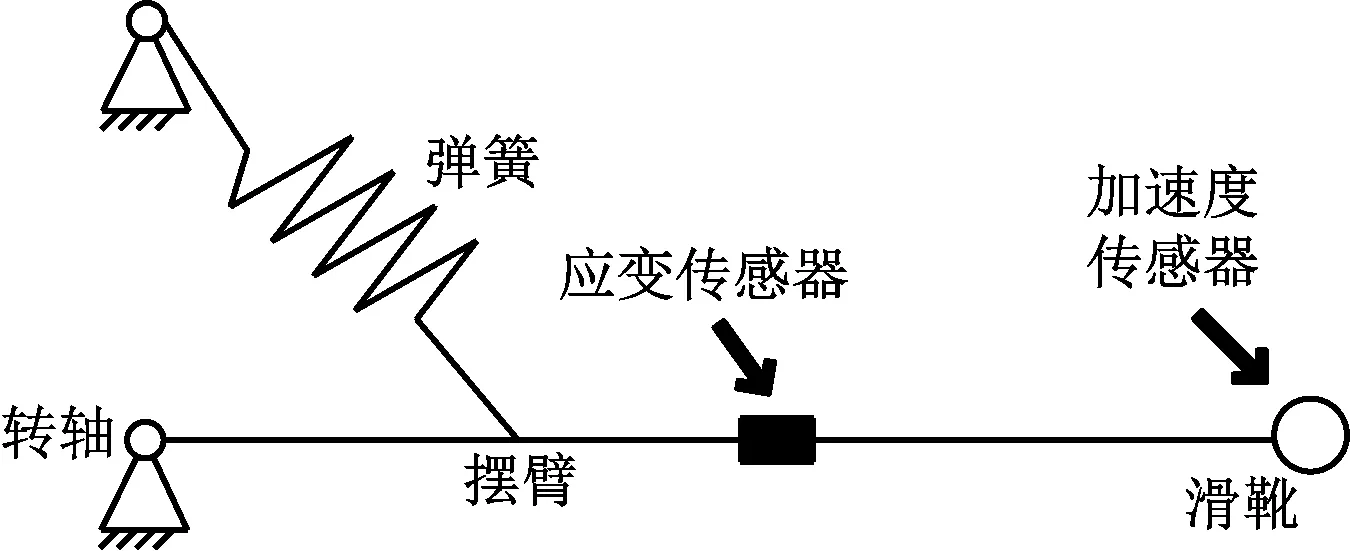
圖2 受流器簡化模型與測量方案
1.3 應變片布置位置的確定
應變片布置位置的選擇需考慮以下因素:①表面平整,且便于應變片粘貼牢固;②應變變化平緩;③工作中能產生足夠大的應變值。
參考目標受流器的安裝說明書,第三軌與受流器的靜態接觸壓力為120 N±24 N。取120 N作為靴軌靜態接觸壓力,由有限元分析結果可知,擺臂表面的應變值隨著擺臂到彈簧安裝孔軸線距離的縮小而逐漸變大,距離彈簧安裝孔軸線10~30 mm處的擺臂表面應變值的數量級為(10-5~10-4)ε0(ε0為應變)。該數量級符合電阻應變片的測量靈敏度要求。最終選擇距離滑靴支座中心線95 mm處的擺臂截面作為應變片橫向中心截面。
2 第三軌受流器測量模型理論分析
2.1 靜力學分析
在滑靴上表面中心施加靜力載荷,并對受流器簡化結構進行受力分析,如圖3所示。設滑靴中心到應變片中心的距離為L,滑靴中心到轉軸軸線的距離為L1,應變片中心到轉軸軸線的距離為L2。對滑靴上表面施加靜力F,受流器擺臂繞轉軸向下的轉動角度為θ。
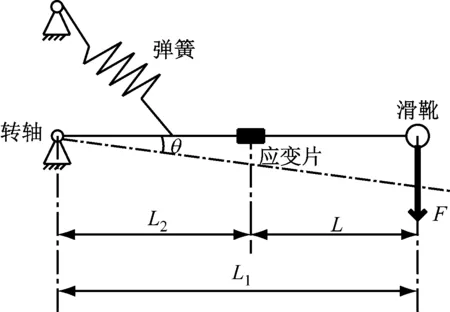
圖3 受流器結構受力示意圖
當發生橫力彎曲時,彎矩隨截面位置變化而變化。一般情況下,在形狀規則的同一截面上,最大應力發生于離中性層最遠處。應變片粘貼中心處擺臂截面幾何形狀近似為矩形,則應變片中心截面彎矩M和擺臂表面應變ε成正比關系,即:
M=WEε
(1)
式中:
W——抗彎截面系數;
E——擺臂楊氏模量。
由此可得ε和F的關系為:
F=WEε/L
(2)
設比例系數k為:
k=WE/L
(3)
則有:
F=kε
(4)
其中,k可以采用靜態標定試驗得到更為精確的結果,且采用數值計算得到的k可以和由靜態標定試驗得到的比例系數ks作對比分析。
2.2 動力學分析
受流器擺臂和滑靴因承受動態壓力而產生的振動必然會伴隨加速度和慣性力,因此需要對受流器進行動力學分析。建立滑靴動態載荷與擺臂表面貼應變片中心處的應變值和滑靴中心點的加速度之間的關系式,為后續受流器的動態標定試驗和對比驗證提供理論依據。

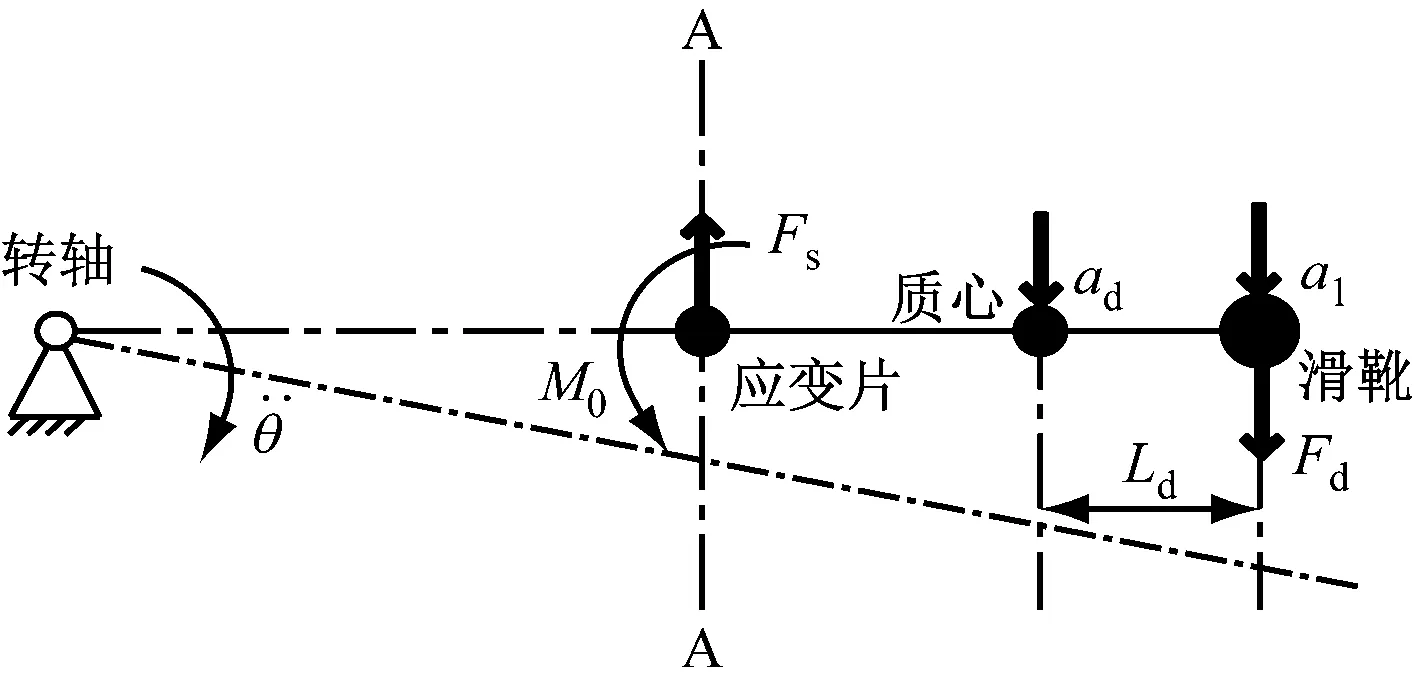
圖4 動載作用下受流器局部受力示意圖
(5)
(6)

ad/a1=(L-Ld)/L1
(7)
(8)
結合靜力學理論分析結果,可得Fd表達式:
(9)
設右段擺臂等效質量為me,則:
me=[Id+md(L-Ld)×(L1-Ld)]/(L/L1)
(10)
由靜力學分析可知,kd為常數,則式(9)可簡化為:
Fd=kdε+mea1
(11)
3 第三軌變流器動態接觸力測量系統參數標定
3.1 受流器靜態標定試驗
將受流器底座用螺栓安裝在固定支架底板上,如圖5所示,把擺臂調整到與X軸平行的位置后將轉軸鎖死,在受流器滑靴支座中心位置下部懸掛砝碼鉤。通過增減標準砝碼,給受流器提供靜態載荷。在測量截面上、下表面分別粘接2片相同的應變片,并按全橋方式連接到應變儀。
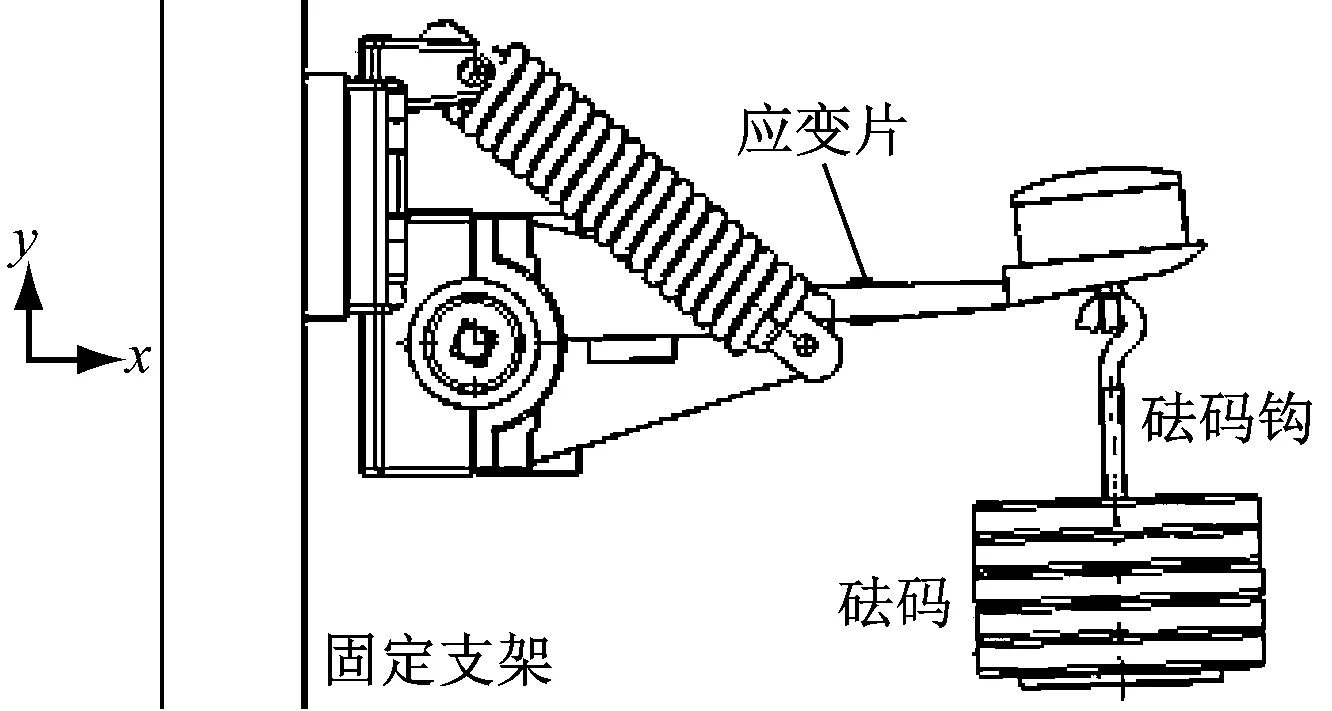
圖5 靜態標定試驗裝置
測量時,在砝碼鉤托盤上逐塊加載砝碼,通過DH 5922數據采集儀測量應變值。在加載和減載兩種情況下各測量兩組數據,并求得4次測量應變值的平均值。
對靜態載荷數據與平均應變值進行線性擬合分析,即可得到受流器擺臂應變片的應變與滑靴中心所承受靜態載荷之間的比例系數,如圖6所示。
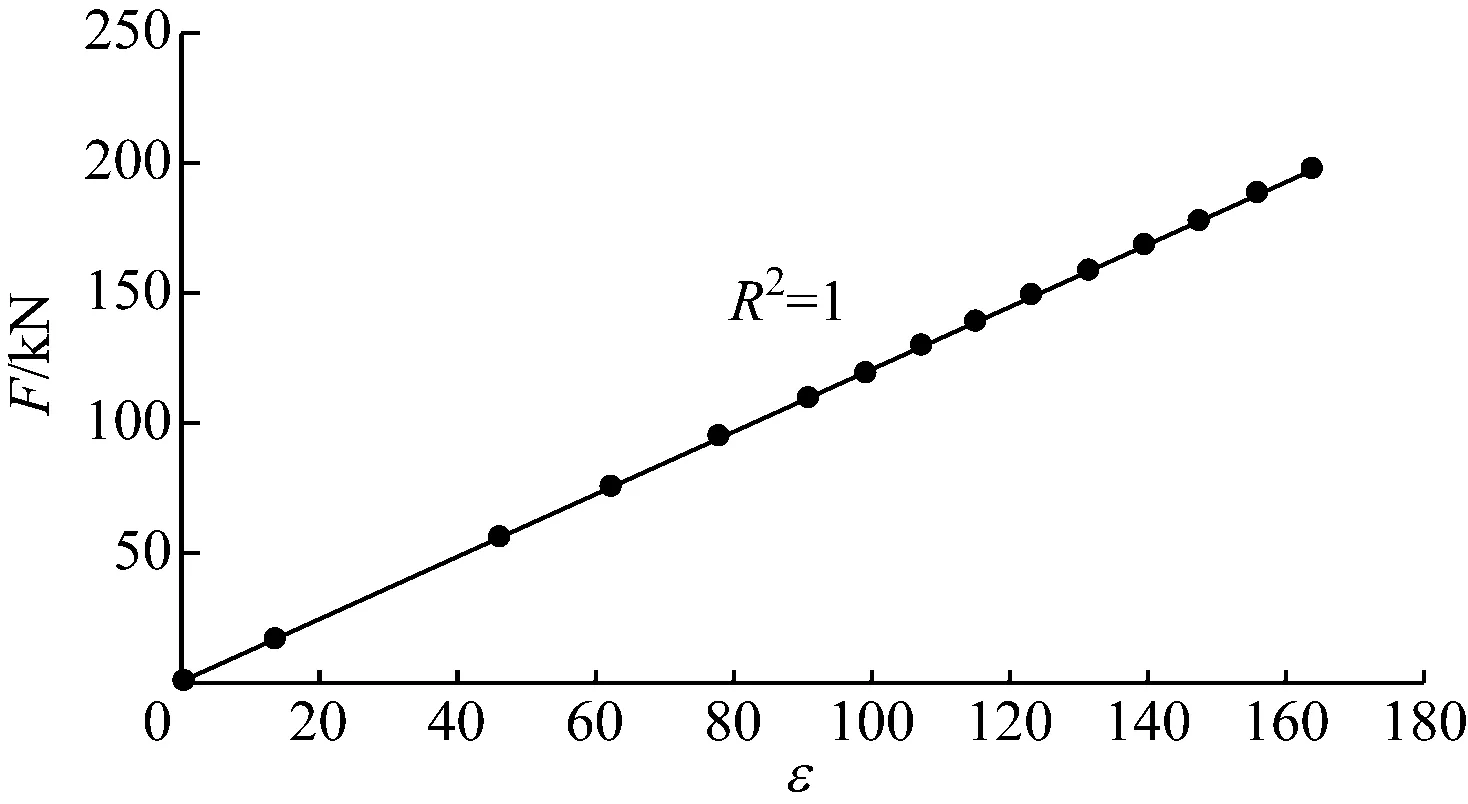
圖6 靜態標定線性擬合分析圖
進行線性擬合后得到的結果如下:
F=1.208 8ε-0.115
(12)
式(12)中,0.115為擺臂重量修正值。由圖6線性擬合分析得到線性相關度R2為1,表明F與ε之間的線性度極高。由靜態標定試驗測得比例系數ks為1.208 8。
3.2 受流器動態標定試驗
由于受流器彈簧為拉伸彈簧,在滑靴支座不受力時處于壓縮狀態而不能產生受迫振動。因此,在滑靴支座正下方通過螺栓和轉接板剛性固連20 kg砝碼將受流器彈簧拉開,如圖7所示。動態標定試驗將使用激振器使滑靴支座在激振力作用下帶動擺臂繞轉軸產生受迫振動。力傳感器下端通過頂桿1和激振器可動部件相連,且其上端與頂桿2相連。將激振器底座調整到合適高度并轉動轉軸使頂桿2軸線對準砝碼中心軸線,將頂桿2與砝碼下端通過轉接螺母相連。將力傳感器的輸出信號接入DH5922儀器通道,并在軟件中分別設置好應變片、加速度計和力傳感器3個通道的參數。
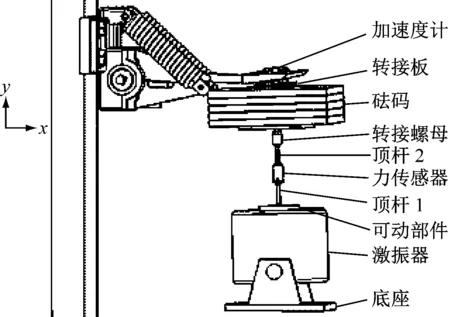
圖7 動態標定試驗裝置
根據圖7中的動態標定試驗裝置,將建立的受流器三維模型去掉滑靴部件,并在滑靴支座下方根據砝碼實際尺寸建立與滑靴支座固連的砝碼模型,并在CATIA(計算機輔助三維交互應用)軟件中測量其質量、質心位置和繞X軸對質心的轉動慣量,代入式(9)可得固連砝碼的右段擺臂等效質量理論計算值mo,c為22.3 kg。
將DH5922動態數據采集儀的采樣頻率設為5 000 Hz。并依次設定信號發生器的頻率為10.2 Hz、15.2 Hz、19.9 Hz、23.7 Hz、30 Hz、35.3 Hz、40 Hz、47.8 Hz、60 Hz、66 Hz、70 Hz、90 Hz和110 Hz,通過觀察力傳感器通道顯示的動態數據極值,在每種頻率下將激振力的幅值調整為15 N、30 N、45 N、60 N和75 N,其中激振力均為隨時間變化的正弦曲線。
由試驗測得的加速度和應變亦近似視為隨時間變化的等幅正弦曲線。為節省計算量,分別求取每組數據中加速度和應變的最大值和最小值,從而求出a1和ε。由式(11)可知,在動態標定試驗中,固連砝碼右段擺臂的等效質量mo,e為:
mo,e=(F-1.208 8ε)/a1
(13)
分別采集每種頻率下對應不同力幅值的5組動態數據。每組動態數據均包含加速度計、應變片、力傳感器隨時間變化的參數信息,采集時間大約為5 s。對測試數據進行整理及計算,如表1所示。表1中:mo,ave為同一頻率下5個等效質量測量值mo,e的平均值;mo,max和mo,min分別為同一頻率下5個等效質量中的最大值和最小值;(mo,max-mo,min)/mo,ave為相對極差,用于分析每一頻率同激振力幅值下mo,e的離散程度;(mo,c-mo,ave)/mo,c為數值計算差值,用于對mo,c與mo,ave的差值進行分析。
根據表1,將mo,e的計算數據繪制成三維圖,如圖8所示。

圖8 固連砝碼右段擺臂的等效質量
由圖8可知,當測試頻率為19.9 Hz和23.7 Hz時,右段擺臂的等效質量明顯降低;當測試頻率為47.8 Hz時,等效質量略有降低;在其他大部分測試頻率范圍內等效質量趨于恒定,且與mo,c較為接近。
將固連砝碼的受流器有限元仿真模型導入ANSYS軟件中進行模態分析,獲得前5階模態固有頻率。由模態分析結果可知,固連砝碼的受流器在23.2 Hz及46.2 Hz附近發生共振,這與理論計算時擺臂的剛體假定不一致,導致上述頻率附近動態標定數值出現偏差。
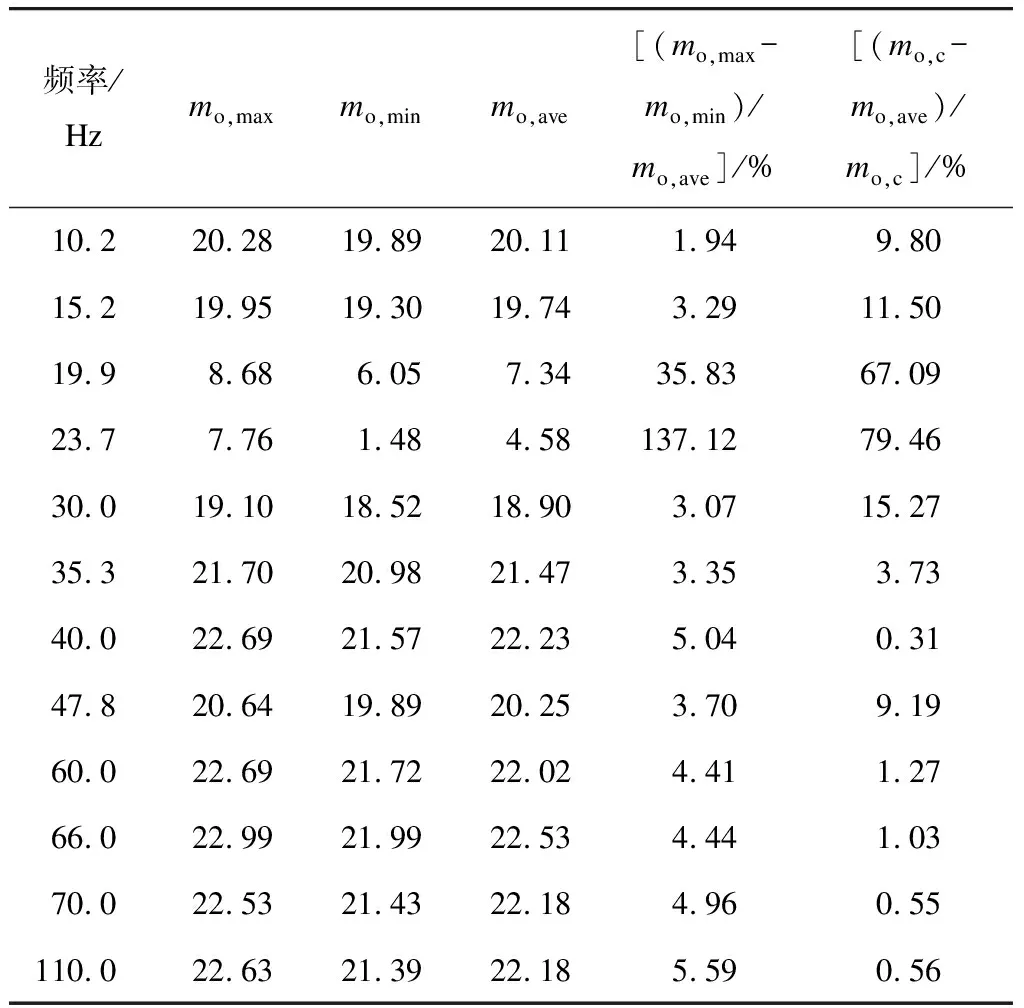
表1 動態標定實驗測試數據分析
因此,由數值計算差值可知,在23.2 Hz±13 Hz的1階固有頻率范圍內,等效質量數值計算值與試驗標定平均值差值較大,而在其他頻率下二者差值均在10%以內,且相對極差較小,進一步驗證了模型的精確性以及試驗的合理性。
3.3 受流器測量方案等效質量的計算
將受流器三維模型沿應變片橫向中心截面截成兩部分,在CATIA中測得各項參數,代入式(9)可得到剛體的右段擺臂等效質量數值計算值為2.585 kg。對去除掛載砝碼的受流器模型進行模態分析,獲得其1階固有頻率為118.5 Hz,遠大于受流器動態接觸力測量頻率,證明了等效質量計算結果有效。
4 結論
本文通過設計第三軌受流器動態接觸力的測量模型及參數標定試驗,得到如下結論:
(1) 設計了第三軌受流器動態接觸力測量方案,并根據有限元應變分析確定了應變片的安裝位置。
(2) 通過靜力學理論分析確定了滑靴表面壓力與擺臂表面貼應變片中心處應變值的線性關系。通過動力學理論分析建立了滑靴動態載荷、應變值和滑靴中心點加速度之間的關系式。
(3) 通過靜態標定試驗獲得受流器擺臂表面粘貼應變片位置的應變與滑靴中心所承受靜態載荷之間的比例系數。通過動態標定試驗獲得固連砝碼的右段擺臂等效質量,并與模型計算結果進行對比,驗證了測量模型和等效參數的精確性。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
山東工業技術(2016年15期)2016-12-01 05:31:22
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
