基于改進人工勢場的變形移動機器人路徑規劃
2019-03-18 04:32:51王領宮濤樊慶琢鄭義
智能制造 2019年3期
王領 宮濤 樊慶琢 鄭義
一、引言
人工勢場算法是—種常見的路徑規劃算法,該算法在數學公式的描述上簡潔,計算量較小,并且產生的路徑路線比較平滑。在路徑的生成上系統與環境實現了閉環,使系統的實用性和避障功能得到了加強。但是,通過研究發現,傳統的人工勢場存在以下問題。
(1)在相近障礙物間不能發現路徑。
(2)存在陷阱區域。
(3)在障礙物前振蕩。
(4)在狹窄通道中擺動。
(5)當目標附近有障礙物時無法達到目標點(GNRON)。
(6)規劃的路徑只考慮的路徑的安全性,并沒有對路徑進行優化。
由于以上問題的出現,在極個別的實際應用場合,規劃無法完成。通過數學分析,得知當障礙物與目標點十分接近的時候,此時機器人接近目標時,他同時也靠近障礙物,如果此時的排斥力大于吸引力,目標位置不能到達全局最小勢場,因而機器人停在障礙物附近不可能達到目標,即機器人的不可達問題(GNRON)。這是由于傳統的人工勢場算法存在缺陷,使該方法在處理具體問題中存在一定的局限性。因此,對傳統的人工勢場算法進行改進,特別對斥力場函數進行修改,使用改進后的模型進行路徑規劃,能夠較好的解決傳統模型缺陷帶來的目標不可到達問題。
二、傳統的人工勢場模型
將人工勢場法應用于路徑規劃是由Khatib首先提出的。他把機械手或者是移動機器人在環境中的運動視為在一種抽象的人造受力場中運動:目標點對機器人產生引力,障礙物對機器人產生斥力,最后根據合力來確定機器人的運動。
人工勢場法的基本思想:在目標位置構造引力勢場,在障礙物周圍構造斥力勢場,這兩個勢場共同作用形成復合人工勢場。機器人在引力勢場的引力和斥力勢場的斥力的共同作用下向目標運動。
我們把移動機器人、障礙物和目標點均簡化為一點,機器人的運動空間為二維的。機器人要到達目標點,需要不斷朝著目標點運動,因此,可以將目標點看作與移動機器人帶有相反極性的電荷,對機器人產生吸引力。同時由于機器人在運動過程中需要避開障礙物,因此,可以將障礙物看作與機器人帶有相同極性的電荷,對機器人具有排斥力,從而使機器人避開障礙物。同時,假設起始點帶有與機器人極性相同的電荷,從而開始規劃開始的時候推動機器人運動。
三、改進的人工勢場模型
如果機器人的目標點在障礙物的影響范圍之內,整個環境勢場的全局最小點就與目標點的位置不一致,這樣,當機器人靠近目標點的同時,斥力不斷增大,這就造成了不可達問題。
考慮到不能到達問題是由于在目標點處的勢場斥力函數過大造成的,考慮將斥力場函數與機器人和目標點的相對位置考慮在內,通過這個方式對斥力場函數進行體整,以保證全局勢場在目標點處為最小。
四、變形移動機器人的路徑規劃
我們把變形移動機器人看成一個點,如圖1所示,由目標點對移動機器人產生的引力Fatt,它是引力勢場函數的負梯度,即為:
五、仿真試驗
在建立的人工勢場模型的基礎上對變形移動機器人進行路徑規劃,機器人從起點開始,受到的合力作用下朝目標點進發,引力隨著機器人的靠近而減小,在全局范圍內為機器人導航,而障礙物的斥力隨距離的增減變化,但只有一定的作用范圍,因此對于每一個障礙物,其斥力僅在其周邊局部區域為機器人導航。具體的路徑規劃算法步驟如下。
(1)建立人工勢場模型,初始化移動變形機器人的參數,確定引力場和斥力場的正比例位置增益系數k和η,障礙物影響距離Po,以及移動步長l,(設定機器人勻速前進)的值。同時確定機器人起始位置x,按照具體的環境信息建立勢場模型。
(2)調用計算模塊,計算斥力和引力與x軸的角度,計算引力、斥力在x,y軸的分量,計算合力,計算合力與x軸的夾角。
(5)判斷機器人是否到達目標點,如果到達目標點,則終止規劃過程。
(6)如果機器人沒有到達目標點,再判斷前進步數是否到達規定步數,如果到達則表明無法找到完整路徑,需要調整模型參數,否則就返回第三步繼續執行。
下面討論不同的初始參數下得到仿真結果。
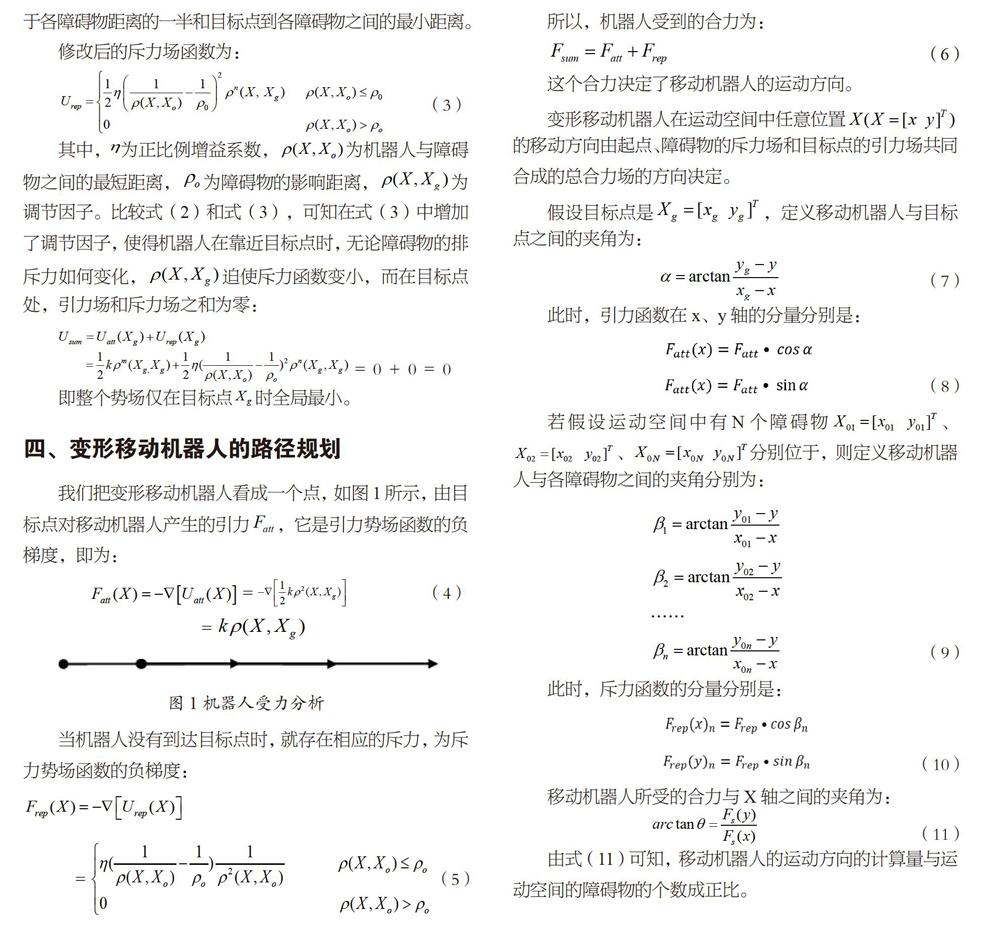
1、多障礙物情況下的仿真
利用MATLAB軟件進行仿真試驗,如圖2所示,起始點為[3,3],障礙物為[2.5,2.5]、[3,4]、[5,4]、[6,6.5]和[7,7],目標點為[9,9],引力場的正比例增益系數k為3,斥力場的正比例增益系數η為1,障礙物影響距離Po為3,移動步長l設為0.5,得到如圖2所示的路徑仿真結果。
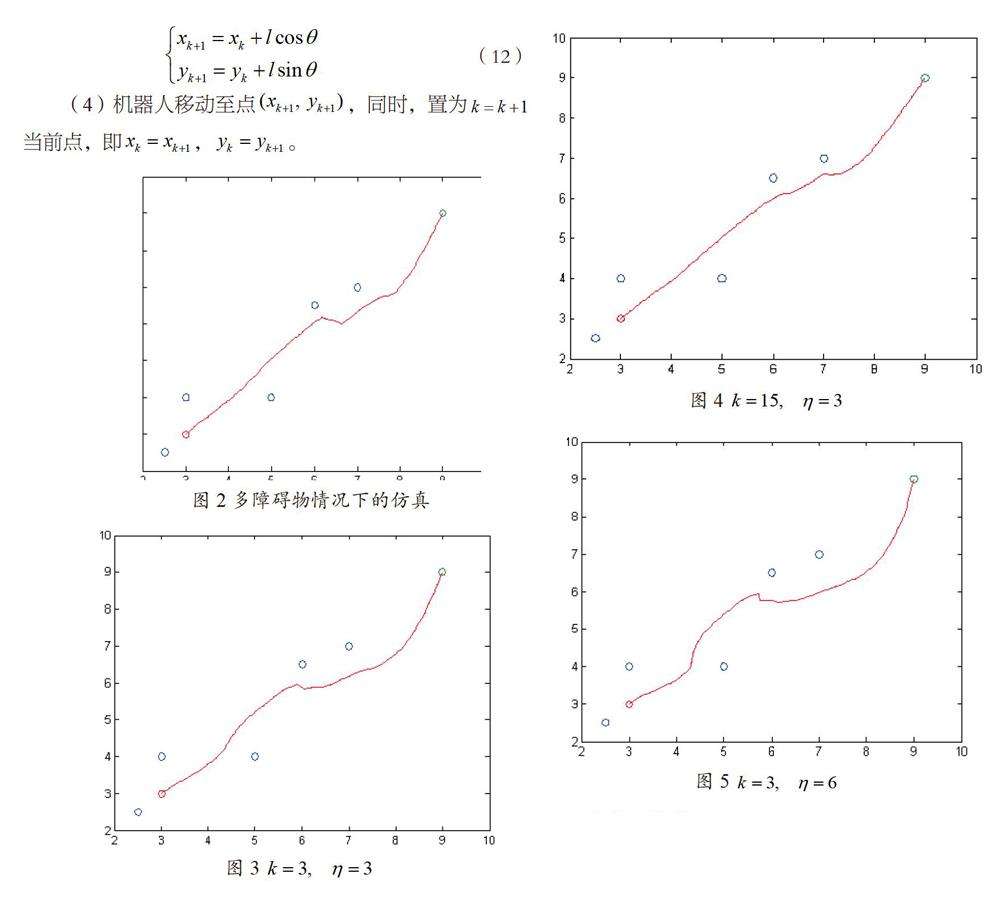
2、不同的引力場和斥力場的正比例增益系數下的仿真
起始點為[3,3],障礙物為[2.5,2.5]、[3,4]、[5,4]、[6,6.5]和[7,7],目標點為[9,9],障礙物影響距離Po為3,移動步長,設為0.2,不同的n和η對仿真結果有不同的影響,具體如圖3~5所示。
3、不同步長下的仿真
起始點為[3,3],障礙物為[2.5,2.5]、[3,4]、[5,4]、[6,6.5]和[7,7],目標點為[9,9],引力場的正比例增益系數k為6,斥力場的正比例增益系數η為3,障礙物影響距離po為3,不同的移動步長對仿真結果有不同的影響,具體如圖6-8所示。
六、結論
對利用傳統人工勢場模型進行移動機器人路徑規劃的缺陷進行了數學分析,由于該缺陷的存在,在特定的環境中會產生不可到達問題。通過對斥力函數的修正,得到了改進的人工勢場模型,實驗表明,運用改進后的勢場模型能夠進行準確的路徑規劃。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:21
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19
中國工程咨詢(2016年4期)2016-02-14 07:28:28
