基于LVQ網絡優(yōu)化的雷達目標識別算法
2019-03-22 05:27:04,,
雷達科學與技術 2019年1期
關鍵詞:優(yōu)化
, ,
(海軍航空大學信息融合研究所, 山東煙臺 264001)
0 引 言
雷達目標一維距離像識別是利用高分辨雷達的目標回波所提供的相關信息,對目標的類別屬性等進行相應的判決。一維距離像能夠反映目標的幾何形狀和結構信息,相較于低分辨率雷達可以提供更多所需的特征信息,而且易獲取和處理。因此利用雷達目標的一維距離像進行目標識別[1-2]成為熱門的方法。已有研究提出了將子空間法、最優(yōu)聚類中心法、BP神經網絡[3-5]等應用于雷達目標一維距離像識別,并取得了不錯的效果。
神經網絡作為一種性能優(yōu)良的分類器,在近些年得到了飛快的發(fā)展。其最大的特點就是具有很強的自適應能力,不但能夠自適應地學習,還能自適應地調整網絡規(guī)模的大小。LVQ神經網絡擁有很強的分類識別能力,得到了廣泛的應用[6]。本文將其作為分類識別器應用到雷達目標的一維距離像識別中,取得了不錯的效果。LVQ網絡算法存在對輸出層和競爭層初始連接權值敏感的問題,針對這個本文采用PSO算法進行優(yōu)化改進,提出PSO-LVQ雷達目標一維距離像識別算法。經實驗驗證,該方法明顯提高了識別效果。
1 LVQ神經網絡模型分析
LVQ神經網絡是一種用于訓練競爭層的有監(jiān)督的網絡,其算法源自于Kohonen競爭算法[7]。圖1為LVQ神經網絡結構示意圖[8]。LVQ神經網絡有3層神經元:輸入層、競爭層和輸出層。設每個距離像為向量Xi,輸入層的每個輸入模式均為一個距離像。該網絡輸入層和競爭層之間采用全連接的方式,其連接權值在進行網絡訓練的時候會發(fā)生改變,網絡訓練就是競爭層對輸入的向量依據距離最近準則進行學習分類。輸出層的每個神經元對應于一種雷達目標類別。
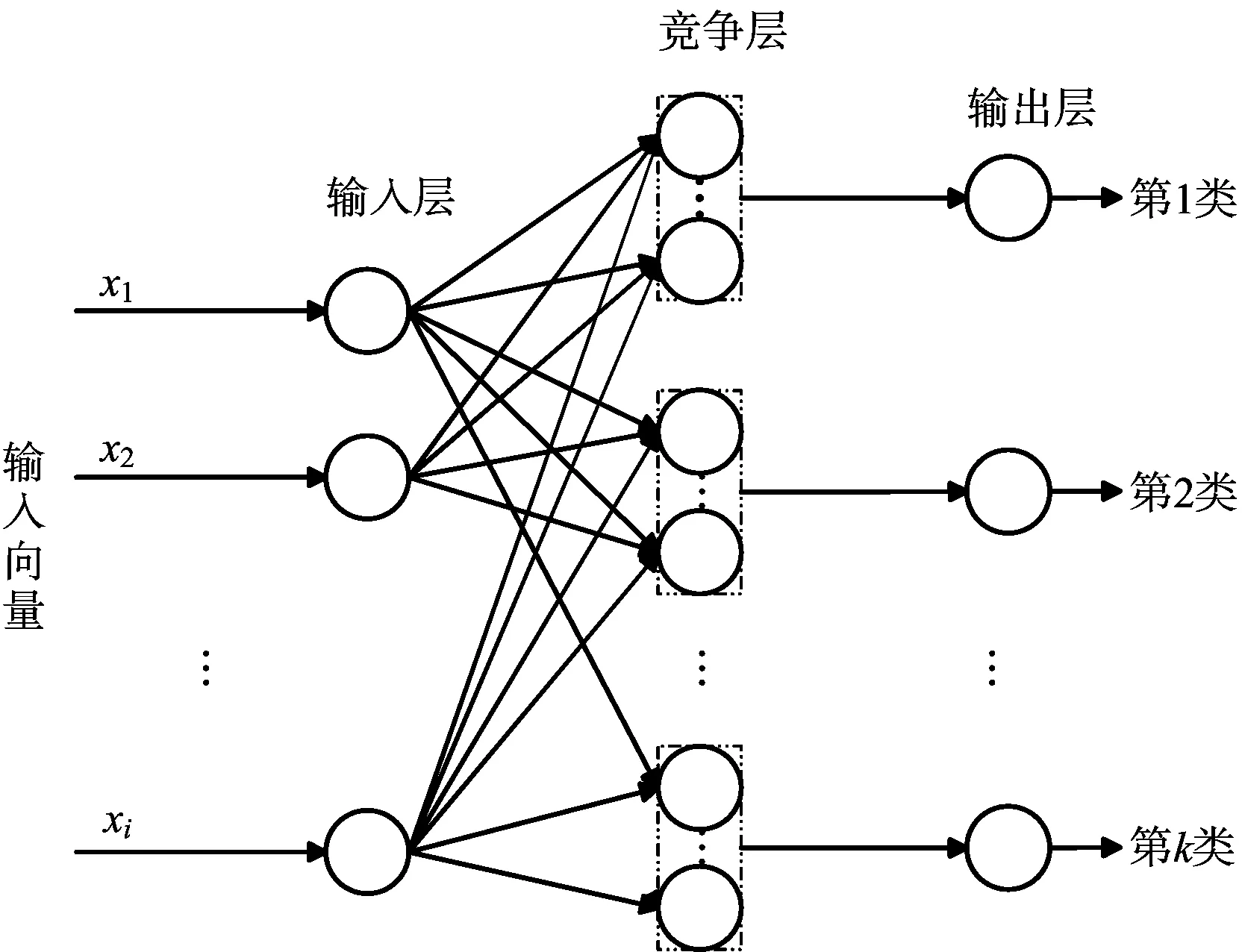
圖1 LVQ神經網絡模型
在利用LVQ神經網絡進行雷達目標一維距離像識別的時候也發(fā)現(xiàn)一些問題。通常“獲勝”的神經元通過計算最小距離來確定,只利用“獲勝”神經元的信息導致輸入樣本和競爭層之間的信息資源利用不充分。容易發(fā)現(xiàn)當初始權值偏差過大的時候,計算誤差就會很大,會影響LVQ網絡的收斂速度和分類識別的效果。
2 PSO-LVQ雷達目標一維距離像識別算法
針對上述提及的LVQ網絡對輸出層和競爭層初始連接權值敏感的問題,本文提出了PSO-LVQ雷達目標一維距離像識別算法。
圖2為基于PSO-LVQ的雷達目標一維距離像識別流程圖,實驗整個過程主要分為數據預處理、生成LVQ網絡、PSO算法優(yōu)化網絡權值、建立模板庫及測試識別判斷幾個部分。
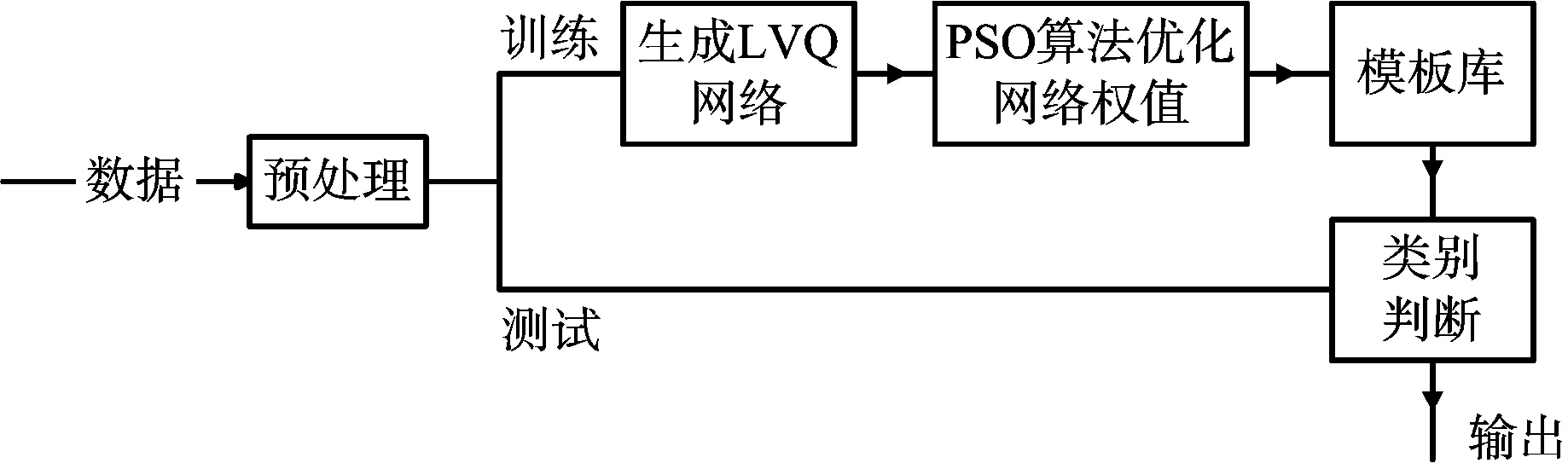
圖2 基于PSO-LVQ的雷達目標一維距離像識別流程圖
2.1 數據預處理
一維距離像存在著方位敏感性和幅度敏感性,它們是一維距離像識別的關鍵問題之一。為了有效地識別目標,必須進行數據的預處理。傅里葉變換(FFT)[9]法在頻域具有平移不變性,對目標的一維距離像作傅里葉變換,在時域里的平移對頻域沒有產生影響,這樣能夠克服雷達目標一維距離像的平移敏感性。對距離像幅度譜進行歸一化解決幅度敏感性[10]。
2.2 PSO算法優(yōu)化網絡權值
粒子群優(yōu)化算法[11]是由Kennedy和Eberhart等提出的模擬鳥的群體智能行為的一種優(yōu)化算法。粒子群算法中,一個粒子代表一只鳥,每個粒子用其自身的位置和速度來表示,并依據自身的初定方向、自己的經驗最優(yōu)方向和周圍粒子的經驗最優(yōu)方向來更新其位置和速度。通過定義適應度函數來評價每個粒子的表現(xiàn)。
本文采用粒子群算法對LVQ神經網絡初始權值進行優(yōu)化選擇。將粒子群的粒子編碼直接賦值給LVQ神經網絡的權值和閾值矩陣,然后通過LVQ神經網絡預測得到預測值,與訓練數據的實際值進行比較,以預測失誤率和為目標函數,得到每個粒子的適應度。圖3為PSO-LVQ神經網絡權值優(yōu)化算法的流程圖。
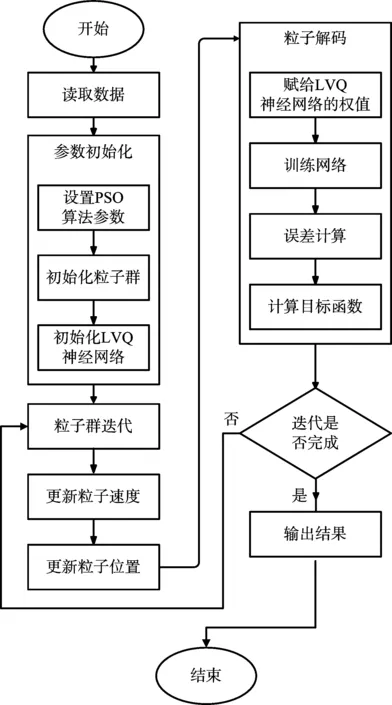
圖3 PSO-LVQ神經網絡權值優(yōu)化算法流程圖
2.2.1 參數初始化
設置PSO算法的參數c1,c2,r1和r2,初始化粒子群,即定義種群規(guī)模、迭代次數等參數,初始化粒子的速度和位置。
創(chuàng)建LVQ神經網絡,每個目標選取一定數量的樣本作為網絡訓練的輸入向量,隨機產生n×m維的矩陣(n為LVQ網絡的隱含層神經元數,m為一維距離像的維度)作為網絡的初始權值。隱含層神經元數會影響網絡的效果,過少會影響識別精度,過多則會影響訓練的速度,依據實際的實驗確定其數目。輸出層每個神經元對應于一種雷達目標類別。種群迭代更新:
粒子的速度計算如式(1)所示:
vij(t+1)=vij(t)+c1r1[yij(t)-xij(t)]+
(1)
粒子的位置計算如式(2)所示:
xij(t+1)=xij(t)+vij(t+1)
(2)

2.2.2 粒子解碼
粒子解碼就是將粒子編碼直接賦值給LVQ神經網絡的權值,并通過LVQ神經網絡預測得到預測值,與實際值比較后,以預測錯誤率和為目標函數, 得到每個粒子的適應度。
設每個距離像為向量Xi,輸入層的每個輸入模式均為一個距離像。假定K類目標共有M個距離像,則輸入為X=(x1,x2,…,xM),則輸入神經元個數也為M,按照如下步驟進行訓練:
第一步 初始化輸入層和競爭層之間的連接權值ωij和學習速率η(0),η>0,其中i=1,2,…,P,P為競爭層神經元數目,j=1,2,…,M;
第二步 將一維距離像作為輸入送入網絡,計算輸入向量與競爭層神經元之間的歐式距離:
(3)
第三步 建立最小歐式距離標準,與輸入向量歐式距離最小的神經元di獲勝,與之連接的輸出層神經元的標簽記為Cx,與輸入向量對應的別類標簽為Ci;
第四步 判斷是否正確分類,依據以下規(guī)則調整權值向量:
當Cx=Ci時,則
wij_new=wij_old+η(x-wij_old)
(4)
當Cx≠Ci時,則
wij_new=wij_old-η(x-wij_old)
(5)
第五步 調整學習速率:
(6)
第六步 判斷迭代次數n是否超過N,若超出則迭代結束,否則轉到第二步。
這種訓練方法的優(yōu)勢在于不需要對輸入向量進行歸一化和正交化,只需計算輸入向量和競爭層神經元之間的距離。
PSO-LVQ優(yōu)化算法的具體實現(xiàn)步驟如下:
1) 創(chuàng)建LVQ網絡;
2) 初始化粒子群,定義種群規(guī)模、迭代次數等參數,初始化粒子的速度和位置;
3) 迭代尋優(yōu),調整粒子的速度和位置;
4) 計算適應度值,更新個體極值和群體極值;
5) 重復3)、4)兩步,直到迭代完成;
6) 將最優(yōu)值賦值給LVQ神經網絡,輸入樣本進行訓練;
7) 輸出結果。
3 實驗仿真
3.1 實驗條件
實驗采用的實測數據是國內某研究所的ISAR實驗飛機數據,實驗飛機有3種,分別為安-26、槳狀和雅克-42。雷達為逆合成孔徑C波段雷達,中心頻率約為5.5 GHz,波長約為0.05 m,信號帶寬為400 MHz,距離分辨率為0.375 m,采樣點數為256。每種飛機記錄了7段數據,每段數據含26 000個寬、窄帶信號(間隔2.5 ms)。寬帶信號為全去斜后的正交雙通道信號(其FFT即為一維距離像),每段數據含260個寬帶正交雙通道信號。實驗數據為3種飛機各取一段的260幅距離像。對數據進行如下處理:
第一步 歸一化,將每一幅圖像用其總能量歸一化;
第二步 距離對準,利用Fourier變換的平移不變性,將一維距離像作Fourier變換即可對齊。
每種目標選取160個樣本組成訓練集,剩余100個樣本組成測試集。設置隱含層神經元數為20個,粒子群種群的規(guī)模為50,迭代次數為50次。
3.2 結果分析
如表1所示為LVQ算法和PSO-LVQ算法的分類準確率。
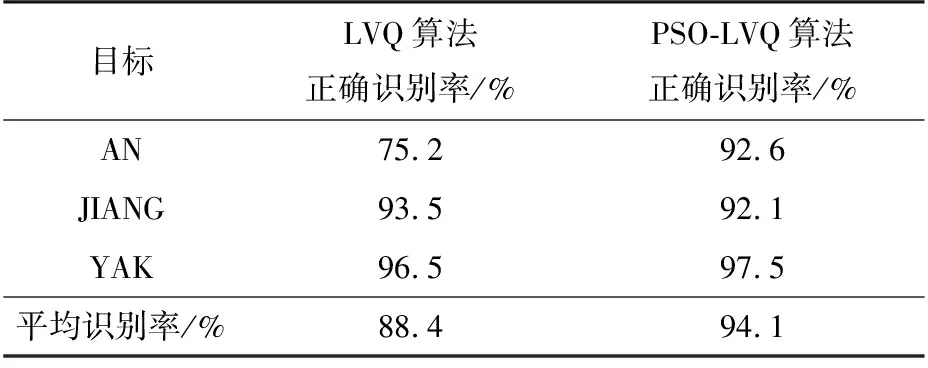
表1 LVQ, PSO-LVQ算法分類準確率比較
通過表1能夠直觀地看到PSO-LVQ算法的分類準確率要比LVQ的好很多,平均準確率可以達到94.1%,這說明經過PSO算法對LVQ神經網絡的權值進行優(yōu)化之后,在一定程度上克服了LVQ神經網絡對于初始權值的敏感性,使網絡的分類效果更好。實驗證明了該算法的正確性。
圖4為PSO-LVQ算法訓練樣本集ROC曲線,ROC曲線下面積越接近1說明分類的效果越好。很明顯能看出,3類目標ROC曲線下面積都將近1,說明在用粒子群算法優(yōu)化LVQ神經網絡的權值之后,分類器的分類效果良好。
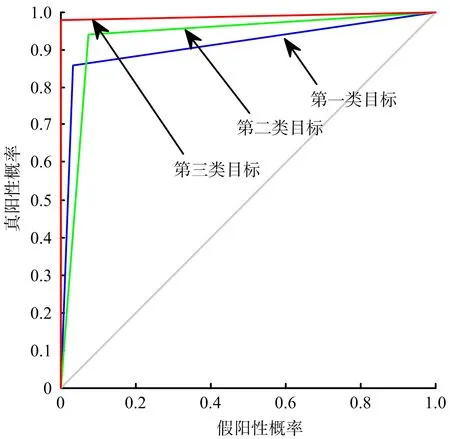
圖4 PSO-LVQ算法訓練樣本集ROC曲線
4 結束語
本文詳細介紹了LVQ神經網絡模型,利用其穩(wěn)定的分類識別能力來進行雷達目標一維距離像的識別,取得一定的識別效果。在此基礎上,針對LVQ神經網絡對初始連接權值敏感性的問題,采用粒子群優(yōu)化算法對其進行優(yōu)化,從而提高網絡的性能和穩(wěn)定性。經過實驗表明,由粒子群權值優(yōu)化后的LVQ神經網絡,在識別性能上有了進一步的提升,從而驗證了PSO優(yōu)化算法在一定程度上能克服LVQ神經網絡對于初始權值的敏感性,增強網絡的性能。需要指出的是,沒有考慮數據的不同信噪比對目標分類識別率的影響,這是接下來要繼續(xù)開展工作的地方。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45