多攝像頭接力跟蹤綜述
2019-04-11 05:21:54吳雨迪
科技與創新 2019年6期
吳雨迪
(廣州市第十六中學,廣東 廣州 510000)
1 引言
計算機視覺技術是指利用攝像頭等輸入設備充當人類眼睛獲取圖像信息,并采取一系列圖像處理算法對輸入圖像進行研究、分析,提取出有用信息并給出反饋的一種技術,是人工智能的一個重要分支。隨著計算機視覺技術的迅猛發展,攝像機已經廣泛應用于人類工作、生活的各個方面,例如視頻監控、人機交互、車牌識別、路標檢測、行人檢測等,尤其是隨著人們對無人駕駛智能車需求的日益增長,基于攝像頭的目標檢測成為了當下研究的熱門方向。伴隨著視頻監控網絡的不斷壯大,單攝像頭目標檢測逐漸被多攝像頭接力目標追蹤檢測所替代。如何利用計算機視覺技術代替人工,實現多個攝像頭之間目標的接力檢測追蹤,已經成為目前視頻檢測中的一個關鍵問題。典型的多攝像頭接力追蹤過程如圖1 所示。
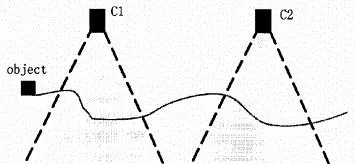
圖1 多攝像頭接力追蹤示意圖
2 多攝像頭目標追蹤檢測的應用價值
2.1 大場景或大范圍內實現可疑目標檢測和連續跟蹤
現如今,隨著時代的發展,公共安全面臨著越來越多的考驗與挑戰。公共環境下的智能監控技術是保障公共場合安全性的一個重要手段和途徑,其關鍵在于如何在大量大攝像頭提取的視頻中找出指定的犯罪嫌疑人,并且對其進行實時、連續接力追蹤。該項技術的發展,可以為公共財產安全或人們的公共生命安全提供保障,同時也能為公安部門的案件審理提供有效的技術支持。
2.2 智能家居中的目標追蹤
隨著數字化、信息化時代的到來,一些智能家居產品逐漸走入人們的生活。由于單個攝像頭的范圍有限,而居住環境相對復雜,所以對多個居室的住宅而言,需要多個攝像頭協同合作,對某個特定用戶進行接力追蹤識別,才能有效地為后續指令動作的讀取奠定基礎,從而可以在不同的房間對某智能家居發布指令,并進行控制。
2.3 智能交通
多攝像頭在智能交通中發揮著巨大的作用,其可以應用在無人車自動駕駛領域,通過不同地點不同攝像頭的協調工作,調度無人車行駛路徑。其也可以應用在肇事車輛的追蹤中,為公安部門破案節省大量財力物力人力。
3 多攝像頭接力跟蹤內容
完整的多攝像頭接力跟蹤包括目標定位、單攝像頭機內追蹤和多攝像頭間交接三個部分。
3.1 目標定位
目標定位是根據目標描述確定目標的位置,是多攝像頭接力跟蹤的初始步驟。在實際應用中,多采用目標檢測算法進行目標初始定位,包括靜態背景下的目標檢測和復雜背景下的目標檢測。
靜態背景下目標檢測多采用差分法、模板匹配法、減除背景法。差分法的理論依據是靜態背景的像素值不會發生變化,所以可以讀取每一幀的像素,根據幀與幀之間像素的差確定背景之中的目標。模板匹配法是提取圖片的某些特征,例如顏色特征、直方圖特征、Haar 特征等,與檢測目標的特征進行匹配,從而檢測出目標。減除背景法則是用當前幀的像素值減去該背景的像素模型,從而定位目標。
復雜背景下的目標檢測包括運動背景下的目標檢測和大場景下目標檢測。運動背景下的目標檢測考慮到攝像頭會隨著時間或物體運動而發生旋轉、平移等變化,拍攝的背景也會隨之而變化。大場景下目標檢測則是需要多個攝像頭對大區域進行拍攝。無論是運動背景下的目標檢測還是大場景下的目標檢測,都需要利用一定的算法對背景進行估計和補償,將一系列拍攝所得的背景圖像拼接為完整的背景,然后再根據每一幀的像素鎖定背景區域,實現目標的定位。
3.2 單攝像頭機內追蹤
一旦目標確定,為了實現在多個攝像頭之間對該目標進行追蹤,首先要實現在單攝像頭內進行穩定準確的目標跟蹤。通常利用運動估計來實現。常用的運動估計算法包括:①遍歷搜索。最經典的遍歷搜索算法是示例學習跟蹤(MIL),該算法預設目標出現在前一幀圖像某臨近區域內的概率相同,在下一幀的檢測中遍歷該區域,從而獲得目標位置。②概率高斯模型。該算法以前一幀圖像目標位置為中心,利用高斯概率密度函數對下一幀的目標進行鎖定。③光流法。光流法是由Gibson 最早提出的,它是根據視頻流中像素強度的時域變化來確定各個像素的‘運動’情況,從而分析出目標的運動。
3.3 多攝像頭間交接
多攝像頭間接力追蹤需要將一個攝像頭內鎖定的目標正確地‘交接’給另一攝像頭。其技術難點在于:①不同攝像頭由于位置、角度、光照等外在因素,或鏡頭色差等內在因素的差異,導致了統一目標在不同攝像頭間的特征參數有所不同。②攝像機只能獲取二維信息,目標時空信息無法獲取。③由于攝像機的差異性,噪聲的來源、種類、特性也各不相同,視頻幀的預處理難度增大。
一般情況下,多攝像頭的交接跟蹤分為有重疊視覺區域的多攝像機目標跟蹤和無重疊視覺區域的多攝像機目標跟蹤。有重疊視覺區域的多攝像機目標跟蹤可以利用不同攝像機內的重疊區域進行標定,其核心思想是建立不同攝像機之間的三維拓撲關系。該方法通過攝像頭獲得其周圍環境信息,通過映射函數將某一攝像機坐標下的目標信息映射到另一攝像機的坐標中。該算法只利用了攝像機間的位置信息,沒有利用目標物體的特征模型,是一種計算復雜度相對較低的方法。
無重疊視覺區域的多攝像機目標跟蹤中存在視覺盲區,難度比有重疊視覺區域的追蹤要大得多。由于攝像機間視野不重疊,多個攝像機的相對位置關系難以確定,無法在視覺交界處進行目標的傳遞。因此,在這種情況下,多采用基于目標特征匹配的算法。例如,可利用顏色直方圖進行目標匹配,或是利用紋理和形狀特征來建立模型,最大化概率關聯融合器(JPDAF)來進行跨越視野的追蹤。不同攝像機所處環境的不同導致了目標特征的選取存在一定困難,容易引起特征提取不準確、不完整。同時,同一目標特征模型的參數在不同攝像機下也不盡相同,進一步加大了多攝像機交接的困難,該類算法的計算復雜度相對較高。
目前,Cai、Chang 等人采取了位置信息與目標特征匹配相結合的算法,該算法綜合了兩者的優點,充分利用了環境監理攝像機的拓撲位置關系,并且提取了目標的特征,最后利用適合的并聯算法對不同攝像機發現的目標進行對應,是一種結尾有效的方法。
4 總結與展望
多攝像機接力追蹤問題經過了幾十年來大量科研人員的不懈努力已經取得了一定的進展。常用方法是將其拆分為目標定位、攝像頭內目標跟蹤和攝像機間交接三個部分。其中目標定位多采用特征提取結合特征匹配的方法,攝像機內目標跟蹤多采用運動估計法,而攝像機間的目標交接則根據有無重疊區域分為基于空間約束拓撲位置關系的算法和基于特征匹配的算法等。目前仍然存在一定的困難,上述各類算法都是以單攝像頭內目標跟蹤為基礎,單攝像頭內的目標追蹤尚存在未能解決的難點,例如攝像頭本身產生的噪聲、清晰度等;物體的復雜性特異性、被樹木或是周圍環境遮擋、物體運動時發生姿態變化等;周圍環境光照變化等。多攝像頭的接力追蹤覆蓋的范圍更為廣闊,攝像機之間的拓撲結構往往比較復雜,它面臨著更多新的問題。
在未來發展中,我們可以考慮用新的更加準確的特征來描述復雜的目標物體,還可以引入機器學習算法如boosting算法,甚至可以考慮引入目前最流行的卷積神經網絡算法來提高目標追蹤的準確性和確定性,未來硬件設備也會進一步發展。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
河南科技(2014年23期)2014-02-27 14:19:15
