阻攔索斷裂對螺旋槳艦載機著艦安全影響數值分析
2019-04-22 10:43:18張聲偉段卓毅耿建中王立波
航空學報 2019年4期
關鍵詞:飛機
張聲偉,段卓毅,耿建中,王立波
航空工業第一飛機設計研究院,西安 710089
起飛與著陸是陸基飛機飛行事故的多發階段,艦載機著艦技術難度遠大于陸基飛機,危險性也更高。國內外關于艦載機著艦技術方面的研究很多,研究內容涉及到艦載機著艦引導技術[1-3]、艦體運動對艦載機安全著艦的影響[4-5]、艦載機起降動力學研究[6-8]、機艦適配性研究[9]、艦載機著艦攔阻技術[10-12]和艦載機飛行品質規范[13]等多個方面。由于是小概率事件,關于阻攔索斷裂對艦載機著艦安全影響研究的文獻很少。但事實表明阻攔索斷裂所導致的艦載機墜海事件并不少見,如俄軍的SU-33、Mig-29K、美軍的F-18等艦載機均發生過此類事故。阻攔索斷裂瞬間釋放的巨大動能會對甲板工作人員造成致命傷害,若事故飛機偏離著艦跑道沖入艦載機群,將引起連環爆炸,造成巨大損失。
2016年3月8日,美軍艾森豪威爾號航母的一架E-2C艦載預警機在著艦滑跑時阻攔索斷裂,該機飛離航母后航跡下沉,經6.3 s爬升至航母甲板高度。相對于噴氣動力艦載機,螺旋槳動力艦載機推重比小,氣動阻力大,不利于加速復飛。為解釋螺旋槳動力艦載機逃逸復飛成功的原因,本文采用仿真技術,數值模擬了螺旋槳艦載機著艦、艦面滑跑與離艦復飛全過程主要運動參數的變化,并深入分析其動力學特性。
本文首先根據艦載機攔阻滑跑、阻攔索斷裂滑跑與空中飛行3個階段的動力學方程,分析其各階段的運動特性,并建立了螺旋槳動力艦載機著艦復飛的仿真模型、攔阻索工作模型、發動機的動力響應模型、舵面操縱模型與螺旋槳動力艦載機著艦構型下的氣動力動力影響修正模型[14]。再基于以上模型,數值模擬了阻攔索斷裂情況下E-2C艦載機逃逸復飛過程,并對其航跡與主要運動參數進行了數值分析,得出其逃逸復飛成功的原因。最后變參數分析了影響螺旋槳動力艦載機復飛安全的敏感因素。
1 艦載機攔阻滑跑與復飛運動特性
阻攔索斷裂情況下艦載機逃逸復飛的運動參數分析可分為攔阻滑跑、斷裂滑跑與空中飛行3個階段。飛機每個階段的動力學方程、發動機工作狀態、操縱指令與運動參數變化均不相同。
1.1 攔阻滑跑階段運動分析
離艦速度是影響艦載機復飛安全的重要參數,其值取決于著艦速度、第I階段的速度損失與第Ⅱ階段的速度增量。第I階段為急劇減速運動,動力學方程為
(1)
式中:ne、Te與φe分別為發動機數量、拉力、拉力與機身軸線夾角;Daer、Dzl與Fz分別為飛機氣動阻力、阻攔索拉力與滑跑摩擦阻力;m、v與α為艦載機著艦質量、飛行速度與迎角。該階段飛機速度損失主要取決于阻攔索斷裂前所吸收的能量,較大的速度損失會影響艦載機復飛安全,因此有必要定量分析艦載機攔阻滑跑階段的受力情況、速度與位置變化情況。
1.2 斷裂滑跑階段運動分析
第Ⅱ階段飛機作加速運動,動力學方程為
(2)
速度增量主要與發動機的動力響應特性、氣動阻力與剩余甲板長度有關。氣動阻力計算需要考慮動力影響、側滑及航向配平帶來的阻力增量,側滑角計算公式為
β=arctan(vcrsinθd/v)
(3)
式中:vcr為航母速度;θd為著艦跑道與航母艦體軸線的夾角。
1.3 空中飛行階段運動分析
艦載機離艦后經歷下沉、拉平與爬升3個階段。飛機質心作非定常曲線加速運動,同時伴隨著機體繞質心軸作俯仰轉動。該階段飛機的迎角、航跡角φ及其角速度ωφ、俯仰姿態角θ及其角速度q快速變化,飛機的動力學方程為
(4)
式中:qv為速壓;S為飛機參考面積;ca為平均氣動弦長;Iy為飛機俯仰慣性矩;CT為拉力系數;CL、CD和Cm分別為升力系數、阻力系數和俯仰力矩系數。
2 仿真模型
真實反映敏感因素對艦載機運動參數的影響,不追求細節一致是仿真模型建立的原則。
2.1 建立系統仿真模型
螺旋槳動力艦載機著艦復飛的運動仿真系統模型見圖1。
圖1表明:螺旋槳動力艦載機著艦復飛仿真系統主要由飛行控制系統模型、動力系統響應模型、阻攔索工作模型、氣動力修正模型與飛機運動方程解算模塊組成。
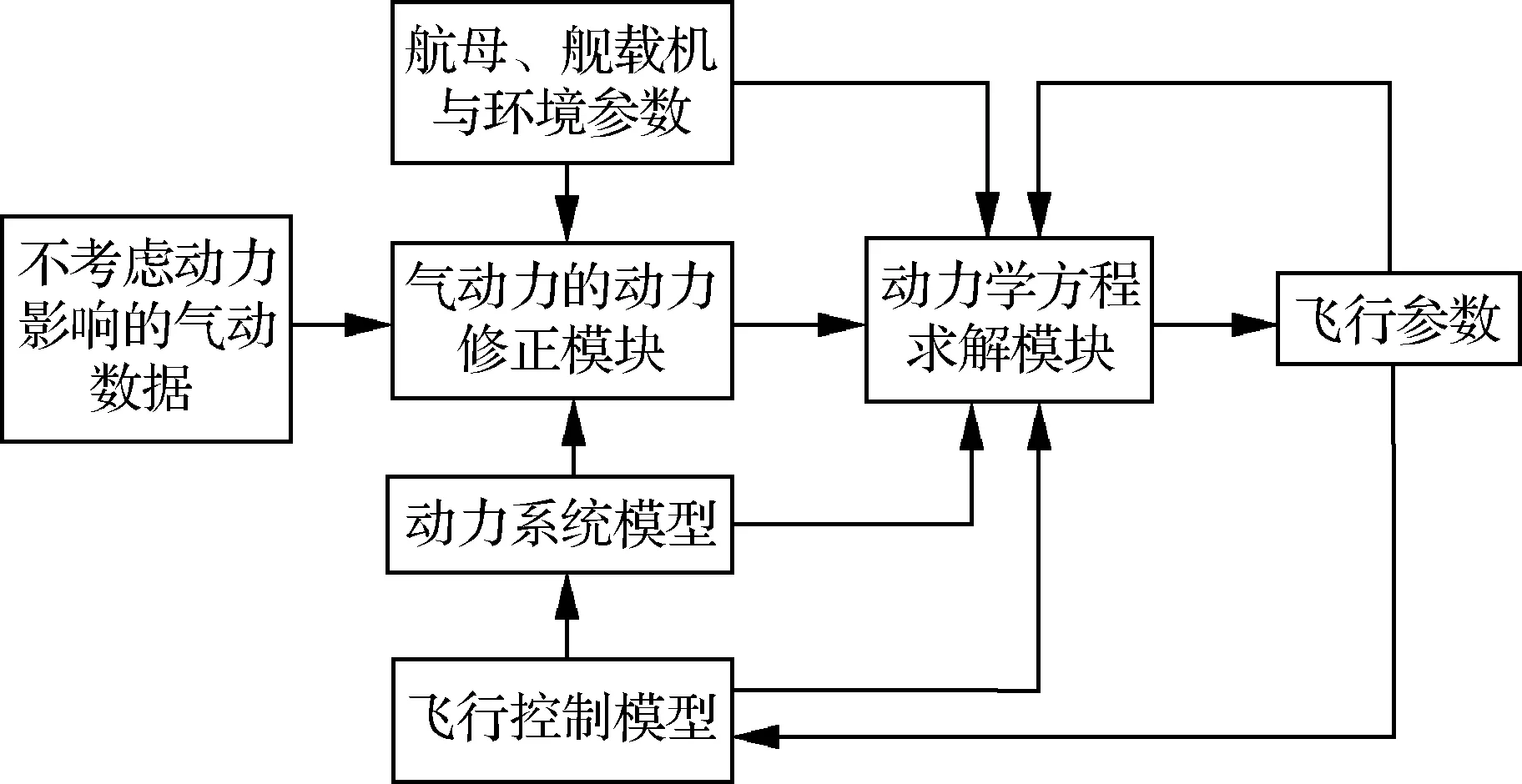
圖1 螺旋槳艦載機著艦復飛仿真模型Fig.1 Simulation model of landing and re-flight of propeller carrier aircraft
2.2 氣動力模型
艦面滑跑階段的氣動力計算公式為
(5)
式中:CLoff、CDoff與Cmoff分別為艦載機無動力狀態下的升力、阻力與俯仰力矩系數;CLT、CDT與CmT分別為螺旋槳拉力產生的的升力、阻力與俯仰力矩系數增量;CLN、CDN與CmN分別為螺旋槳法向力產生的的升力、阻力與俯仰力矩系數增量;CLs、CDs與Cms分別為螺旋槳滑流產生的的升力、阻力與俯仰力矩系數增量。
空中飛行階段的氣動力計算公式為
(6)
2.3 阻攔索工作模型
本文阻攔索受力的數學模型為
(7)
式中:E為艦載機著艦時的總能量;s為水平位移;smax為艦載機攔阻滑跑距離;η為阻攔裝置的機械效率;f為摩擦力系數;p1為主液壓缸活塞上的壓力;A2為活塞等效面積,攔阻系統的液壓緩沖裝置比較復雜,其詳細信息可參見文獻[15-17]。
該模型不同于彎折波模型,其重點關注攔阻索受力與飛機位移的函數關系,而不是拉力的波動情況。
阻攔索強度損失的不確定性使艦載機攔阻滑跑的動能損失具有隨機性,為模擬這種隨機性,本文采用斷裂系數(阻攔鎖斷裂時所受張力/阻攔索載荷峰值)用于仿真計算艦載機的動能損失。
2.4 油門操縱及其響應模型
艦載機著艦瞬間,飛行員將油門桿推到最大位置,若成功掛索,會將油門收到慢車位置,否則將繼續保持最大油門,發動機拉力會持續增加。據美軍標MIL-F-8785C要求,設發動機油門響應時間為2.5 s,飛行員操縱反應時間為0.3 s。發動機油門響應曲線參考相似渦槳發動機。
2.5 升降舵操縱約束
艦載機飛離甲板時,飛行員感覺到飛機下沉后開始拉桿,其反應時間設為0.3 s。升降舵操縱模型參見艦載機設計標準[18]對起飛過程中飛機運動參數的約束為:
1) 迎角不得大于90%CLmax所對應的迎角。
2) 航跡最低點的加速度不得小于0.07g。
3) 飛機的俯仰姿態角速度不得大于12 (°)/s。
根據以上約束,艦載機第Ⅲ階段升降舵的控制律設計思想為:保證飛機迎角不大于12.8°,俯仰角速度不大于12 (°)/s。飛機縱向加速度不小于0.686 m/s2。
2.6 運動參數計算模型
1) 艦面滑跑階段速度與時間計算模型:
(8)
式中:Δv為飛機速度損失量;vland、ve分別為該階段的起始速度與終點速度;sz與tz分別為該階段的滑跑距離與滑跑時間。
2) 離艦飛行階段運動參數計算模型:
(9)
式中:Δh為飛機航跡相對于甲板的下沉量;s3z為水平飛行距離;t3z為空中飛行段的時間。
3 仿真計算與數據分析
數值模擬的對象為E-2C艦載機在艾森豪威爾號航母著艦逃逸復飛過程,目的在于揭示螺旋槳艦載機復飛軌跡、運動參數與其動力學特性。
3.1 仿真計算輸入數據
艾森豪威爾號航母的幾何參數:著艦跑道長度為238 m,與艦體軸線的夾角為8.5°。第1道阻攔索距艦尾50 m,每道阻攔索的間距為12 m,甲板距海平面高度為19.8 m。飛機著艦時航母運動速度取27 km/h,阻攔索斷裂系數取0.86。

對象飛機的氣動力計算采用模擬動力影響的CFD數值計算方法。E-2C構型數據來源于文獻[19],建立的數字模型與真實飛機會有一定差別,但這種差別不會產生大的氣動特性變化。
3.2 仿真計算
仿真數據顯示:對象飛機甲板上滑跑的時間為3.8 s;飛離航母至爬升到航母甲板高度所用時間為6.2 s。對象飛機著艦復飛3個階段的末端速度vend、水平位移量sx與所用時間見表1。
對象飛機第Ⅲ階段的航跡下沉量與速度的變化曲線見圖2。仿真計算顯示:對象飛機空中段的初始速度為42 m/s,略小于其失速速度,但升降舵效率并未明顯下降。飛機飛離甲板3.4 s,航跡達到最低點,航跡最大下沉量為10.2 m。飛機離艦6.2 s時爬升至甲板高度,速度增大到53.1 m/s。
視頻顯示E-2C著艦復飛的過程為:飛機于13∶55∶6攔阻鉤掛索,在著艦跑道上滑跑3.9 s之后飛離航母,6.3 s后爬升至甲板高度。仿真數據與視頻顯示的時間比較吻合。
表1對象飛機著艦逃逸復飛3個階段的運動參數
Table1Dynamicparametersofthreestagesoflandingandescapere-flightofobjectaircraft

StageTime/ssx/mvend /(m·s-1)Ⅰ1.360.837.4Ⅱ2.592.242Ⅲ6.2303.953.1
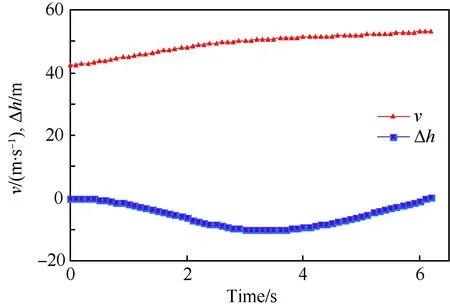
圖2 飛機速度與航跡下沉量隨時間變化Fig.2 Variation of aircraft’s velocity and track sinking value with time
3.3 仿真數據
對飛機各階段主要運動參數變化與受力情況的分析,可得到對象飛機復飛成功的原因。
3.3.1 艦上滑跑階段
仿真計算顯示:第Ⅰ階段艦載機速度從53.3 m/s急劇減小到37.1 m/s,加速度由0.6 m/s2迅速變化為-34.1 m/s2,艦上滑跑距離為60.8 m。第Ⅱ階段平緩加速,離艦時速度增加到42.1 m/s,加速度增大到2.56 m/s2。該階段艦載機的速度損失量為21.1%,速度與加速度變化見圖3,阻攔索拉力變化見圖4。
圖4表明:掛索成功后,阻攔索拉力急速增大,經1.3 s達到其可承受最大拉力778 kN后斷裂,阻攔索的拉力隨時間非線性變化。圖4曲線變化形態與美國軍用標準MIL-STD-2066所示曲線相似。美軍航母所用的MARK7-mod3阻攔系統最大行程94.5 m,阻攔索載荷峰值為911 kN,出現位置在最大攔阻行程的0.59~0.61處。
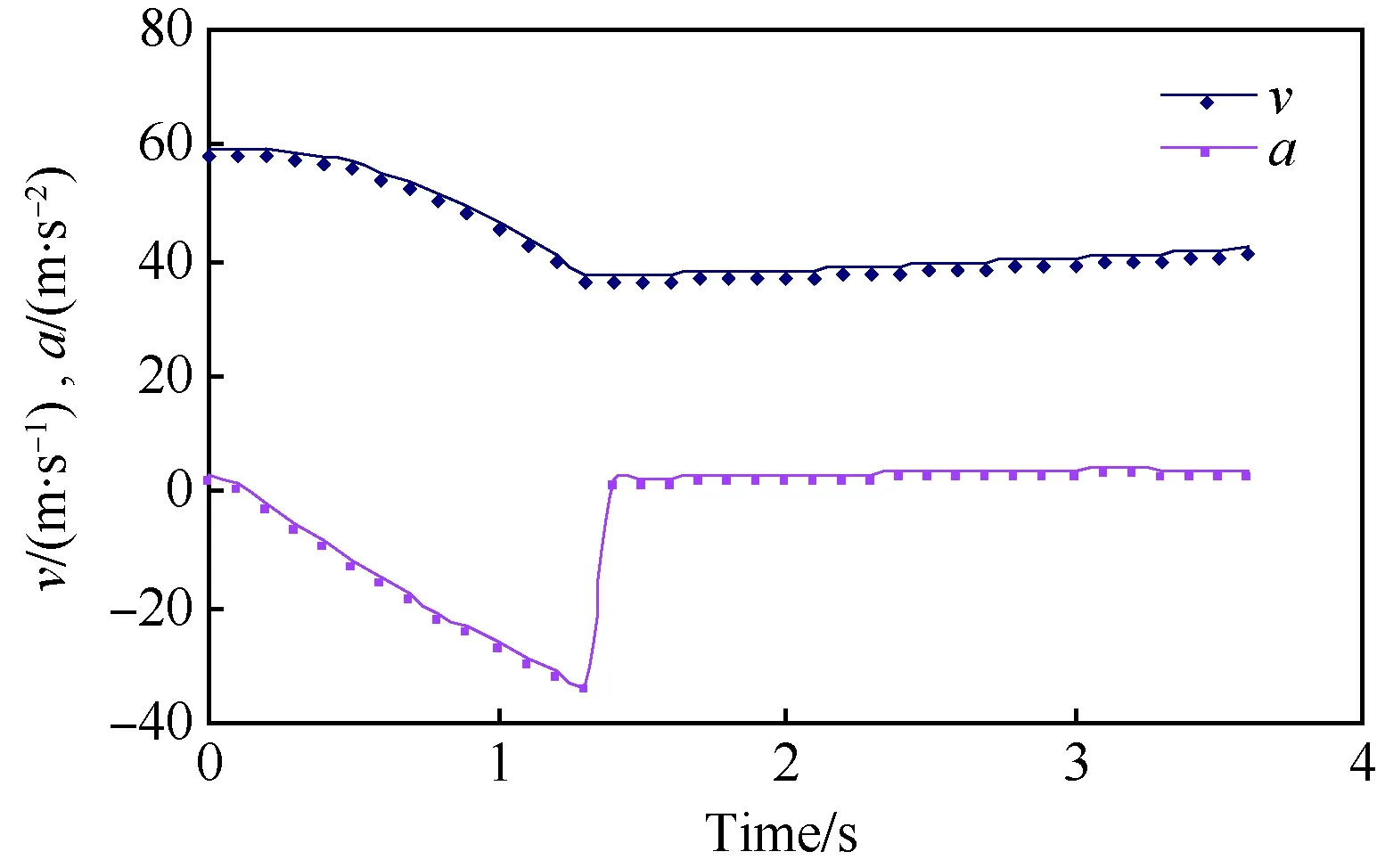
圖3 前2個階段飛機速度與加速度隨時間變化Fig.3 Variation of v and a with time in the first two stages

圖4 阻攔索拉力隨時間變化Fig.4 Variation of drag of block cable with time
3.3.2 離艦飛行階段
評判艦載機復飛安全的直接參數為航跡下沉量,減小航跡下沉量最直接的措施是增大艦載機航跡角速度。航跡角是俯仰姿態角與迎角之差,提高艦載機的俯仰操縱效能,增大俯仰角加速度是快速改變艦載機飛行航跡的關鍵措施。
分析艦載機航跡角的變化,必須考慮飛機俯仰姿態角與迎角的變化。對象飛機第Ⅲ階段的航跡角、俯仰姿態角、迎角與升降舵偏轉角變化曲線見圖5,航跡角速度、俯仰角速度、迎角變化率與升降舵偏轉角變化曲線見圖6。
圖5和圖6顯示:對象飛機離艦2.3 s時俯仰姿態角速度達到最大值9.1(°)/s, 3.0 s時迎角達到最大值12.5°,迎角與俯仰角速度最大值均符合設計標準的要求。飛機離艦3.5 s時航跡角由負值變為正值,航跡由下沉改為爬升。由于飛機的慣性與氣動阻尼所致,對象飛機俯仰姿態角、航跡角與迎角的變化滯后于升降舵偏角的變化。
由第Ⅲ階段艦載機的動力學方程可知,艦載機俯仰姿態角與航跡角的變化主要取決于其靜態俯仰力矩特性,氣動阻尼特性、升降舵操縱效率與俯仰慣性矩。對象飛機的靜態俯仰力矩系數Cmwz、氣動阻尼產生的俯仰力矩系數Cmzn、飛機動態俯仰力矩系數Cmz與升降舵偏轉產生的俯仰力矩系數Cmδe變化見圖7。
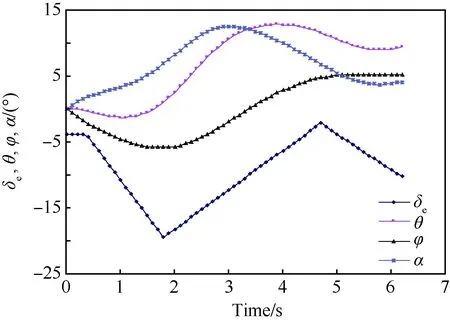
圖5 舵偏角、俯仰角、航跡角與迎角隨時間變化Fig.5 Variation of δe,θ,φ and α with time
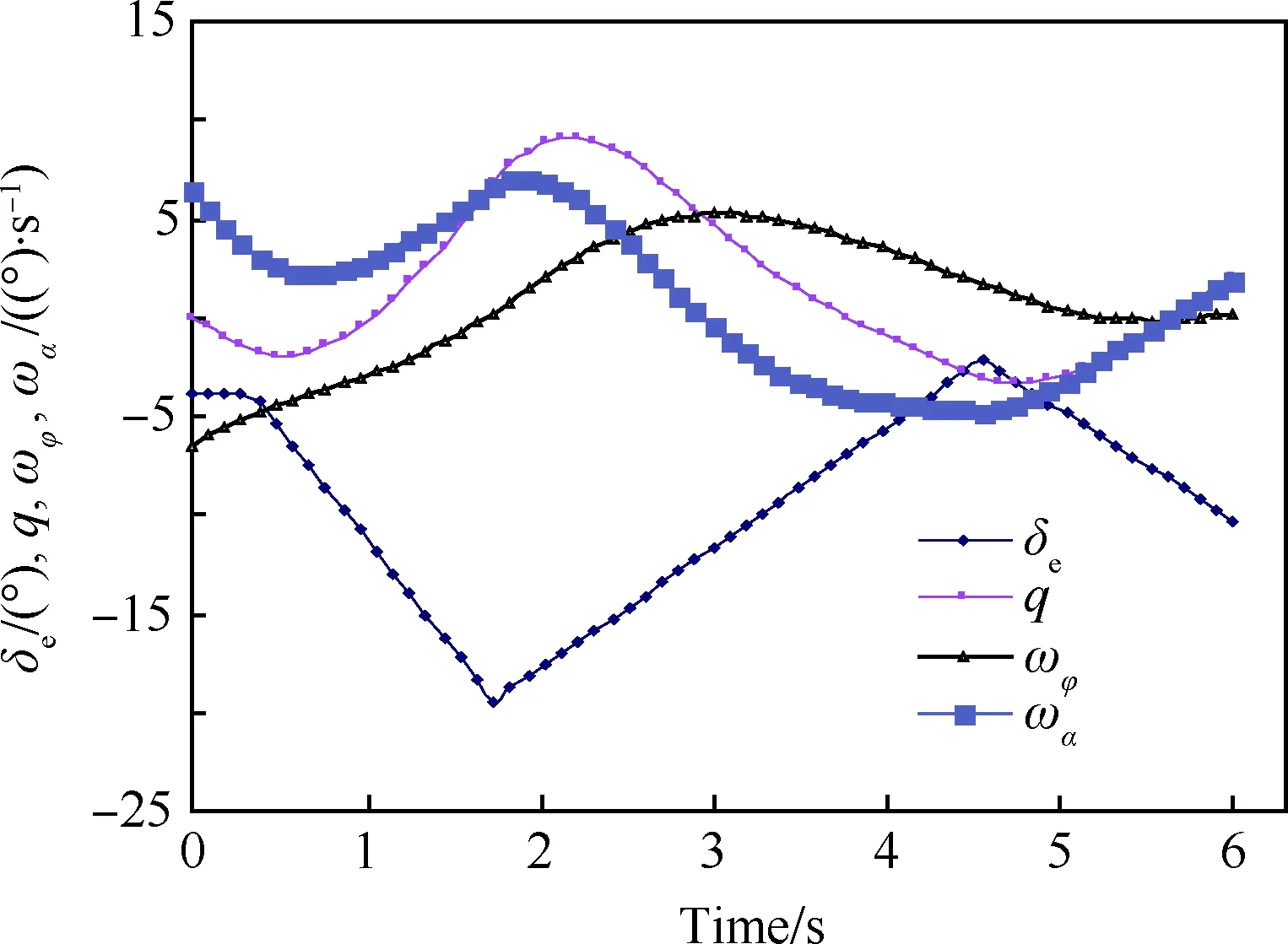
圖6 舵偏角、俯仰角速度、航跡角速度與迎角變化率隨時間變化Fig.6 Variation of δe,q,ωφ and ωα with time
圖7中曲線說明對象飛機的靜態俯仰力矩系數在-0.1~-0.2之間變化,下俯力矩較小。由于升降舵的快速偏轉,由飛機俯仰角速度與洗流時差效應所產生的氣動阻尼力矩系數較大,且變化劇烈。對象飛機的動態俯仰力矩系數大部分時間在-0.07~0.06之間變化。升降舵最大偏角產生的上仰操縱力矩系數為0.35,大部分時間內可提供較大的上仰力矩。對象飛機俯仰力矩特性與升降舵操縱性能,為迅速改變飛機航跡提供了足夠的上仰驅動力矩。
離艦速度的減小會明顯降低噴氣動力艦載機的升降舵操縱效率。螺旋槳動力飛機的滑流一方面會改善飛機失速特性并減小其縱向靜穩定性,另一方面使平尾處速壓增大,提升升降舵的操縱效率。螺旋槳動力艦載機可保證小速度下其升降舵的操縱效率不會明顯下降。
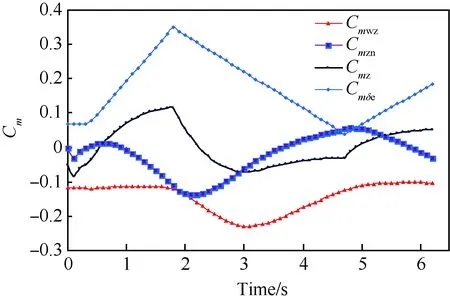
圖7 飛機俯仰力矩與操縱力矩系數隨時間變化Fig.7 Variation of aircraft’s Cmwz, Cmzn, Cmz and Cmδe with time
4 敏感因素分析
理論分析表明:艦載機的氣動特性、動力特性、離艦速度與飛行員的操縱技術均會對艦載機航跡改變產生較大影響。但各因素對航跡下沉量的影響與敏感性需通過仿真計算獲得。
4.1 氣動特性影響
動力對螺旋槳飛機氣動特性影響的仿真計算比較復雜,相關方法可參見文獻[20]。仿真計算表明:螺旋槳動力艦載機著艦構型的氣動特性受動力影響明顯,其中動力對升力與俯仰力矩特性的影響最為顯著。圖8~圖10為對象飛機著艦構型無動力狀態與不同拉力系數狀態下的升力系數、阻力系數與俯仰力矩系數曲線的對比。
對象飛機的縱向氣動特征參數對比見表2。表中數據顯示螺旋槳的動力增升效應明顯:對象飛機在拉力系數為0.4時的最大升力系數CLmax與升力線斜率CLα分別比無動力狀態下增加了39%與29.7%。螺旋槳艦載機一般為低速運輸機或預警機,低翼載與大展弦比直機翼氣動布局使飛機具有良好的升力特性與較小的失速速度。動力增升效應進一步提高了飛機的升力線斜率與最大升力系數。飛機航跡改變的速率直接取決于升力的增量與增速,螺旋槳艦載機著艦構型的升力線斜率約為小展弦比艦載戰斗機的2.6倍,因此其航跡改變能力遠高于噴氣動力戰斗機。
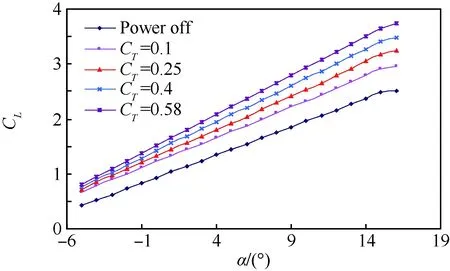
圖8 螺旋槳動力對升力系數的影響Fig.8 Effect of propeller power on CL
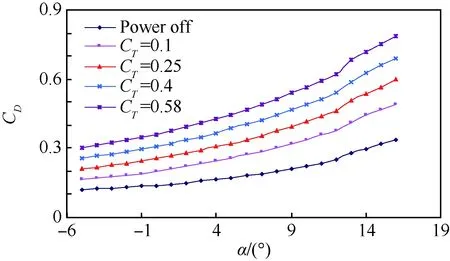
圖9 螺旋槳動力對阻力系數的影響Fig.9 Effect of propeller power on CD
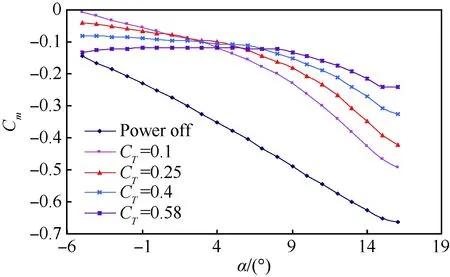
圖10 螺旋槳動力對俯仰力矩系數的影響Fig.10 Effect of propeller power on Cm
表2 對象飛機的氣動特征參數Table 2 Aerodynamics parameter of objects aircraft

CTCLαCLmaxCD0CMα0CmCLOff0.1012.50.1211-0.252-0.250.10.1192.950.2112-0.067-0.1440.250.123.230.1955-0.072-0.0850.40.1313.480.2582-0.091-0.0360.580.1413.730.2582-0.118-0.003
動力對螺旋槳艦載機俯仰力矩特性的影響最為顯著,對改變飛機航跡的影響也最直接。受動力影響的對象飛機俯仰力矩曲線整體上移,拉力系數為0.4時0°迎角的俯仰力矩系數Cmα0與縱向靜穩定性CmCL僅為無動力狀態的35.7%與14.4%(-1°~8°迎角區間)。螺旋槳飛機氣動特性的動力影響來源于槳盤法向力、螺旋槳滑流與拉力。與外吹式襟翼動力增升技術[21]不同,噴氣式襟翼會使飛機的下俯力矩增加,而螺旋槳的法向力與滑流對平尾的下洗作用會顯著增大飛機的上仰力矩,并減小飛機的縱向靜穩定性,可顯著改善飛機操縱的敏捷性。
動力影響也有不利的一面,對象飛機在拉力系數為0.4時零升阻力系數CD0達到了0.258 2,比無動力狀態增大了113%,不利于飛機加速。
為說明氣動特性變化對螺旋槳艦載機逃逸復飛航跡下沉的影響,本文采用對象飛機無動力狀態下的氣動力數據進行了仿真計算。帶動力與無動力2種狀態下對象飛機的航跡下沉量與俯仰姿態角速度曲線見圖11與圖12。
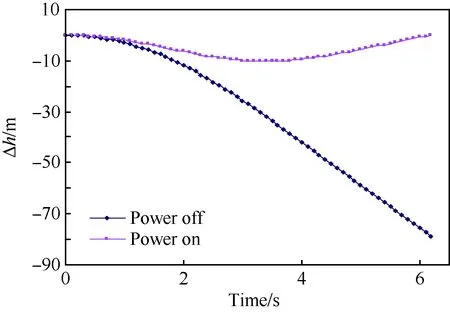
圖11 2套氣動數據模擬的航跡下沉量對比Fig.11 Comparison of values of Δh between two sets of aerodynamic data simulation

圖12 2套氣動數據模擬的俯仰姿態角速度對比Fig.12 Comparison of values of q of two sets of aerodynamic data simulation
圖11和圖12表明:未經動力修正狀態下飛機的最大俯仰角速度只能達到2.1 (°)/s,遠小于動力修正狀態的9.1 (°)/s,舵面操縱能力太差,因此無動力狀態下飛機航跡角負值一直在增大,離艦6.2 s后其航跡下沉量達到81 m。
4.2 離艦速度影響
離艦速度取決于艦載機著艦速度與阻攔索斷裂系數。算例中著艦速度為1.25Vs,阻攔索斷裂系數取0.86,離艦速度計算值為0.99Vs。當斷裂系數系數取0.93或著艦速度減小至1.2Vs,離艦速度計算值為0.91Vs。2個離艦速度艦載機的航跡下沉量變化曲線見圖13。

圖13 不同離艦速度的航跡下沉量對比Fig.13 Comparisons of track sinking value at different approach velocities
圖13顯示:0.91Vs離艦速度,對象飛機的航跡下沉量增大到15.2 m,爬升到甲板高度的時間增大到9.4 s,分別比0.99Vs離艦速度的航跡下沉量與爬升時間增大50%與52%。
4.3 操縱指令影響
推拉桿的轉換時間與操縱速率對艦載機復飛的運動參數產生較大的影響。圖14為bz、lv與hv這3種操縱方式對應的升降舵偏角變化曲線。bz為仿真計算所使用的升降舵操縱方式。lv方式相對bz方式將推桿速度減小46%。hv方式相對bz方式,推桿與拉桿速度均增大25%。
bz操縱方式:對象飛機離艦之后,飛行員以13 (°)/s的速度快速拉桿,迅速改變飛機的姿態角。當升降舵偏角達到最大值,以7.2 (°)/s的速度推桿,防止飛機迎角與姿態角速度超過設計標準的約束值。當迎角反饋值小于7°,再以6.8 (°)/s的速度拉桿,增大升降舵偏角,以防止飛機迎角過小所導致的機翼氣流分離。
對象飛機3種操縱方式的航跡下沉量、迎角與俯仰角速度變化曲線見圖15~圖17。
圖15~圖17曲線顯示:lv操縱方式由于升降舵偏角長時間處于大偏角,致使迎角超過對象飛機的最大使用值。hv操縱方式操縱速率增大,需經多次調整升降舵偏轉方向,方可保證艦載機迎角與俯仰角速度不超出約束值,航跡下沉量相對bz方式減小0.71 m,但爬升時間增加了26%。
通過優化操縱策略,可減小艦載機的航跡下沉量,并保證逃逸復飛操縱的安全。
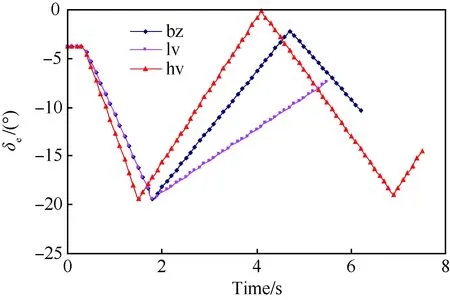
圖14 3種操縱方式升降舵偏角-時間曲線對比Fig.14 Comparison of curves of δe and time in three models

圖15 3種操縱方式航跡下沉量-時間曲線對比Fig.15 Comparison of curves of track sinking value and time in three models
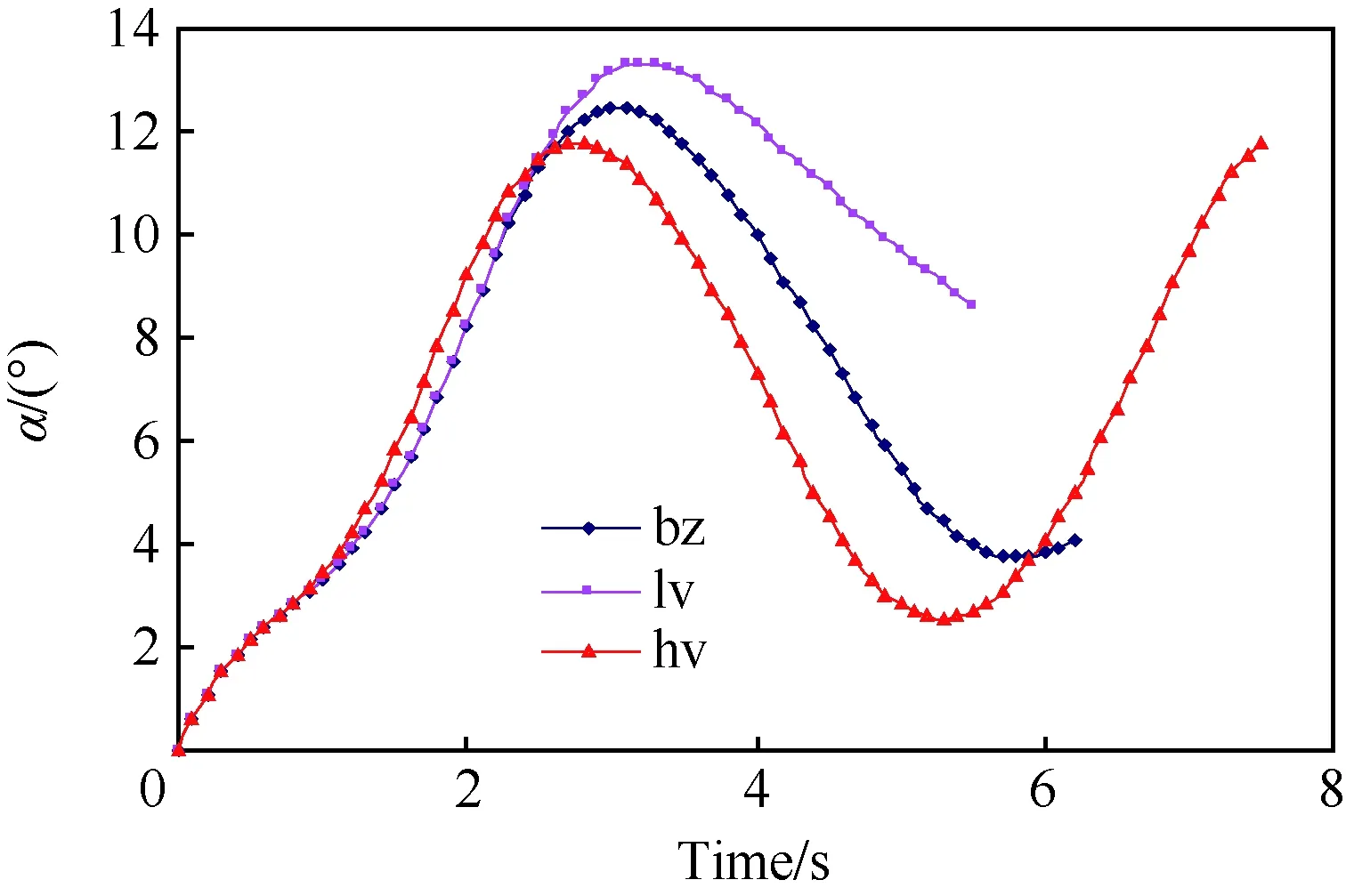
圖16 3種操縱方式迎角-時間曲線對比Fig.16 Comparison of curves of α and time in three models
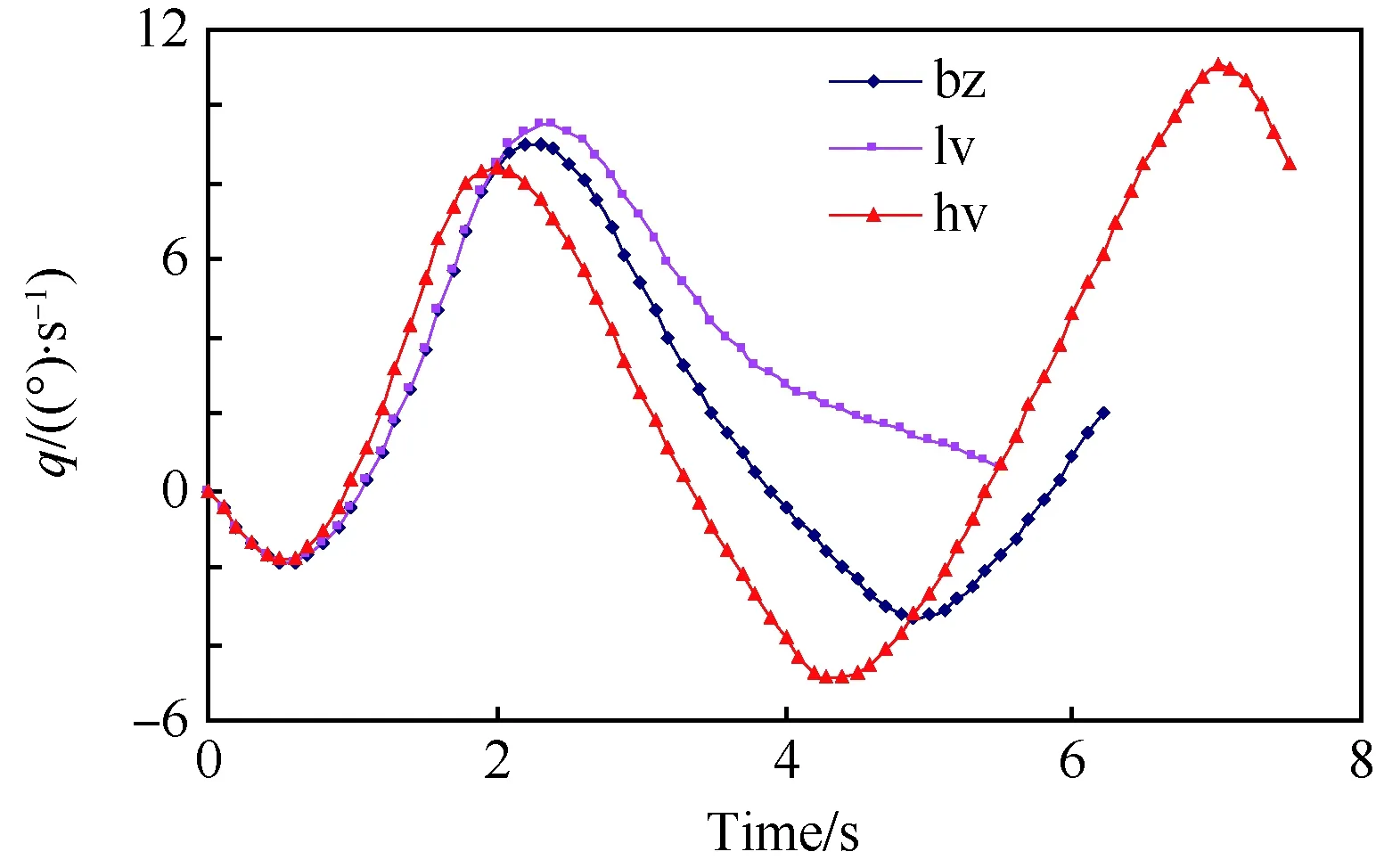
圖17 3種操縱方式俯仰角速度-時間曲線對比Fig.17 Comparison of curves of q and time in three models
5 結 論
1) 螺旋槳艦載機動力影響產生的氣動特性變化,有利于快速改變飛機航跡角,是影響其復飛安全的關鍵因素。
2) 螺旋槳滑流對平尾的下洗與槳盤法向力使飛機俯仰力矩曲線顯著上移,8°迎角以下的縱向靜穩定度減小85%,大大提高了飛機操縱的敏捷性。
3) 螺旋槳飛機特有的動力增升效應,使對象飛機的升力線斜率增大29.7%,最大升力系數增大39%,提升了升力對航跡角改變的貢獻,并改善了失速特性。
4) 螺旋槳滑流增大了平尾處的速壓與下洗,一方面保證了升降舵小速度下的操縱效率,另一方面提供了額外的上仰力矩。
5) 螺旋槳動力艦載機低翼載、大展弦比直機翼氣動布局,具有良好的升力特性與較小的失速速度,是安全復飛的基礎。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33