磁流變半主動懸掛引入位置閾值的改進Bang-Bang控制
2019-04-23 08:47:48張耀輝張進秋孫宜權
噪聲與振動控制 2019年2期
關鍵詞:舒適性
張耀輝,彭 虎,張進秋,孫宜權,張 建
(1.陸軍裝甲兵學院 裝備保障與再制造系,北京100072;2.陸軍裝甲兵學院 車輛工程系,北京100072)
車輛懸掛系統用以支撐車體,緩和路面不平度激勵,起到隔振的作用,其性能對車輛的乘坐舒適性、行駛安全性及操縱穩定性等具有重要影響。半主動懸掛是一類可通過調節執行器的阻尼,可實現以耗散懸掛振動能量為目的的可控懸掛[1]。其中,磁流變半主動懸掛通過改變線圈產生的磁場強度,調節懸掛阻尼,具有響應迅速、易于控制、可靠性好等優點,是一種較為理想的半主動控制執行器,而設計相應的半主動控制算法是提高磁流變半主動懸掛控制性能的關鍵之一[2]。
隨著控制理論的發展,目前,車輛懸掛控制算法主要分為以下4類:
(1)基于車輛狀態信息判定的控制算法,主要包括天棚控制、Bang-Bang控制等[3-4];
(2)基于經典控制理論的控制算法,主要代表為PID控制[5];
(3) 基于現代最優控制理論的控制算法,包括LQR、滑模控制及自抗擾控制等[6–8];
(4)無需精確模型的智能控制算法,主要包括模糊控制及神經網絡控制等[9–10]。
其中,第一類控制算法計算量小,意義明確,通過采集車輛狀態信息進行相應的反饋控制,即可實現對車輛懸掛的控制。簡單的Bang-Bang控制算法以判定被控對象位移和速度的方向作為控制依據,當目標偏離平衡位置時,施加大阻尼力以減小偏離的趨勢;趨向平衡位置時,施加小阻尼,以減小回歸平衡位置時對其的阻礙。該算法的缺點在于會使被控對象在過平衡位置時穿越速度過大,易出現往復振蕩現象,影響懸掛性能。
為解決Bang-Bang控制算法使對象在穿越平衡位置時的穿越速度過大的問題,以車身為對象,以車身垂直速度及垂直加速度為輸入判定依據,提出一種減小車身過平衡位置時的穿越速度的改進Bang-Bang控制算法。建立相應的綜合性能評價指標,分析算法原理及取值方法,并對改進型Bang-Bang 控制算法的控制性能進行仿真及試驗驗證,探討其對乘坐舒適性、行駛安全性及操縱穩定性等懸掛性能指標的影響。
1 懸掛模型及評價指標的建立
1.1 懸掛動力學模型
假設某獨立懸掛車輛質量分配系數為1,建立被動懸掛及裝有MRD的1/4車2自由度懸掛動力學模型如圖1所示。
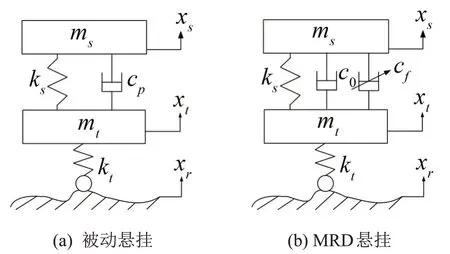
圖1 1/4車2自由度懸掛動力學模型
根據牛頓第二定律,運動微分方程為

式中:ms為車身質量;mt為車輪質量;cp為被動懸掛阻尼系數;c0為MRD黏滯阻尼系數;Ff為MRD庫侖阻尼力;ks為懸掛等效剛度;kt為車輪等效剛度;xs為車身垂直位移;xt為車輪垂直位移;xr為路面激勵垂直位移,以垂直向上為正。
1.2 評價指標
1.2.1 單一指標統計方法
在考察車輛乘坐舒適性方面,ISO2631-1:1997(E)標準給出了車身垂直加速度均方根值與人體舒適性主觀評價之間的對應關系[11]。考慮到1 Hz~80 Hz 振動頻率范圍內,人體對振動反應的界限不同,定義加速度均方根值與人體舒適性主觀評價間的對應關系,如表1所示。

表1 振動量級與主觀評價的關系
表1 中有部分重疊的值,為對乘坐舒適性進行較為準確的判斷,分別以<0.315 m/s2、0.315 m/s2~0.63 m/s2、0.63 m/s2~1 m/s2、1 m/s2~1.6 m/s2、1.6 m/s2~2 m/s2和>2 m/s2作為主觀評價的界定。該表并未涉及車身垂直位移與乘坐舒適性的對應關系,但位移是與加速度相關聯的量,因此,可以利用位移與加速度的對應關系,結合表1,建立車身垂直位移與人體舒適性主觀評價間的等價關系。
將式(1)中的c0換成cp,并令Ff=0,對其進行Laplace 變換,可得到4 個指標相對于路面輸入速度的幅頻特性分別為

式中:γ=kt/ks為剛度比;μ=ms/mt為質量比;λ=ω/ωs為頻率比為阻尼比;Δ=((1-λ2)(1+γ-λ2/μ)-1)2+4λ2ζ2(γ-(1+1/μ)λ2)2。
分別將式(2)至式(5)表示成速度功率譜形式。由于性能指標的振動響應量均值為零,故性能指標的方差即為均方值。確定了路面不平度系數Gxr(n0)和車速v,即可統計各指標均方根值。從頻域角度統計各指標均方根值,通用表達式為

式中:X 可分別表示ACC、DXC、DZH 及DIS。利用式(6)可求取不同路面等級及車速工況下各指標的均方根值。
1.2.2 綜合性能評價指標
單一的性能指標僅從某一方面對懸掛性能進行評價,難以反映懸掛的綜合性能,需要建立懸掛綜合性能指標,以J 表示。以同等條件下的被動懸掛為參考,假設變量為xi(i=1,2,…,N),其中N 為等份數,每一次計算時的xi均對應、fd(i)及D(i),設被動懸掛指標為、fd_p(i)及Dp(i),則可得ACC性能指標JACC為

JDXC與JDZH與JACC的計算方法一致。每個性能指標對應不同的行駛性能,由于不同的車輛及駕駛工況對各個指標的側重有所不同,因此,考慮用不同的權重對綜合性能指標進行加權。假設ACC、DXC及DZH 的權重分別為wj(j=1,2,3),w1+w2+w3=1。文獻[13]提出加權形式包括凹函數、凸函數及線性加權等多種形式,并給出了相應的示例及計算方法。為使指標的改善和惡化權重一致,在此采用線性加權的方式對各指標進行加權求和,綜合性能指標J 表達式為

J的值越小,表示懸掛綜合性能越優。
2 Bang-Bang控制算法及其改進
2.1 Bang-Bang控制算法
簡單Bang-Bang 控制算法以平衡位置為基準,當對象偏離平衡位置時,施加相反方向的力,將其往平衡位置“拽”[14]。而MRD 阻尼只能在大小阻尼之間切換,當MRD可控制力方向與需要的力方向相反時,MRD 輸出最小阻尼力以減少對系統運動的破壞;當MRD可提供的控制力方向與需要的控制力方向相同時,則提供最大的阻尼力。以改善車輛乘坐舒適性為目的,以車身為對象,以MRD為執行器,則簡單Bang-Bang控制算法的控制邏輯為

式中:Ff_max為MRD最大庫侖阻尼力。
假設激勵為正弦激勵,xr=A sin(ωt),簡單Bang-Bang控制下MRD阻尼力與位移、阻尼力與速度的關系及正弦時域特征分別如圖2、圖3 及圖4所示。
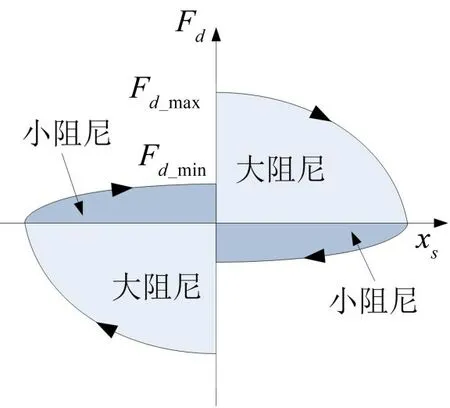
圖2 阻尼力與位移的關系
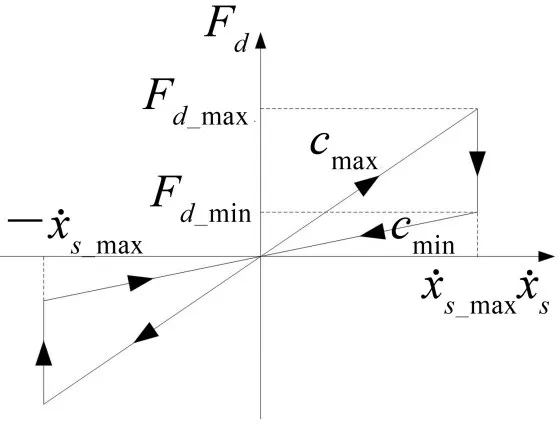
圖3 阻尼力與速度的關系

圖4 正弦時域特征
由圖2、圖3及圖4可知,在一個周期內,MRD會在大阻尼和小阻尼之間進行4次切換,橫軸上xs=0時表示平衡位置,縱軸Fd表示MRD的阻尼力。圖2中第一象限內,當xs逐漸沿正向增大,對應圖3 的由趨向0,車身垂直向上偏離平衡位置,則施加大阻尼減小偏離的趨勢;圖2中第二象限內,車體從最上位置回歸平衡位置,施加小阻尼,對應圖3 內由0趨向;圖2中第三象限內,車體向下偏離平衡位置,xs沿負方向增大,施加大阻尼,對應圖3內由趨向0;圖2中第四象限內,車體從最下位置回歸平衡位置,施加小阻尼,對應圖3 內由0 趨向根據xs和乘積的方向,即可判定大小阻尼切換的時機,圖4 從時域的角度對車身偏離平衡位置的狀態及施加大小阻尼的區域進行了描述。從圖2 可以看出,大阻尼Fd_max與小阻尼Fd_min切換時,正好處于平衡位置速度最大點,穿越平衡位置時的速度達到最大值,這會形成較大的慣性,給下一階段的減振減幅帶來不利影響。當下一階段車身偏離平衡位置運動時,阻尼需要克服該部分穿越速度帶來的慣性,如果能減小車身過平衡位置時的穿越速度,即可減小慣性,從而改善乘坐舒適性。
2.2 改進Bang-Bang控制算法
2.2.1 改進Bang-Bang控制算法原理
基于2.1 小節的分析,提出如下設想:若能通過設定xs的閾值,在回歸平衡位置之前的一小段距離ε以內,提前將MRD 切換到大阻尼狀態,則可在該車身垂直位移閾值范圍內起到緩沖作用,減小過平衡位置時的穿越速度。由于不同的路面激勵、車速及懸掛參數會使車身垂直位移值不同,因此,確定ε的大小是需要解決的一個關鍵問題,ε 過大會使懸掛始終處于大阻尼狀態,不利于車身回歸平衡位置;ε過小,又起不到減小穿越速度的抑制作用。
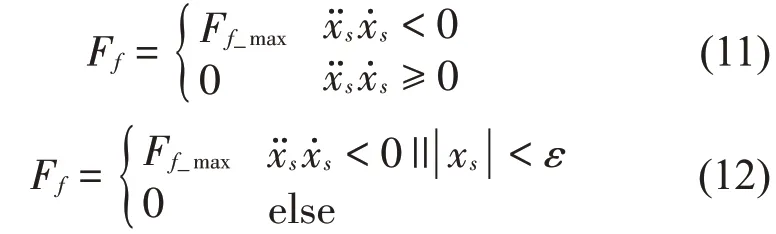
改進Bang-Bang 控制在原Bang-Bang 控制的控制邏輯基礎上,除xs區域外,添加位移閾值ε,在 ||xs<ε 區間內,將阻尼設置為大阻尼,以減小被控對象過平衡點時的穿越速度。改進Bang-Bang控制表達式為

式中:ε 為大于0 的小正數,由車身垂直位移均方根值而定。
改進Bang-Bang控制下MRD阻尼力與位移、阻尼力與速度的關系及正弦時域特征分別如圖5、圖6及圖7所示。
由圖5 可知,在需要大阻尼的區間,除第一、三象限外還包括第二、四象限xs=±ε區間內的部分,即相當于在車身回歸到平衡位置之前,已經加載大阻尼來減小車身達到平衡位置時的速度了。從圖6可以看出,簡單Bang-Bang控制最大速度為改進Bang-Bang 控制最大速度有效地減小了穿越平衡位置時的速度。

圖5 阻尼力與位移的關系

圖6 阻尼力與速度的關系

圖7 正弦時域特征
由做功公式W =Fd_maxxs可知,若要消耗等量的車身垂直振動功,改進Bang-Bang 控制增大了做功位 移xs,由 ||xs→ ||xs+ε ,等 效 而 言,所 需 的F′d_max
實際的車身垂直位移難以直接測量,加速度易于測量,而位移與加速度相位相差π,故在表達式中用替換xs,則式(9)、式(10)分別轉化為
2.2.2 ε的確定方法
1/4車懸掛參數如表2所示。
隨機路面激勵采用諧波疊加法生成,表達式為

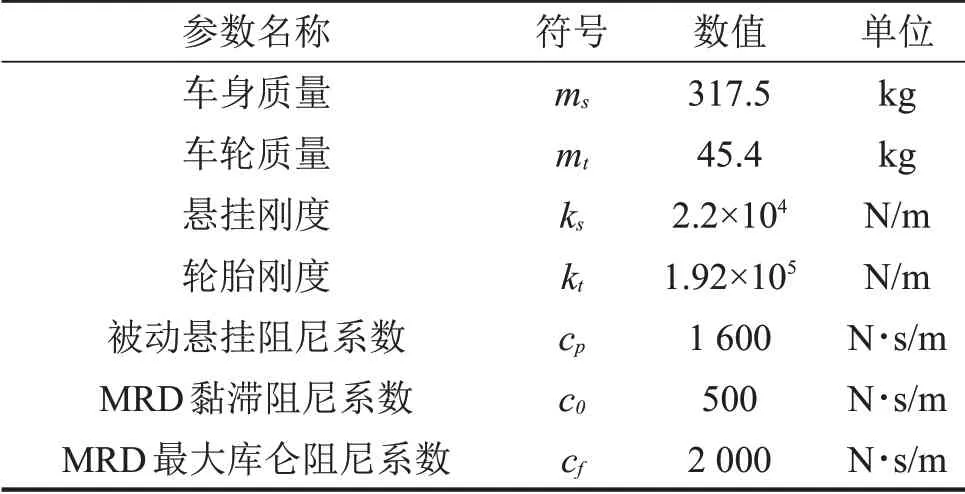
表2 1/4車懸掛參數
式中:φk為[ ]0,2π 上的隨機數,且滿足均勻分布;fmid_k為頻率區間(f1,f2)上第k 個離散區間的中心頻率,當車速為v時,fmid_k=nmid_kv;Gxr(fmid_k)為fmid_k處的譜密度值,Gxr(fmid_k)=Gxr(nmid_k)/v。
不失一般性,取D級路面v ∈[0,10]m/s,該路面條件及速度區間包含的各指標值區分明顯,但不限于該路面及車速條件。得到ACC及DIS與車速v的關系如圖8所示。

圖8 ACC及DIS與車速v的關系
由圖8 可得ACC 對應的DIS 值,調整后振動量級與主觀評價的關系如表3所示。

表3 調整后振動量級與主觀評價的關系
車身垂直位移閾值ε應當小于位移的均方根值σDIS,不同ε 的取值大小對改進Bang-Bang 控制算法性能的影響不同。為了描述ε與σDIS的關系,引入比例系數λ,表示閾值ε與車身垂直位移均方根值σDIS的取值比例關系,λ的取值影響著改進Bang-Bang控制算法的控制性能,ε=λσDIS,λ ∈[0,1],λ=0時表示簡單Bang-Bang控制。
3 算例分析
以σACC=1m/s2時人體舒適性主觀評價“比較不舒服”和“不舒服”為例,對應的σDIS=0.018 m,由圖8 可知,σACC=1m/s2時對應條件為D 級路面車速2.4 m/s。分別取λ=0、λ=0.2、λ=0.4、λ=0.6、λ=0.8和λ=1,由于更重視乘坐舒適性(對應ACC),對行駛安全性(對應DXC)及操縱穩定性(對應DZH)的重視程度一樣,因此,設定w1=0.6、w2=0.2、w3=0.2。相比于被動懸掛,簡單Bang-Bang控制及改進Bang-Bang控制下,對ACC、DXC及DZH的性能提高比率以及綜合性能指標J 與λ(同lamda)的關系進行統計,結果如圖9所示。

圖9 指標性能提高比率及J與lmada的關系
由圖9可知,增大λ的值,MRD加載大阻尼的時間占比增大,懸掛變“硬”的時間加長,可使ACC 性能改善幅度逐漸增大,由于ACC、DXC及DZH相互間的矛盾關系,降低ACC 會使DXC 及DZH 均有一定程度的惡化,惡化程度隨λ 的增大而增大。綜合性能J先減小后增大,在λ=0.6附近取得最小值,因此,在該條件下,選取λ=0.6作為綜合性能最優值對應的λ值。
3.1 仿真分析
對該值下的簡單Bang-Bang 控制及改進Bang-Bang 控制性能進行時域分析,取懸掛參數如表2 所示,時域分析如圖10 所示,指標統計結果如表4所示。
結合圖10 及表4 可知,Bang-Bang 控制及改進Bang-Bang 控 制 可 分 別 使ACC 降 低14.11% 和19.72 %,但同時會使DXC 及DZH 有所惡化,改進Bang-Bang 控制的惡化比DXC 及DZH 略大。由于更重視乘坐舒適性,因此,從綜合性能指標J 來看,改進Bang-Bang控制優于Bang-Bang控制,人體舒適性主觀評價由“不舒服”降為“比較不舒服”,達到了改進優化的目的,該結論與圖9分析結果一致。
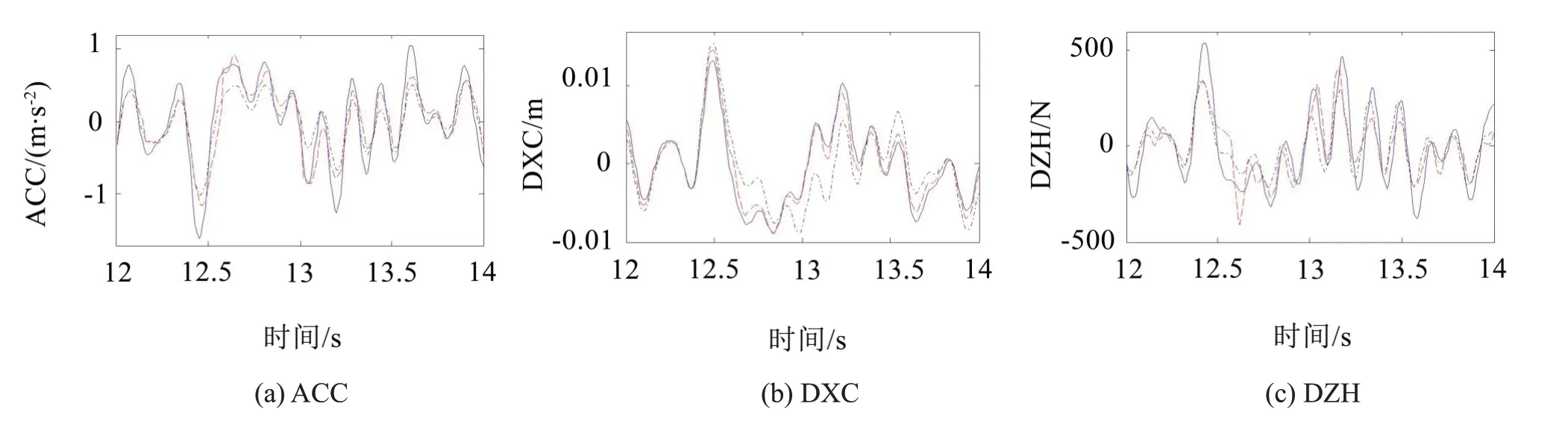
圖10 時域分析

表4 指標統計結果
車身垂直速度如圖11所示。

圖11 車身垂直速度
相比被動懸掛,Bang-Bang 控制對車身垂直速度并未起到明顯抑制作用,改進Bang-Bang 控制有效地降低了車身垂直速度,一定程度上達到了間接抑制ACC、改善乘坐舒適性的目的。
3.2 臺架試驗
為檢驗算法的有效性,基于路面譜激勵實驗臺搭建MRD振動控制試驗系統,試驗系統框圖及試驗系統分別如圖12、圖13所示。
位移傳感器及車身垂直加速度傳感器分別用以采集車輛狀態信息xs及xs,將xs微分后即可得到xs;數據采集、控制及MRD電流驅動集成模塊組將數據采集板卡、控制板卡和MRD 電流驅動板卡集成,兼具數據采集、控制及MRD 供電的功能;控制上位機用于控制集成模塊組,并存儲傳感器采集的信號;供電電源為各個模塊和傳感器供電;路面譜激勵實驗臺控制上位機用以對液壓激振臺進行控制。
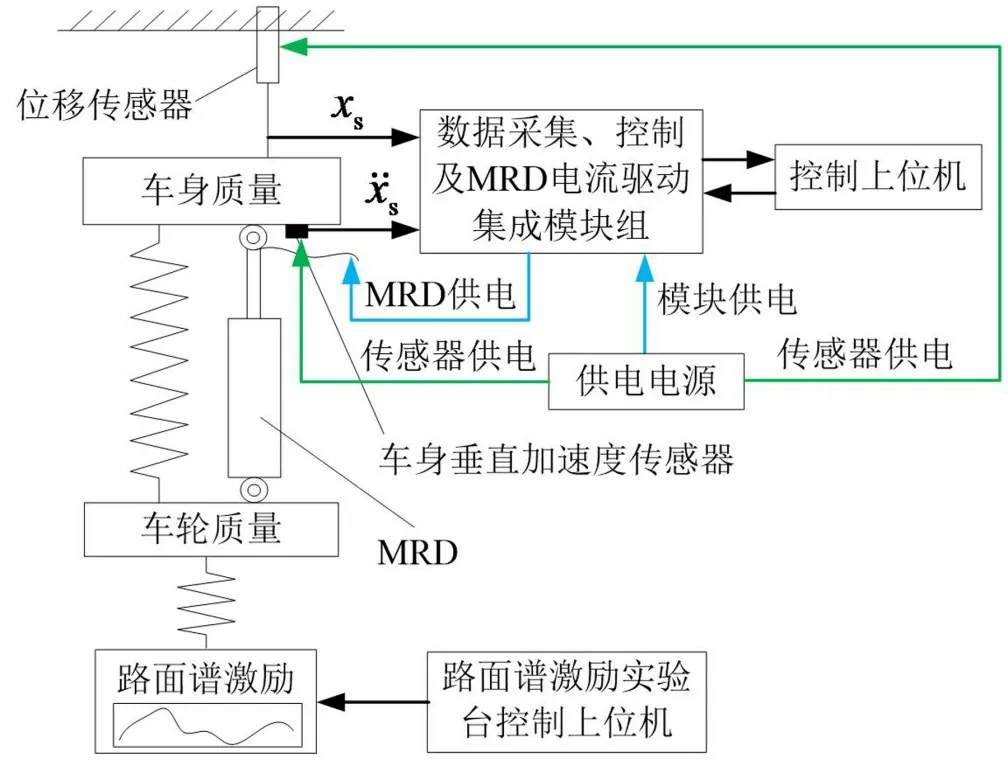
圖12 MRD振動控制試驗系統框圖
取與仿真相同的試驗參數,指標統計結果如表5所示。
結合表5,對比對應指標的仿真結果可知,Bang-Bang 控制及改進Bang-Bang 控制對ACC 及車身垂直速度的抑制幅度比仿真值略小,總評價指標J 分別 為0.956 8 及0.942 4,改 進Bang-Bang 控 制 比Bang-Bang控制小,綜合性能更優。相比之下,DXC及DZH惡化程度也略有增加,這主要是由于仿真模型相比實物做了些許簡化以及信號測量及傳輸存在誤差等。但從總體趨勢可以看出,改進Bang-Bang控制比Bang-Bang控制具有更好的控制效果。后續將在提高建模、控制精度及數據傳輸效率方面進行研究,進一步增強工程實用狀況下的控制效果。

表5 指標統計結果
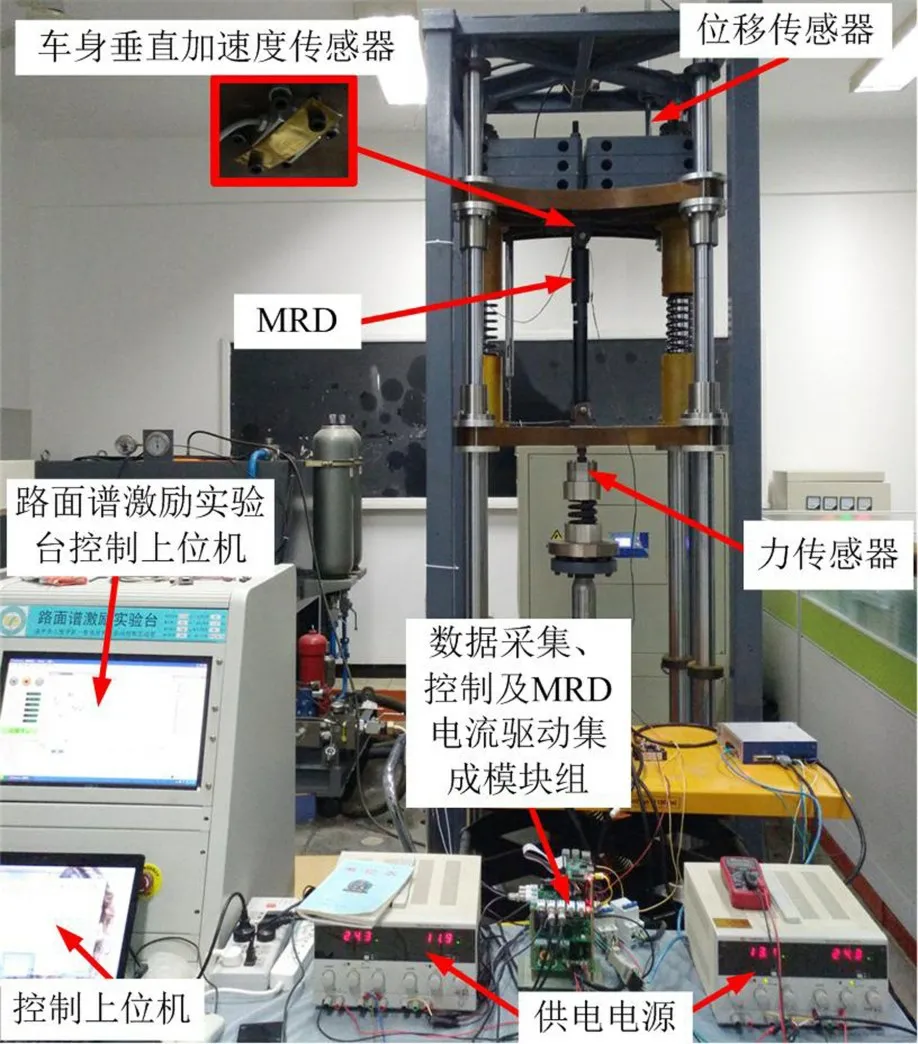
圖13 MRD振動控制試驗系統
4 結語
(1) 通過對ACC、DXC 及DZH 指標的加權,綜合性能評價指標J 可根據對3 個指標對應的車輛行駛性能指標的側重,實現對懸掛性能的綜合評價,相比單一的性能指標,綜合性能指標更為科學;
(2)隨著比例系數λ的增大,ACC性能改善幅度逐步增大,但DXC 及DZH的惡化也逐步增加,綜合性能指標先減小后增大,在λ=0.6處取得最優值;
(3) 仿真及試驗時域分析結果顯示,雖然DXC和DZH 有部分惡化,但對于ACC,改進Bang-Bang控制優于Bang-Bang 控制。從車身垂直速度來看,改進Bang-Bang 控制可顯著降低車身垂直速度,改善Bang-Bang 控制穿越平衡位置時速度過大的問題。該改進算法簡單易行,適用于車輛工程領域。
猜你喜歡
福建輕紡(2022年4期)2022-06-01 06:26:06
載人航天(2021年5期)2021-11-20 06:04:36
毛紡科技(2021年8期)2021-10-14 06:51:26
現代儀器與醫療(2021年2期)2021-07-21 02:19:12
紡織科技進展(2021年3期)2021-06-09 08:07:18
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
工業設計(2016年11期)2016-04-16 02:48:02
消費者報道(2016年3期)2016-02-28 19:07:32
汽車實用技術(2015年8期)2015-12-26 09:01:02
