基于PR控制器的航空PMSM發(fā)電弱磁穩(wěn)壓方法
2019-04-25 02:45:20史世友夏加寬王婧妍李天元龍宇航
微特電機(jī) 2019年4期
關(guān)鍵詞:系統(tǒng)
史世友,夏加寬,王婧妍,李天元,龍宇航
(沈陽工業(yè)大學(xué),沈陽 110870)
0 引 言
近年來,針對(duì)航空起動(dòng)/發(fā)電技術(shù)的研究,270 V直流高壓成為我國(guó)學(xué)者最新研究的熱點(diǎn)[1]。永磁同步電機(jī)(以下簡(jiǎn)稱PMSM)是整個(gè)系統(tǒng)電能轉(zhuǎn)換與傳遞的重點(diǎn),而由于其具有可靠性高、結(jié)構(gòu)簡(jiǎn)單、功率大和功率體積之比大等優(yōu)點(diǎn),使PMSM成為國(guó)內(nèi)外學(xué)者研究的熱點(diǎn)。PMSM因?yàn)榫哂锌赡孢\(yùn)行原理,可分為電動(dòng)和發(fā)電兩種運(yùn)行狀態(tài),在這兩種狀態(tài)下設(shè)計(jì)起動(dòng)和發(fā)電兩種系統(tǒng):在航空發(fā)動(dòng)機(jī)沒有點(diǎn)火起動(dòng)時(shí),電機(jī)處于電動(dòng)狀態(tài),拖動(dòng)航空發(fā)動(dòng)機(jī);當(dāng)航空發(fā)動(dòng)機(jī)點(diǎn)火成功以后,發(fā)動(dòng)機(jī)反過來帶動(dòng)電機(jī)發(fā)電,電機(jī)處于發(fā)電狀態(tài),為機(jī)上設(shè)備提供電源。因此,起動(dòng)/發(fā)電機(jī)的電流和電壓質(zhì)量成為重點(diǎn)。
航空發(fā)動(dòng)機(jī)拖動(dòng)PMSM處于發(fā)電狀態(tài)時(shí),由于發(fā)動(dòng)機(jī)速度時(shí)刻變化,導(dǎo)致發(fā)電機(jī)輸出電壓頻率和幅值也時(shí)刻變化。因此,PMSM發(fā)電系統(tǒng)整流與穩(wěn)壓控制策略維持著整個(gè)系統(tǒng)輸出恒定的直流母線電壓[2]。文獻(xiàn)[3]采用二極管不控整流電路后接Buck斬波電路實(shí)現(xiàn)穩(wěn)壓,但是在高轉(zhuǎn)速時(shí),對(duì)DC-DC電路中功率器件的耐壓或耐流選型造成困難而且諧波含量較大。文獻(xiàn)[4-5]采用基于單電流弱磁穩(wěn)壓控制和基于d軸電壓弱磁穩(wěn)壓控制策略實(shí)現(xiàn)穩(wěn)壓,矢量控制中通常采用PI直流調(diào)節(jié)器控制電流環(huán),對(duì)d,q軸電流id,iq進(jìn)行控制時(shí),需要將發(fā)電機(jī)的三相電流進(jìn)行2/3變換,轉(zhuǎn)化到靜止坐標(biāo)系下,再將PI控制器的輸出信號(hào)與反饋信號(hào)在靜止坐標(biāo)系下執(zhí)行,得到靜止坐標(biāo)系下的d,q軸電壓,最后再次經(jīng)過2s/2r變換,轉(zhuǎn)化為同步旋轉(zhuǎn)坐標(biāo)軸下電壓,坐標(biāo)的多次旋轉(zhuǎn)變換,增加了控制算法的實(shí)現(xiàn)難度[6],在電機(jī)上升到高速時(shí),d,q軸電流就會(huì)有耦合現(xiàn)象。為實(shí)現(xiàn)電流解耦控制,獲得系統(tǒng)良好的動(dòng)態(tài)性能,控制系統(tǒng)中需要引入相關(guān)電機(jī)參數(shù),影響系統(tǒng)的抗干擾性;此外,為降低PMSM損耗和溫升,同時(shí)提高航空電源質(zhì)量,需要對(duì)整個(gè)系統(tǒng)的低次諧波進(jìn)行抑制,基于PI控制器的系統(tǒng)需要經(jīng)過多次復(fù)雜的高低通濾波和坐標(biāo)變換,增大了系統(tǒng)的控制算法實(shí)現(xiàn)難度[7]。
本文利用比例諧振(以下簡(jiǎn)稱PR)控制器實(shí)現(xiàn)在d,q軸坐標(biāo)系下對(duì)交流電流信號(hào)進(jìn)行無差調(diào)節(jié),不需要多次坐標(biāo)變換,省去電流之間耦合項(xiàng),而且容易實(shí)現(xiàn)多次諧波的抑制補(bǔ)償。將其引入到基于電壓反饋弱磁的航空永磁起動(dòng)/發(fā)電系統(tǒng)電流調(diào)節(jié)之中,可以在系統(tǒng)中同時(shí)兼顧電機(jī)寬轉(zhuǎn)速范圍下的穩(wěn)壓和電流諧波的抑制,提高航空起動(dòng)/發(fā)電系統(tǒng)的魯棒性和航空電源質(zhì)量。
1 PMSM數(shù)學(xué)模型
在d,q軸坐標(biāo)下,PMSM的電壓方程:
(1)
PMSM的輸出電磁轉(zhuǎn)矩:
(2)
式中:ud為d軸電壓;id為d軸電流;uq為q軸電壓;iq為q軸電流;Rs為電機(jī)內(nèi)阻;Ld為電機(jī)等效d軸電感;Lq為電機(jī)等效q軸電感;Ψf為電機(jī)永磁體磁鏈;p為電機(jī)極對(duì)數(shù)[8]。
2 PMSM發(fā)電弱磁控制原理
由PMSM數(shù)學(xué)模型可以看出,勵(lì)磁電流id和轉(zhuǎn)矩電流iq決定了電機(jī)的工作狀態(tài)。當(dāng)iq,id都小于0時(shí),PMSM處于發(fā)電運(yùn)行狀態(tài)。多組id,iq值組成了PMSM運(yùn)行的電流軌跡。但在實(shí)際發(fā)電運(yùn)行過程中,id和iq不能無限制取值,需要考慮PWM整流器中開關(guān)管耐電流值和電機(jī)溫度等條件,需要對(duì)電流進(jìn)行限幅,設(shè)ismax為電流最大值[9]。
由于id和iq取值有范圍限制,因此ud和uq也有取值范圍;同時(shí)因?yàn)檎髌髦绷髂妇€電壓是恒值,使得電機(jī)端電壓幅值受限,設(shè)其最大值為usmax。直流母線電壓udc決定調(diào)制電壓最大值usmax,在SVPWM控制策略方式下,最大值可表示:
(3)
電機(jī)在發(fā)電運(yùn)行狀態(tài)滿足以下方程[10]:
(4)
將式(1)代入式(4),則對(duì)電壓的限制也可以轉(zhuǎn)化為對(duì)電流的限制:
(5)
由式(4)、式(5)可以得到以id,iq值為變量下,基于id,iq坐標(biāo)系的PMSM運(yùn)行軌跡圖,如圖1所示。PMSM工作在第三象限時(shí),處于發(fā)電狀態(tài),由式(4)可得到電機(jī)運(yùn)行時(shí)id,iq值形成的電流極限圓;由式(5)可得到不同轉(zhuǎn)速下電機(jī)運(yùn)行時(shí)的電壓限幅值曲線,也叫電壓極限橢圓[11]。圖1中,最大轉(zhuǎn)矩電流比(以下簡(jiǎn)稱MTPA)控制策略下,A點(diǎn)是三線交叉重合點(diǎn)。隨著原動(dòng)機(jī)拖著PMSM轉(zhuǎn)速升高,根據(jù)發(fā)電MTPA控制策略,電機(jī)按照?qǐng)D1的曲線AB-BC運(yùn)行,保證電壓和電流都在控制系統(tǒng)的限值范圍以內(nèi)。
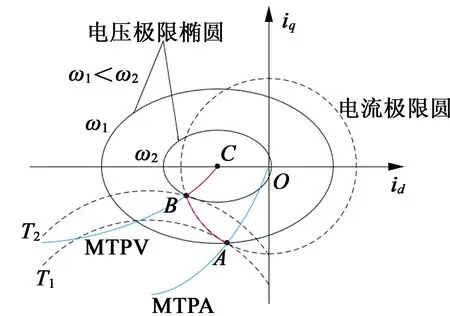
圖1定子電流矢量軌跡
當(dāng)航空發(fā)動(dòng)機(jī)以較低轉(zhuǎn)速拖動(dòng)PMSM處于發(fā)電狀態(tài)時(shí),控制系統(tǒng)采用發(fā)電MTPA的控制策略。可以看出,此時(shí)電流工作點(diǎn)位于圖1中A點(diǎn),PMSM以最小定子電流被拖動(dòng)起動(dòng)[13]。隨著航空發(fā)動(dòng)機(jī)轉(zhuǎn)速的上升,PWM整流器的直流母線電壓udc維持恒定,電壓極限橢圓慢慢變小,PMSM的反電動(dòng)勢(shì)越來越大,將受到電壓極限橢圓的限制,此時(shí)就要增加負(fù)向的id電流,起去磁作用,降低電機(jī)反電動(dòng)勢(shì),維持直流母線電壓不變。基于發(fā)電MTPA控制與電壓弱磁反饋法的框圖如圖2所示。

圖2基于發(fā)電MTPA控制與電壓弱磁反饋法控制框圖
3 PR控制器
3.1 PR控制器模型
PR控制器由比例環(huán)節(jié)和二階積分環(huán)節(jié)構(gòu)成,其傳遞函數(shù)[15]:
(6)
式中:Kp為比例常數(shù),Ki為控制器的積分常數(shù);ω0為控制器設(shè)定的諧振頻率。PR控制器與PI控制器的根本區(qū)別在于它的積分環(huán)節(jié)為二階。 將諧振頻率ω0=400 rad/s和Ki=100代入式(6)中,波特圖如圖3所示。
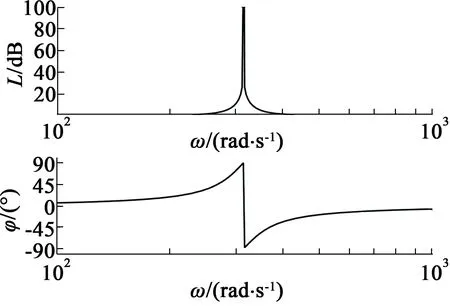
圖3PR控制器波特圖
由圖3中可以看出,在諧振頻率ω0附近的較小帶寬內(nèi),增益遠(yuǎn)遠(yuǎn)大于其他頻率的增益。因此,當(dāng)輸入的交流信號(hào)頻率為ω0時(shí),s=jω0,由式(6)可知,此時(shí)傳遞函數(shù)的增益變得很大,可以實(shí)現(xiàn)輸入交流信號(hào)的無靜差跟蹤。在航空永磁同步電機(jī)發(fā)電系統(tǒng)控制中,將發(fā)電矢量控制中電流環(huán)的勵(lì)磁電流id,轉(zhuǎn)矩電流iq經(jīng)過2s/2r變換,轉(zhuǎn)換為同步旋轉(zhuǎn)坐標(biāo)軸下的交流量iα和iβ,輸入到PR控制器中進(jìn)行調(diào)節(jié),只需設(shè)置轉(zhuǎn)速的角頻率為ω0,即可對(duì)PWM變換器電流進(jìn)行控制,實(shí)現(xiàn)電機(jī)電流環(huán)中PR控制器的自適應(yīng)調(diào)節(jié)。
3.2 改進(jìn)型PR控制器
由圖3中可以看出,只有頻率在諧振點(diǎn)ω0處時(shí),此傳遞函數(shù)有較高的增益,而在其他頻率點(diǎn)處,傳遞函數(shù)增益非常小,因此存在高增益、帶寬過小的不足,這就會(huì)導(dǎo)致系統(tǒng)對(duì)于輸入信號(hào)的頻率選擇性很低,在實(shí)際應(yīng)用中容易引起系統(tǒng)波動(dòng)。為了加大傳遞函數(shù)的帶寬,提高系統(tǒng)的穩(wěn)定性,采用改進(jìn)型PR控制器模型[16]:
(7)
式中:ωc為系統(tǒng)截止頻率。當(dāng)諧振頻率一定時(shí),取ωc=2 rad/s和ωc=20 rad/s,得到如圖4所示的波特曲線。
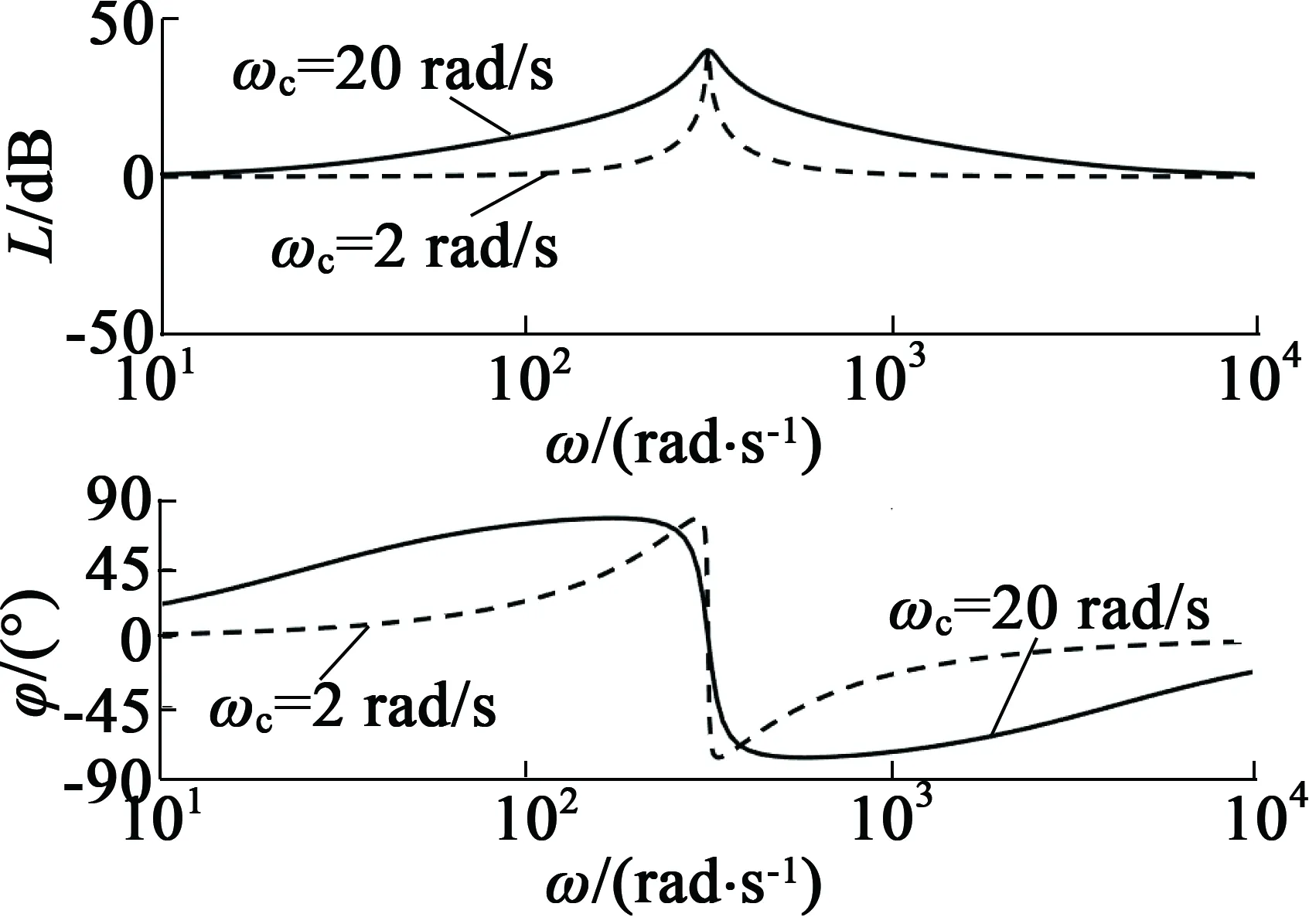
圖4改進(jìn)后PR控制器波特圖
由圖4可見,ωc的引入,雖然改善了控制器頻率特性,但沒有改變傳遞函數(shù)在諧振頻率點(diǎn)ω0處具有最大增益的特性。當(dāng)ωc變小后,傳遞函數(shù)的選頻特性也越好,因此,需要根據(jù)實(shí)際應(yīng)用來選擇ωc的取值。
3.3 改進(jìn)型PR控制系統(tǒng)諧波補(bǔ)償性能
在航空PMSM發(fā)電狀態(tài)中,電機(jī)輸出的三相電流除去開關(guān)頻率附近的高次諧波外,主要含有5,7,11次等低次諧波電流。低次諧波會(huì)引起電機(jī)噪聲大、電機(jī)轉(zhuǎn)矩脈動(dòng)和溫升高等不良后果。因此,航空電源需要整個(gè)發(fā)電系統(tǒng)能夠抑制這些低次諧波。圖5為PI控制器5次諧波抑制結(jié)構(gòu)圖。
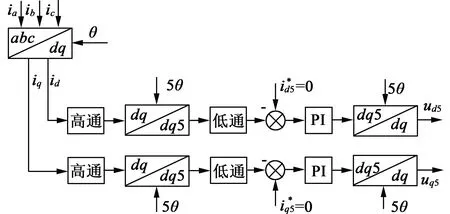
圖5PI控制器5次諧波補(bǔ)償結(jié)構(gòu)圖
從圖5可以看出,對(duì)航空電源發(fā)電系統(tǒng)中的5次諧波進(jìn)行抑制補(bǔ)償時(shí),需要進(jìn)行多次復(fù)雜的高低通濾波和坐標(biāo)變換。如果需要同時(shí)對(duì)7,11次等諧波進(jìn)行補(bǔ)償時(shí),就需要多個(gè)這種復(fù)雜結(jié)構(gòu),系統(tǒng)復(fù)雜性大大增加。
將式(7)改進(jìn)PR控制器傳遞函數(shù)中的ω0變?yōu)閗ω0(k=5,7,11,…),可以得到發(fā)電系統(tǒng)中多次諧波補(bǔ)償項(xiàng):
(8)
式(8)的傳遞函數(shù)只針對(duì)頻率kω0具有高增益,因此,可在PR控制器的傳遞函數(shù)中并聯(lián)多個(gè)傳遞函數(shù),同時(shí)抑制發(fā)電系統(tǒng)中的多次諧波。針對(duì)系統(tǒng)中存在的5,7次諧波電流,采用如圖6所示的結(jié)構(gòu)。
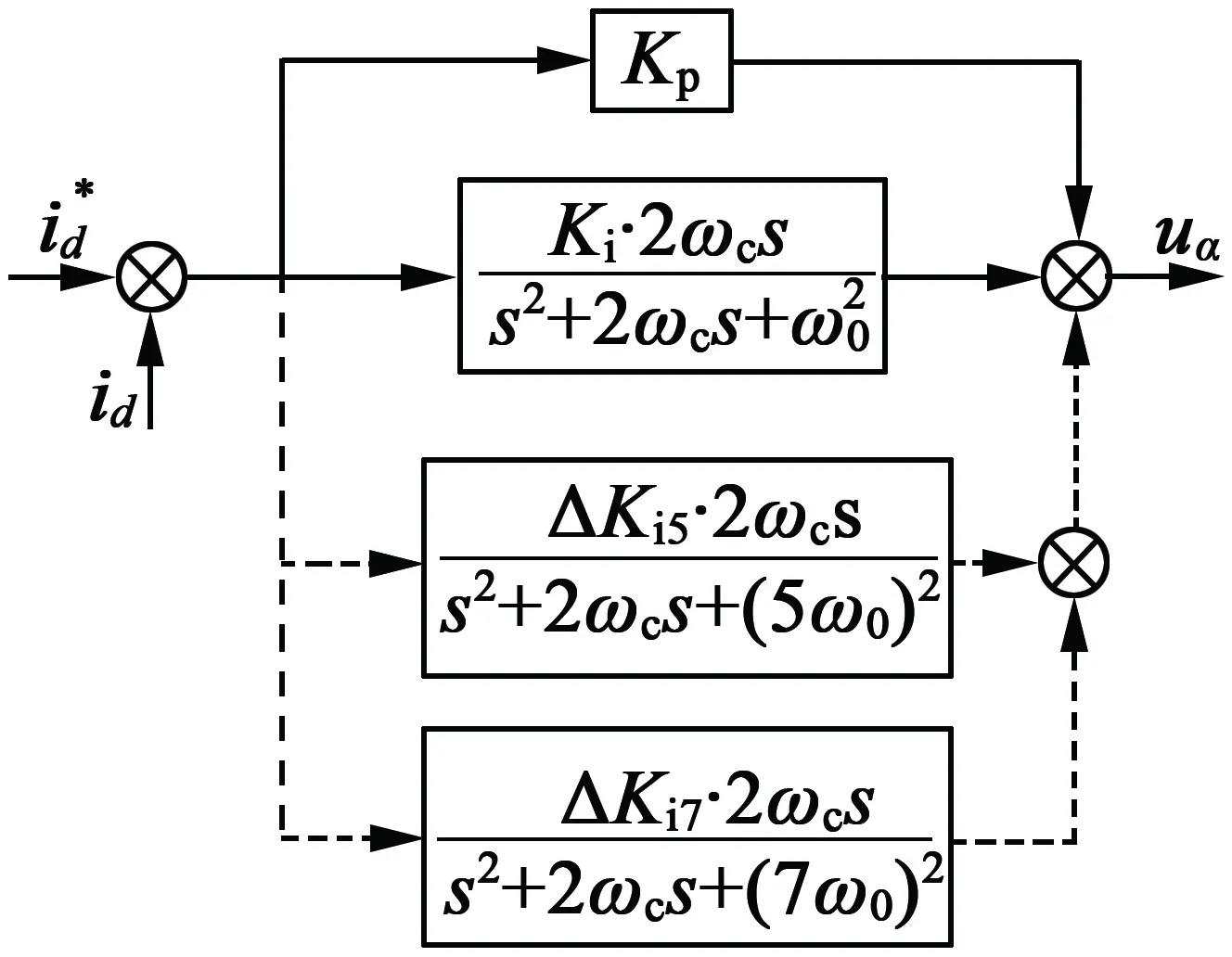
圖6多次諧波補(bǔ)償結(jié)構(gòu)圖
從圖5和圖6的對(duì)比可以看出,在系統(tǒng)的低次諧波補(bǔ)償上,PR控制結(jié)構(gòu)簡(jiǎn)單,比PI控制策略下的諧波補(bǔ)償算法更容易實(shí)現(xiàn)。
4 仿真結(jié)果及分析
根據(jù)上述PMSM控制策略的分析研究,進(jìn)行仿真驗(yàn)證。PMSM的參數(shù)如表1所示。
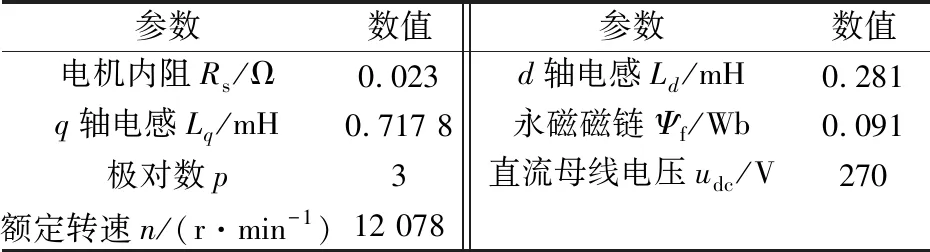
表1 PMSM參數(shù)
發(fā)電系統(tǒng)控制框圖如圖7所示,基于MATLAB中Simulink搭建相應(yīng)的仿真模塊。其中uref=270 V,ismax=300 A。
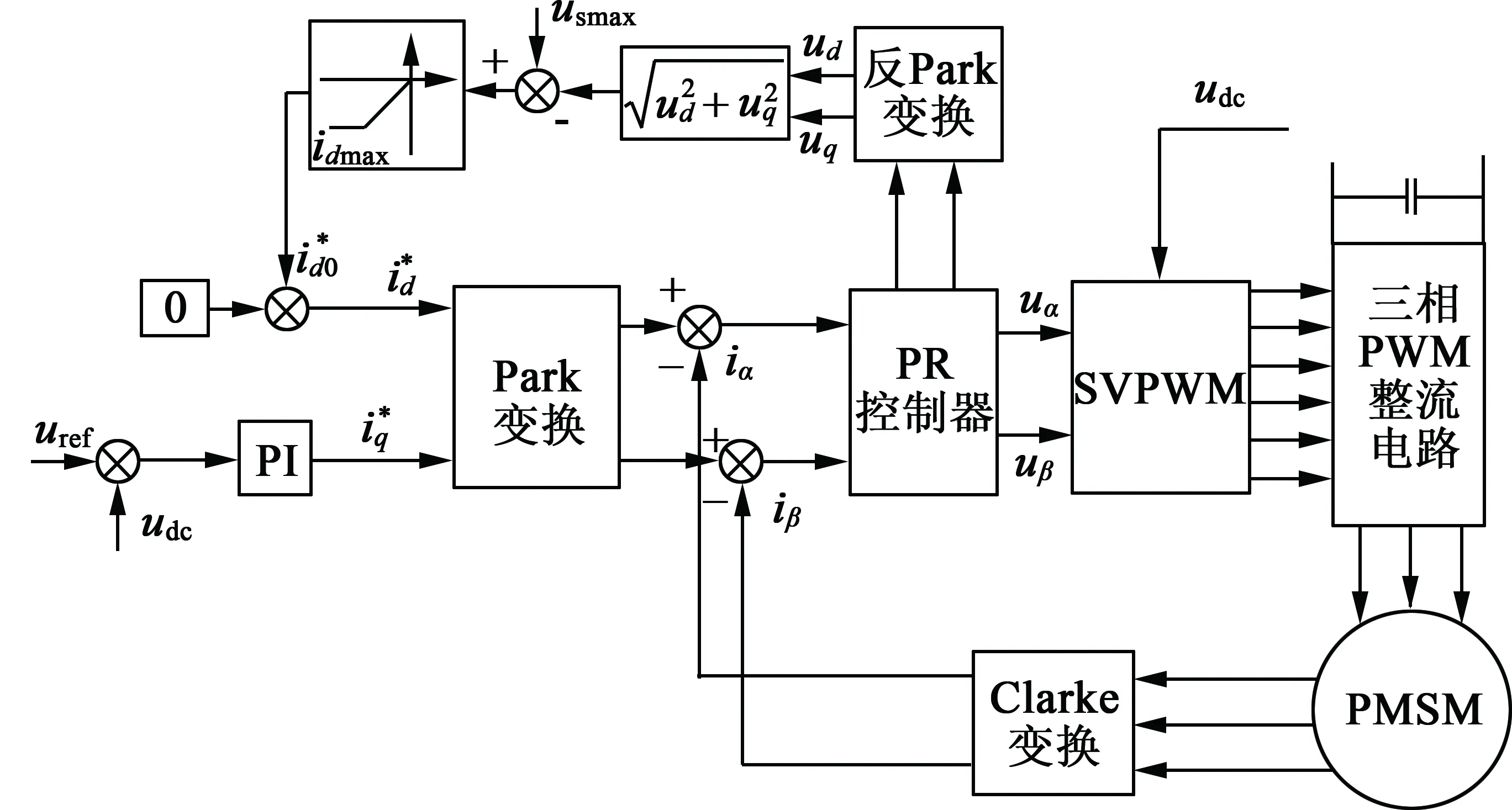
圖7PMSM整流穩(wěn)壓系統(tǒng)框圖
仿真中,輸出功率30 kW,給定負(fù)載電阻RL=2.43 Ω,PMSM發(fā)電狀態(tài)給定轉(zhuǎn)速為6 600~14 000 r/min斜坡函數(shù),仿真得到如圖8所示的系統(tǒng)輸出電壓與轉(zhuǎn)速波形。
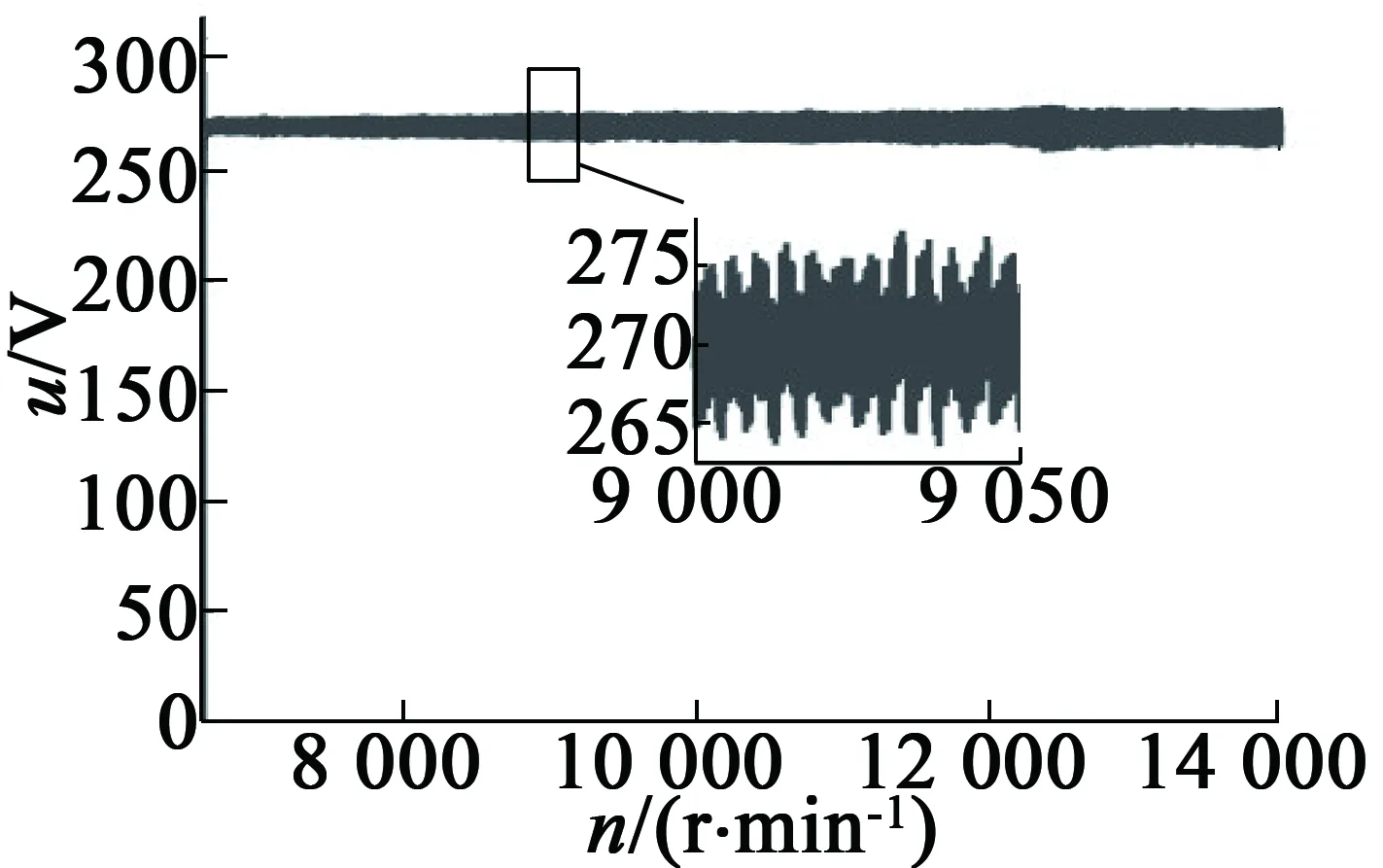
(a) 整個(gè)轉(zhuǎn)速范圍內(nèi)輸出電壓波形
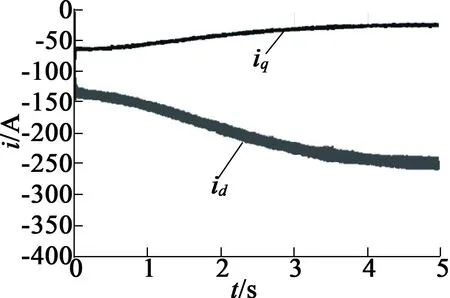
(b) 交直軸電流波形
圖8寬速下的輸出電壓和電流波形
從圖8(a)中可以看到,在航空發(fā)動(dòng)機(jī)轉(zhuǎn)速?gòu)? 600~14 000 r/min變化范圍內(nèi),航空發(fā)電系統(tǒng)輸出電壓能始終保持270 V,實(shí)現(xiàn)了該轉(zhuǎn)速范圍內(nèi)的恒壓恒功率輸出。由圖8(b)可以看出,隨著航空發(fā)動(dòng)機(jī)轉(zhuǎn)速的上升,PMSM直軸電流id不斷反向增大,說明為維持母線電壓恒定,弱磁不斷加大,交軸電流iq隨之正向變大。
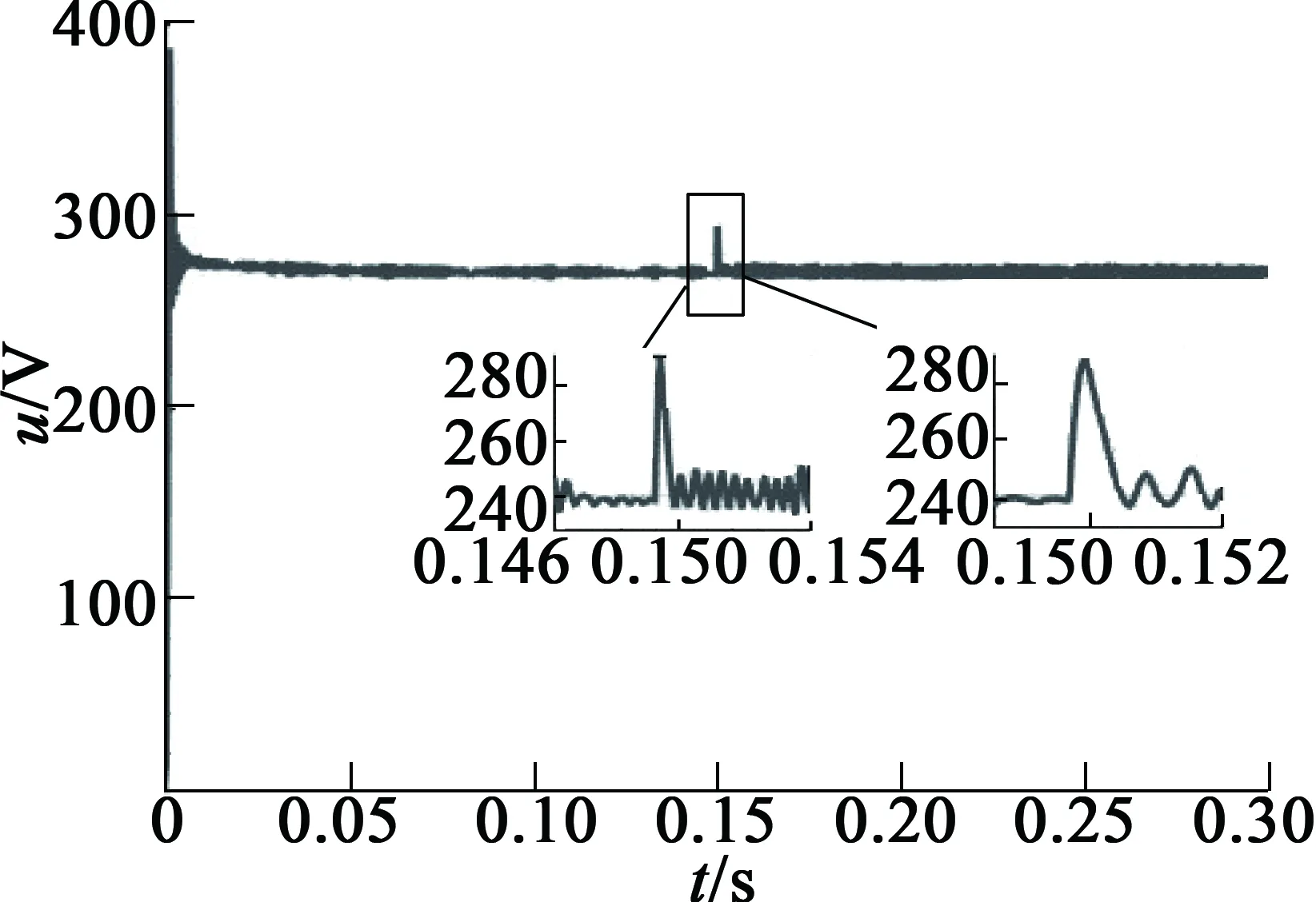
為了驗(yàn)證負(fù)載變化時(shí)整流穩(wěn)壓控制發(fā)電系統(tǒng)的動(dòng)態(tài)性能,設(shè)定PMSM為額定轉(zhuǎn)速12 078 r/min,在輸出電壓恒定后將負(fù)載從30 kW突卸到15 kW以及負(fù)載從30 kW突加到60 kW時(shí),輸出的直流電壓動(dòng)態(tài)調(diào)節(jié)過程如圖9所示。
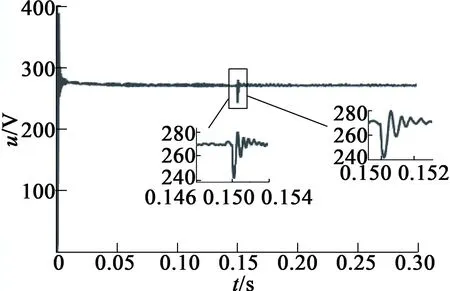
(a) 突卸負(fù)載電壓波形
(b) 突加負(fù)載電壓波形
圖9突卸、突加負(fù)載時(shí)輸出電壓波形
由圖9可以看出,輸出電壓基本保持270 V不變,輸出電壓紋波為2 V。從圖9(a)可以看出,當(dāng)負(fù)載電阻突然增加一倍,輸出電壓會(huì)有突然的下降,但是經(jīng)過0.001 s后,電壓立即恢復(fù)到270 V;從圖9(b)可以看出,當(dāng)負(fù)載電阻突然減小一倍,輸出電壓會(huì)有突然的上升,但是經(jīng)過0.001 s后,電壓立即恢復(fù)到270 V。整個(gè)動(dòng)態(tài)過程說明該發(fā)電整流穩(wěn)壓控制系統(tǒng)具有良好的動(dòng)態(tài)響應(yīng)能力和高品質(zhì)電源質(zhì)量。
基于PI控制器與PR控制器的發(fā)電系統(tǒng)電流傅里葉分解頻譜如圖10所示,對(duì)比可以看出,電流畸變系數(shù)減小,而且5,7次電流諧波含量較之前分別降低52%,44%。
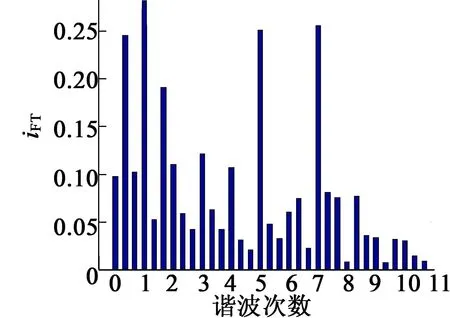
(a) PI控制器電流諧波分析
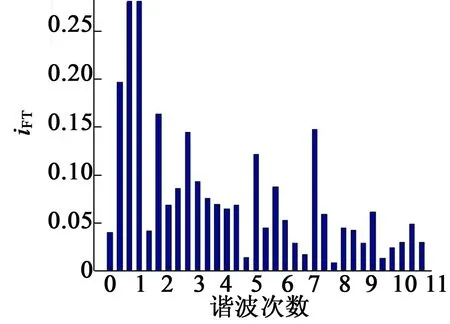
(b) PR控制器電流諧波分析
圖10PI控制器與PR控制器諧波分析
5 系統(tǒng)實(shí)驗(yàn)分析
采用DSP TMS320F28335作為控制核心的航空永磁起發(fā)電系統(tǒng)結(jié)構(gòu)如圖11所示,發(fā)電穩(wěn)壓控制器由控制部分、功率部分和檢測(cè)部分組成。控制部分電路實(shí)現(xiàn)的功能包括控制器的最小系統(tǒng)、遠(yuǎn)程通訊、數(shù)據(jù)存儲(chǔ)和掉電保存、數(shù)碼管顯示、外部輸入輸出指令、速度檢測(cè)、三相電流反饋、PWM信號(hào)輸出電路和錯(cuò)誤報(bào)警等。功率部分電路實(shí)現(xiàn)功能包括系統(tǒng)供電電源、三相電流反饋調(diào)理、六路PWM信號(hào)放大和電容預(yù)充電等。檢測(cè)部分實(shí)現(xiàn)功能有三相電流檢測(cè)和電機(jī)速度檢測(cè)。實(shí)驗(yàn)中將采用PI控制器和PR控制器兩種方法,通過實(shí)驗(yàn)對(duì)比分析證明基于PR控制器的PMSM發(fā)電穩(wěn)壓具有良好的動(dòng)態(tài)響應(yīng)能力,而且三相電流諧波含量更小。基于DSP的航空永磁起發(fā)電系統(tǒng)實(shí)驗(yàn)平臺(tái)如圖12所示。
實(shí)驗(yàn)中,PWM整流器開關(guān)頻率為20 kHz,電感為150 μH,實(shí)驗(yàn)過程中需要反復(fù)調(diào)整控制器參數(shù),以得到最優(yōu)的效果。
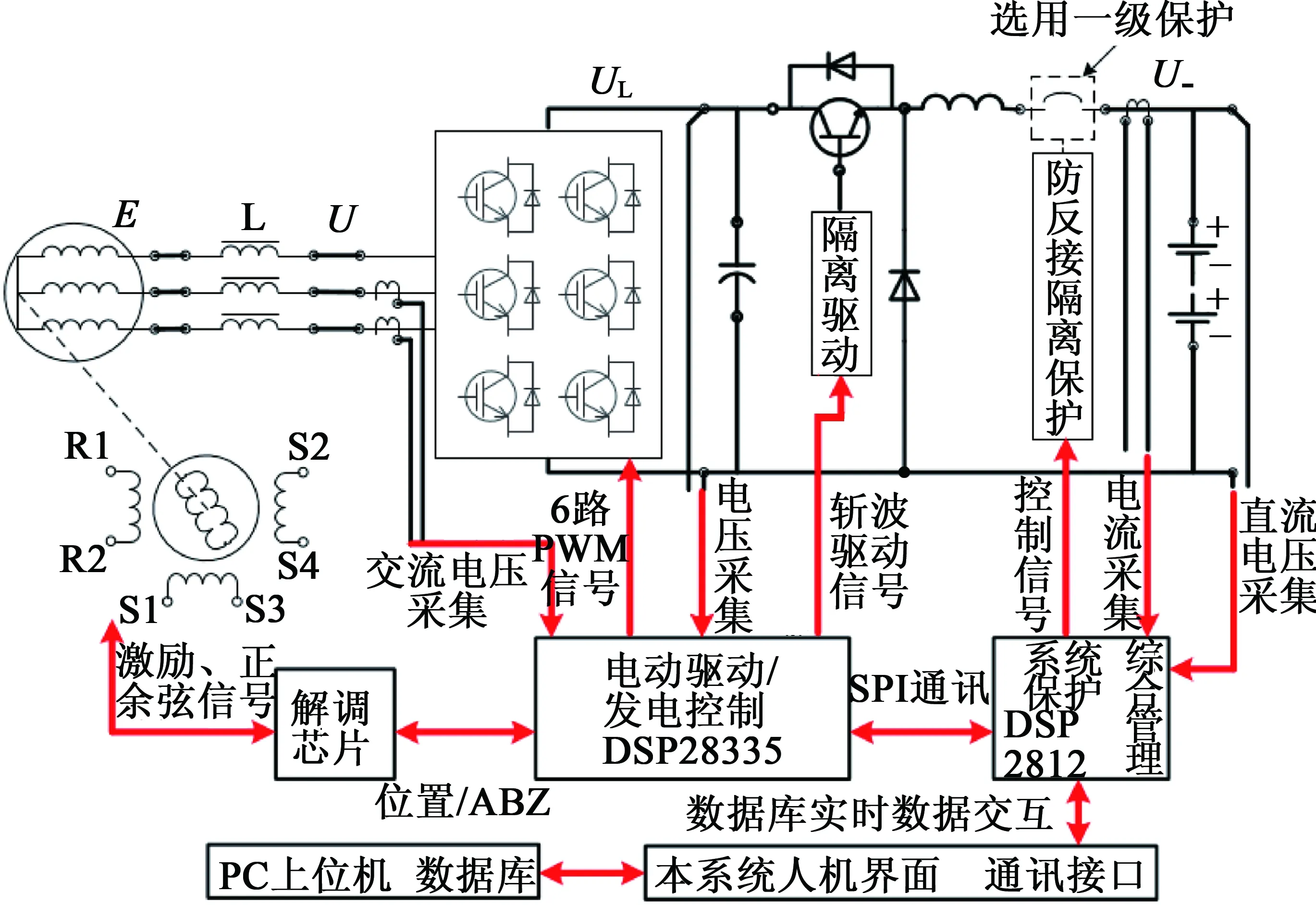
圖11基于DSP的航空永磁起發(fā)電控制系統(tǒng)框圖
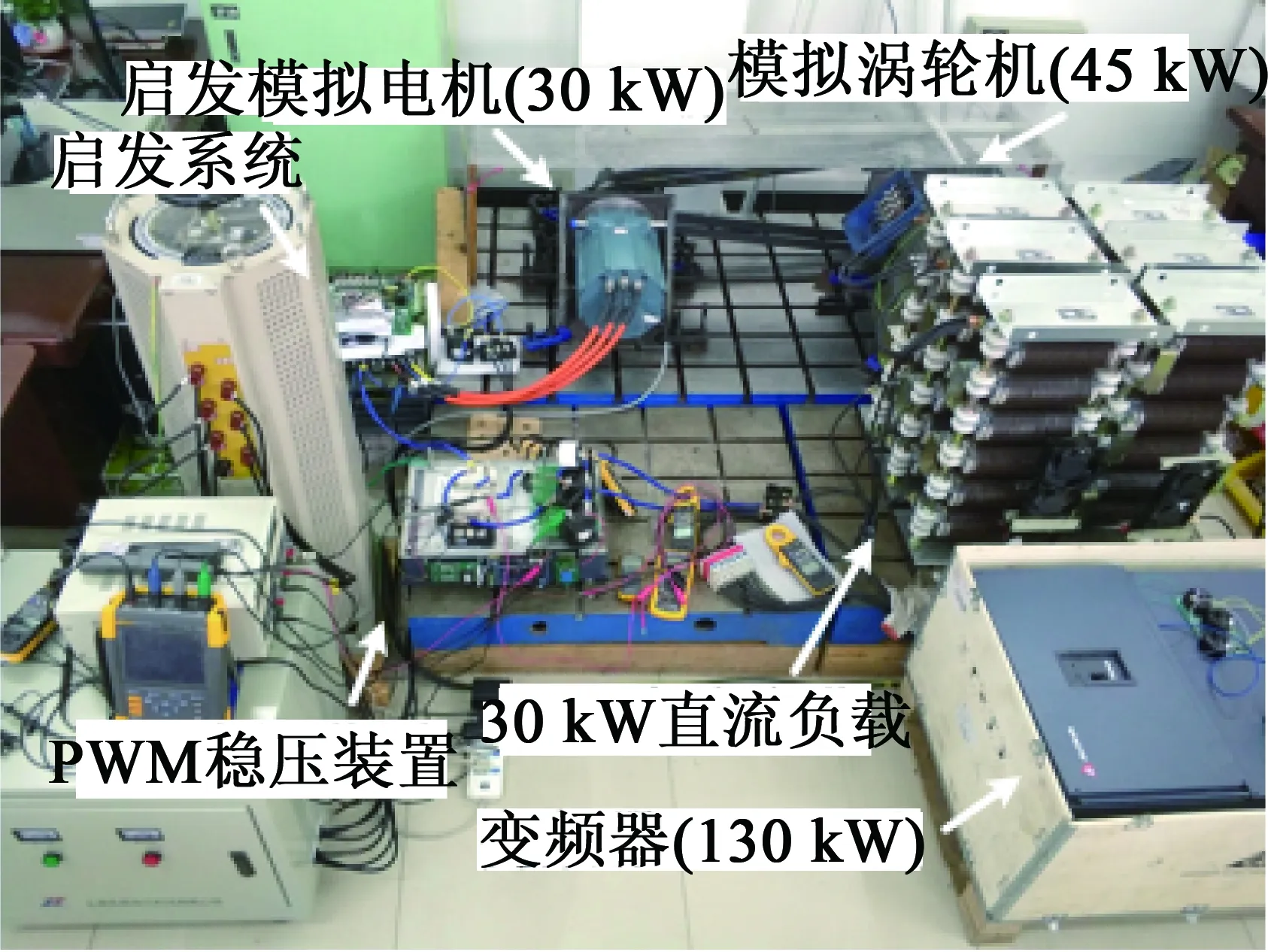
圖12基于DSP的航空永磁起發(fā)電系統(tǒng)實(shí)驗(yàn)平臺(tái)
因?yàn)轱w機(jī)大部分的工作點(diǎn)運(yùn)行在額定轉(zhuǎn)速上,因此,給定渦輪機(jī)轉(zhuǎn)速為12 078 r/min,測(cè)得系統(tǒng)后端電壓如圖13所示。
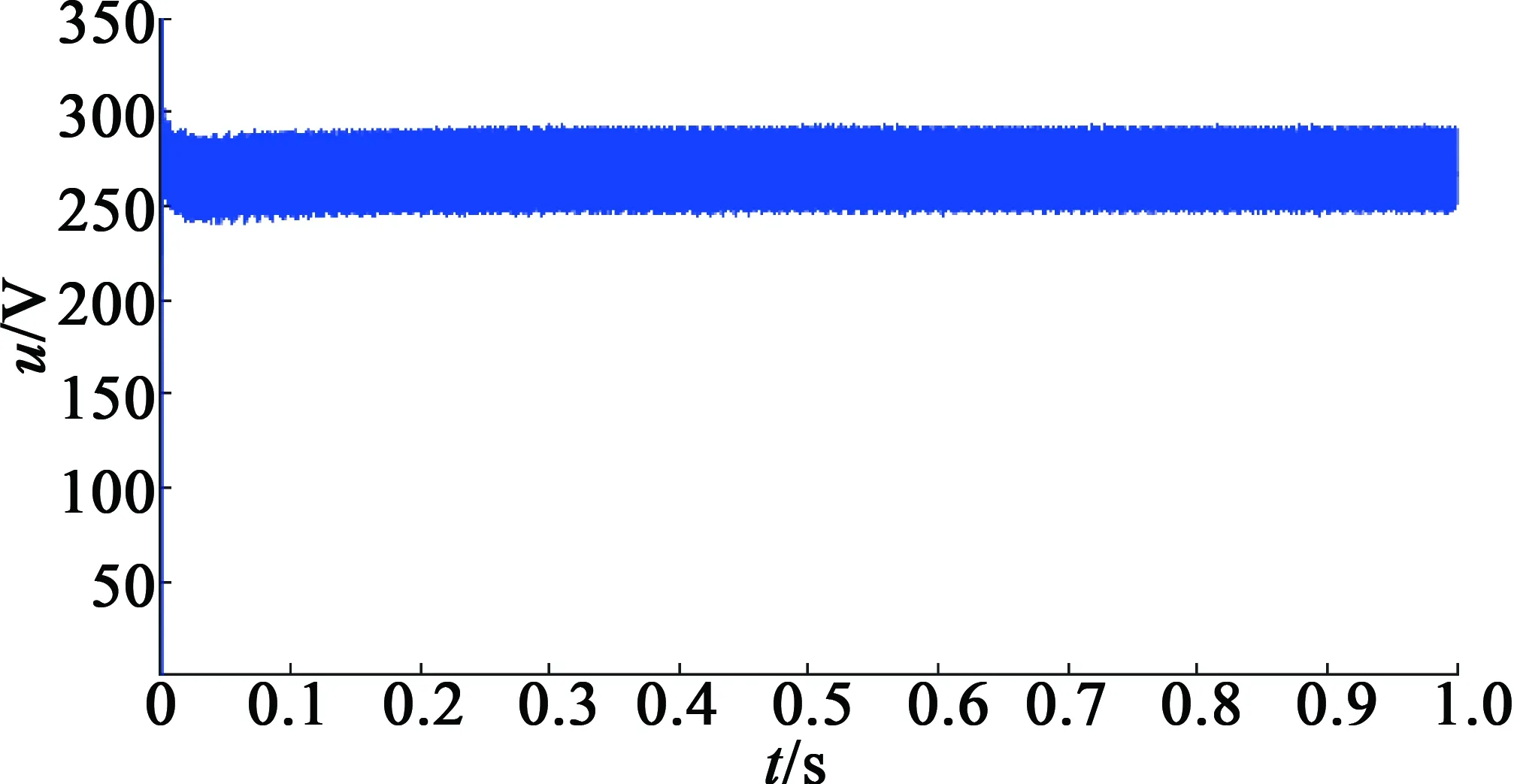
圖13航空永磁起發(fā)電系統(tǒng)輸出電壓
分別測(cè)得基于PI控制器和PR控制器的三相電流如圖14,圖15所示。由圖15可知,基于PR控制器的航空永磁發(fā)電系統(tǒng)電源質(zhì)量更高,諧波含量更少。
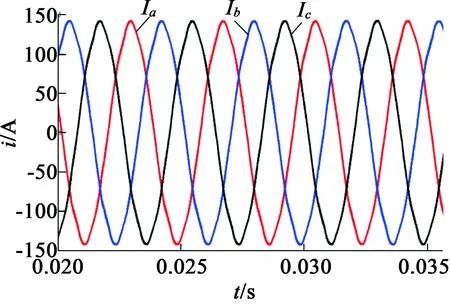
圖14基于PI控制器的三相電流
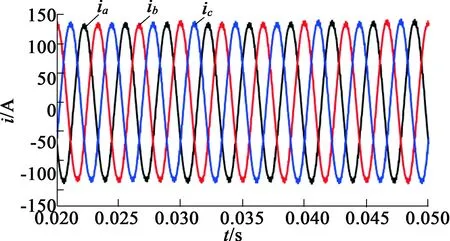
圖15基于PR控制器的三相電流
6 結(jié) 語
航空永磁發(fā)電系統(tǒng)受到較寬轉(zhuǎn)速范圍、負(fù)載變化大和高質(zhì)量電源要求的影響,本文研究基于PR控制器的電壓反饋弱磁穩(wěn)壓控制策略來適應(yīng)寬轉(zhuǎn)速范圍和諧波補(bǔ)償,提高系統(tǒng)動(dòng)態(tài)響應(yīng)和電源品質(zhì),在PWM可控整流基礎(chǔ)上,引入電壓反饋弱磁穩(wěn)壓控制策略,進(jìn)一步擴(kuò)大穩(wěn)壓的轉(zhuǎn)速范圍。仿真和實(shí)驗(yàn)結(jié)果表明,所設(shè)計(jì)的基于PR控制器的航空PMSM發(fā)電控制系統(tǒng)可以實(shí)現(xiàn)航空發(fā)動(dòng)機(jī)寬轉(zhuǎn)速范圍內(nèi)的直流270 V恒定以及突加、突卸負(fù)載時(shí)具有良好的動(dòng)態(tài)響應(yīng)能力,電流諧波含量小,實(shí)現(xiàn)了航空電源高標(biāo)準(zhǔn)的要求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32