激光自動對焦中離焦量的探測與計算方法
2019-04-26 01:43:08穆文娟
光學儀器 2019年1期
穆文娟
(合肥工業大學 儀器科學與光電工程學院,安徽 合肥 230009)
引 言
自動對焦技術興起于20世紀60年代,最初主要應用于相機。近年來,伴隨著相機技術、計算機技術以及圖像數字化技術的飛速發展,自動對焦在生物醫學、激光微加工、三維測量等各個領域開始得到越來越廣泛的應用[1-3]。
根據對焦原理不同,自動對焦方法主要可分為兩類,即基于成像圖像對焦評價的被動式對焦方法和借助激光等輔助元件進行離焦量檢測與對焦的主動式對焦方法。起初,以圖像為基準的被動式對焦方法因其具有對焦精度高且無需額外設備輔助的優點,受到國內外研究者的極大青睞,并形成了熵函數、能量梯度函數等圖像清晰度評價函數,以及函數逼近法、爬山搜索算法等圖像處理算法,但被動式對焦過程中需要大量運算[4],導致其對焦速度受到極大限制。為提高對焦運算速度,越來越多的研究者開始把研究方向集中到主動式對焦方法上來,如:加拿大WDI公司的ATF5激光自動跟蹤系統,根據半導體激光信息快速準確地提取聚焦誤差信號,在100×物鏡下,對焦精度可達±0.3 μm,對焦速度0.2 s[5];中國科學院長春光學精密機械與物理研究所的郝賢鵬等利用臨界角法自動對焦原理,應用歸一化、數字濾波等技術獲取離焦誤差信號與離焦量方向、大小的關系曲線,雖然可實現15 nm靜態分辨率,但是線性范圍小,僅為±4 μm[6]。
為同時兼顧對焦速度、對焦精度和對焦動態范圍的要求,本文提出了基于激光輔助的主動式自動對焦方法,通過分析調焦CCD獲取的激光光斑圖像信息確定被測面的對焦狀態。針對實驗中采集的一系列激光光斑圖像,結合自適應閾值二值化處理、形態學濾波、Canny邊緣檢測和最小二乘圓擬合的圖像處理方法,建立起光斑半徑與離焦量關系模型。
1 激光自動對焦原理與實驗系統構成
1.1 激光自動對焦原理
激光自動對焦原理如圖1所示,輔助激光束經過物鏡照射到被測物表面,被測面與激光對焦平面有三種相對狀態:一是被測面在對焦平面上方,稱為正離焦;二是被測面與對焦平面重合,稱為對焦;三是被測面在對焦平面下方,稱為負離焦。采用半圓激光束進行輔助對焦時,被測面與對焦平面的相對關系為正離焦、對焦、負離焦時,對應的激光光斑形狀分別為右半圓、小圓點、左半圓,且光斑半徑與離焦量大小成線性關系。故成像傳感器通過檢測光斑的形狀及大小即可確定被測面相對對焦面的方向與距離。
1.2 激光自動對焦系統構成
根據圖1所示原理設計的對焦實驗測試系統如圖2所示,對焦系統主要由激光器、分光鏡、物鏡、調焦透鏡、CCD相機、調焦CCD等組成。激光器發出的準直光分別經過分光鏡、物鏡聚焦于被測面,形成與離焦狀態對應的激光光斑,成像傳感器從返回的激光束中讀取信息并發送信號到電機運動控制模塊,驅動電機帶動物鏡按一定方向與距離運動,實現自動對焦。
實驗測試前先調整激光出射光路與成像光路垂直,然后調整被測面與物鏡相對距離。在測試時每隔一定離焦距離采集一幅光斑圖像,并對這一系列圖像進行觀察及處理,建立光斑圖像信息與離焦量的對應關系,以分析對焦實驗測試系統的對焦性能。
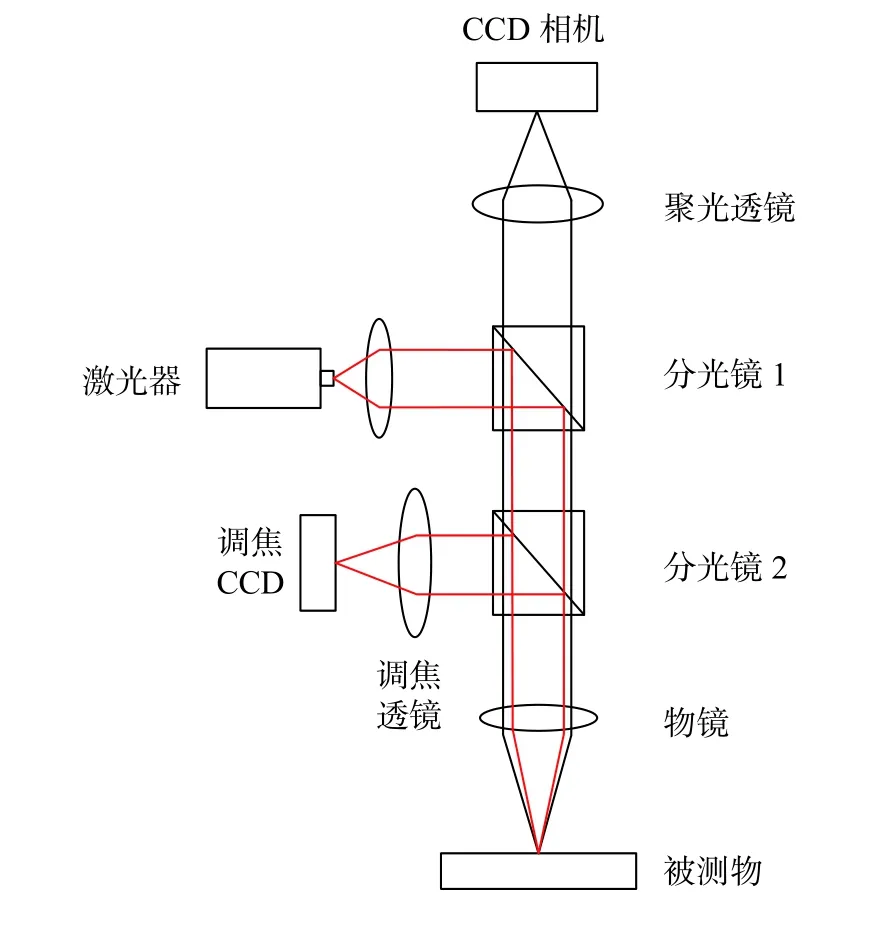
圖2 激光自動對焦系統Fig. 2 The auto-focus system using laser
2 激光光斑圖像處理
2.1 圖像預處理
相機采集到的激光光斑圖像包含多種噪聲,采集到的光斑也不是完美的實心圓,而是一個有部分缺失或亮暗相間的環圈,故需對圖像進行預處理,處理流程如下:
1)圖像灰度化;
2)使用Otsu算法實現圖像自適應閾值二值化分割;
3)通過形態學開閉交替濾波[7],去除光斑內部瑕疵及外輪廓雜散信息;
4)通過腐蝕、膨脹操作,填充光斑圖像內部孔洞。
2.2 圖像邊緣提取
光斑圖像邊緣提取是后續圓擬合的基礎,本文采用Canny算子提取光斑外輪廓。首先選擇一個準高斯函數對圖像進行平滑運算,接著通過Sobel算子分別計算水平方向梯度Gx和垂直方向Gy的一階偏導,以確定像素點的梯度G和梯度方向θ,各參數分別為:

2.3 光斑圓擬合
根據光斑邊緣檢測結果即可得一系列離散點,理論上這些點應構成一個圓,故可從這些點出發,求取該圓圓心位置和半徑大小。本文選取某一光斑圖像,并對圖上光斑邊緣點進行最小二乘法圓[9]擬合,擬合得到該圓圓心坐標和半徑分別為(669,467),209.48像素。
圖像預處理(灰度化、二值化、形態學濾波、填充孔洞)、光斑邊緣提取、光斑最小二乘圓擬合結果如圖3所示。
3 激光自動對焦實驗及結果分析
以平面鏡為被測面,調整其與物鏡的相對距離,每隔相同距離采集一幅光斑圖像,并通過上述一系列圖像處理過程求取光斑半徑數值。實驗結果顯示,光斑半徑大于480像素,即離焦量大于220 μm時,光斑大小超出調焦CCD視場范圍,該系統不再具有自動調焦能力。在系統動態測量范圍內,光斑半徑與離焦量關系如圖4所示(正離焦與負離焦狀態下光斑半徑變化趨勢相同,故此僅分析正離焦狀態下光斑變化與離焦量的關系)。由此可見,光斑半徑與離焦量呈線性關系,離焦量大于50 μm時,光斑半徑隨離焦量變化較快,離焦量小于50 μm時光斑半徑變化趨勢變緩,但仍基本成線性變化,對光斑半徑R與離焦量s關系進行直線擬合得:

圖3 光斑圖像預處理結果Fig. 3 Results of spot image preprocessing

圖4 光斑半徑?離焦量關系圖Fig. 4 The relationship between the radius of the spot and defocus value

4 結 論
本文根據激光自動對焦基本原理搭建相應的對焦實驗系統,并對實驗中獲取的光斑圖像序列進行圖像處理,提取所需半徑信息,分析光斑半徑與離焦量的對應關系。對焦實驗結果顯示:在實際自動對焦過程中,應對離焦量≥50 μm和離焦量<50 μm兩個范圍進行分別標定,根據光斑半徑判定離焦量所屬范圍并進行離焦量換算,進而驅動物鏡移動相應距離,以實現自動對焦。本文所用輔助激光光束的直徑約為5 mm,CCD相機分辨率為1 292×964,該實驗狀態下的數據處理結果顯示,對焦系統可實現最大調焦分辨率為0.43 μm,對焦動態范圍約為±220 μm。我們后續還將通過提高調焦CCD柵格分辨率、減小激光光束半徑、增大調焦CCD視場來進一步提高系統對焦性能。