路口車輛沖突與碰撞的安全邊界條件模型
2019-04-29 08:04:30朱西產廖茂竹
天津師范大學學報(自然科學版) 2019年2期
武 彪,朱西產,廖茂竹,劉 瑞
(同濟大學 汽車學院,上海 201804)
路口是多方向車輛行駛的交匯區域,其道路環境和交通情況非常復雜,因此路口區域內交通事故頻發且后果也較嚴重.根據相關數據統計,路口發生的交通事故占交通事故總數的30%以上.因此,研究路口車輛軌跡交匯問題,并基于危險程度建立安全邊界條件模型,對提高路口區域安全性和通過效率具有重要意義.文獻[1]基于自然駕駛數據,利用DREAM(Driving reliability and error analysis method)方法分析了典型路口危險場景的誘導因素.文獻[2]分析了城市路口的諸多安全因素,通過模型擬合對路口的通行風險進行了評價,并結合安全系數對車輛進行導航.文獻[3]利用試車跑道試驗對本車左轉、對車左轉場景的駕駛員行為進行了分析,劃分出了駕駛員的緊張域和舒適域.文獻[4]利用場地測試的數據分析了駕駛員對兩車交匯的不同時間間隙的接受程度.本文采用車輛碰撞剩余時間(Time to collision,TTC)和預估通行侵入區域時間差(Estimating post encroachment time,EPET)對不同類型的路口碰撞場景進行了動態特性分析,借助危險等級評價模型,利用邏輯回歸方法,建立路口安全邊界條件模型.針對本車直行、對車左側直行(Across path across path/Left side direction,APAP/LSD)和本車左轉、對車左側直行(Left turn across path/Left side direction,LTAP/LSD)2種路口場景,具體計算出路口場景安全邊界條件.通過仿真實驗驗證了模型的有效性.
1 路口場景安全邊界條件模型
1.1 車輛動力學參數TTC和EPET
對于直行車輛駕駛狀態的危險等級,一般使用碰撞剩余時間(TTC)和距離前車時間(Timeheadway,THW)2個參數進行評估[5].TTC和THW的計算公式見式(1)

其中:Δd表示2車之間的距離;v1表示本車速度;v2表示目標車輛速度.
隨著TTC和THW數值的降低,車輛行駛狀態的危險等級上升,當TTC和THW數值為0時,碰撞事故發生.
路口區域存在車輛軌跡的交匯地帶(稱之為侵入區域(Encroachment zone,EZ)),如圖1所示,此時TTC和THW無法直接使用,需要使用預估通行侵入區域時間差(Estimating post encroachment time,EPET)[6]對路口交通碰撞場景進行評估.
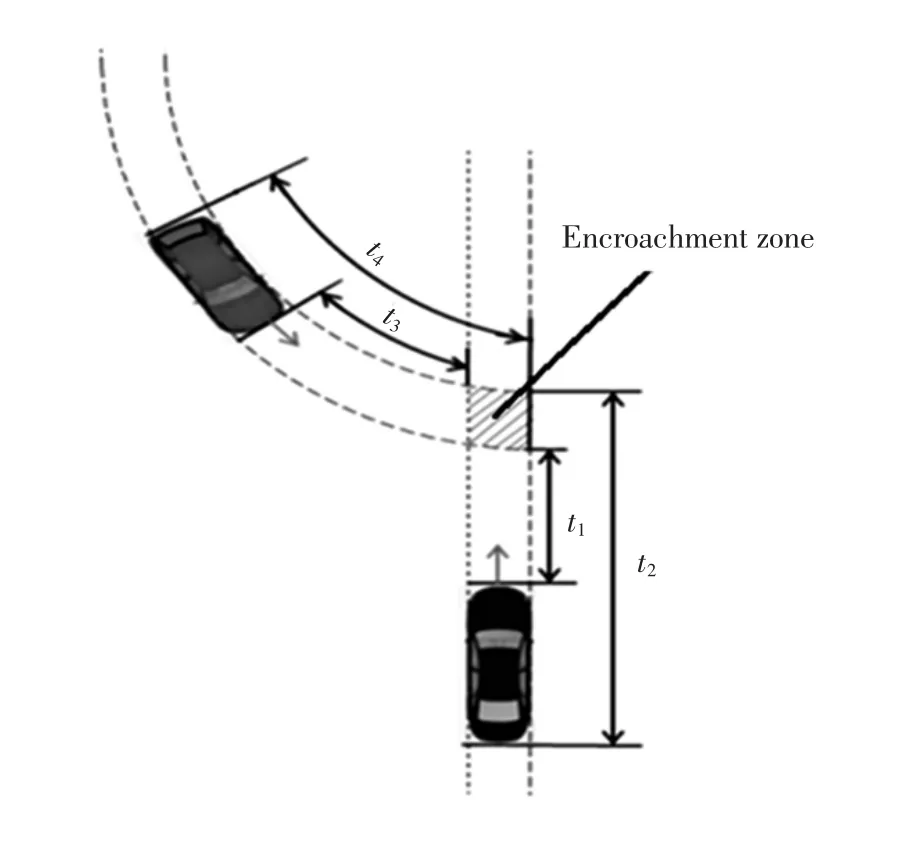
圖1 路口區域車輛軌跡交匯區域與時間差Fig.1 Trajectories and time of vehicles in intersection collision
EPET定義為前車離開路口區域與后車進入路口區域的時間差,其計算公式為

其中:t1和t2分別為本車進入和駛離侵入區域的時刻;t3和t4分別為目標車輛進入和駛離侵入區域的時刻.在車輛未全部進入侵入區域前,每個時間節點都對應相應的EPET參數.碰撞發生前,如果本車先駛離侵入區域,則EPET=t3-t2,EPET>0;如果目標車輛先駛離侵入區域,則EPET=t4-t1,EPET<0;當EPET=0時,則碰撞事故發生.侵入區域面積與沖突車輛的寬度相關,為了精準計算TTC和EPET參數,模型計算過程中需要考慮車輛的長度和寬度.
1.2 危險等級評價模型
采用文獻[7]提出的駕駛員行為自動檢測方法評價危險等級.該方法基于車輛的縱向加速度、橫向加速度以及橫擺加速度來表征車輛行駛狀態的危險等級,具體指標見表1~表3[7].

表1 根據縱向加速度定義危險等級Tab.1 Risk level determ ined by longitudinal acceleration
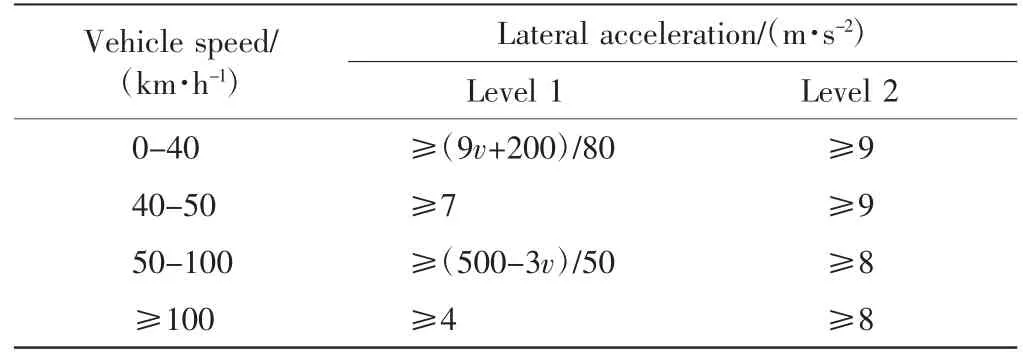
表2 根據橫向加速度定義危險等級Tab.2 Risk level determ ined by lateral acceleration
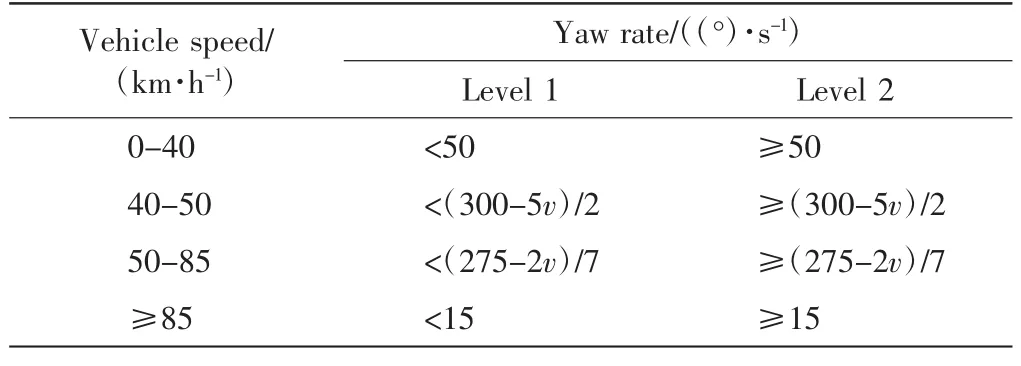
表3 根據橫擺角速度定義危險等級Tab.3 Risk level determ ined by yaw rate
1.3 邏輯回歸預測模型的建立
根據駕駛員在行車過程中的心理狀態和實際安全狀況,可將以碰撞點為終點的駕駛員的正常行車過程劃分為4個區域:舒適域、非舒適域、危險域和碰撞緩解域[8],如圖2所示.
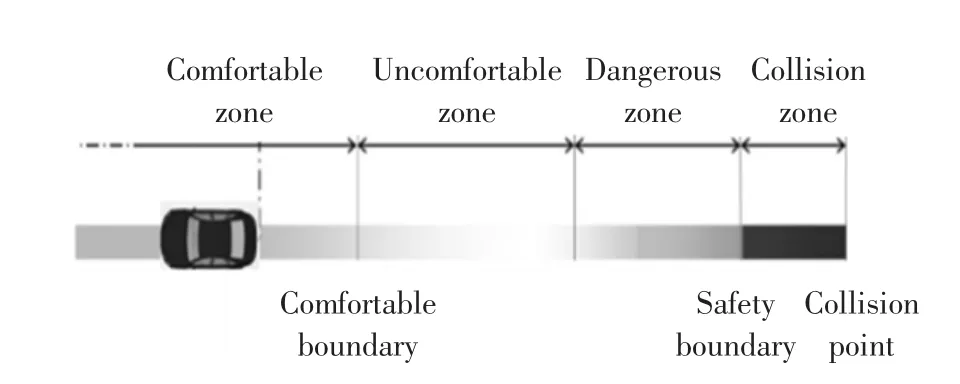
圖2 駕駛員行車過程的安全狀態圖Fig.2 Driving safety situation progress
在大多數情況下,駕駛員都處于舒適域,行車的安全程度很高.但在某些情況下,行車過程會進入非舒適域,此類工況定義為沖突類工況,其危險程度較低,出現頻率高,一般通過自然駕駛數據庫進行采集和分析.危險域的危險程度更高,一般駕駛員不會主動進入這一區域,當意外進入這一區域后,都會主動通過制動減速等措施返回到更安全的區域.危險域的右側邊界為安全域邊界,越過這一邊界后,行車狀態的危險程度將非常高,碰撞將不可避免,只能緩解碰撞帶來的后果,所以安全域邊界到碰撞點的區域稱為碰撞緩解域,此類工況定義為碰撞類工況,此類工況危險程度高,出現頻率低,需要專業的團隊對交通事故現場進行勘察鑒定,從而整理復現交通事故場景.
為構建出比較完整的路口安全邊界條件模型,需要對包括車輛沖突類工況和碰撞類工況在內的整個行駛全過程進行綜合考慮和分析.
邏輯回歸預測基于一個或多個變量(數值或分類)進行預測分析.本文采用參數TTC和EPET作為變量構建車輛行駛狀態危險等級的邊界條件模型,具體模型為

其中:x1為TTC參數;x2為EPET參數;θ0、θ1、θ2為線性回歸系數;hθ(z)為邏輯回歸輸出.以hθ(z)=0.5作為判斷標準,當hθ(z)<0.5時,表明車輛當前狀態為沖突狀態,駕駛員可采取相對柔和的制動減速操作避免碰撞事故;當hθ(z)>0.5時,表明車輛當前狀態為碰撞狀態,處于圖2的碰撞區域,駕駛員必須采取緊急的制動減速操作,以降低碰撞損傷.
2 路口安全場景邊界條件模型構建
2.1 數據庫與典型場景的選擇
本文采用的自然駕駛數據來源于中國實地運行試驗數據庫(The China field operation test,China-FOT),China-FOT主要收集了上海地區車輛行駛數據(包括道路環境數據),其中:64%來源于城區、30%來源于郊區、6%來自農村地區.China-FOT包含車輛的動力學參數(如速度與偏轉角)、駕駛員控制輸入(如制動踏板位置和方向盤轉角)以及視頻數據.
本文采用的交通事故數據來源于中國交通事故深入研究數據庫(China in depth accident study,CIDAS).CIDAS中每個碰撞事故包含2 000多項數據,如道路環境數據、車輛數據、受傷治療藥物數據、事故調查與復現數據等.該數據庫覆蓋國內不同經濟發展水平的城市,覆蓋所有路況條件和地形.
對China-FOT采集的數據進行分段標簽處理,通過危險等級評價模型篩選提取共得到778例沖突工況,其中40例發生在路口區域.在40例路口沖突工況中,本車直行、對車對向直行(Across path across path/Opposite direction,APAP/OD)占42%;本車直行、對車左側直行(APAP/LSD)占34%;本車左轉、對車左側直行(LTAP/LSD)占15%;本車左轉、對車對向直行(Left turn across path/Opposite direction,LTAP/OD)占5%.
在CIDAS數據庫的1 200例碰撞事故中,路口事故為313例,占碰撞事故總數的26%.在128例路口左側路權碰撞場景中,APAP/LSD占據最高比例49%,LTAP/LSD比例為29%,本車右轉、對車左側直行(Right turn across path/Left side direction,RTAP/LSD)比例為14%.在185例路口右側路權碰撞場景中,本車直行、對車右側直行(APAP/RSD)占據最高比例67%,本車左轉、對車右側直行(LTAP/RSD)比例為14%,本車右轉、對車右側直行(RTAP/RSD)比例為13%.
基于數據的質量和數量,本文選擇APAP/LSD和LTAP/LSD 2種典型的路口場景,基于上述已構建的路口場景安全邊界條件模型,通過分析計算確定上述2種場景的邊界條件模型.
2.2 APAP/LSD路口場景
基于63個CIDAS碰撞類工況和14個China-FOT沖突類工況,得到APAP/LSD路口場景中TTC和EPET分布,如圖3所示.
利用機器學習算法,對圖3中77個數據點進行邏輯回歸,得到各項回歸系數分別為θ0=3.543,θ1=-1.879,θ2=0.635,由此得到APAP/LSD的安全邊界條件模型為

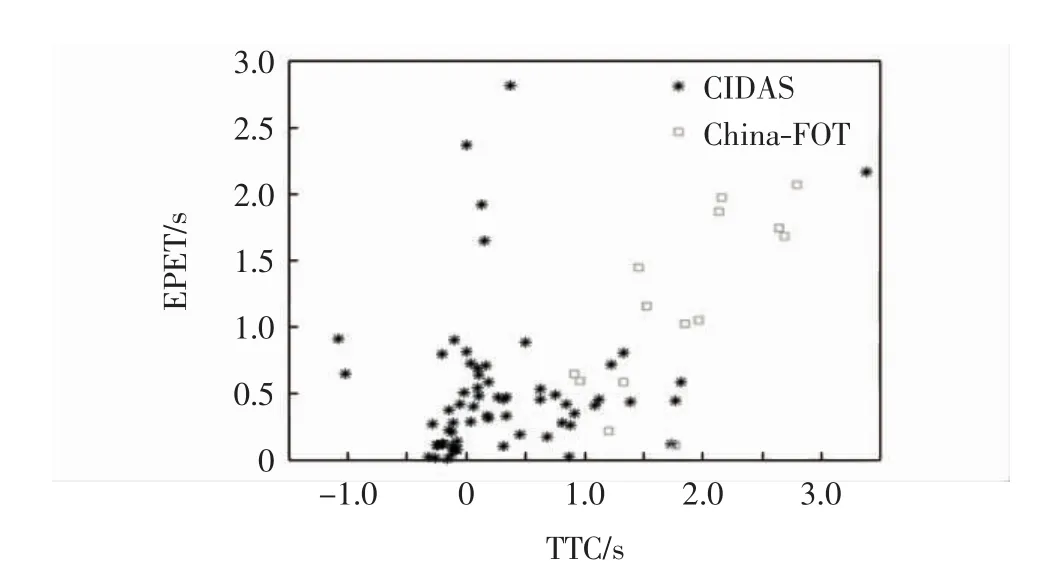
圖3 APAP/LSD路口場景TTC參數與EPET參數分布Fig.3 EPET and TTC for APAP/LSD intersection scenario
2.3 LTAP/LSD路口場景
基于37個CIDAS碰撞類工況和7個China-FOT沖突類工況,得到LTAP/LSD路口場景中TTC和EPET分布,如圖4所示.
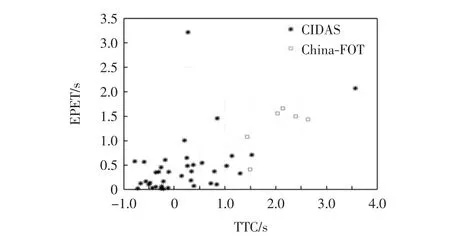
圖4 LTAP/LSD路口場景TTC參數與EPET參數分布Fig.4 EPET and TTC for LTAP/LSD intersection scenario
利用機器學習算法,對圖4中44個數據點進行邏輯回歸,得到各項回歸系數分別為θ0=3.597,θ1=-0.596,θ2=2.212,由此得到LTAP/LSD的安全邊界條件模型為

3 路口安全場景邊界條件模型驗證
基于路口車輛沖突的危險性,本研究采用模擬仿真方法對路口碰撞場景進行真實復現,進而針對路口安全場景邊界條件模型進行驗證分析.
路口車輛碰撞事故場景仿真模擬包括路口環境的真實復現和車輛動力學模型精準構建.其中路口環境采用PreScan仿真軟件進行復現,場景覆蓋車輛類型、行駛軌跡、路口類型、車道數數目、交通信號燈、周邊建筑、天氣、光照等參數.車輛動力學模型通過CarSim仿真軟件進行構建,其中涵蓋車輛底盤、懸架、發動機等系統模塊,其中本研究相關的制動系統模塊需要基于不同的車輛類型進行精準構建.
車輛整體控制策略通過Matlab Simulink進行構建,將路口安全場景邊界條件模型輸入到決策算法區域(Decision algorithm),從而確定車輛采取制動操作的時間點.將整車控制策略與PreScan軟件進行耦合,配合CarSim軟件中的車輛動力學模型,構成系統性的閉環測試流程,對路口安全場景邊界條件模型進行驗證分析.
具體的仿真模擬流程為:(1)采用PreScan軟件真實還原事故發生前5 s本車和目標車輛的運動狀態及道路環境.(2)在Matlab中采用20 Hz頻率實時計算本車和目標車輛的TTC和EPET動力學參數,并將其作為輸入傳輸至車輛控制決策算法中.(3)基于路口安全邊界條件模型,車輛控制決策算法對本車運動狀態進行實時判斷,當判定本車運行狀態為碰撞狀態時,車輛控制決策算法發出緊急制動指令.(4)基于CarSim軟件中車輛制動模型,采用車輛真實的制動壓力和路面附著系數,計算本車制動距離,判斷本車是否會與目標車發生碰撞.該仿真模擬的基礎設定條件為:(1)真實復現事故參與車輛(本車以及目標車)的初始狀態,包括位置、速度、加速度.(2)通過安全邊界條件模型探測到路口碰撞危險時,本車采取制動操作,目標車輛無制動或轉向操作.(3)基于安全冗余考慮,車輛制動時采取最大制動壓力作為輸入.
在APAP/LSD場景中真實復現63個碰撞類工況,基于路口安全場景邊界條件模型的控制獲得車輛采取制動時刻的TTC和EPET參數分布以及最終時刻的本車狀態(安全/碰撞),如圖5所示.
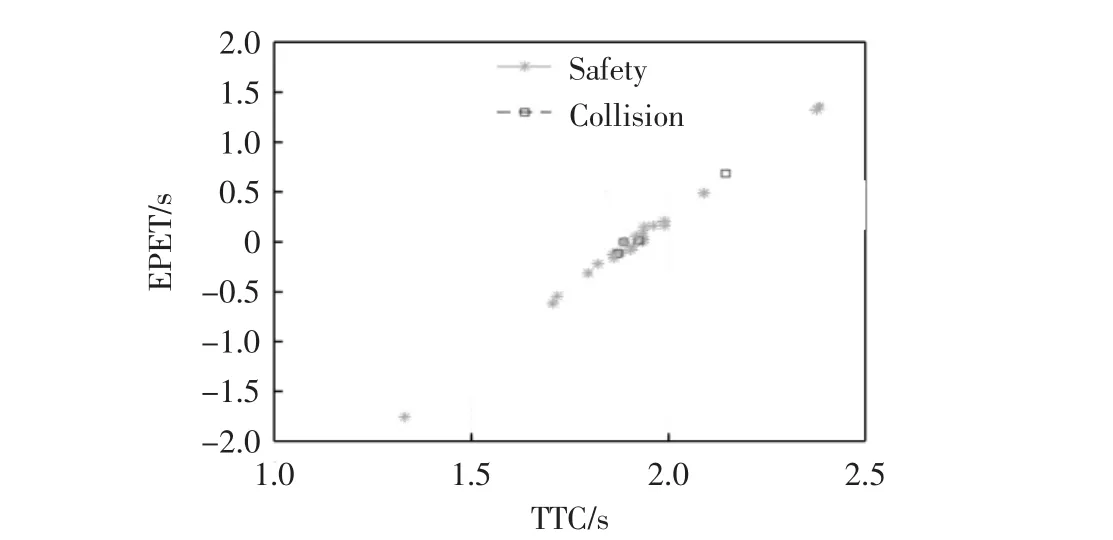
圖5 APAP/LSD仿真模擬參數分布及車輛狀態Fig.5 EPET,TTC and vehicle situation for APAP/LSD intersection scenario simulation
基于APAP/LSD路口安全場景邊界模型的控制,63個碰撞工況中本車制動時刻的TTC參數分布在1.3~2.5 s的區間,與原碰撞工況相比,本車制動時刻平均提前1.3 s,表明該路口安全場景邊界模型能夠提前預警.最終時刻車輛狀態結果表明,原63個碰撞工況中的59個避免了碰撞,路口碰撞事故率降低94%;對于無法避免的4個碰撞事故,本車碰撞時刻速度平均降低70%,真實碰撞速度和仿真碰撞速度對比見表4.
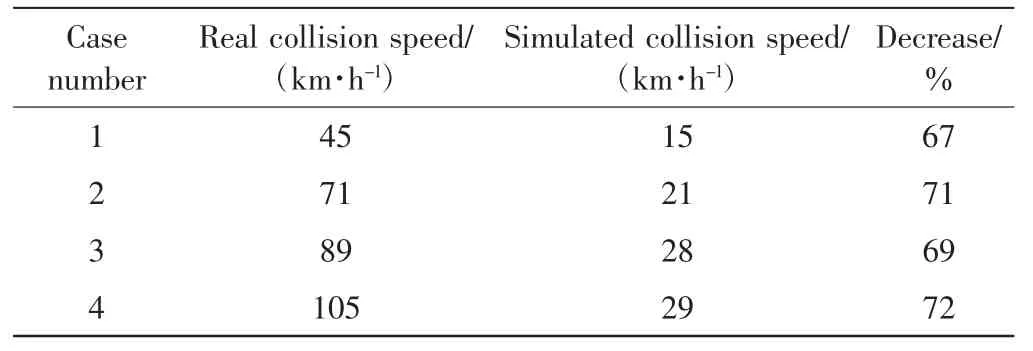
表4 APAP/LSD仿真碰撞速度分析Tab.4 Analysis of APAP/LSD simulated collision speed
在LTAP/LSD場景中真實復現37個碰撞類工況,基于路口安全場景邊界條件模型的控制獲得車輛采取制動時刻的TTC和EPET參數分布以及最終時刻的本車狀態(安全/碰撞),如圖6所示.
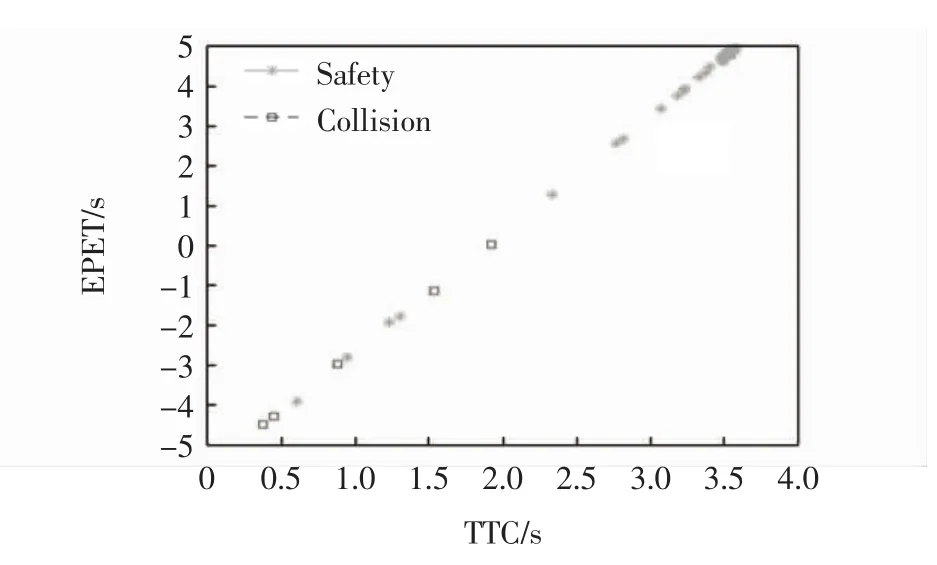
圖6 LTAP/LSD仿真模擬參數分布及車輛狀態Fig.6 EPET,TTC and vehicle situation for LTAP/LSD intersection scenario simulation
基于LTAP/LSD路口安全場景邊界模型的控制,車輛制動時刻的TTC參數75%分布在2.0~3.7 s的區間,與原碰撞工況相比,本車制動時刻平均提前1.7 s,表明該路口安全場景邊界模型能夠提前預警.最終時刻車輛狀態結果表明,原37個碰撞工況中的32個避免了碰撞,路口碰撞事故率降低86%;對于無法避免的5個碰撞事故,本車碰撞時刻的速度平均降低57%,真實碰撞速度和仿真碰撞速度對比見表5.
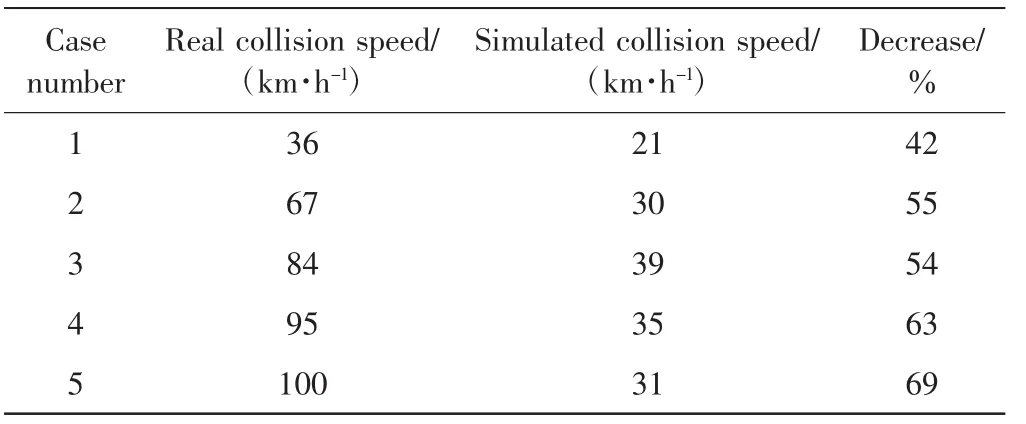
表5 LTAP/LSD仿真碰撞速度分析Tab.5 Analysis of LTAP/LSD simulated collision speed
4 結論
本文采用碰撞剩余時間TTC和預估通行侵入區域時間差EPET 2個動態特性參數,借助危險等級評價模型,利用邏輯回歸方法,建立了基于車輛制動時刻的TTC參數和EPET參數的路口場景安全邊界條件模型.使用China-FOT和CIDAS數據庫,得到了本車直行、對車左側直行以及本車左轉、對車左側直行2種路口場景的具體安全邊界條件模型.通過仿真模擬對路口安全邊界條件模型進行驗證,分析評估其對于路口區域車輛行駛狀態的影響,結果表明所建立模型可以有效避免碰撞或減輕碰撞損傷.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52