電動方向盤插秧機轉向控制系統(tǒng)設計
2019-05-11 06:52:44朱金光羅錫文張智剛
農業(yè)工程學報 2019年6期
關鍵詞:系統(tǒng)
何 杰,朱金光,羅錫文,張智剛,胡 煉,高 陽
?
電動方向盤插秧機轉向控制系統(tǒng)設計
何 杰1,朱金光2※,羅錫文1,張智剛1,胡 煉1,高 陽2
(1. 華南農業(yè)大學南方農業(yè)機械與裝備關鍵技術教育部重點實驗室,廣州 510642; 2. 雷沃重工股份有限公司,濰坊 261200)
電動方向盤作為農機導航系統(tǒng)的轉向執(zhí)行機構在中小型旱地拖拉機上已有應用,但在水田農業(yè)機械等轉向阻力大的農機上的適應性尚有待研究。該文以井關PZ-60型水稻插秧機為平臺,采用電動方向盤作為轉向執(zhí)行機構,對插秧機自動轉向控制進行了研究。構建了插秧機轉向機構的系統(tǒng)模型,采用系統(tǒng)辨識試驗獲得了系統(tǒng)模型參數。設計了基于PID的嵌套轉向控制算法,采用Simulink仿真模型驗證了算法的可行性。分別進行了幅值10°的正弦波、水田小角度轉向(直線行駛跟蹤)和水田大角度轉向(調頭)控制性能試驗,試驗結果表明:插秧機正弦波轉向跟蹤平均絕對誤差為0.301 5°,平均延時0.3 s;在泥底層平坦和不平坦的水田中直線行駛時的轉向角跟蹤平均絕對誤差分別為0.354°和0.663°,平均延遲時間均為0.6 s,角度跟蹤偏差最大分別為1.4°和3.6°,深泥腳轉向阻力大時有1.4 s的控制滯后;插秧機以28°轉向角調頭時調節(jié)時間為2.5 s,穩(wěn)態(tài)誤差為0.6%。研究表明,電動方向盤轉向系統(tǒng)具有較好的動態(tài)響應和控制穩(wěn)定性,適用于插秧機作業(yè)的自動轉向控制,滿足插秧機自動導航作業(yè)要求。
農業(yè)機械;導航;控制;電動方向盤;水稻插秧機;轉向控制;嵌套算法;系統(tǒng)辨識
0 引 言
農業(yè)機械導航技術是智能農機的重要技術之一[1-2]。自動轉向控制是實現農業(yè)機械自動導航控制的基礎,是導航系統(tǒng)中的關鍵執(zhí)行環(huán)節(jié)[3],其控制性能和適應性直接影響導航控制的實際效果[4]。
常見的自動轉向控制方法包括電控液壓控制方法、電機控制方法和線控轉向控制方法[5-10],農業(yè)機械上常采用前2種方法。電控液壓轉向系統(tǒng)主要由液壓泵、電控比例轉向閥和轉向控制器等部分組成,其優(yōu)點是控制功率大,響應快;缺點是后裝改造困難[11-13]。目前,中大功率導航拖拉機主要采用電控液壓轉向系統(tǒng)[14]。電機控制轉向系統(tǒng)采用直流電機或步進電機作為轉向驅動,對農業(yè)機械的轉向機構進行改造,實現自動控制。電機控制轉向系統(tǒng)的主要優(yōu)點是對農業(yè)機械轉向系統(tǒng)改動小,缺點是手動自動切換離合機構復雜,傳動機構安裝精度要求較高,且對不同車型適應性較差[15-17]。約翰迪爾、拓普康、聯適和華測等公司對電機控制轉向系統(tǒng)進行了改進和優(yōu)化,推出了安裝在方向盤上或直接取代原方向盤的電機(簡稱電動方向盤),其傳動機構緊湊,安裝簡單,具有手動自動切換功能,適合對農業(yè)機械轉向機構進行自動控制改造[18-19]。相比于電控液壓轉向系統(tǒng),電動方向盤的缺點是:1)因為是間接控制轉向,響應需要更高頻的控制;2)控制精度受農機轉向系統(tǒng)的自由行程和轉向器間隙等因素的影響較大;3)轉向力矩小,是否適用于水田機械等轉向阻力大的農機尚有待研究。
本文以井關PZ-60型水稻插秧機為試驗平臺,采用電動方向盤對轉向機構進行改造,以實現轉向自動控制;根據自動導航插秧機水田作業(yè)時轉向控制阻力大且多變的特點,建立轉向機構的系統(tǒng)模型,設計一種帶死區(qū)的嵌套控制算法,通過Simulink仿真和田間試驗研究插秧機電動方向盤自動轉向控制在水田作業(yè)環(huán)境下的適用性。
1 系統(tǒng)硬件設計
1.1 電動方向盤轉向機構
井關PZ-60型水稻插秧機采用整體式液壓助力轉向系統(tǒng),難以實現電控液壓自動轉向設計。本文采用上海聯適導航技術有限公司生產的電動方向盤替換原插秧機的方向盤的方式進行改造。電動方向盤的主要參數如表1所示,安裝結構如圖1所示。
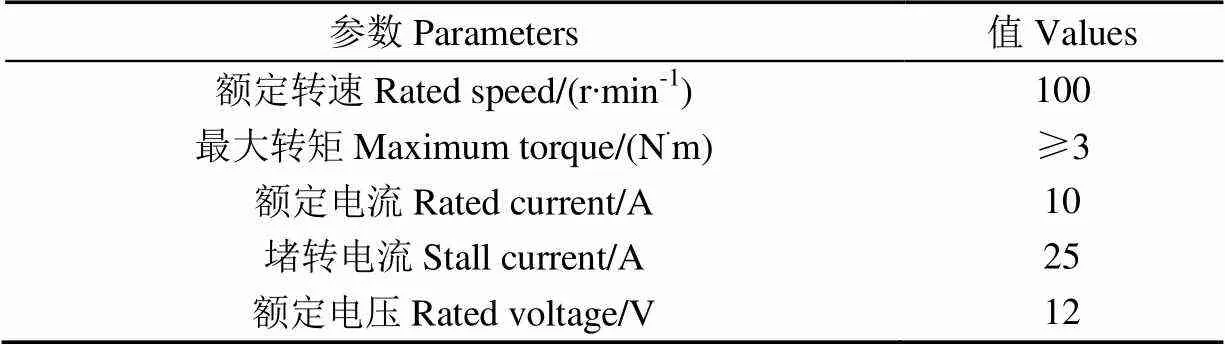
表1 電動方向盤主要參數
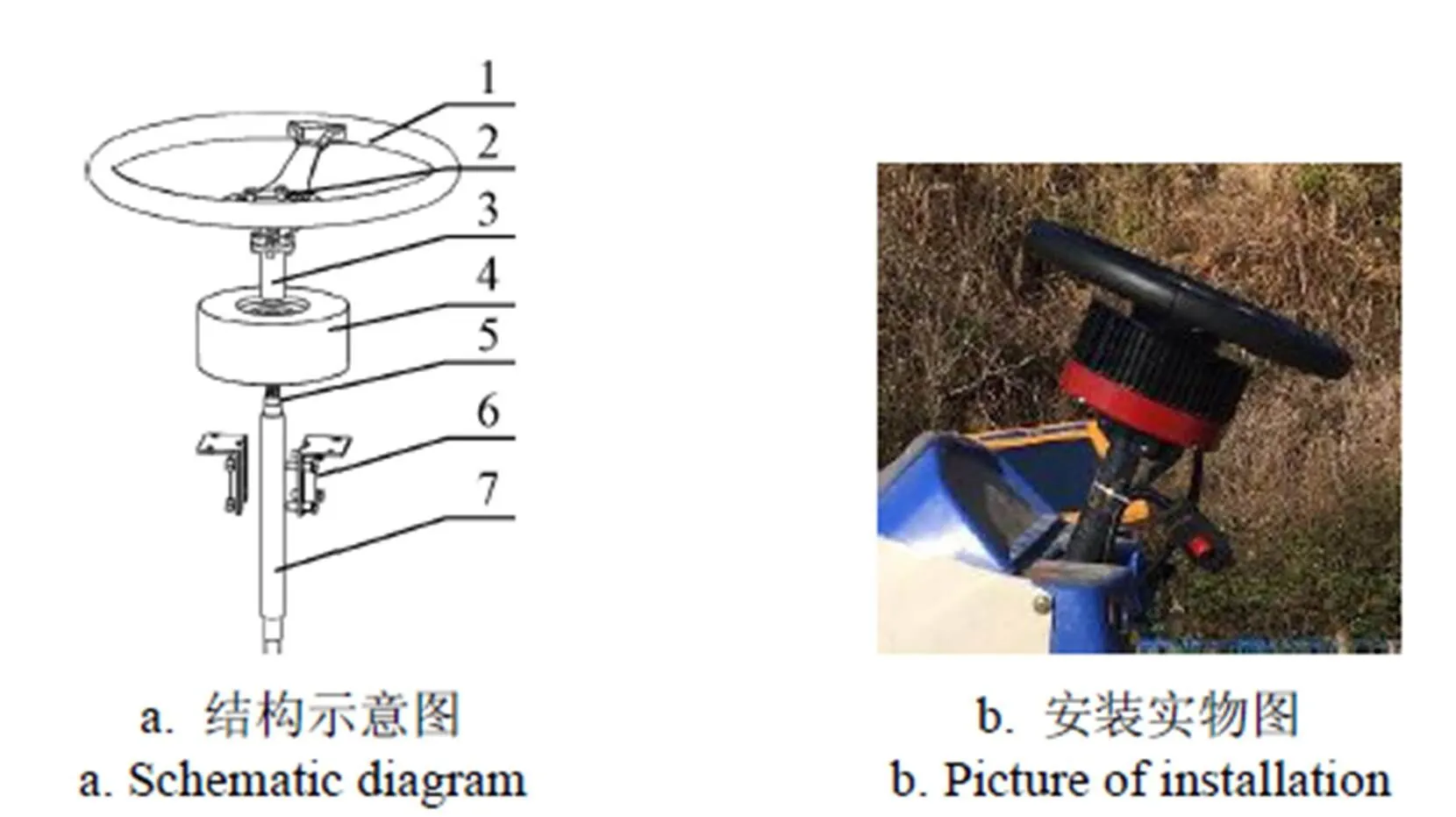
1.方向盤 2.固定螺釘 3.花鍵套 4.圓柱形電機 5.轉向柱 6.固定支架 7.轉向軸固定筒 1.Steering wheel 2.Fixing screw 3.Spline sleeve 4.Cylindrical motor 5.Steering shaft 6.Fixation apparatus 7.Steering shaft fixing cylinder
電動方向盤的結構分為固定部分和轉動部分,固定部分是圓柱形電機定子部分,通過固定支架安裝在插秧機的轉向軸固定筒上;轉動部分包括電機的轉子、方向盤以及花鍵套,其中花鍵套上部通過螺釘固定在轉子上,下端通過齒輪嚙合連接到插秧機的轉向柱上。
1.2 輪角傳感器
車輪轉角測量是自動導航系統(tǒng)轉向單元的重要組成部分,是影響轉向控制性能的重要環(huán)節(jié),也是影響導航精度的重要因素[20-22]。常用的車輪轉角測量方法有角度傳感器直接測量法、位移式間接轉角測量法、四連桿式間接轉角測量法以及陀螺儀間接測量法4種[23-27]。本文采用美國BEI公司的DUNCAN9360型號角度傳感器(12位霍爾式位置傳感器,具有2160°分辨率和±0.5%的線性度)間接測量方式獲取插秧機前輪轉角。
BEI角度傳感器安裝在插秧機的前輪轉向柱旋轉中心上方,如圖2所示。通過支撐板固定在機架上;BEI傳感器的旋轉軸通過支架連接在前輪上,間接測量前輪旋轉的角度。
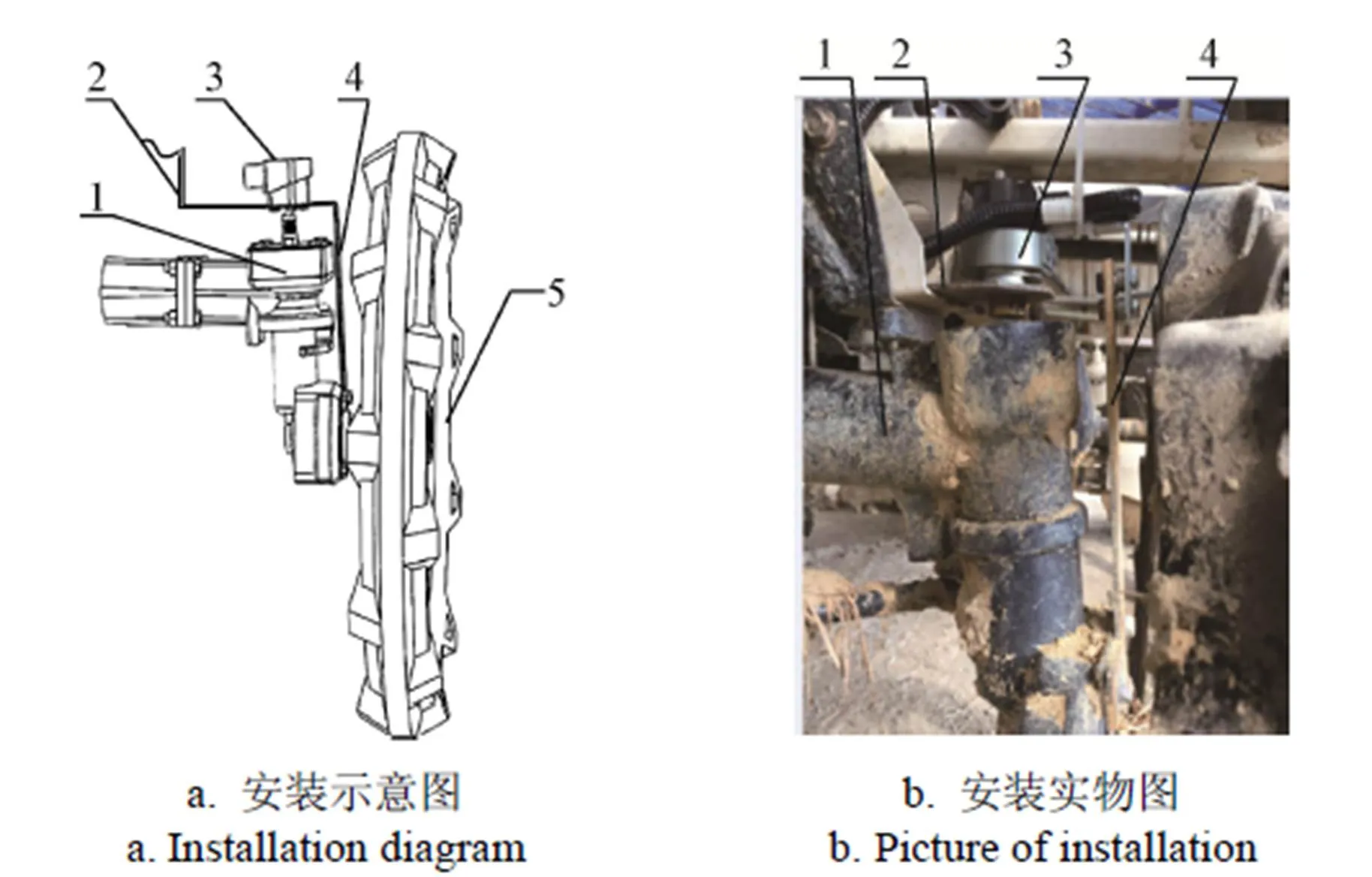
1.前輪轉向柱 2.固定支撐板 3.BEI角度傳感器 4.支架 5.前輪
1.3 轉向控制器
采用STW-2612型運動控制器作為轉向控制器[28],以實現與導航控制器通信、電動方向盤控制和輪角信息采集等功能。轉向系統(tǒng)控制框圖如圖3所示。STW-2612運動控制器具備2路CAN總線,26路輸入資源,配置靈活,使用方便;具有高防護等級、小體積、高集成度、高響應速度等優(yōu)點,適用于農田環(huán)境作業(yè)的農業(yè)機械的轉向控制。
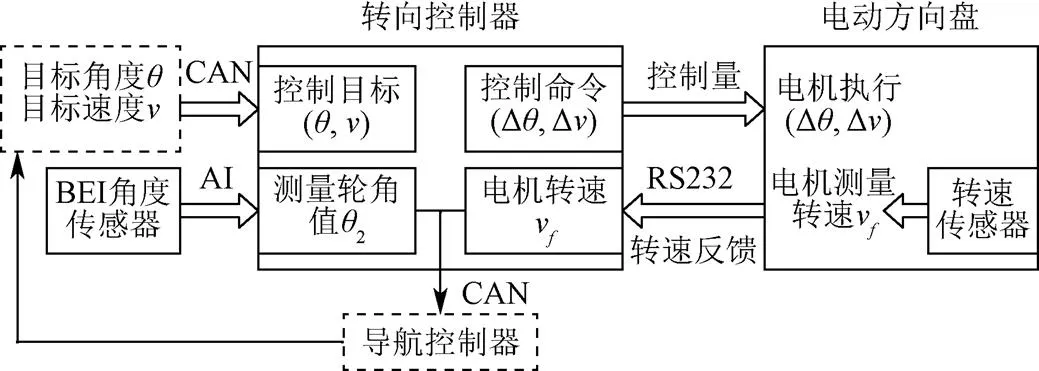
注:θ、v分別為目標角度和目標速度,由外部輸入;CAN為CAN總線,AI為模擬量輸入,θ2為傳感器測量得到的轉向輪角度,Δθ、Δv分別為角度控制量和速度控制量,vf為電機反饋的轉速。下同。
轉向控制器通過CAN總線獲得由導航控制器發(fā)送的目標角度和目標速度,通過轉向控制器運算和決策,得到電動方向盤的角度控制量Δ和速度控制量Δ,進行插秧機前輪轉向控制。電動方向盤自帶轉速傳感器,測量得到的轉速v經RS232總線傳送至轉向控制器;同時,BEI角度傳感器測量插秧機前輪轉向角度,信號輸入至轉向控制器的AI通道,獲得實際轉向角度2;轉向控制器將采集的前輪轉向角度2和轉速v經CAN總線送至導航控制器,形成嵌套閉環(huán)控制系統(tǒng)。
2 轉向系統(tǒng)控制算法
2.1 轉向系統(tǒng)模型
轉向系統(tǒng)模型如圖4所示。根據文獻[29-30],插秧機的轉向機構(含電動方向盤及液壓驅動部分)可看成一階慣性環(huán)節(jié)和純積分環(huán)節(jié)的組合,其傳遞函數如下

式中k為插秧機轉向系的增益;τ為插秧機轉向系的時間常數。
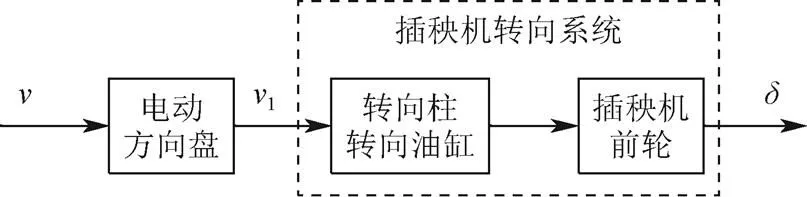
注:v為電動方向盤的目標速度,rad?s-1;v1為電動方向盤測量速度,rad?s-1;δ為插秧機前輪轉向的偏轉角度,(°)。
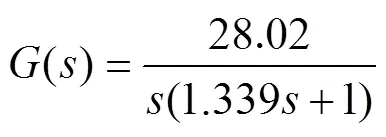
模型參數值可以通過辨識試驗測定。為此,先進行辨識試驗,架起插秧機前輪,使插秧機處于空載狀態(tài),施加脈沖控制信號控制插秧機前輪向左旋轉28°(限定插秧機最大轉角為[-28°,28°]),重復多次,獲取階躍響應。同樣,獲取插秧機前輪向右旋轉28°的階躍響應曲。采用MATLAB的System Identification工具箱,選擇傳遞函數估計模型進行辨識,結果如圖5所示。插秧機左右轉向階躍響應模型最佳適配系數(best fits)分別為91.07%和90.12%,表明辨識結果能準確反映插秧機轉向階躍特性。
通過MATLAB辨識得出模型參數k=28.02,轉向系模型參數τ=1.339,轉向系統(tǒng)的傳遞函數為
2.2 轉向控制算法設計
設計帶死區(qū)的嵌套控制算法,以實現在阻力大、黏附力大的水田環(huán)境下插秧機的轉向控制。
2.2.1 嵌套控制
嵌套控制回路是一種常見的控制結構。本文設計嵌套PID控制方法以實現電動方向盤的內環(huán)速度控制和外環(huán)角度控制,如圖6所示。
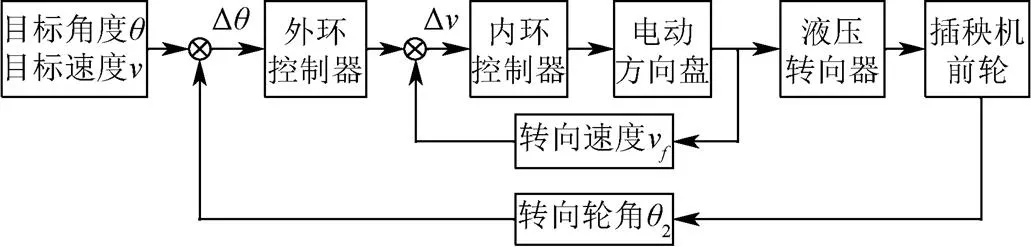
圖6 轉向控制系統(tǒng)總體結構圖
1)內環(huán)速度控制。如圖6所示,由位置式PID算法可得

式中K、K、K為速度PID控制的比例、積分和微分環(huán)節(jié)的系數。e為當前速度誤差,e1為-1時刻的速度誤差,∑e代表e以及之前的偏差的累積和(其中為1,2,….,)。
2)外環(huán)角度控制。角度環(huán)位于速度環(huán)的外層,負責保持轉向系位置,角度誤差為速度環(huán)提供速度要求。本文采用增量式PID前饋方法設計角度環(huán)的控制。
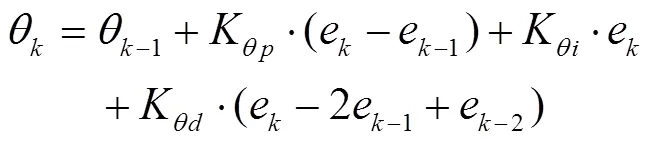
式中K、K、K為角度PID控制的比例、積分和微分環(huán)節(jié)的系數。e為當前角度誤差,e1為-1時刻的角度誤差,e2為-2時刻的角度誤差。
2.2.2 控制死區(qū)
由于插秧機轉向系統(tǒng)中各環(huán)節(jié)中存在間隙和自由行程等問題,導致PID控制算法在某一輸出控制量下電動方向盤旋轉但不能驅動插秧機前輪轉動。為實現準確穩(wěn)定的控制,減少電動方向盤的頻繁調節(jié),參考文獻[31],本文設定了死區(qū)雙閾值,限定方向盤電機在閾值范圍內不動作,認為PID算法執(zhí)行已經到達目標值。死區(qū)閾值的設置,一定程度上降低了控制的精度,但是提高了控制的穩(wěn)定性,減少了電機在目標值附近的振蕩。通過多次試驗取均值,確定了輪角控制死區(qū)的閾值,輪角順時針0.25°、逆時針0.3°以內為死區(qū)。
2.3 嵌套算法仿真
對上述插秧機轉向系統(tǒng)模型以及嵌套PID控制器,采用MATLAB的Simulink工具建立插秧機的轉向控制系統(tǒng)仿真框圖,如圖7所示。
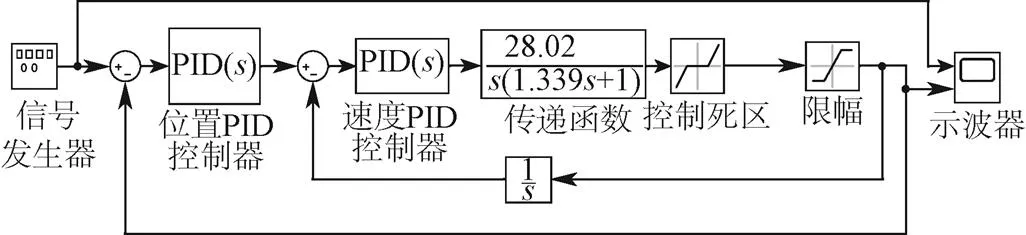
圖7 轉向控制系統(tǒng)仿真框圖
控制死區(qū)中起始死區(qū)(start of dead zone)設為0.25°,中止死區(qū)(end of dead zone)設為0.3°;內環(huán)速度PID參數和外環(huán)角度PID參數采用MATLAB的PID Tuner工具箱自動進行調試,具體參數如表2所示。
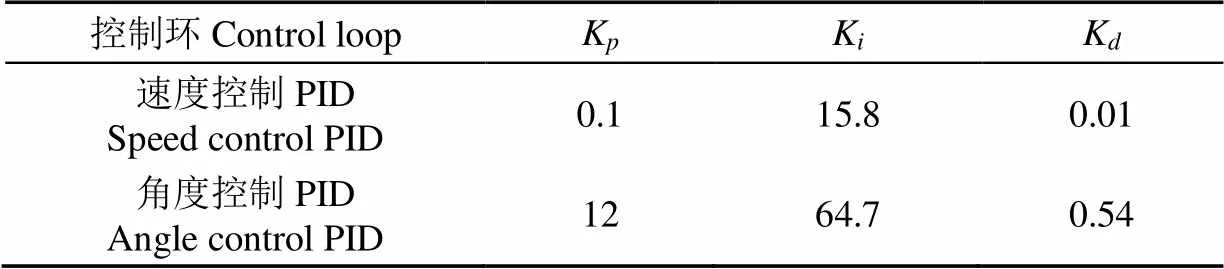
表2 轉向控制系統(tǒng)PID參數
注:KKK分別為比例、積分和微分環(huán)節(jié)的系數。
Note:K, KandKare proportional, integral and differential coefficients, respectively.
設計的電動方向盤作為插秧機導航的轉向驅動,航向角偏差多為小角度范圍調節(jié)[32],設定目標航向為10°,采用周期為20 s的方波信號和正弦波作為測試信號,仿真結果如圖8所示。
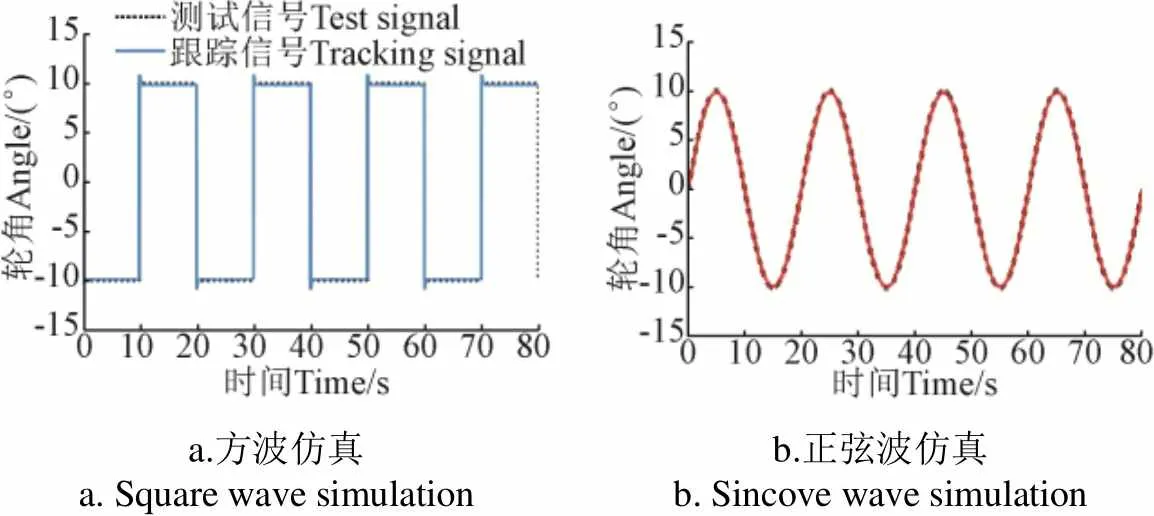
a.方波仿真b.正弦波仿真 a. Square wave simulationb. Sincove wave simulation
圖8a中方波信號跟蹤時系統(tǒng)最大超調為9.3%,死區(qū)控制效果良好,正負最大值在[9.75°, 10°]和[-10°, -9.7°]區(qū)間,可認為系統(tǒng)達到了目標值。圖8b中正弦轉向信號跟蹤延遲0.1 s,調節(jié)時間約0.1 s,轉向控制系統(tǒng)對正弦波信號跟蹤性能較好。仿真試驗結果表明,設計的控制系統(tǒng)具有較好的動態(tài)和穩(wěn)態(tài)響應,能夠為自動導航插秧機田間作業(yè)轉向控制提供理論基礎。
3 試驗與結果分析
3.1 試驗設計
為驗證電動方向盤轉向控制系統(tǒng)在水田作業(yè)機械上的適用性,在井關PZ-60型水稻插秧機平臺上集成電動方向盤和導航控制系統(tǒng)(包括雙天線差分系統(tǒng)、導航控制器和轉向控制系統(tǒng))進行試驗,如圖9所示。其中,導航控制器為試驗提供目標角度和目標速度,試驗數據由轉向控制器采集。
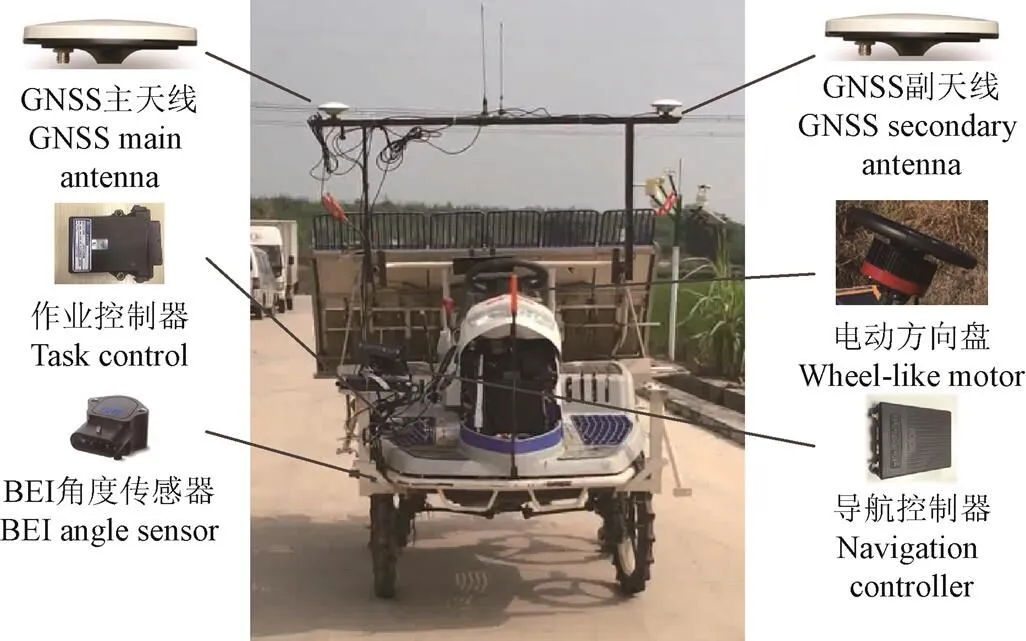
圖9 水稻插秧機轉向控制試驗平臺
根據水稻插秧機作業(yè)時轉向的特點,安排了3種試驗:
1)正弦波轉向跟蹤試驗:由于插秧機正常作業(yè)時轉向一般不會跳變,故采用正弦波信號在水泥路面考察電動方向盤的轉向跟蹤特性;
2)小角度控制性能試驗:在水田環(huán)境中(泥底層平坦水田和不平坦水田2種情況)控制插秧機自動導航直線行駛,通過轉向目標角度跟蹤效果,考察轉向控制系統(tǒng)的小角度控制性能;
3)大角度控制性能試驗:控制插秧機在田頭自動調頭,考察電動方向盤大角度轉向控制的性能。
正弦波轉向跟蹤試驗時,將插秧機置于空曠水泥路面,通過導航控制器給出信號頻率為0.05 Hz,角度幅值為 10°的正弦波進行電動方向盤的轉向跟蹤響應特性試驗;水田轉向性能試驗時,在導航控制系統(tǒng)上預先規(guī)劃插秧機的直線路徑,直線距離約40 m。插秧機從起始點開始進行直線行駛,同時記錄轉向控制目標角度和反饋角度等試驗數據。
3.2 正弦波轉向跟蹤試驗
根據試驗設計,插秧機以正弦波路徑行駛約40 s,試驗結果如圖10所示。正弦波跟蹤試驗結果表明:電動方向盤轉向控制系統(tǒng)可以很好地跟蹤控制信號,在峰值±10°附近稍有振蕩,最大跟蹤誤差為2.9°,平均絕對跟蹤誤差為0.301 5°,平均延時0.3 s,說明本文設計的基于電動方向盤的轉向控制系統(tǒng)具有較好的動態(tài)響應和控制穩(wěn)定性。
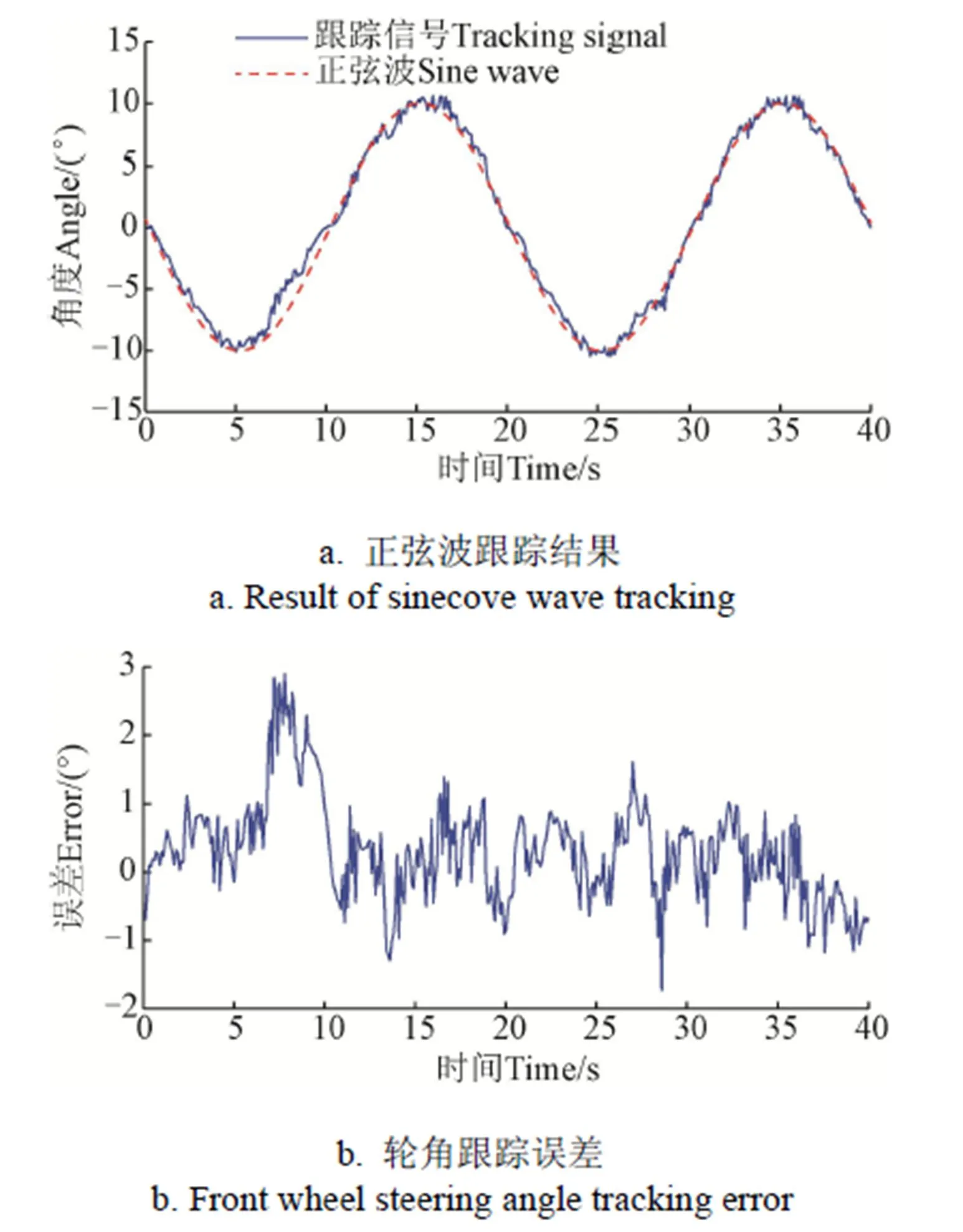
圖10 前輪轉角正弦波跟蹤試驗結果 Fig.10 Front wheel steering angle sine wave tracking test result
3.3 小角度轉向控制試驗
在華南農業(yè)大學增城試驗基地選擇一塊泥底層平坦(泥腳深約20 cm)和一塊泥底層坑洼不平、泥腳較深(深約40 cm)的水田,控制插秧機在2塊水田環(huán)境中以0.6 m/s的速度進行直線自動導航轉向目標角度跟蹤試驗,如圖 11所示。
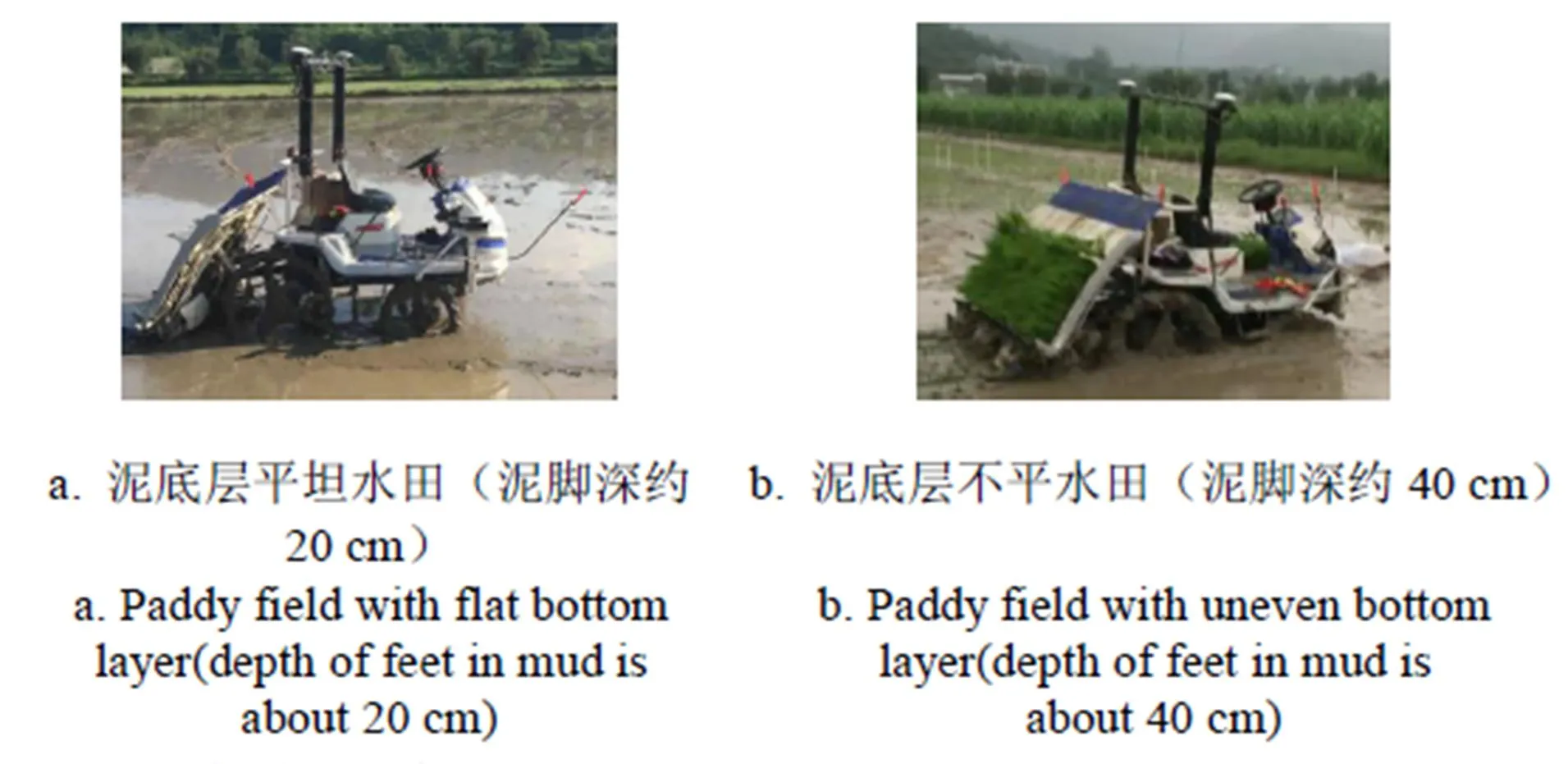
注:插秧機前進速度為0.6 m·s-1。
3.3.1 泥底層平坦的水田試驗
試驗開始時將插秧機從偏離起始點約0.4 m處開始行駛,測試轉向系統(tǒng)的上線跟蹤能力。試驗結果如圖12a、12b所示,在橫向偏差為0.4 m時,轉向控制系統(tǒng)延時0.6 s后以11°轉向角度開始上線,電動方向盤執(zhí)行10°輪角轉向耗時0.5 s;上線后跟蹤角度絕對值平均誤差約為0.354°,角度跟蹤偏差最大為1.4°。試驗結果表明,在工況較好的水田環(huán)境中,基于電動方向盤的轉向控制系統(tǒng)能很好地執(zhí)行控制指令,穩(wěn)定快速地驅動插秧機上線,過程平順振蕩小,控制穩(wěn)定性和控制精度良好。

圖12 泥底層平坦和不平坦水田中插秧機小角度轉向試驗結果 Fig.12 Small angle steering test results of transplanter in flat and uneven paddy field
3.3.2 泥底層不平坦的水田試驗
試驗開始時控制插秧機從起始點(泥腳深約40 cm)開始進行自動行駛。試驗結果如圖12c、12d所示,插秧機在深泥腳坑洼處角度跟蹤偏差最大為3.6°,響應延遲時間為1.4 s,輪角平均跟蹤絕對誤差為0.663°,平均延遲時間為0.6 s。試驗結果分析表明,在淤泥阻力大時,電動方向盤轉向控制響應稍有遲滯,隨著控制量持續(xù)增大,控制力矩增加,插秧機前輪開始執(zhí)行轉向動作,最終控制插秧機穩(wěn)定地跟蹤目標,表明本文設計的基于電動方向盤的轉向系統(tǒng)滿足插秧機水田轉向的力矩需求。
3.4 地頭轉向自動轉向試驗
為考察電動方向盤大角度轉向控制的性能,在泥底層平坦的水田中,控制插秧機在地頭自動調頭轉向。試驗結果如圖13所示,插秧機調頭時,輪角跟蹤有約0.6 s的延遲;執(zhí)行至最大轉向角(插秧機最大轉向角度設計為±28°),調節(jié)時間為2.5 s,穩(wěn)定后僅有微小超調與波動,穩(wěn)態(tài)誤差為0.6%。試驗結果表明,大角度轉向時,電動方向盤轉向控制快速穩(wěn)定,基本無超調和振蕩現象。

圖13 插秧機調頭試驗結果
4 結 論
本文以井關PZ-60型水稻插秧機為平臺,根據自動導航插秧機水田作業(yè)轉向控制的特點,設計了電動方向盤轉向控制系統(tǒng);構建了轉向系統(tǒng)的二階系統(tǒng)模型,采用MATLAB的System Identification 工具箱辨識出模型參數,插秧機左右轉向模型最佳適配系數分別為91.07%和90.12%。
1)設計了帶死區(qū)的嵌套控制算法,并構建了Simulink仿真模型,方波和正弦波仿真試驗結果表明:控制系統(tǒng)轉向信號跟蹤延遲0.1 s,調節(jié)時間約0.1 s,具有較好的動態(tài)和穩(wěn)態(tài)性能,驗證了控制算法的可行性。
2)分別進行了水泥路面轉向跟蹤(幅值10°的正弦波)、水田小角度轉向(直線行駛跟蹤)和水田大角度轉向(調頭轉向)系統(tǒng)性能試驗,結果表明,插秧機正弦波轉向角跟蹤平均絕對誤差為0.301 5°,平均延時0.3 s,轉向控制系統(tǒng)能很好地跟蹤控制信號;泥底層平坦與不平坦的水田中直線行駛時轉向輪角跟蹤的平均絕對誤差分別為0.354°和0.663°,平均延遲時間均為0.6 s,角度跟蹤偏差最大為1.4°和3.6°,深泥腳轉向阻力大時有1.4 s的控制滯后;插秧機在水田環(huán)境中調頭轉向時,執(zhí)行28°轉向角的調節(jié)時間為2.5 s,穩(wěn)定后僅有微小超調與波動,穩(wěn)態(tài)誤差為0.6%。3種不同的插秧機轉向試驗結果表明,基于電動方向盤的轉向控制系統(tǒng)具有良好的動態(tài)響應和控制穩(wěn)定性,適用于插秧機水田作業(yè)的自動轉向控制,滿足自動導航插秧機轉向控制要求。
[1] 張智剛,羅錫文,李俊嶺. 輪式農業(yè)機械自動轉向控制系統(tǒng)研究[J]. 農業(yè)工程學報,2005,21(11):77-80. Zhang Zhigang, Luo Xiwen, Li Junling. Automatic steering control system of wheeled model farming machinery[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(11): 77-80. (in Chinese with English abstract)
[2] 胡靜濤,高雷,白曉平,等. 農業(yè)機械自動導航技術研究進展[J]. 農業(yè)工程學報,2015,31(10):1-10. Hu Jingtao, Gao Lei, Bai Xiaoping, et al. Review of research on automatic guidance of agricultural vehicles[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 1-10. (in Chinese with English abstract)
[3] 王凡勛. 輪式農業(yè)機械自動轉向控制系統(tǒng)[J]. 農業(yè)工程,2018,8(4):36-38. Wang Fanxun. Automatic steering control of wheeled model farming machinery[J]. Agricultural Engineering, 2018,8(4): 36-38. (in Chinese with English abstract)
[4] 張長龍,李文春,馬蓉,等. 基于模糊PID自動轉向控制系統(tǒng)的研究[J]. 農機化研究, 2016,38(11):162-165,176. Zhang Zhanglong, Li Wenchun, Ma Rong, et al. Automatic steering control system research on fuzzy PID[J]. Journal of Agricultural Mechanization Research, 2016, 38(11): 162-165, 176. (in Chinese with English abstract)
[5] 魯植雄,刁秀永,龔佳慧,等. 輪式拖拉機線控液壓轉向系統(tǒng)路感特性與評價[J]. 農業(yè)工程學報,2015,31(12):57-63. Lu Zhixiong, Diao Xiuyong, Gong Jiahui, et al. Assessment and characteristic of road-feeling for wheeled tractor hydraulic steer-by-wire system[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(12): 57-63. (in Chinese with English abstract)
[6] 吳曉鵬,趙祚喜,張智剛,等. 東方紅拖拉機自動轉向控制系統(tǒng)設計[J]. 農業(yè)機械學報,2009,40(S1):1-5. Wu Xiaopeng, Zhao Zuoxi, Zhang Zhigang, et al. Development of automatic steering control system based on Dongfanghong tractor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(S1): 1-5. (in Chinese with English abstract)
[7] Zhang Q, Wu D, Reid J F, et al. Model recognition and validation for an off-road vehicle electrohydraulic steering controller[J]. Mechatronics, 2002, 12(6): 845-858.
[8] Zakaria Muhammad Aizzat, Zamzuri Hairi, Mazlan Saiful Amri, et al. Vehicle path tracking using future prediction steering control[J]. Procedia Engineering, 2012, 41: 473-479.
[9] 房素素,魯植雄,王增才,等. 拖拉機線控液壓轉向系統(tǒng)設計及樣車性能試驗[J]. 農業(yè)工程學報,2017,33(10):86-93. Fang Susu, Lu Zhixiong, Wang Zengcai, et al. Design and prototype performance experiments of steering-by-wire hydraulic pressure system of tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 86-93. (in Chinese with English abstract)
[10] 劉軍,袁俊,蔡駿宇,等. 基于GPS/INS和線控轉向的農業(yè)機械自動駕駛系統(tǒng)[J]. 農業(yè)工程學報,2016,32(1):46-53. Liu Jun, Yuan Jun, Cai Junyu, et al. Autopilot system of agricultural vehicles based on GPS/INS and steer-by-wire[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(1): 46-53. (in Chinese with English abstract)
[11] 陳文良,謝斌,宋正河,等. 拖拉機電控液壓動力轉向控制系統(tǒng)的研究[J]. 農業(yè)工程學報,2006,22(10):122-125. Chen Wenliang, Xie Bin, Song Zhenghe, et al. Electro-hydraulic power steering system for tractors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(10): 122-125. (in Chinese with English abstract)
[12] 魏爽,李世超,張漫,等. 基于GNSS的農機自動導航路徑搜索及轉向控制[J]. 農業(yè)工程學報,2017,33(增刊1):70-77. Wei Shuang, Li Shichao, Zhang Man, et al. Automatic navigation path search and turning control of agricultural machinery based on GNSS[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(Supp. 1): 70-77. (in Chinese with English abstract)
[13] 劉進一. 基于速度自適應的拖拉機自動導航控制系統(tǒng)研究[D]. 北京:中國農業(yè)大學,2017. Liu Jinyi. Research on Automatic Navigation Control System of Tractor Based on Speed Adaptation[D]. Beijing: China Agricultural University, 2017. (in Chinese with English abstract)
[14] 張智剛,王進,朱金光,等. 我國農業(yè)機械自動駕駛系統(tǒng)研究進展[J]. 農業(yè)工程技術,2018(18):23-27. Zhang Zhigang, Wang Jin, Zhu Jinguang, et al. Review of research on automatic driving system of agricultural vehicles in China[J]. Agricultural Engineering Technology, 2018(18): 23-27. (in Chinese with English abstract)
[15] 印祥,劉崗微,楊騰祥,等. 高速插秧機自動轉向系統(tǒng)研制[J]. 農機化研究,2019,41(1):153-157. Yin Xiang, Liu Gangwei, Yang Tengxiang, et al. Development of automatic steering system for high speed rice transplanter[J]. Journal of Agricultural Mechanization Research, 2019, 41(1): 153-157. (in Chinese with English abstract)
[16] 王宇. 插秧機自動導航控制系統(tǒng)的設計與研究[D]. 杭州:浙江理工大學,2017. Wang Yu. Design and Research of Automatic Navigation Control System for Transplanter[D]. Hangzhou: Zhejiang Sci-Tech University, 2017. (in Chinese with English abstract)
[17] 張聞宇,丁幼春,王磊,等. 拖拉機自動導航摩擦輪式轉向驅動系統(tǒng)設計與試驗[J]. 農業(yè)機械學報,2017,48(6):32-40. Zhang Wenyu, Ding Youchun, Wang Lei, et al. Design and experiment on automatic steering control system of friction drive for tractor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(6): 32-40. (in Chinese with English abstract)
[18] 靳俊棟,趙祚喜,黃培奎,等. 約翰迪爾AutoTrac自動導航系統(tǒng)通用性應用研究[J]. 農業(yè)機械學報,2015,46(S1):15-20. Jin Jundong, Zhao Zuoxi, Huang Peikui, et al. Applied research on John Deere AutoTrac automatic navigation's versatility[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(S1): 15-20. (in Chinese with English abstract)
[19] 黃培奎,趙祚喜,靳俊棟,等. 基于AutoTrac的導航控制參數整定方法試驗[J]. 農業(yè)工程學報,2015,31(增刊2):100-106. Huang Peikui, Zhao Zuoxi, Jin Jundong, et al. Navigation control parameter tuning method based on AutoTrac[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31 (Supp. 2): 100-106. (in Chinese with English abstract)
[20] 楊柳,羅婷婷,程新榮,等. 基于Raspberry Pi的拖拉機通用自動駕駛系統(tǒng)[J]. 農業(yè)工程學報,2015,31(21):109-115. Yang Liu, Luo Tingting, Cheng Xinrong, et al. Universal autopilot system of tractor based on Raspberry Pi[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 109-115. (in Chinese with English abstract)
[21] 籍穎,張漫,劉剛,等. 農業(yè)機械導航系統(tǒng)綜合評價方法[J]. 農業(yè)機械學報,2010,41(12):160-164. Ji Ying, Zhang Man, Liu Gang, et al. Synthetically evaluation of agriculture machine navigation system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 160-164. (in Chinese with English abstract)
[22] Yin Chengqiang, Sun Qun, Wu Jian, et al. Development of electrohydraulic steering control system for tractor automatic navigation[J]. Journal of Electrical and Computer Engineering, 2018, 2018: 1-7. doi.olg/10.1155/2018/5617253.
[23] 胡書鵬,尚業(yè)華,劉卉,等. 拖拉機轉向輪轉角位移式和四連桿式間接測量方法對比試驗[J]. 農業(yè)工程學報,2017,33(4):76-82. Hu Shupeng, Shang Yehua, Liu Hui, et al. Comparative test between displacement and four-bar indirect measurement methods for tractor guide wheel angle[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2017, 33(4): 76-82. (in Chinese with English abstract)
[24] 王朝陽. 基于陀螺儀的車輛前輪轉角測量方法研究[D]. 上海:上海工程技術大學,2016. Wang Chaoyang. Research on the Vehicle Front Whell Angle Measurement Based on the Gyroscope[D]. Shanghai: Shanghai University Of Engineering Science, 2016. (in Chinese with English abstract)
[25] 繆存孝,楚煥鑫,孫志輝,等. 基于雙GNSS天線及單陀螺的車輪轉角測量系統(tǒng)[J]. 農業(yè)機械學報,2017,48(9):17-23. Miao Cunxiao, Chu Huanxin, Sun Zhihui, et al. Wheel turning angle measurement system based on double GNSS antennas and single Gyro[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9): 17-23. (in Chinese with English abstract)
[26] D·E·布里維,G·W·懷特,J·W·派科.基于轉向組件角度及角速率傳感器的車輛陀螺儀:CN 101326094 B[P]. 2011-09-21.
[27] Brewer Douglas E. Vehicle gyro based steering assembly angle and angular rate sensor: CA, 20070088477[P]. 2009-09-13.
[28] SonnePower electronics & Mobile controller[EB/OL]. http://www. csshuobo. com/ProductDetail-I50. html
[29] 李逃昌. 基于級聯式控制策略的農業(yè)機械自動導航控制方法研究[D]. 北京:中國科學院大學,2014. Li Taochang. Research on Automatic Navigation Control Method Based on Cascaded Control Strategy for Agricultural Machinery[D]. Beijing: University of Chinese Academy of Sciences, 2014. (in Chinese with English abstract)
[30] Zhang Q, Wu D, Reid J F, et al. Model recognition and validation for an off-road vehicle electrohydraulic steering controller[J]. Mechatronics, 2002, 12(6): 845-858.
[31] 胡煉,羅錫文,趙祚喜,等. 插秧機電控操作機構和控制算法設計[J]. 農業(yè)工程學報,2009,25(4):118-122. Hu Lian, Luo Xiwen, Zhao Zuoxi, et al. Design of electronic control device and control algorithm for rice transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(4): 118-122. (in Chinese with English abstract)
[32] 張碩,劉進一,杜岳峰,等. 基于速度自適應的拖拉機自動導航控制方法[J]. 農業(yè)工程學報,2017,33(23):48-55. Zhang Shuo, Liu Jinyi, Du Yuefeng, et al. Method on automatic navigation control of tractor based on speed adaptation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 48-55. (in Chinese with English abstract)
Design of steering control system for rice transplanter equipped with steering wheel-like motor
He Jie1, Zhu Jinguang2※, Luo Xiwen1, Zhang Zhigang1, Hu Lian1, Gao Yang2
(1.,,,510642,; 2..,,261200,
The steering wheel-like motor has been used as steering control mechanism for agricultural machinery navigation systems integrated in small and medium-sized dryland tractors, but it’s adaptability for large-power paddy agricultural machinery or other agricultural machinery with large steering damping remains to be studied. Taking Iseki PZ-60 rice transplanter as the research objective, the steering control system based on steering wheel-like motor is designed in accordance with the steering control characteristic of the automatic navigation rice transplanter working in paddy field. The steering system is composed of steering wheel-like motor, steering controller and wheel angle sensor. The steering system model based on system in series with first-order inertia and integral system is identified in Matlab. First a step signal is applied to the front wheels while the transplanter is lift and with no-load, then the step responses of the steering angle are obtained for 28° to left and 28° right; Afterwards, the model parametersare identified by the MATLAB System Identification toolbox, which turns out that the best fit coefficient of the model (best fits) are 91.07% and 90.12%. A nested control algorithm with dead zone is designed. The inner loop of the algorithm is a PID speed control loop, and the outer loop is an incremental PID angle control loop. Given the control disturbance generated by the gap, free stroke and other nonlinearity in the steering system, the disturbance is regarded as the control dead zone, whose threshold have been tested and integrated into the control algorithm. Simulation del of the system is constructed by MATLAB/Simulink, and the simulation tests are carried out by using square wave and sine wave signals. The results show that tracking delay and adjustment time of the simulated model are about 0.1 s and 0.1 s respectively which indicates that the control system has a good steady-state performance. In other words, the feasibility of the control algorithm is verified. In order to verify the practical performance and control accuracy of the steering control system, the automatic navigation transplanter (including dual antenna differential GNSS system, the navigation controller and the steering control system mentioned above) is adopted to test in the Zengcheng Experimental Base of South China Agricultural University. Three verification tests are carried out on the developed automatic navigating transplanter. The steering signals to be performed in paddy field are sinusoid with amplitude of 10°, small-angle for testing tracking straight line and wide-angle for testing turning round. The results illustrate that the average absolute error (AAE) of sinusoidal signal tracking is 0.301 5° and average delay is 0.3 s; the AAE of straight-line tracking in paddy field conducted on flat and uneven bottom layer are 0.354° and 0.663° respectively, and maximum error of which are 1.4° and 3.6°, respectively with presence of 0.6 s delay; the delay goes up to 1.4 s when transplanter are driven into area with relatively deep mud; the settling time and steady-state error are 2.5 s and 0.6% respectively during the process of tracking a turning signal with 28° steering angle. Three experiments illustrate that the steering system developed for the rice transplanter based on the steering wheel-like motor has good dynamic response and control stability which can be applied to the automatic steering control of the rice transplanter in paddy fields and satisfies operation requirements of automatic navigation for rice transplanter.
agriculture machinery; navigation; control; steering wheel-like motor; rice transplanter; steering control; nested control algorithm; system identification
2019-01-06
2019-02-25
國家重點研發(fā)計劃項目(2017YFD0700404);廣東省科技計劃項目(2016B020205003)
何杰,實驗師,博士生,主要從事農業(yè)機械導航研究。Email:hooget@scau.edu.cn
朱金光,研究員,主要從事智能農業(yè)裝備研究。Email:zhujinguang@lovol.com
10.11975/j.issn.1002-6819.2019.06.002
S24;S237
A
1002-6819(2019)-06-0010-08
何 杰,朱金光,羅錫文,張智剛,胡 煉,高 陽. 電動方向盤插秧機轉向控制系統(tǒng)設計[J]. 農業(yè)工程學報,2019,35(6):10-17. doi:10.11975/j.issn.1002-6819.2019.06.002 http://www.tcsae.org
He Jie, Zhu Jinguang, Luo Xiwen, Zhang Zhigang, Hu Lian, Gao Yang. Design of steering control system for rice transplanter equipped with steering wheel-like motor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(6): 10-17. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.06.002 http://www.tcsae.org
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32