基于小波神經網絡的旋耕裝置機械故障診斷研究
2019-05-24 10:01:26郭慶軍
農機化研究 2019年9期
郭慶軍
(重慶建筑工程職業學院,重慶 400072)
0 引言
旋耕裝置是現代農業機械中普及的農業裝備,一般以柴油機為動力,具有質量輕、體積小及結構簡單等特點,深受現代農業朋友們的青睞。但是,在生產中,常常會因為各類機械故障發現不及時,影響正常的農業種植任務。因此,及時準確地發現機械中的故障,對提高作業效率具有一定的現實意義。為了解決上述問題,利用小波神經網絡技術,設計了一套旋耕裝置機械故障診斷系統。
1 小波變換在故障分析中的實際應用
1.1 小波變換原理
小波變換是一種具有震蕩周期性、可以立刻衰減至零的函數,可以精準地判斷波形中哪一個長周期的振動最強。由基本小波φ(t)分別通過伸縮因子a與平移因子b得到的函數族{φa,b}稱之為小波分析,即
(1)
其中,a、b為實數;|a|-1/2則實現伸縮與平移中能量的規一化。
在實際應用中,信號f的某一時間內連續小波變換的計算式為
(2)
若φ為符合要求的小波時,根據式(2)的小波變
換在f(t)的逆變換為
(3)

(4)
任意函數f(t)的離散小波定義為

(5)
1.2 小波變換在故障分析中的實際應用
本文在MatLab中構建一段旋耕裝置機械故障信號,信號主要包含正常的200Hz信號和突變的300Hz的信號。通過采用小波變換方法闡述其在旋耕裝置機械中的故障檢測。旋耕裝置機械故障信號如圖1所示,從中很難發現故障發生時間和細節。
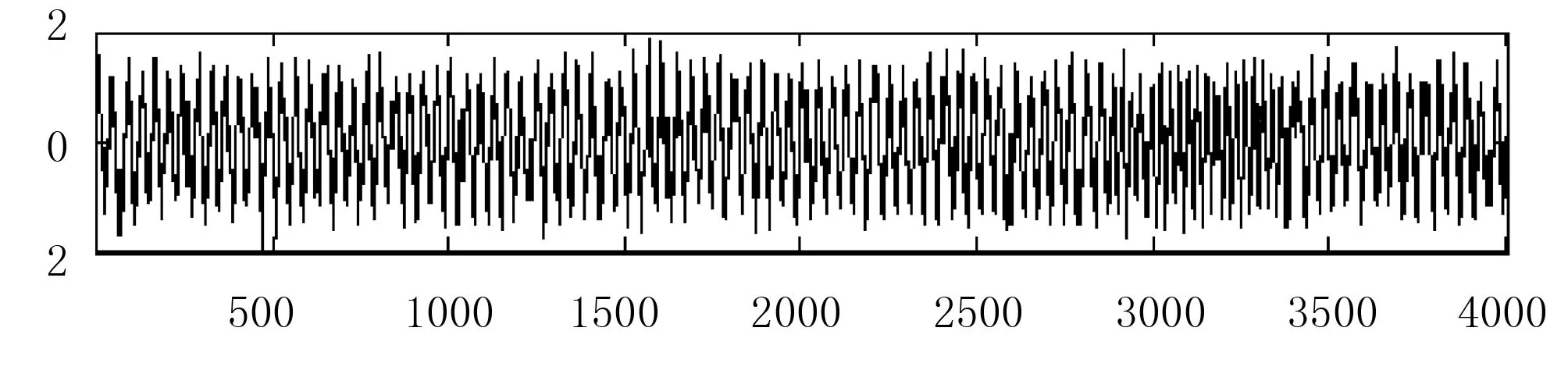
圖1 旋耕裝置機械故障信號Fig.1 The mechanical fault signal of rotary tillage unit
采用傳統的FFT只能看出信號在3 200ms左右發生了突變,卻不能發現時域信號在發生故障時變化趨勢,達不到分析要求。
采用層次尺度為4的小波變換分析旋耕裝置機械故障信號,結果如圖2所示。旋耕裝置機械故障信號經過小波變換處理后,在第4層時,已實現了突變信號的分離,低頻部分(a4)突變信號消失,而高頻部分(d4)對應的正是突變信號,可以準確地推斷出故障發生時間和細節。仿真結果證明:在旋耕裝置機械故障信號診斷中,采用小波變換的頻帶濾波方法,能夠從復雜噪聲信號中分離出故障信號,為故障診斷提供了有力依據。
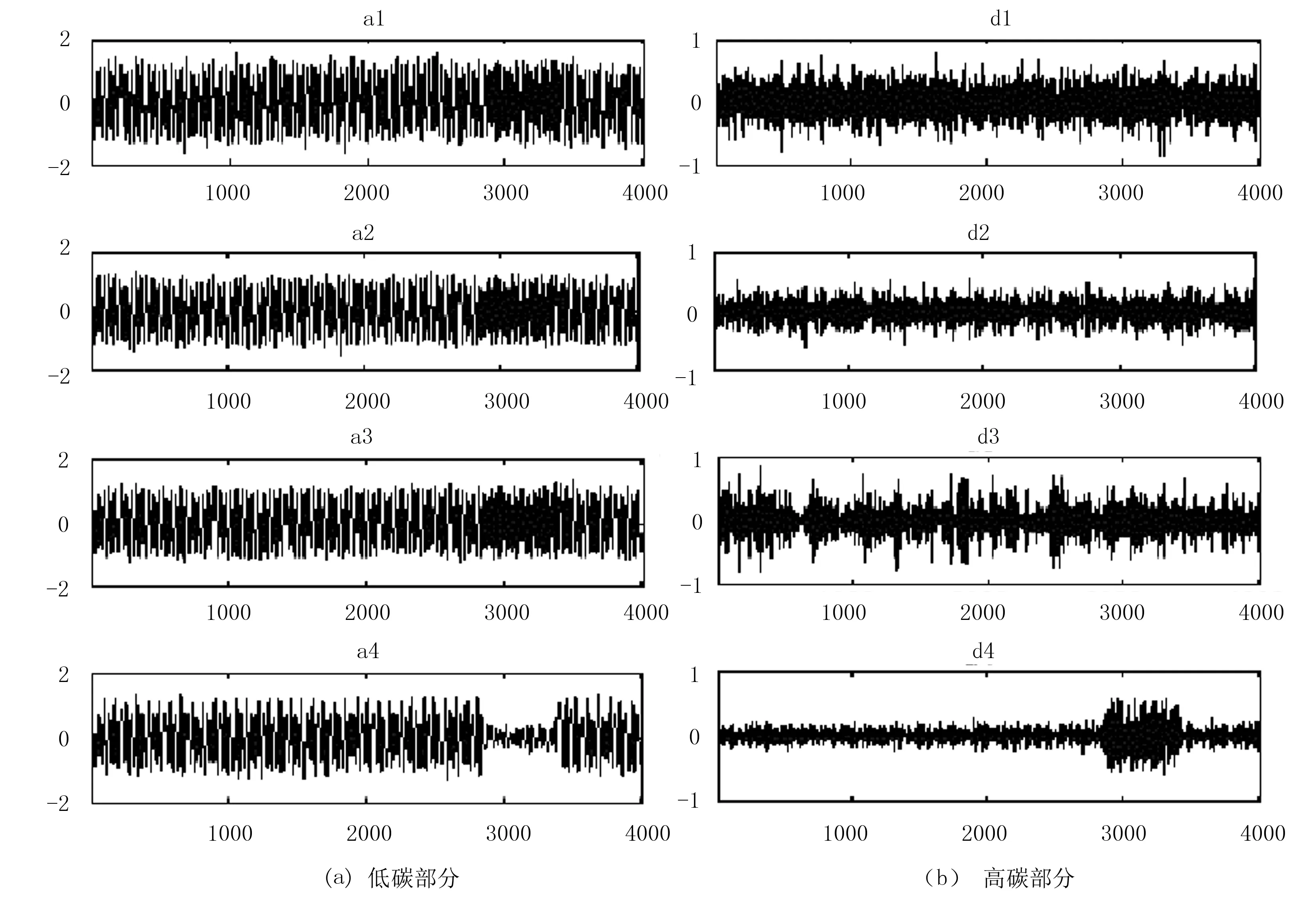
圖2 小波變換分析Fig.2 The wavelet transform analysis
2 構造旋耕裝置機械故障診斷的小波神經網絡
本文采用3層小波神經網絡模型。其中,輸入層包含10個節點數;網絡隱含層采用Morlet函數,共包含15個節點數;輸出層的神經元數目共包含15個節點數。最后,構造旋耕裝置機械故障診斷的小波神經網絡結構如圖3所示。
圖3 小波神經網絡結構示意圖Fig.3 The structure schematic diagram of wavelet neural network
小波神經網絡的神經元,是進行信息處理分析最關鍵的基本單元,其神經元結構如圖4所示。
圖4中,Pn為小波神經網絡的輸入參數;wn為小波神經網絡輸入層與隱含層的權值;H(x)為小波激發函數;v為神經元的閾值;y為神經元的輸出結果。神經元的網絡輸出為
y=∑wnPn+v
(6)
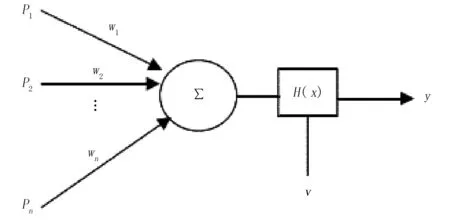
圖4 小波神經網絡神經元結構圖Fig.4 The neuron structure diagram of wavelet neural network
3 旋耕裝置機械故障診斷模型建立
3.1 建立旋耕裝置故障特征
經過大量的試驗,建立了旋耕裝置機械故障與征兆對應的表,如表1所示。研究中主要對不平衡、負荷過大、異常響動、犁刀軸不轉動、脫檔、萬向節軸承脫落及刀片彎曲等7種故障做出小波神經網絡的輸出;利用振動信號的8個不同頻率的譜峰能量值作為旋耕裝置機械特定的故障特征,并制定出如表2所示的訓練樣本。

表1 旋耕裝置機械故障與征兆對應表Table 1 The correspondingTable of mechanical failure and symptom of rotary tillage unit
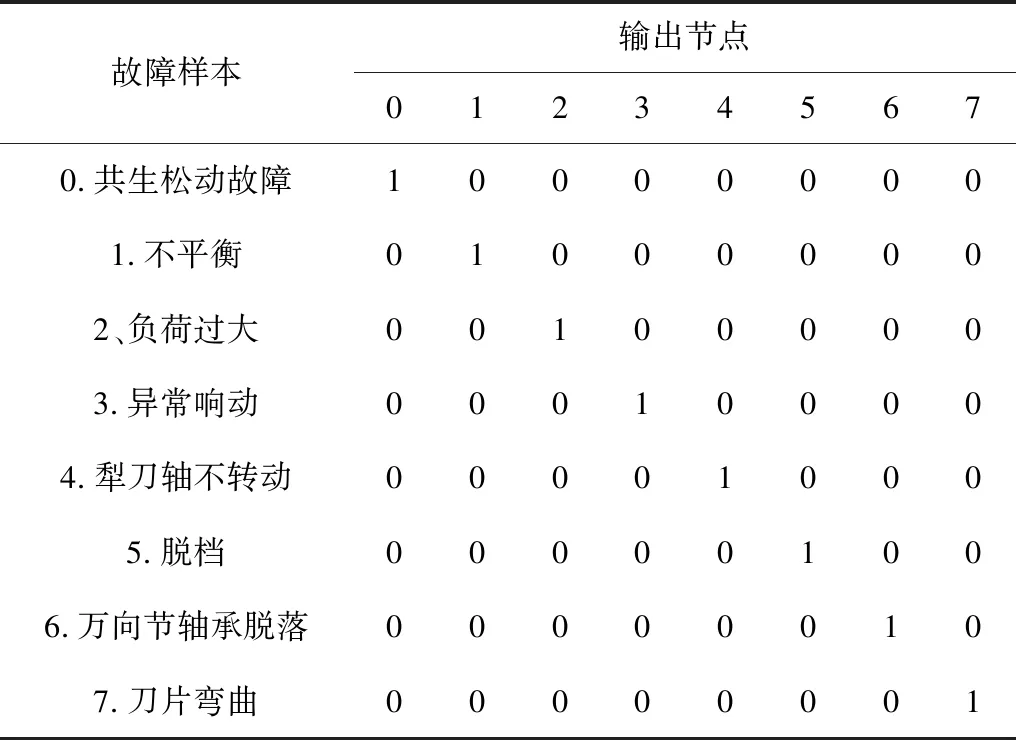
表2 訓練樣本的目標輸出Table 2 The target output of training samples
3.2 提取特征向量
為了比較方便地提取旋耕裝置機械故障的特征向量,本文將多分辨率分析應用到功率譜的特征提取上。具體的實現方法如下:
1)設定旋耕裝置的振動信號采樣為1 024點,頻率為12.8f,其中f為工頻;
2)計算旋耕裝置的振動信號功率譜(頻率分布在0~6.4f之間);
3)采用4層小波分解振動信號功率譜,最終提取第4層分解的逼近部分(頻率間隔為0.1f);
4)參照表1,在8個功率譜段中提取特征向量x(n),n=0,1,…,7,最后進行歸一化處理分析。
3.3 建立小波神經網絡模型
根據前文的研究與分析,本文選用3層的小波神經網絡,輸入層單元數為8,對應旋耕裝置機械故障的8個頻率特征量,輸出層單元數為8,對應9種旋耕裝置機械故障,隱層單元數為8。小波神經網絡結構如圖5所示。
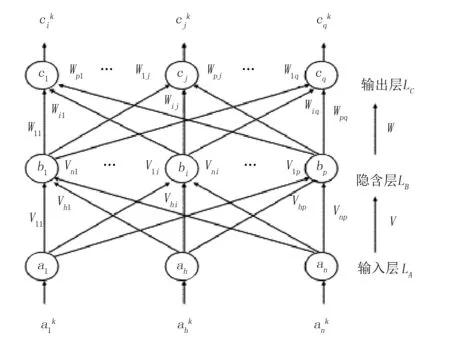
圖5 小波神經網絡結構圖Fig.5 The structure diagram of wavelet neural network
假設不包含輸入層,其有N0個元,設某網絡有L層,輸出為第L層,第L層有NK個元;uk(i)為第K層第i神經元采集到的信息;wk(i,j)為從第k-1層第j個元到第k層第i個元的權;ak(i)為第k層第i個元的輸出,各層之間的神經元都有信息交換。則其輸入輸出關系可以表示為
(7)
神經網絡算法的步驟為:
Step1:設定學習的輸入數據,p=1,…,p,確定初始權矩陣W(0);
Step2:用學習數據計算網絡輸出;
Step3:用式(2)反向修正,直到用完所有學習數據。
3.4 小波神經網絡模型的訓練
采用梯度下降法對應用于旋耕裝置機械故障的小波神經網絡進行訓練,經過3 000次訓練后得到了訓練目標,實際計算出的網絡誤差為3.905 8×10-5。樣本訓練的輸出結果如表3所示。
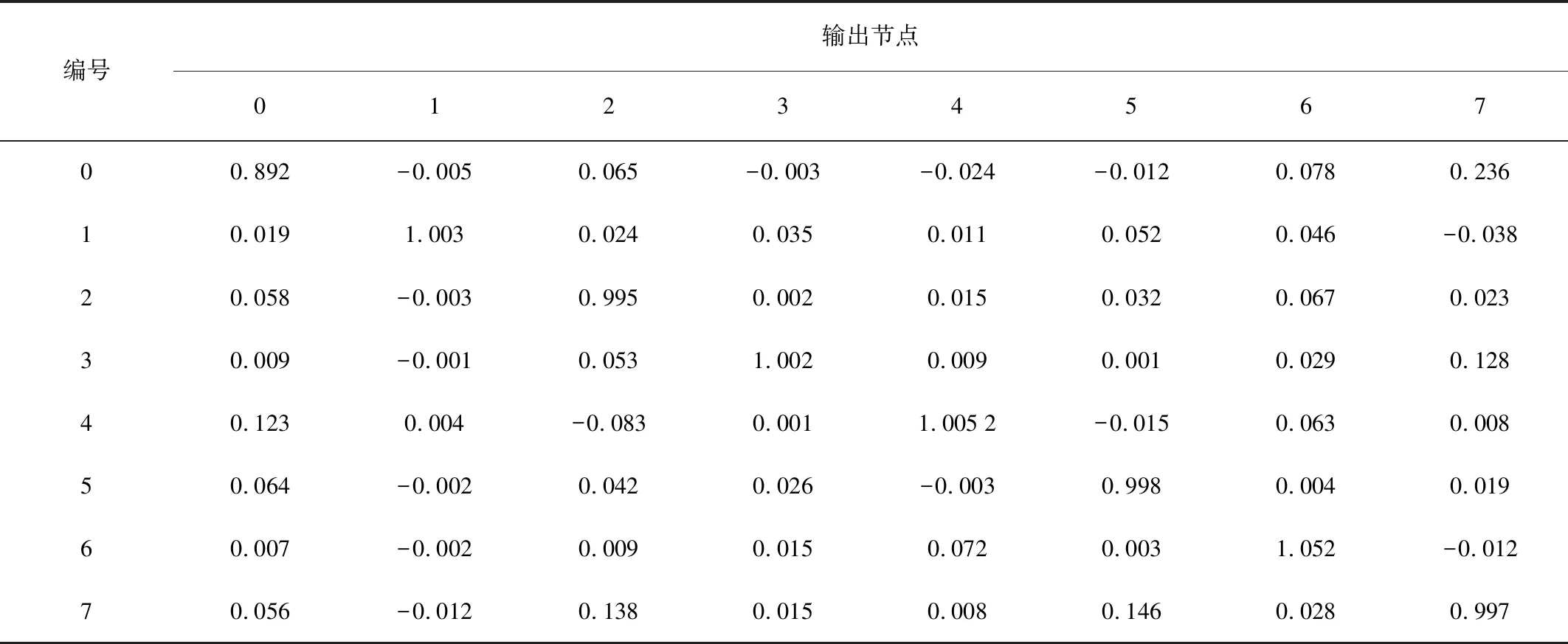
表3 樣本訓練的輸出結果Table 3 The output results of sample training
4 故障診斷模型的驗證與分析
為了驗證旋耕裝置機械故障診斷模型可行性和準確性,采用MatLab仿真軟件訓練和測試小波神經網絡模型。試驗中,從旋耕裝置機械平臺中采集到了其在共生松動故障時的機械振動信號樣本(見圖6中的原始信號),試驗驗證結果如表4和表5所示。
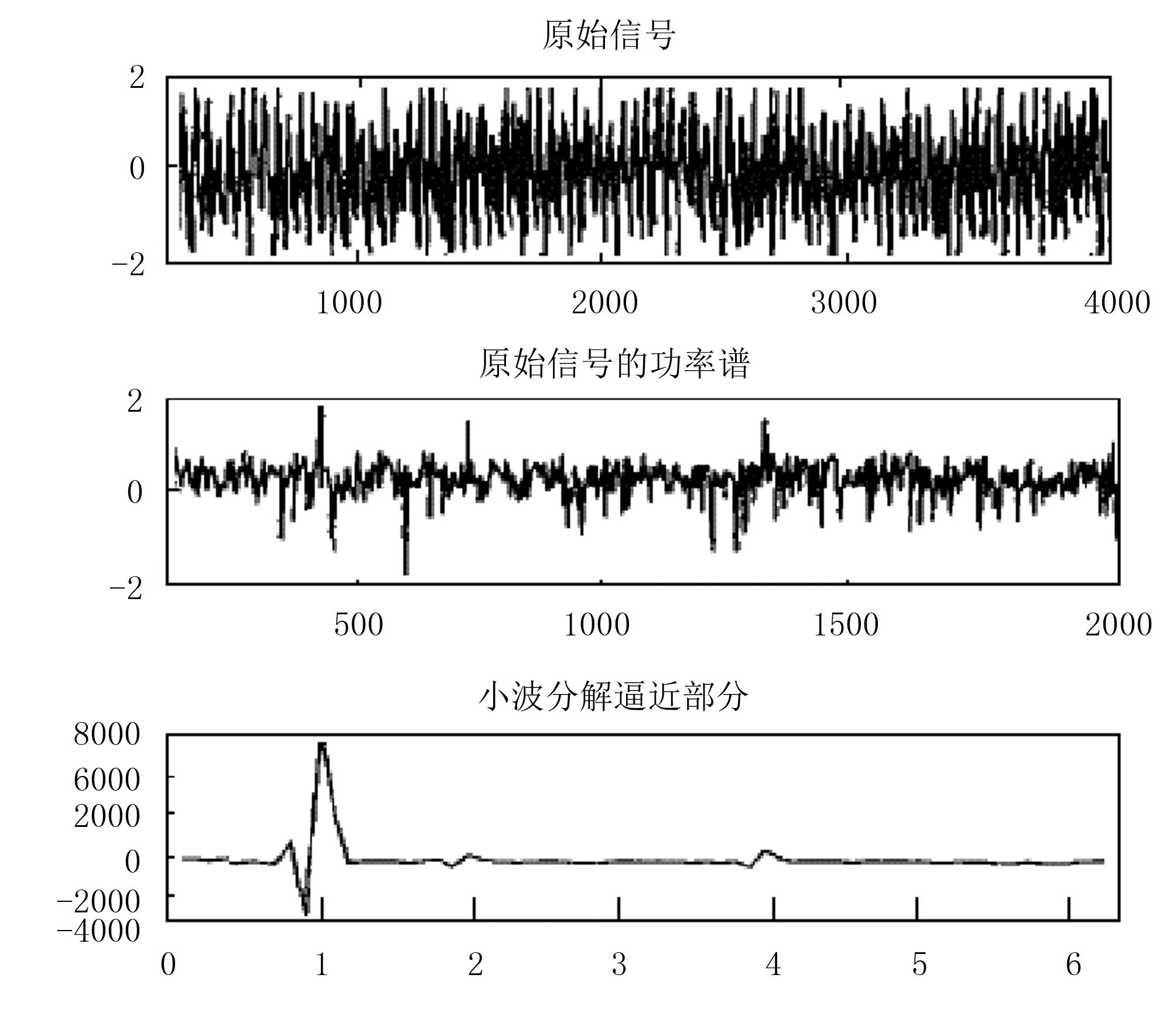
圖6 旋耕裝置機械故障診斷模型的驗證結果Fig.6 The verification result of mechanical fault diagnosis model for rotary tiller
圖6中:上圖為機械振動信號的原始樣本,中圖為原始樣本的功率譜,下圖為小波神經網絡的4層分解逼近部分。
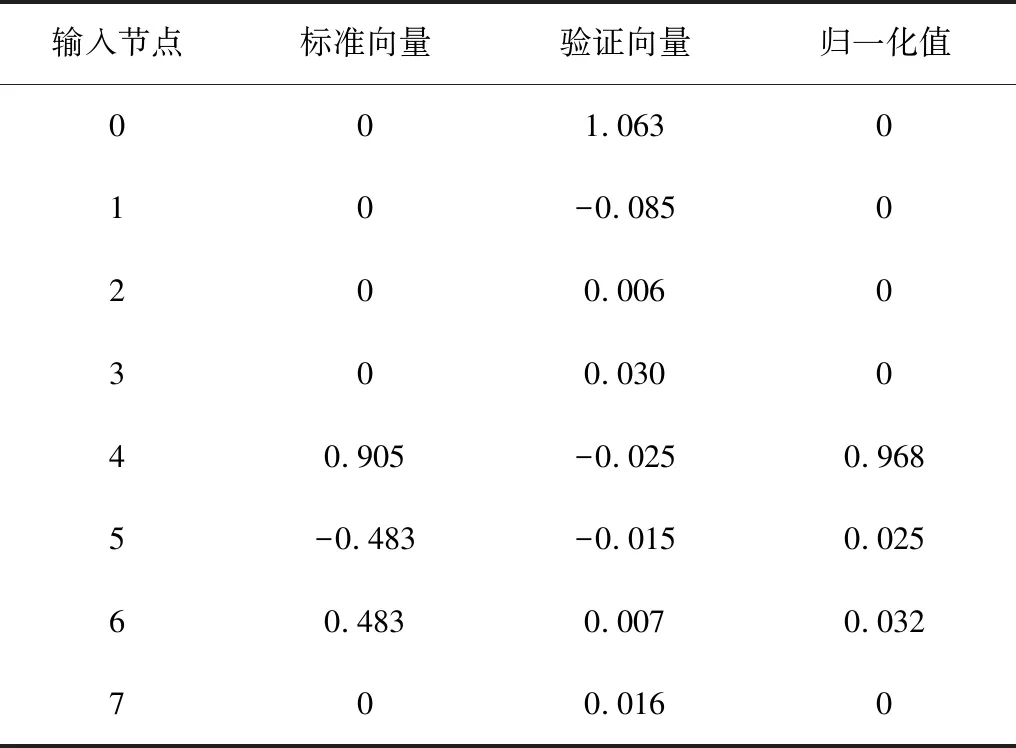
表4 樣本的網絡輸入Table 4 The sample network input

表5 樣本的網絡輸出Table 5 The sample network output
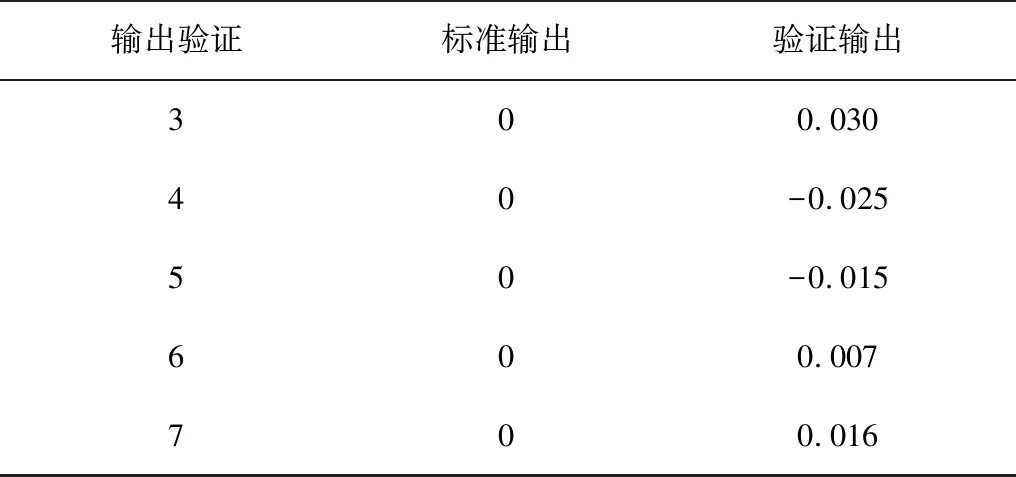
續表5
從驗證結果可以看出:小波神經網絡通過樣本學習,可以對旋耕裝置機械故障數據進行“誤差逼近”檢驗,能夠確定故障數據最為“逼近”的樣本故障信息。其中,待檢故障信號第0個節點輸出值為1.063,其他節點值的絕對值均未超過0.030,診斷結果表明旋耕裝置為共生松動故障,與實際故障吻合。試驗表明:小波神經網絡具有“泛化”能力,能夠準確檢測旋耕裝置的機械故障,可以為設備維護人員提供重要的參考。
5 結論
將小波變化和神經網絡算法相結合,利用小波神經網絡和Morlet函數算法,作為旋耕裝置機械故障特征信號的采集方法,通過建立旋耕裝置故障特征和提取其特征向量,實現了對旋耕裝置機械故障的實時診斷。通過對旋耕裝置機械故障診斷模型的驗證與分析,可以得出:該診斷方法具有“泛化”能力,能夠準確檢測旋耕裝置的機械故障,可以為設備維護人員提供重要的參考。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21