農用拖拉機牽引裝置智能化測試與改進
2019-05-24 09:53:44向承翔
農機化研究 2019年9期
向承翔
(重慶三峽職業學院,重慶 404155)
0 引言
作為一種常用的動力機械,農用拖拉機在田間作業和運輸作業領域得到廣泛而有效的應用,其主要功能是實現牽引和驅動各種農業機械完成工作。圖1為農用拖拉機進行牽引作業的過程簡圖。由圖1可知:在發動機提供源動力的基礎上,四輪驅動系統通過牽引力的傳遞帶動附加機具跟隨運動。隨著國內外智能化技術的應用,當前的農用拖拉機多數可匹配95%以上的配套農業機具,專業領域的學者從拖拉機的液壓傳動、電氣控制等方面均做出不同程度的研究與完善,有的學者利用先進的電子控制技術對液壓懸掛、耕作場景進行數字仿真,以達到深入掌握農用拖拉機牽引系統的工作機理和核心動態特性的目的。拖拉機牽引裝置性能的好壞直接決定配套機具的作業效率,筆者就農用拖拉機的牽引裝置智能化改進展開論述。
1 組件構成及特點
常見的農用拖拉機主要工作裝置包括動力輸出裝置、牽引裝置、液壓懸掛裝置及底盤等,主要技術參數如表1所示。工作過程:動力輸出裝置將發動機功率以旋轉機械能的方式傳遞到農機具上,動力的傳輸主要依靠輸出軸和輸出皮帶輪;懸掛裝置通常采用三點懸掛,包括1根上拉桿、2根下拉桿,在連接牽引裝置與待懸掛機具的同時,實現可調節耕深的目的。液壓系統主要包括液壓提升器(液壓缸)、控制閥、液壓附件及管路,通過提供連續的電液控制,提供給農用拖拉機充足的配套動力。
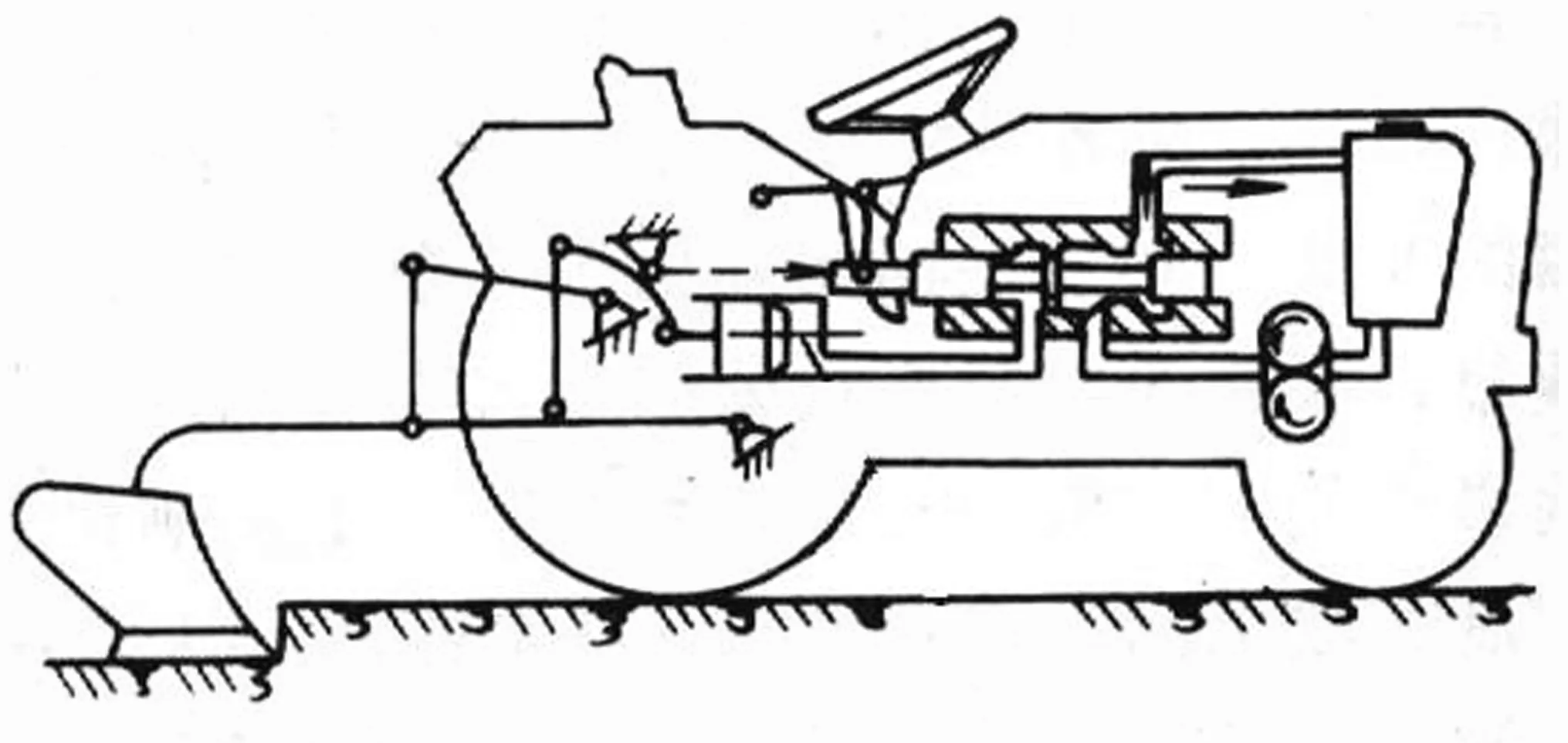
圖1 農用拖拉機牽引作業簡圖Fig.1 Schematic drawing of tractor operation of the agricultural tractor表1 農用拖拉機主要技術參數Table 1 Main technical parameter design of the agricultural tractor
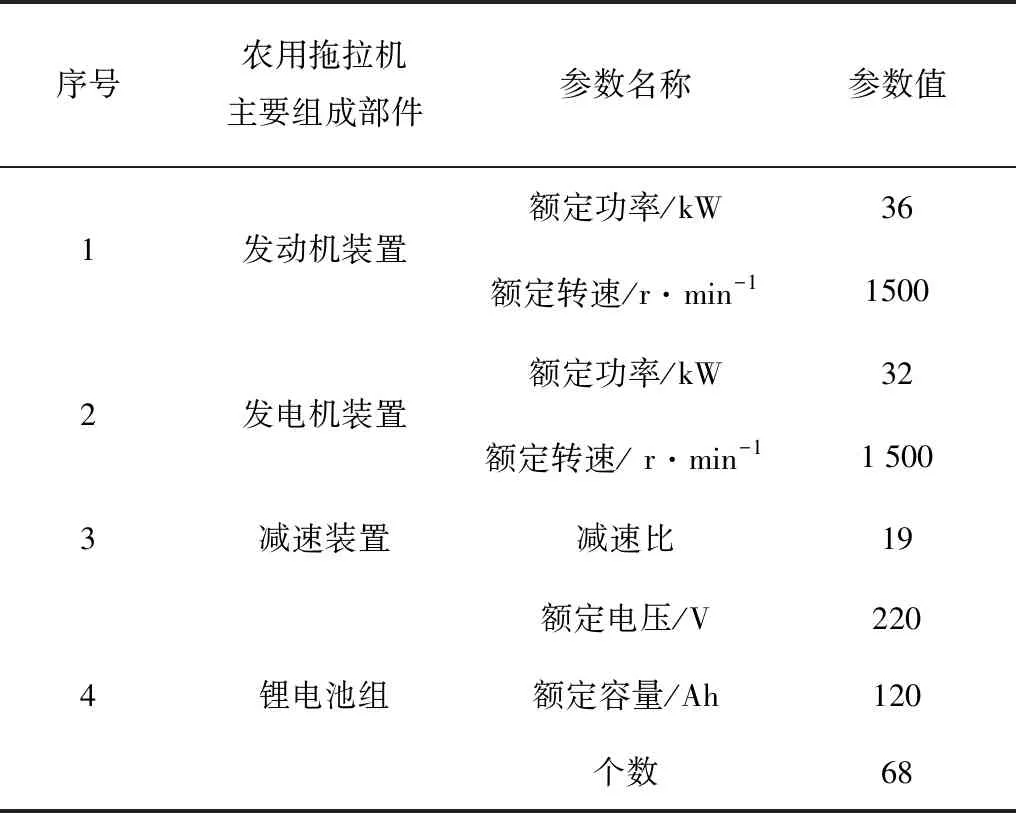
序號農用拖拉機主要組成部件參數名稱參數值1發動機裝置額定功率/kW36額定轉速/r·min-115002發電機裝置額定功率/kW32額定轉速/ r·min-115003減速裝置減速比194鋰電池組額定電壓/V220額定容量/Ah120個數68
2 牽引裝置改進
2.1 數學模型建立
各硬件組成與優化組合會大幅度提升整機工作效率,根據農用拖拉機的行駛速度和驅動輪受到滑轉率的因素影響,得出農用拖拉機的牽引力模型為
(1)
φ=φmax[1-exp(-δ/δ0)]
(2)
(3)
式中v—農用拖拉機行進速度(km/h);
rd—農用拖拉機驅動輪半徑(m);
ne—農用拖拉機動力裝置轉速(r/min);
ig—農用拖拉機變速裝置傳動比;
i0—農用拖拉機減速裝置主傳動比;
ηδ—農用拖拉機滑轉效率;
ηc—農用拖拉機傳動裝置效率;
φ—農用拖拉機驅動力系數;
φmax—農用拖拉機驅動模型特征值;
δ0—農用拖拉機滑轉率;
δ—農用拖拉機滑轉模型特征值;
Ft—農用拖拉機牽引力(N);
Te—農用拖拉機動力裝置輸出轉矩(N·m);
CD—空氣阻力系數;
A—農用拖拉機迎風面積(m2);
G—農用拖拉機驅動裝置所受載荷(N);
f—作業路面摩擦力因數。
從而可知,該農用拖拉機的牽引功率和牽引效率分別為
(4)
(5)
(6)
式中Pt—農用拖拉機牽引裝置的牽引功率(kW);
Ft—農用拖拉機牽引力(N);
v—農用拖拉機行進速度(km/h);
Pe—農用拖拉機驅動裝置的輸出功率(kW);
Te—農用拖拉機動力裝置輸出轉矩(N·m);
ne—農用拖拉機動力裝置轉速(r/min);
ηt—農用拖拉機牽引效率。
2.2 硬件結構設計
根據農用拖拉機的應用場合和需求可知:農用拖拉機的牽引裝置主要分為固定式和擺桿式兩大類,固定式牽引裝置,主要由牽引支架、牽引叉或牽引板及牽引銷總成組成,如圖2所示。為適應懸掛和牽引多種類的農業機具,將牽引叉或牽引板設置成靈活拆卸型,同時針對牽引裝置核心部位進行改進,其連接部件外形設計如圖3所示。具體為在懸掛支架的兩側增加輔助油缸,以確保提升與牽引的柔性度。
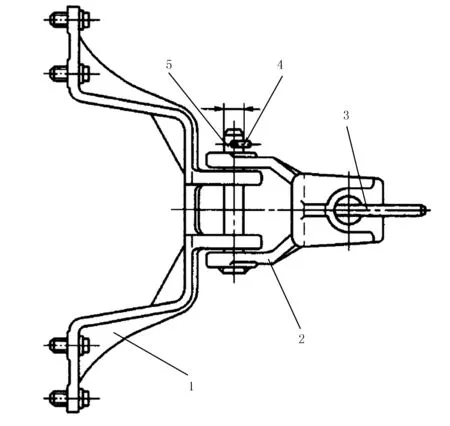
1.牽引支架 2.牽引叉 3.牽引銷總成 4.鎖緊銷 5.長銷圖2 農用拖拉機牽引裝置結構簡圖Fig.2 Structure brief diagram of the traction system of the agricultural tractor
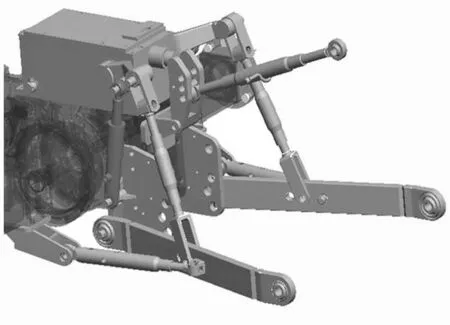
圖3 農用拖拉機牽引裝置連接部件外形設計Fig.3 Shape design of the connecting part of traction device of agricultural tractor
2.3 智能控制優化
根據拖拉機的工作機理,對牽引裝置相關聯的管路進行智能優化,管路布置如圖4所示。本研究改進為全液壓轉向智能控制系統,基于液壓能的連續控制,操縱液壓伺服裝置,合理分配拖拉機的驅動力。實現此功能的組件主要是恒流泵、轉向器、轉向油缸和管路等,應著重考慮轉向油缸執行能量轉換的及時與準確性。
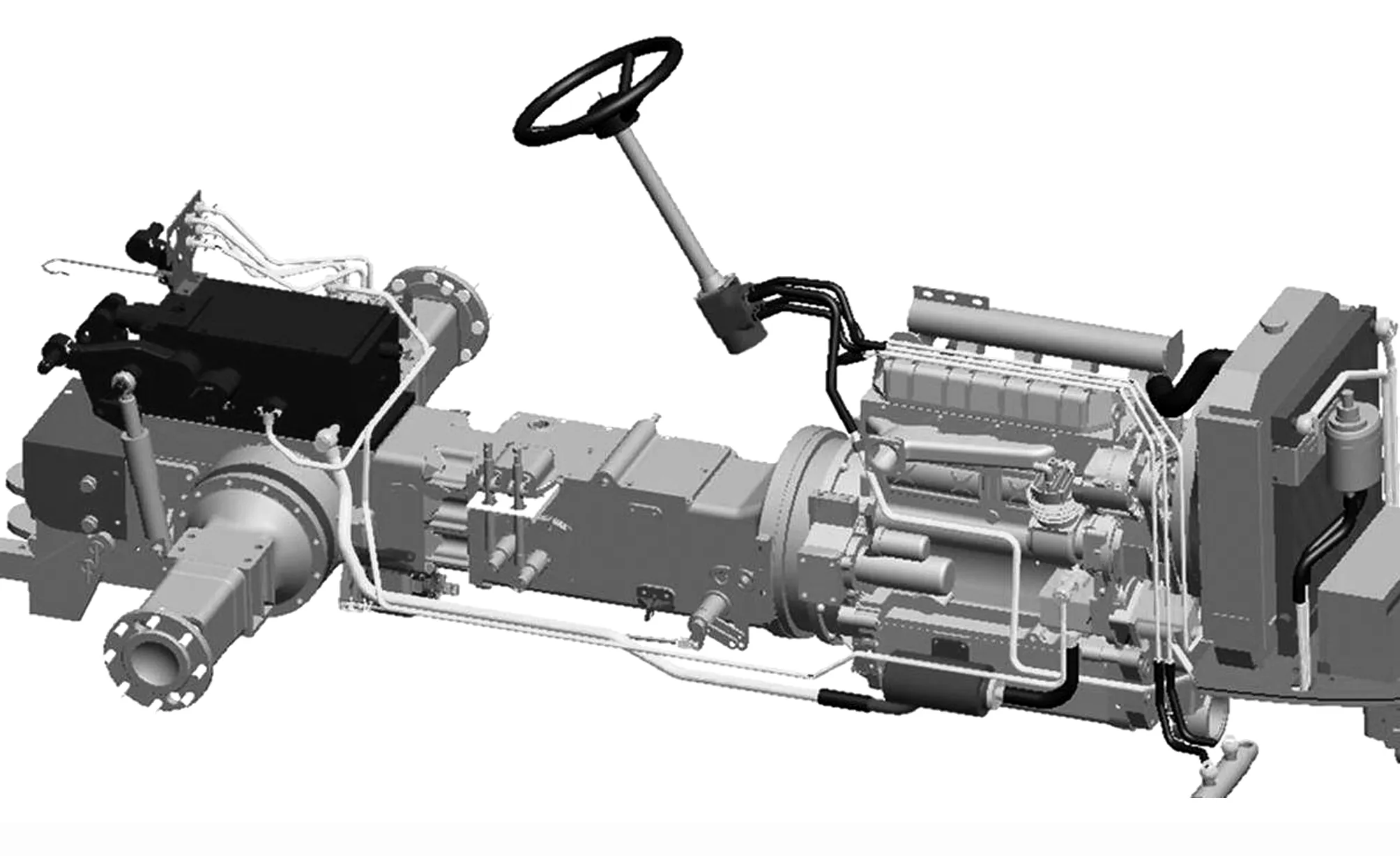
圖4 農用拖拉機牽引裝置智能控制管路圖Fig.4 Intelligent control piping diagram of the traction device of the agricultural tractor
針對牽引裝置提供力的大小,設定該農用拖拉機牽引系統力位綜合調控,流程如圖5所示。由控制實現功能可知:將牽引裝置之前的單純拉力傳感器控制改進為力位綜合調控,首先設定目標深度,經ECU后傳遞給液壓系統,向執行裝置適時發出控制命令,最終至牽引裝置,實現農業機具牽引作業。當引入力位換算形成閉環調節控制,使得牽引裝置控制更加精準,發力更加高效。
對該農用拖拉機的牽引裝置進行智能控制,其原理圖如圖6所示。 工作時, 在主控制器和信號電平控制器的共同作用下,接收來自阻力傳感器、位置傳感器、耕深傳感器的電信號,用電磁閥替換提升裝置分配器,經控制器向電磁閥輸出電流,實現對提升裝置的調節;采取變阻尼和自動調節方式,使之與牽引裝置保持在同一水平點,使運行更精確和平穩,實現智能化牽引作業。
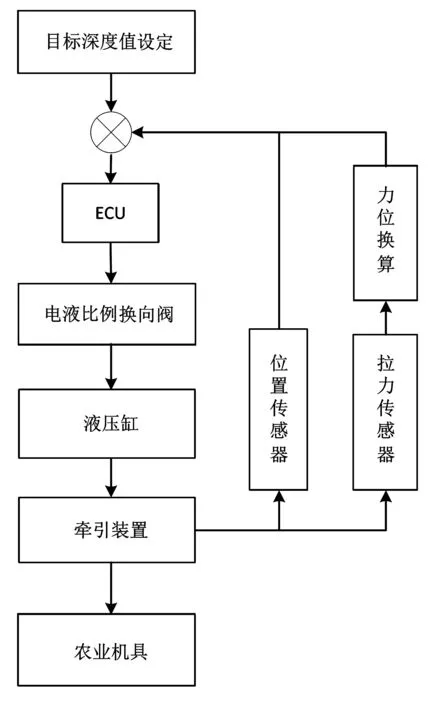
圖5 農用拖拉機牽引系統力位綜合調控簡圖Fig.5 Schematic diagram of the force level comprehensive control of traction system of the agricultural tractor

圖6 牽引裝置下的作業深度智能控制原理圖Fig.6 Operation depth intelligent control principle diagram of traction device on the tractor
3 測試
3.1 前置條件
各項結構參數優化后進行智能化測試,結合牽引裝置布置組成(見圖7),測試前置條件為:
1)利用電信號進行有效實時傳遞;
2)各傳感元部件和主要牽引裝置布置合理靈活;
3)信號獲取過程忽略機械磨損或液壓損耗;
4)測試過程核心控制參量可調性好;
5)整個測試保證靜動態控制質量等。

圖7 農用拖拉機牽引裝置智能化改進布置Fig.7 Intelligent improvement arrangement of the traction equipment for the agricultural tractor
3.2 過程分析
利用機械耦合模式,經規律性變換牽引力的大小和拖拉機驅動裝置功率的匹配,得出如表2所示的農用拖拉機牽引裝置核心參數的智能測試數據。
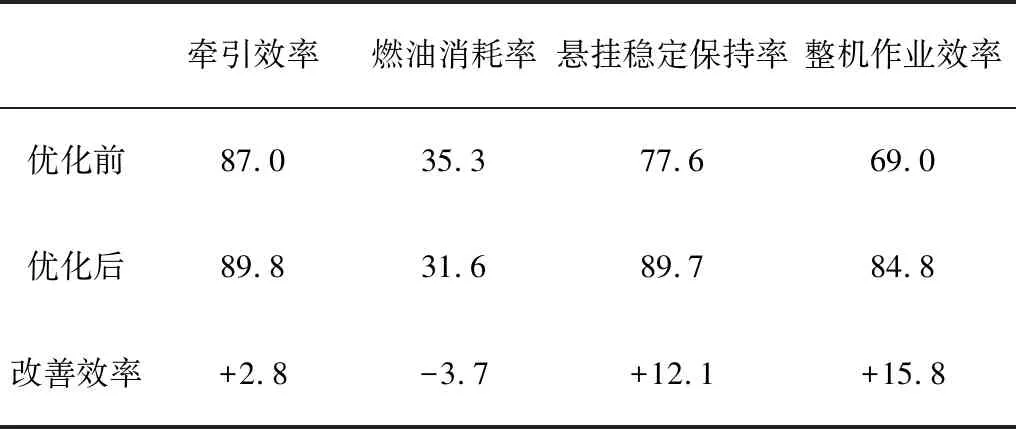
表2 農用拖拉機牽引裝置智能測試數據Table 2 Intelligent test data of traction device on the agricultural tractor %
由對比可知:對比選定牽引效率、燃油消耗率(經折合換算后)、懸掛穩定保持率和拖拉機整機作業效率4個變量參數中,牽引效率在智能優化后提升2.8%,懸掛穩定保持率提升12.1%,燃油消耗率降低3.7%,整機測試運行效果良好。
4 結論
1) 通過分析農用拖拉機整機組件構成及其牽引裝置的作用與機理,對牽引系統進行智能改進,形成驅動、牽引、懸掛系列部件的智能銜接和結構優化,達到改進目標,效果明顯。
2) 對農用拖拉機的牽引裝置進行智能化改進,進一步提升了牽引效率,降低了燃油消耗,且大大提高了農用拖拉機的整機作業效率,可達15.8%。
3) 此優化方法對拖拉機其他組件和系統改進提供了參考,具有明顯的應用價值。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
印刷工業(2020年4期)2020-10-27 02:45:52
甘肅教育(2020年14期)2020-09-11 07:57:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國交通信息化(2017年4期)2017-06-06 07:21:52
能源(2015年8期)2015-05-26 09:15:56
時代英語·高二(2015年1期)2015-03-16 00:08:11