基于中高空無人機的遙測中繼系統研究
2019-05-27 08:23:04
計算機測量與控制 2019年5期
(中國人民解放軍 92941部隊,遼寧 葫蘆島 125001)
0 引言
當前,對高速移動目標實施遙測任務的主要平臺有遙測地面站、遙測船載站以及遙測機載站等。遙測地面站和遙測船載站受視距影響較大,對低空目標作用距離短,對于大航程低空目標的全程測量需要布置多個測控站采用接力方式進行保障,保障設備數量需求多,保障難度較大;采用遙測機載站方式,可以通過升空解決視距限制,提高對低空目標的跟蹤距離,是對大航程低空目標跟蹤的有效方式,但飛機建設、飛機改造和單次使用成本均較高,且遙測機載站接收到的數據不能實時處理,時效性較差。
固定翼無人機技術近年來發展迅速,在戰場偵查、情報收集、遠程打擊中發揮了重要作用。可以作為遙測中繼轉發設備平臺,通過和遙測地面站的搭配使用,提高對遠程低空目標的遙測能力。使用中高空固定翼無人機進行遙測中繼轉發測量具有多個特點:一是覆蓋范圍廣,中高空固定翼無人機一般可在7 000~14 000 m高度飛行,可以極大的提高遙測系統覆蓋范圍,可達近400公里。以2018年珠海航展的無人機為例,翼龍-II無人機飛行高度可達9 000 m,彩虹7無人機巡航高度可達9 000~13 000 m,云影無人機巡航高度可達14 000 m。二是留空時間長,固定翼無人機動輒幾十個小時的連續飛行時間,遠遠超出了有人測控飛機的留空時間。翼龍-II無人機持續飛行時間可達20多小時,彩虹5無人機持續飛行時間可達40小時,云影無人機持續飛行時間可達6小時。三是與傳統遙測機載站相比,中繼轉發測量系統體積小、重量輕、加裝方便。傳統測控飛機需要使用機艙內空間加裝大量的測控裝備、操控臺和相關人員保障設施,遙測中繼轉發系統只需保留其中的天線、數據收發系統和配套保障系統即可,可以大大減小體積和重量。四是使用成本低、保障簡單。相比較有人飛機的飛行條件和保障設施、無人飛機具有價格便宜、運行維護成本低、起降要求簡單等優點。因此,固定翼無人機是一種性能優異、值得研究的新型遙測中繼平臺。五是可以與現有遙測地面站、遙測船載站配合接力使用,提高現有裝備的使用效益。
本文第一部分簡要介紹提出基于固定翼無人機的遙測中繼轉發系統背景,并簡要分析了該技術的突出優點;第二部分對組成該系統的無人機平臺系統、遙測中繼系統、遙測地面站三大部分進行簡要介紹;第三部分對該系統的總體設計技術、無人機平臺選型設計、相控陣天線選擇和設計、中繼轉發方式設計以及相控陣天線自跟蹤技術等關鍵技術進行了初步分析,并簡要給出了解決思路。
1 基于中高空無人機的遙測中繼系統設計
無人機遙測中繼系統主要由無人機平臺、遙測中繼設備、遙測地面站三大部分組成,工作示意圖如圖1所示。
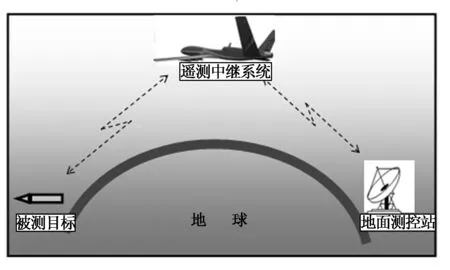
圖1 基于無人機的中繼測控系統工作示意圖
以下分別對三個部分進行簡要介紹。
1.1 無人機平臺
無人機平臺包括無人機和地面控制設備。可以根據實際任務需求,選取市場現有的中高空無人機進行加改裝實現。無人機作為遙測中繼系統的飛行平臺,需要具備一定重量的承載能力和任務載荷空間;需要為遙測中繼系統提供供電保障、并為遙測中繼系統提供實時位置、姿態信息;需要根據無人機外形進行遙測天線設計和加改裝。
1.2 遙測中繼系統
遙測中繼設備安裝在無人機平臺,主要由遙測接收天線、遙測中繼轉發設備、遙測發射天線、航姿測量設備等組成。系統組成如圖2所示。
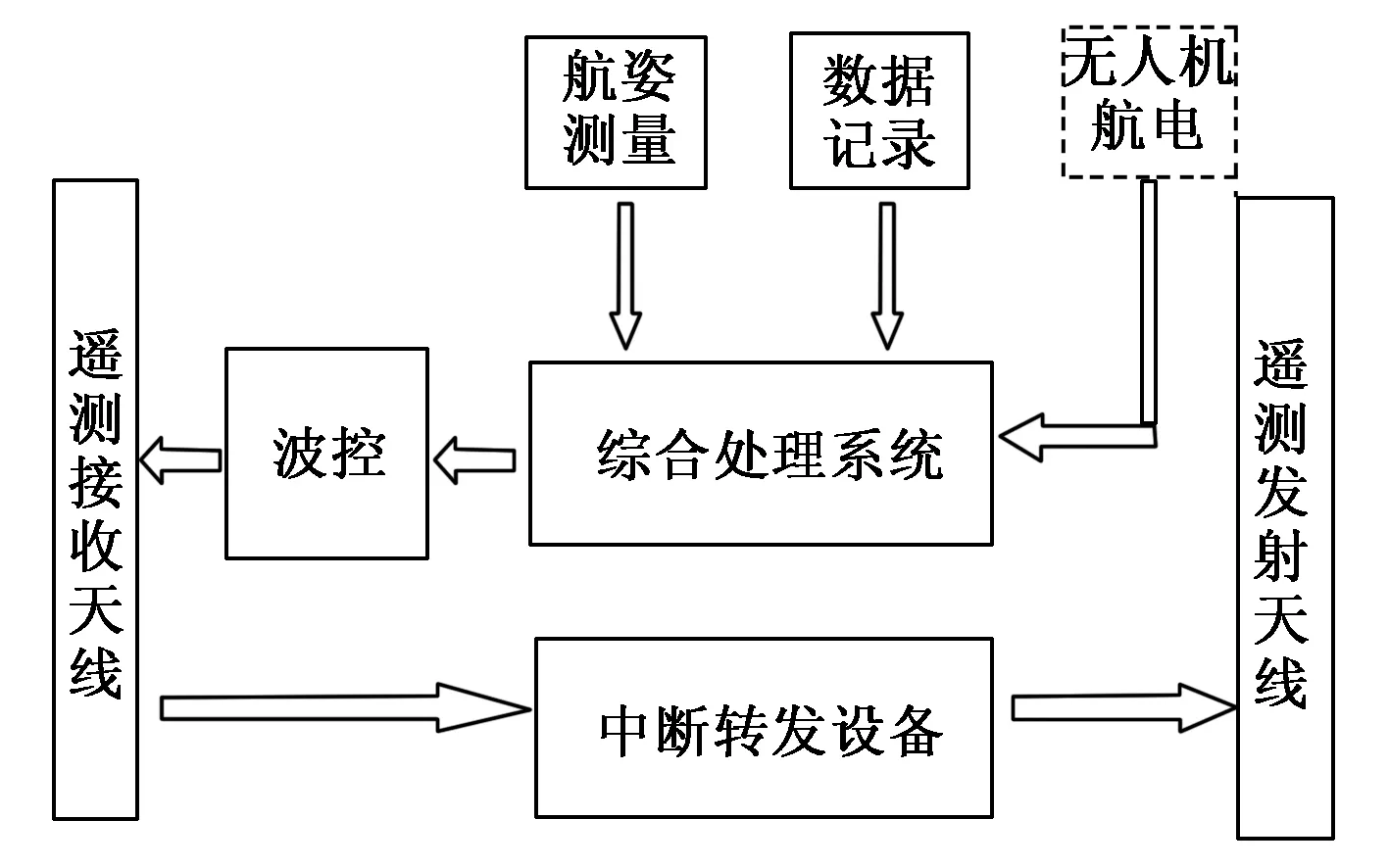
圖2 遙測中繼系統組成示意圖
1.2.1 遙測接收天線
用于接收導彈發出的遙測數據信號,采用相控陣天線方式,安裝在飛機頭部和下部,搭接完成對目標的遙測接收任務。根據無人機選型情況,無人機頭部方向可以采用二維掃描相控陣加透波天線罩防方式,機體下部采用一維或者二維掃描相控陣天線方式實現。
1.2.2 遙測中繼轉發處理系統
由一體化綜合射頻系統組成,用于接收天線發送的射頻信號,采用中頻轉發的方式將遙測信號轉發為另一個頻點進行發送。系統接收相控陣天線的遙測射頻信號,進行低噪聲放大、濾波、下變頻、AGC放大和分路,其中一路依次完成射頻(f1)放大、射頻(f1)濾波、下變頻、中頻濾波、AGC放大、分路、中頻濾波放大、上變頻、射頻(f2)濾波、放大,隨后再經功率放大和收阻濾波輸出給遙測發射天線。另一路信號進入數據記錄器進行記錄,可用于事后處理。
1.2.3 遙測發射天線。
用于將轉發后的遙測信號重新向地面設備發送。天線可以采用全向微帶天線方式,具有體積小、功率低、安裝便捷的特點。
1.2.4 航姿測量設備。
航姿測量設備主要由捷聯慣性測量組合和天線GNSS等組成,實時、高精度測量載體的位置、速度及姿態等,用于為系統跟蹤目標提供支持。當無人機位置姿態測量數據精度滿足遙測中繼系統跟蹤需求時,也可直接使用無人機的位置姿態信息數據。
1.3 遙測地面站
遙測地面站用于對中繼遙測系統發送的目標信號進行接收處理。采用現有遙測地面站或遙測艦載站即可完成,不需重復建設。
2 基于中高空無人機的中繼測控系統關鍵技術分析
基于中高空無人機的中繼測控系統是一種新的測控系統實現方式,系統總體設計時,首先需要根據實際測量需求和作用距離分析確定無人機平臺的飛行高度和速度,確定無人機平臺的選型;然后根據無人機平臺的飛行參數和空間、載荷、供電等能力,確定系統需達到的體積、重量、功耗等總體約束條件;進而完成系統總體設計,形成系統總體設計方案和無人機平臺加裝方案。
系統設計和實現時需要重點解決解決無人機選型及加改裝、遙測接收天線設計、中繼轉發設計等若干關鍵技術,以下給出幾個核心關鍵技術。
2.1 無人機平臺選型
為了完成對目標的跟蹤測量,需要根據測量需求合理確定無人機平臺的飛行高度。設計時需要綜合分析被跟蹤目標的飛行高度、飛行距離和飛行速度,計算出需完成測量的任務包絡,再根據測任務包絡確定無人機的最低飛行高度和飛行速度,并最終完成無人機平臺的選型。
國際通用遙測系統采用S頻段微波信號,其作用距離主要受到無線電視距影響和鏈路電平的限制。無線電視距是指在發射和接受天線之間保持無障礙通信的最大距離,它與地球曲率、大氣折射、地面反射、氣候、地形等諸多因素有關。在沒有地形地物遮擋的情況下,可以僅考慮地區曲率的影響進行計算,公式為:
(1)
式中,h1,h2分別為發射天線和接收天線的海拔高度,單位為m;R為視距距離,單位為km。根據公式可以得到被測目標與中繼測量系統無線電視距和目標飛行高度的關系,也可得出中繼測量系統與地面測控站之間的距離和飛行高度的關系。根據此公式,在確定測控目標的飛行包絡,地面測控站擬選位置后,可以確定出最小視距,從而可以得出無人機平臺的最低飛行高度。
無人機平臺選型時,還需考慮無人機速度對測量的貢獻率。無人機飛行速度越快,速度對跟蹤距離的貢獻率越大,跟蹤目標的時間越長,當無人機飛行速度不小于被測目標飛行速度時,無人機可以進行全程伴隨測量。
影響無人機平臺的主要參數包括無人機飛行的高度、速度、載荷空間和重量等因素。這些參數主要由無人機的尺寸和發動機類型決定。可用于承載中繼測控系統的中高空固定翼無人機主要采用活塞式航空發動機或燃氣渦輪發動機。通常中高空長航時無人機采用活塞式航空發動機,具有燃油經濟效能高、飛行時間長、飛行高度適中、飛行速度慢等特點。該類型無人機巡航高度一般為3 000~9 000 m,巡航速度一般為150~250 km/h。高空無人機一般采用燃氣渦輪發動機,具有飛行時間長、飛行高度高、飛行速度快等特點。該類型無人機飛行巡航高度一般為10 000 m以上,巡航速度一般可達400~600 km/h。無人機尺寸和載荷能力為正比例關系,無人機體積越大,可承載的載荷空間和重量越大。一般中大型無人機的載荷能力可以達到150~400 kg,有些甚至可以達到1 000 kg。這里列舉幾型無人機供參考使用。
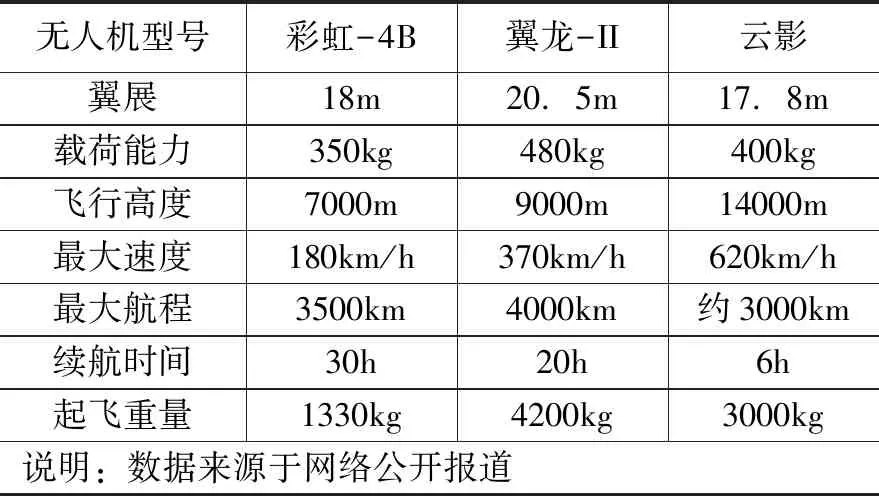
無人機型號彩虹-4B翼龍-II云影翼展18m20.5m17.8m載荷能力350kg480kg400kg飛行高度7000m9000m14000m最大速度180km/h370km/h620km/h最大航程3500km4000km約3000km續航時間30h20h6h起飛重量1330kg4200kg3000kg說明:數據來源于網絡公開報道
2.2 相控陣天線選擇設計和仿真分析
2.2.1 相控陣天線選擇和設計
中繼測控系統設計時,高增益天線是影響系統測控能力的核心指標、是影響系統體積和重量的核心內容,對無人機平臺選型和加改裝具有十分重要的意義。因此在完成無人機選型后,應優先進行系統天線的設計工作。
測控系統分析時,作用距離公式一般可以采用如下公式進行計算:
(2)

綜合考慮系統使用的載荷約束、大掃描角度跟蹤等要求,基于無人機平臺的中繼測控系統可以采用數字相控陣天線模式,在實現高增益的同時,采用相位控制的方式實現對測控目標的跟蹤。無人機通常處于被跟蹤目標上方,對飛行在其下方或者側下方的目標進行跟蹤。相控陣天線主要覆蓋無人機前下方、下方或側下方。為減少對無人機氣動布局和飛行性能的影響,根據無人機機身形狀和載荷空間,可以采取兩種天線加裝方式。一種是將天線加裝在無人機內部,并在天線外部加裝透波天線罩;另一種是將天線加裝在無人機機身外部,采用共型天線直接貼裝在無人機蒙皮上。通常無人機在頭部設置有任務載荷空間,機身頭部可以采用二維相控陣掃描天線+透波天線罩方式,完成對前下方范圍的覆蓋;無人機機身面積較大,可以在無人機機身下方和側下方采用與機身共型的一維相控陣掃描天線方式,完成對無人機下方或側下方范圍的覆蓋。典型條件下、系統天線覆蓋范圍如圖3所示。
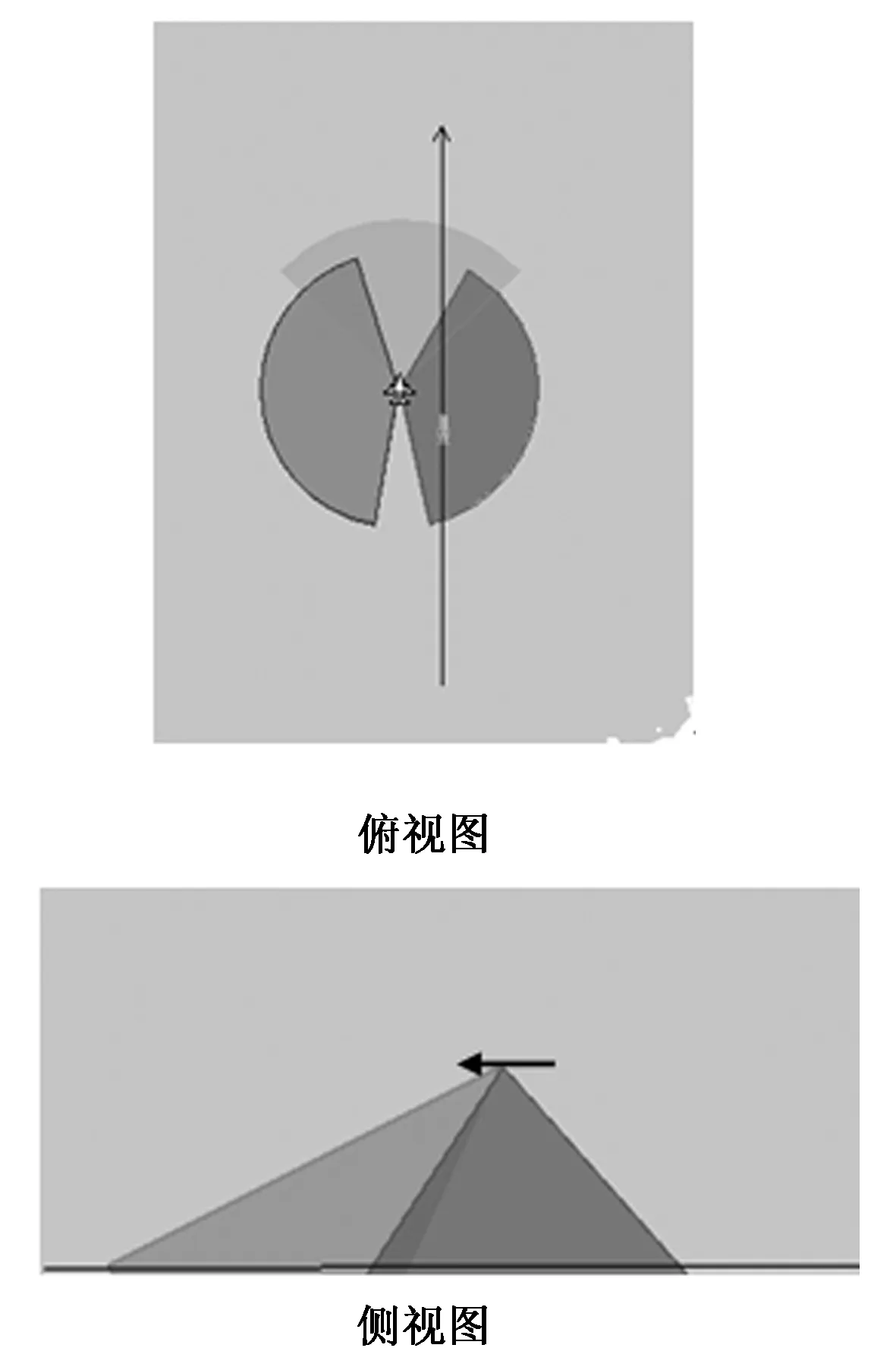

圖3 無人機中繼測控系統天線威力覆蓋范圍示意圖
2.2.2 相控陣天線仿真分析
無人機頭部空間小,對天線尺寸限制大,重點對無人機頭部安裝的二位相控陣掃描天線和天線跟蹤不同碼率典型目標威力進行仿真計算和分析。可以得出,當采用直徑600 mm圓形二維相控陣掃描天線時,低碼率遙測中繼威力可以與無人機對低空目標的通視距離基本相當。相控陣天線法向和30°掃描方向的方向圖仿真結果如圖4所示。
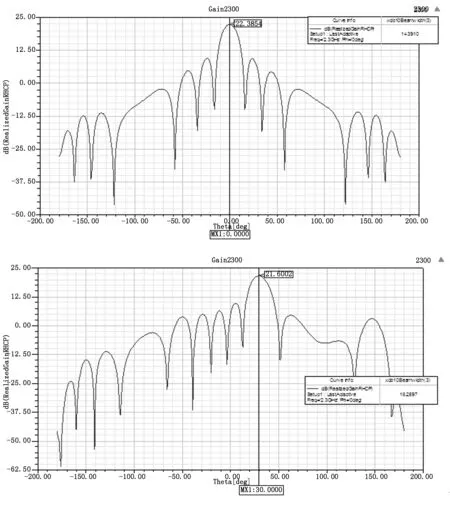
圖4 相控陣天線仿真方向圖
相控陣天線對不同碼速率目標跟蹤威力仿真計算結果如圖5所示。
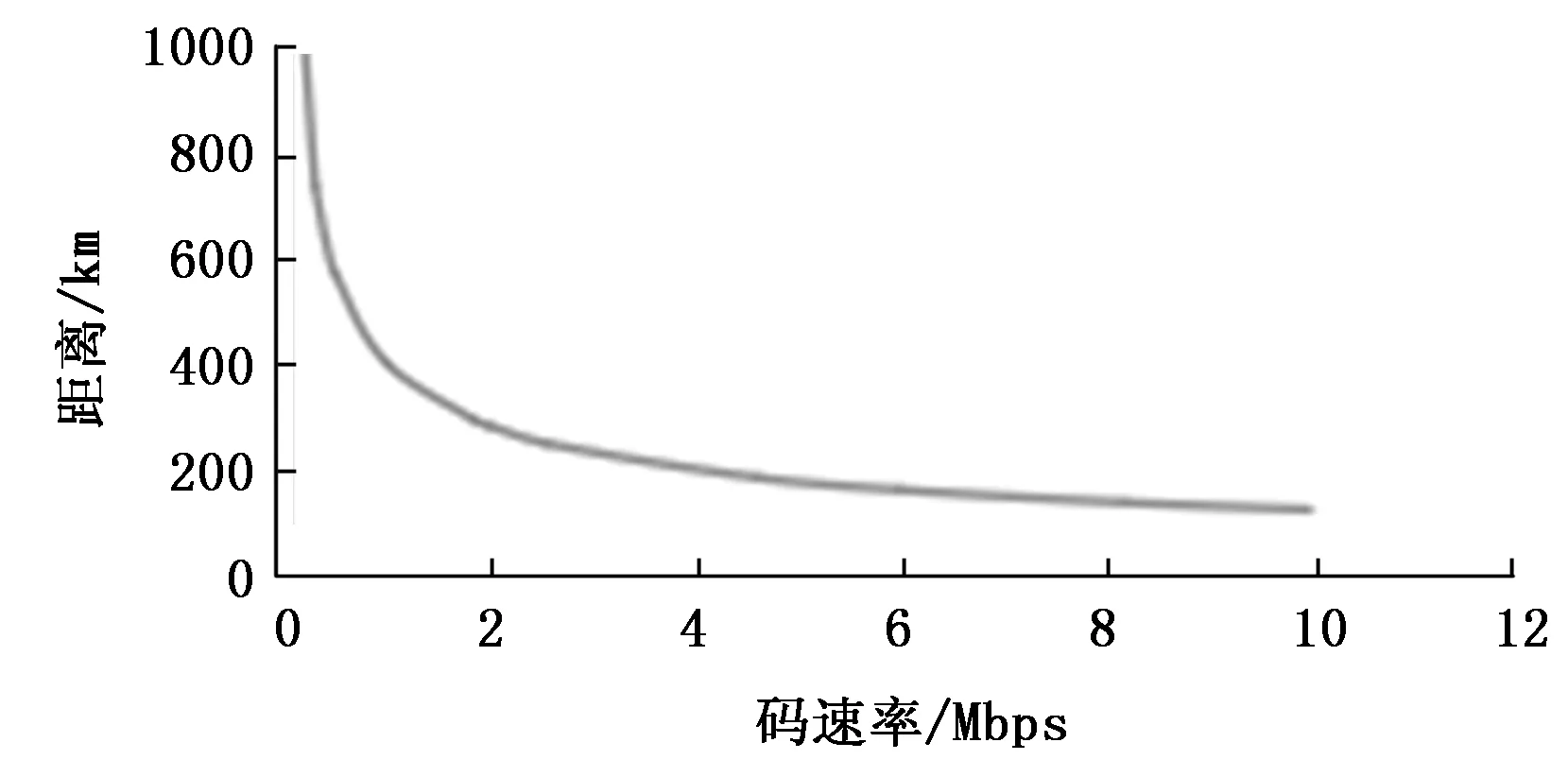
圖5 相控陣天線對不同碼率目標跟蹤威力圖
2.3 中繼轉發方式設計
遙測中繼轉發裝備的轉發體制可分為透明轉發和再生轉發兩種。透明轉發是轉發器通過濾波、變頻、放大等手段,對接收的弱信號進行增強,最終轉發至末端接收設備,整個過程只是頻譜搬移,無信號處理過程;再生轉發則是轉發器先解調接收信號,再將解調信息按終端需求的格式調制后輸出。透明轉發方式簡單,成本較低,對轉發信號格式無要求。轉發器噪聲與轉發信號復合,影響末端接收性能;透明轉發器無信號處理設備,不能作為空基測控站使用。再生轉發從邏輯上等效為兩套收發設備,需要增加信號處理設備,對轉發信號格式有要求,相對復雜,成本較高。但是再生轉發形式轉發器噪聲不會傳遞至末端接收,可有效提高鏈路距離;再生轉發設備可以作為空基測控站使用;
一般在滿足測控距離的條件下,可以采用透明轉發的方式,以降低系統復雜度和成本,減小系統重量和空間。無人機載中繼測控系統具體中繼轉發方式需要根據實際任務需求、設備復雜度、無人機載荷重量和空間約束以及效費比等方面綜合考慮設計。
2.4 微系統技術
根據系統任務需求,中繼測控系統需要實現遙測接收、轉發、存儲、位置、航向、姿態測量、系統工作狀態數據采集等功能,系統功能較多,在進行系統設計時,載荷重量直接影響無人機平臺的選型與設計實現,對載荷的尺寸重量等提出了異常苛刻的要求,因此需要在系統設計實現時,需要采用微系統技術對載荷進行綜合化、輕量化、小型化設計。在結合芯片化、微組裝等微系統技術進行系統設計實現時,首先采用理論模型、仿真優化和測試驗證三者的有機結合的方案開展,重點基于立體互聯微組裝集成工程化技術,采用三維SiP封裝技術,將射頻前端進行整體設計,并進行模塊化封裝,然后與基帶采集處理系統模塊、天線進行集成,這種封裝集成方案可極大的縮短天線到基帶采集處理模塊的距離,使信號處理模塊要盡可能的靠近天線,這種集成方式可以簡化設計、降低能耗、提高系統可靠性,實現了射頻系統小型化,輕量化設計的要求。
2.5 相控陣天線自跟蹤技術
快速穩定跟蹤目標是中繼轉發系統的關鍵技術,運動中跟蹤的實現,依賴慣導的位置姿態信息,雷達波控機在引導方式下工作時,接收慣導發送的位置姿態信息,解算出目標相對于無人機平臺的方位俯仰角(簡稱甲板角),并將甲板角作為引導指令角引導飛機指向。
在正常情況下,雷達波控機在無人值守狀態下工作,自動尋找目標進行跟蹤,因此需要一套完善的自動工作算法流程,稱作自動任務模式,自動任務模式要實現天線伺服系統在自跟蹤狀態、數字引導狀態、搜索狀態之間的智能切換。優先級順序是自跟蹤狀態優先于數字引導狀態,數字引導狀態優先于搜索狀態。
天線首先處于等待點等待目標出現,若滿足自跟蹤條件,則系統自動切入自跟蹤狀態對目標進行自動跟蹤;若不滿足自跟蹤條件,但是數字引導信息有效,滿足數字引導條件,則系統自動切入數字引導狀態對目標進行跟蹤;若不滿足自跟蹤條件,并且數字引導信息無效,則系統自動切入搜索狀態對目標進行跟蹤。為了防止在臨界點時系統在自跟蹤狀態和數字引導狀態或搜索控制狀態之間反復切換,自跟蹤狀態的判據應加入滯回區間。在自動任務模式下,波控機可以在數字引導狀態或者搜索狀態下穩定過渡到自跟蹤狀態。
為了確保實際跟蹤效果,也可以考慮加入遠控模式,對波控機的工作方式進行人工干預。遠控計算機通過監控鏈路對電子吊艙內波控機下發各種工作方式指令,如自跟蹤、數字引導、程序控制、搜索和定點指向等,波控機根據遠控計算機下發的指令工作,并將工作方式和實時角度信息反饋至遠控計算機顯示。
通過以上自動任務模式和遠控方式,可以保證機載相控陣天線的穩定跟蹤。
3 小結
本文在對現有主要遙測地面站特點進行分析的基礎上,結合遙測需求,提出了一種基于中高空無人機平臺的新的遙測中繼轉發系統實現方式,給出了系統的主要組成,簡要分析了系統設計的關鍵技術,并對無人機平臺選型設計、相控陣天線選擇和設計、中繼轉發方式設計以及相控陣天線自跟蹤技術等關鍵技術進行了初步分析,并給出了解決思路,后續將開展深入研究,以期此模式盡快得以工程應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17