基于無線通訊列車控制系統的全自動無人駕駛地鐵系統研究
2019-05-27 08:23:12
計算機測量與控制 2019年5期
關鍵詞:系統
(中車青島四方機車車輛股份有限公司,青島 266000)
0 引言
CBTC(communication based train control system)即基于無線通訊的列車控制系統,作為先進的列車控制思想得到了全世界的認可。它的主要特點為應用可靠的、更高帶寬的無線通訊方式來實現列車和地面設備之間的雙向通信,用以代替軌道電路、應答器等作為媒介來實現列車運行控制。
全自動運行系統涉及車輛、信號、綜合監控、通信、等多個專業,各專業聯系密切。傳統意義上的運行部分交由車載ATC以及TIMS負責,其余通訊以及監控管理部分,則由控制中心負責。傳統的司機、控制中心調度員和車站值班員共同參與運營管理,以控制中心調度員直接面向列車運行。
運營控制系統需要具有完善的自動控制功能,以列車為核心,信號與車輛、綜合監控、通信等多系統配合,完成真正意義上的無人駕駛以及自動化控制。同時,運營控制系統應具有較為完善的綜合維護輔助功能,便于提升列車的安全性以及自愈能力。
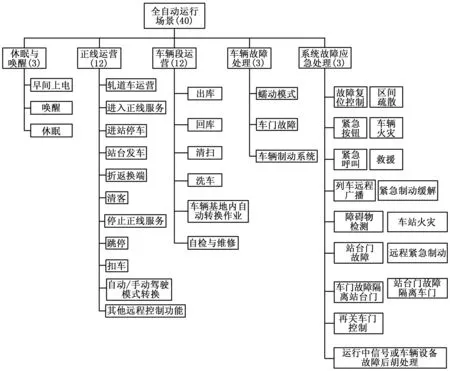
圖1 運行場景
城市軌道交通的運行最早由司機目視駕駛,安全性完全取決于司機,列車運行效率較低。后來,列車自動防護(ATP)系統的出現,可防止列車碰撞,提升了運行安全性。隨著基于無線通信的列車控制(CBTC)系統的出現,列車在實現自動運行(ATO)的同時進一步提升運營效率,司機的工作主要是控制列車車門開閉、列車啟動、降級模式下的處理和車內廣播。為進一步提升系統安全性和效率,列車車門開閉、緊急情況處理皆由系統自動控制實現,對系統自動化水平及可靠性、可用性、可維護性、安全性(RAMS)指標提出了更高要求,在此背景下,全自動運行系統應運而生。
1 全自動運行系統總體設計要求
1.1 系統設計原則
全自動運行系統必須安全可靠、經濟實用,在設備選型時,應考慮建設要求以及冗余設計,加強系統的自愈能力,降低故障發生率。網絡系統必須根據當前環境考慮拓撲網結構的設計,并加強冗余管理,同時具備較強的抗干擾能力。在成本方面,應加大本地生產供貨能力,為后期的維保提供方便快捷的保證。
場景的搭建應做到實效、合理性雙重考慮,盡量將傳統運行線路可能發生的情況都考慮到全自動處理中,保證全自動駕駛列車以及人員的安全。
中心以及車站的主要設備均加入冗余設計,保證主控系統、備用系統銜接正常,互為熱備。
列車內所有主要設備(與運行有關的)均有遠程狀態監控,一旦遠程終端顯示異常,立即采取應急措施,人工干預或引導乘客緊急處理。列車在運行過程中,全程視頻監控,包括兩個頭車對線路的監控攝像頭。
1.2 系統安全原則
全自動運行系統應形成全封閉區域,無特殊情況必須杜絕人員的流動,做好門禁系統的監督。在站臺應保證應急開關的安裝,包括SPKS等。列車內ATC的觸發器模塊應與時刻表相對應,向TIMS發送廣播命令,提醒乘客注意的事項,遇到非緊急警報時,提醒乘客按照相應對策執行;每日的送電、斷電應監管到位,注意各個部門之間的聯系。
2 全自動運行系統場景
根據全自動運行系統特點,結合全自動運行的運行場景,對一些特定場景進行設計,制定運營流程。在車內設備及控制設備出現故障時,應保證行車安全,提高故障排查速度,加強故障預警措施,降低故障發生率,使列車面對常見的問題時,能夠根據系統的設定自行解決。
根據每日早間到晚間列車運行的線路,將列車能夠遇見的情況做成每一個場景來應對,包含正常情況下的處理和異常情況下的處理,共包括場景40項,可根據需要自行選擇,如圖1。
全自動運行系統在傳統有人值守的運行模式中總結日常運營流程,將部分人工手動操作部分自動化,因此,場景搭建是全自動運行的基本建設內容,可以說全自動運行系統是圍繞場景的 搭建為主來設計的,也可以說場景是完整的全自動運行系統的產物。
2.1 早間自動上電
早間上電需進行人工視頻監測道路是否有工作人員遺留,在列車喚醒前2分鐘,停車場內的工作人員將攝像機推送到行調CCTV顯示終端上,并觸發錄制功能,對停車場內進行2分鐘的檢查,并通過站臺廣播播放錄制好的提示音 “線路即將送電,請工作人員撤離”,確認無問題后,通過TIAS終端的對話框通知電調上電,特殊情況下,電調值班人員也可不經行調確認操作后的軟件提示,通過與行調電話溝通確認具備送電條件的前提下,對相關區段人工遠程送電,現場庫內應設置三軌帶電狀態指示燈。
2.2 喚醒-自檢
列車在當日工作結束后,會進入休眠模式,車輛以蓄電池低壓帶電,部分模塊仍然處于待命狀態,當控制遠程發送喚醒指令后,列車自動進行上電自檢操作,當自檢失敗后,向中心發送喚醒失敗警報信息,并遠程休眠或人工手動休眠后,中心再次遠程喚醒。
上電自檢時ATC與TIMS聯合進行,自檢結果中有任何一個設備故障均不允許出車,顯示“無服務”,并向中心匯報。喚醒自檢時不允許開關門以及轉動司機駕駛模式手柄,否則自檢中斷。自檢全部通過后的列車即具備AM模式運行的條件。
2.3 出庫
ATS在發車前的一段時間內(根據需求設定計時時間),為列車設定行駛目標,加載時刻表并限速出庫,其中包括出庫手續辦理以及自動駕駛權限的激活,辦理結束后自動運行至指定位置,自檢失敗且無法短時間修復的車輛,控制中心會替換為備用車辦理出庫,所有車輛準備就緒后,準備更換為進入正線工況運行。
AM模式下,列車出庫進入正線時,車頭越過出庫信號機之前發送場內運行指令給車輛,用于車輛斷開母線高速斷路器(防止出現短路),關閉空調;車尾進入轉換軌后,停止發送場內運行指令,車輛恢復母線高速斷路器。
2.4 巡道
控制中心喚醒首列車作為巡道車,環行一圈或運行至另外一個終點(車輛段),司機上車后以PM手動保護模式運行,期間不開門、不停站。回到正線端點后,司機將模式打至AM(自動)模式,開始正線載客運行。車輛巡道的目的是檢測并確定軌道系統、供電系統、信號系統、ISCS系統、通信系統等運行正常,滿足載客需求。
2.5 進入正線服務
控制中心ATS終端檢查到列車從庫內運行至完全進入轉換軌,或已在正線存車線的列車后,自動根據運行圖為該列車分配車次號,并向列車發送“正線服務”工況指令,當列車ATC檢查到車尾已完全駛出場內最后一個信號燈后,自動停止向車輛發送場內運行工況。此時列車的場景將切換至正線運行場景,車內空調、照明等系統投入使用。
2.6 進站停車以及自動開關門
在列車運行過程中,車內攝像頭全程監控車內狀態,同時LED顯示器與動態電子地圖根據列車時刻表顯示到站信息,即將到達站臺前50米,廣播播報“即將到站”語音提示。當列車未自動對準站臺時,若在停車標+5米以內,ATC會對列車發送指令,跳躍對準站臺;若超過5米的范圍,列車自動跳站至下一站,并向中心發送報警信息,同時ATC內部“OVS”(超過站臺模塊觸發器)向TIMS發送過站指令,觸發車內廣播,為乘客播報提示語音。
列車以AM模式運行時,到站后自動開啟站臺側客室門,相應的廣播、LED顯示器、動態電子地圖相應的開始工作,正常情況下一分鐘后門自動關閉,門障礙物檢測功能在后述內容中體現。
2.7 自動換端
列車行駛至規劃路線的終點站時,待車門全部關閉后進入轉換軌, ATC會將列車主控移交至另一端,并通過ATC完成與ZC的注銷和換端后的自動運行授權申請,并適時辦理折返進路,按照時刻表繼續行駛。
列車運行至終點站時,保持車門不關閉,進行清客處理,同時廣播播放提示語音,提醒乘客全部下車。站臺人員檢查清客完成后,手動按下關門按鈕,列車進入折返轉換軌。
2.8 停止正線服務
在列車停止正線服務后,進入正線存車線或者轉換軌,控制中心發送停止正線服務工況指令,并刪除列車識別號,ATC命令TIMS關閉一半的燈光并關閉空調和照明系統,準備進入停車場的列車斷開高速斷路器,準備休眠。
2.9 回庫
AM模式運行下,進入轉換軌的列車收到停止正線服務指令后,進行回庫作業,中心為列車發送派遣指令,并觸發回庫進路,ZC為列車辦理移動權限。CI收到回庫作業命令時,檢查庫門是否打開等連鎖條件是否滿足,為列車辦理回庫 。距離入庫信號機前,ATC觸發入庫模塊觸發器,向TIMS發送鳴笛指令。從正線回場的列車,車頭越過場內信號機1米,ATC即向TIMS發送場內運行工況,直到車尾完全駛出出庫信號機,AM或人工駕駛模式在庫內運行時,列車速度限制在5 km/h以內。
2.10 清洗
AM模式下,控制中心根據計劃提前打開洗車庫庫門,并設定好計劃內列車的行駛目標,同時將列車的工況設定為“洗車”模式,此時列車恒速(一般為7 km/h)進入洗車庫,洗車臺位自動進行洗車任務,清洗完畢的列車會按照中心排好的路段并設定行駛目標進入列檢庫內,完成一天最后的列檢工作。
2.11 休眠
列車到達停車場內后,中心遠程發送休眠指令,一般休眠時間為2分鐘,列車斷開主要工作內容,僅保留喚醒模塊的供電,由蓄電池提供。斷電前ATC與TIMS發送PMD并存儲,保存完畢后,車輛進入休眠模式;若遠程休眠失敗,工作人員上車手動休眠,按下“手動休眠按鈕”等待列車休眠。
3 全自動運行系統基礎配置
全自動無人駕駛列車系統是充分利用信號技術、通信技術、控制及現代化信息技術的具備高度自動化水平的新一代軌道交通系統。

圖2 全自動運行系統基礎配置
將列車駕駛員執行的工作完全自動化、高度集中控制;車輛段列車自動喚醒、車站準備、進入正線服務、正線列車運行、車站折返、退出正線服務、進段、洗車和休眠等,列車的啟動、牽引、巡航、惰行和制動,以及車門和車站屏蔽門的開關;車站和車載廣播等控制均在無人的狀態下自動運行。
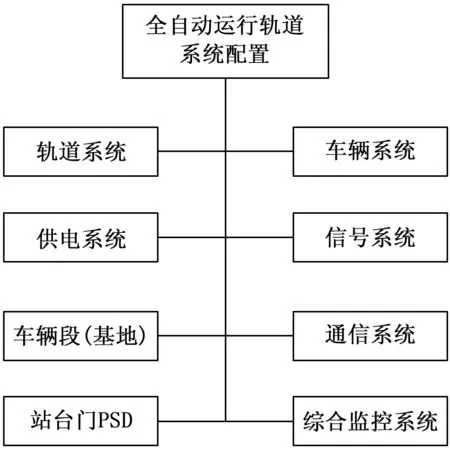
圖3 系統配置圖
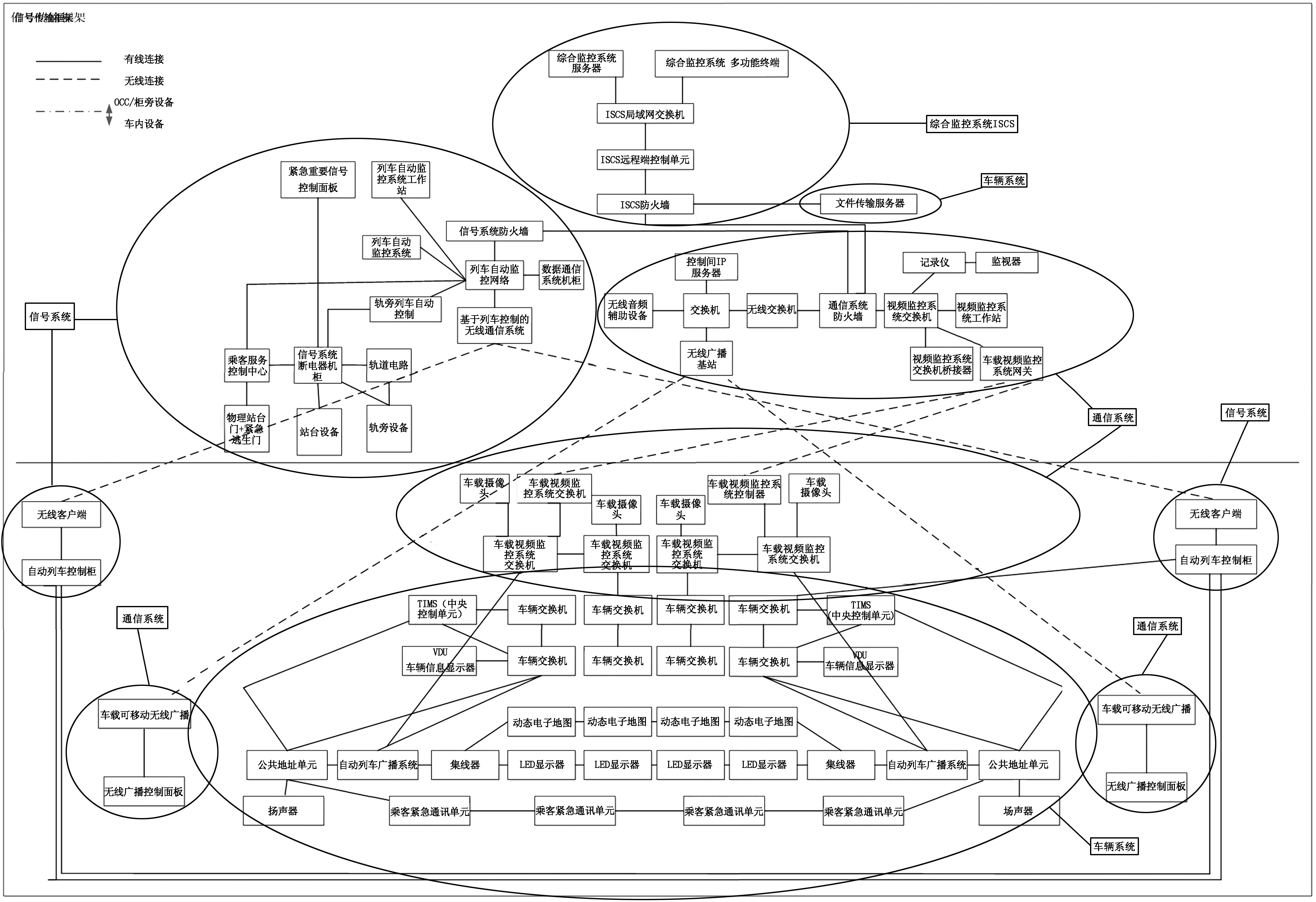
圖4 系統通訊結構圖
3.1 信號系統
信號系統是列車全自動運行控制核心系統,是控制列車運行,保證行車安全,提高運輸效率,傳遞行車信息。信號系統應采用基于無線通信技術的移動閉塞系統,正線運行、列車出入庫及段/場內全自動區域運行,均可實現全自動運行。
信號系統由ATS、ATC組成,其中車載ATC控制ATP以及ATO,對列車自動駕駛時提供保護以及約束。信號系統作為列車自動運行的大腦,提供行動命令,因此應具備完善的數據結構以及多模式場景的搭建。
列車場景的模式選擇由中心內的調度人員發起,包括休眠、喚醒、自動進出段、自動進站停車、自動開關門、自動發車、自動折返、自動洗車和自動調車作業等。當列車模式等級降低時,車載ATC自動為列車限速,在車輛有定位時可由中心為列車限速并排路,此時為有保護的人工駕駛PM模式,列車可高速運行;當駕駛模式降至RM模式時,列車為無區域保護的限制人工駕駛模式,此時司機只能駕駛列車低速運行。
3.2 通訊系統
根據全自動運行需求,通信系統需為調度人員提供運行車輛現場圖像、故障信息以及相關聯動調度指令下發的傳輸通道,涉及視頻監視、車地無線通信網(數據)以及無線通信(語音)三個系統。
3.3 車輛系統
車輛是全自動運行系統的載體,整個全自動運行技術都是圍繞著車輛來構成的,乘客直接面對的也是車輛,全自動運行系統技術的成功需要高可靠性、高可用性車輛系統的支撐。
無人駕駛列車的司機室采用內藏式設計,正常運行時由玻璃罩板保護,司機操控面板安裝有車輛狀態指示燈,乘客可在玻璃罩板外觀看到車輛的運行狀態。列車網絡之間采用冗余設計,各個接口之間采用雙通道傳輸,降低故障發生率。
每列車車門旁應有供乘客應急使用的緊急逃生手柄,并有蓋板保護;車內安裝有緊急廣播按鈕為乘客開放,用于日常的車內突發情況。防止電力系統出現故障,車內蓄電池續航能力應保持高水準,最低帶電量的工況下應保持至少10小時續航。
3.4 站臺門
每站相對應的都有屏蔽門,防止乘客在列車未到站時誤跌入軌道。站內的設備間可對站臺門進行編輯,設置開啟標準信息錄入誤差,一直是人們亟需解決的問題。本文引用了智能技術、追蹤技術,同時針對IOS系統、Android系統、Blackberry系統、Windows phone四大系統的各項移動終端設備錄入信息進行誤差控制。該控制系統能夠在不影響時間以及屏蔽信息,同時在站臺處應有隔離/緊急開關手柄,同時應有防擠壓功能。
3.5 綜合監控
綜合監控系統也叫ISCS系統,通過無線電的通道與車內信息交流,車內主要事件的觸發均應顯示在ISCS的終端,例如乘客緊急通訊時的報警觸發。綜合監控系統在調試時應注意與其余系統的接口問題,自身的程序調試無誤后,在調試的過程中仔細檢查與信號方及通訊方的信息交流。
3.6 車輛基地
全自動車輛基地是承擔全自動運行列車運用、停車、整備、清潔、檢查、定期檢修、調試等功能的場所,將正線對列車的運營控制權由車站延伸至場段的全自動運行區域。應具備自動喚醒、休眠列車、自動出入場功能,宜具備與停車列檢庫庫門、洗車庫庫門聯動、自動洗車等功能。
4 結論
基于CBTC的全自動無人駕駛地鐵系統具有高安全性、高舒適性,節約了能源,減免了司機勞動,是目前城軌地鐵運行的自動化程度最高級別的軌道系統,已經成為下一代軌道車輛運行系統的設計的趨勢。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32