基于仿人機械手的五指力封閉抓取算法
2019-05-27 08:23:20于建均阮曉鋼于乃功張子豪
計算機測量與控制 2019年5期
于建均,安 碩,阮曉鋼,于乃功,張子豪
(1.北京工業大學 信息學部自動化學院,北京 100124;2.計算智能與智能系統北京市重點實驗室,北京 100124)
0 引言
手是人類在長期進化過程中形成的最完美的工具,能夠靈活穩定的抓取物品,使用工具。仿人機械手作為人類肢體的有效延伸, 從設計初始就效仿人手結構,以期望能夠像人手一樣實現靈活、精細的抓取操作等功能。
在外觀上,隨著系統的集成度的提高、全數字機電集成化等概念的提出,機械手從尺寸、手指數目、自由度的分配、傳動方式、多感知功能等方面越來越接近人手。從早期的多指機械手,如日本的Okada手,美國麻省理工學院和猶他大學聯合研制的Utah/MIT Hand,美國斯坦福的Stanford Hand等,到如今的仿人機械手,如英國的Shadow Hand,中國哈爾濱工業大學和德國宇航中心聯合研制的HIT/DLR II Hand等,機械手已經具備了人手的基本硬件結構,正向著更加智能化和靈巧化的方向發展。
在功能上,仿人機械手的目的是能夠取代人手完成相應的工作。機械手具備了人手的外觀,但不具備人類天生具有的運動技能。人類知道如何成功的抓取一個之前未接觸過的目標物體。對人類神經中樞的研究表明,控制人類各個部分運動的前運動皮質中,有接近四分之一是用于對手的控制。人手在抓取目標物體的過程中,會自動滿足力封閉等條件。人類在抓取的過程中可以平衡任意作用在物體上的擾動,穩定抓取。因此如何根據所要目標物體的形狀、以及手的運動學動力學特性等因素,實現仿人機械手成功抓取的任務是仿人機械手研究的熱點。
機械手的抓取, 是各手指分別趨近位于作業空間的物體, 直至接觸并對物體施加作用力, 通過多個手指的聯合作用形成能抵抗物體上外載荷的接觸構形, 從而在機械手與物體之間形成運動和力的傳遞關系。為了解決仿人機械手抓取的這一問題,Jean Ponce基于人手的抓取特性提出了一種三指力封閉抓取線性凸多面體目標的方法。[4]在此基礎上,李家煒針對三指力封閉抓取采用矢量法給出了充分條件的證明[5]。
現代的仿人機械手由于自由度較高,所以仿人機械手對應著復雜的運動控制系統。仿人五指機械手的控制系統本質是協同控制5個多自由度的機械臂,驅動單元多,控制復雜。對于不同的驅動方式與鏈接方式的機械手,同一種控制方法,效果存在偏差。所以在三指力封閉的抓取過程中,一旦出現控制信號的映射偏差,或某一自由度控制未能達到要求水平,就會出現手指末端未與目標物體形成摩擦接觸點或摩擦接觸點位置偏移,導致抓取不平穩或脫落的現象發生。
本文為了使機械手達到穩定抓取的效果,提出了一種效仿人手抓取的五指力封閉抓取算法,其本質是利用冗余機制解決傳統三指抓取過程中可能出現的抓取不平穩或脫落的問題。首先,基于三指力平衡算法的思想上提出了滿足五指力封閉抓取算法的條件。然后,對五指力封閉抓取算法進行了充分性和必要性的證明。最后,通過仿真環境下的實驗抓取不同目標物體,驗證了五指力封閉算法的可行性。
1 抓取模型的建立
人類會根據抓取目標的不同,進行手部姿態、接觸點位置和力的調整,從而達到穩定抓取的目的。機械手在模仿人手抓取的過程中,同樣需要預先獲得目標物體模型,進而進行運動規劃。以凸多面體族為抓取對象,針對凸多面體族建立抓取模型。
1.1 機械手抓取平面的建立
人類在抓取操作的過程中會滿足力封閉和幾何封閉,從而達到穩定抓取的目的。因此,在研究仿人機械手的抓取規劃過程中,以人手的抓取方式作為最佳抓取示范。為了保證仿人機械手具有最大的抓取空間,結合其特點,如圖1所示,規定靈巧手大拇指基關節的YZ平面同工作臺平行時為靈巧手的最佳抓取初始姿態,X軸的正方向表示靈巧手的抓取進入方向。在理想狀態下,靈巧手抓取目標物體的過程中,手指的接觸點在YZ軸平面上的投影所構成的點集就是物體在YZ平面投影曲線上的解。[2]仿人靈巧手五指落在目標物體上形成的投影可以用特定函數進行表征。定義表征投影點的函數為機械手抓取平面。
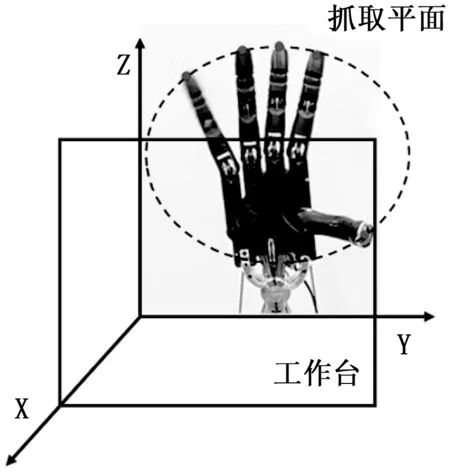
圖1 機械手抓取平面
1.2 抓取模型的建立
本文抓取目標物體為凸多面體族。凸多面體族,也稱歐拉多面體,特點是多面體在它們每一面所決定的平面的同一側。凸多面體族的任何截面都是凸多邊形。所以抓取平面的投影構成的點的集合可以用超橢圓建立特定的函數關聯,即仿人抓取平面。超橢圓(superellipse)也稱為拉梅曲線,可以通過改變超橢圓的部分參數模擬自然界中的大部分凸多邊形,包括矩形、方圓形、橢圓形等。超橢圓可以模擬的形狀如圖2所示。通過增添少量附加參數,甚至能夠模擬任意不可能具有任何特別生物學意義的圖形。[3]因此,本文用超橢圓描述仿人抓取平面(投影點)的模型。一般超橢圓的笛卡爾描述為:
(1)
用參數可以表示為:
(2)
式中,ax與ay為超橢圓的尺寸參數,用于定義x,y半軸的長度;ε為超橢圓2D平面中的形狀參數。利用超橢圓方程表示靈巧手所抓握的物體時的二維平面,即仿人抓取平面。
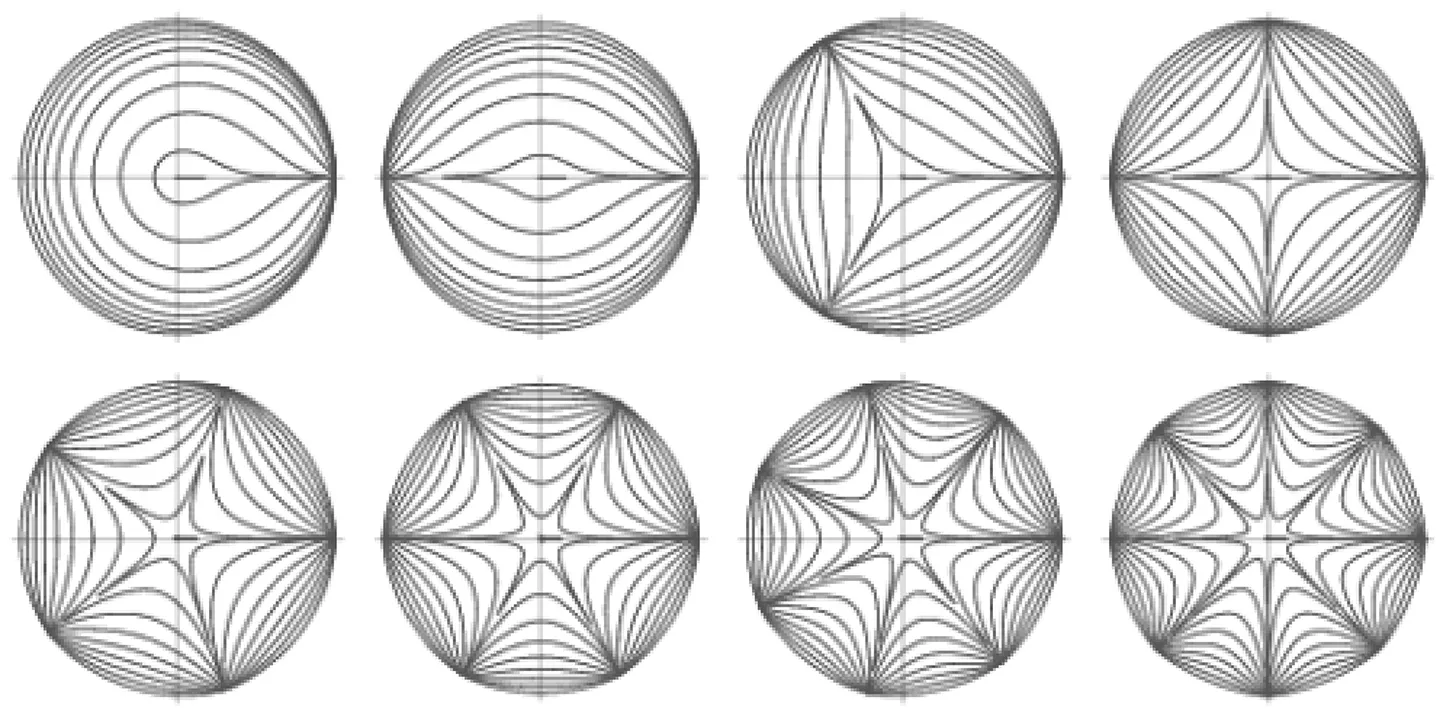
圖2 超橢圓表達平面
對超橢圓進行一般化處理,且在X軸方向進行離散化處理,模擬完整的示教空間中的表達情況,推導得到超橢圓抓取空間中的方程。如圖3所示,設超橢圓標準方程的坐標系為∑O0,S1=(y1,z1)為一般超橢圓∑O1在標準坐標系中的位置,兩坐標系之間的夾角為θ。
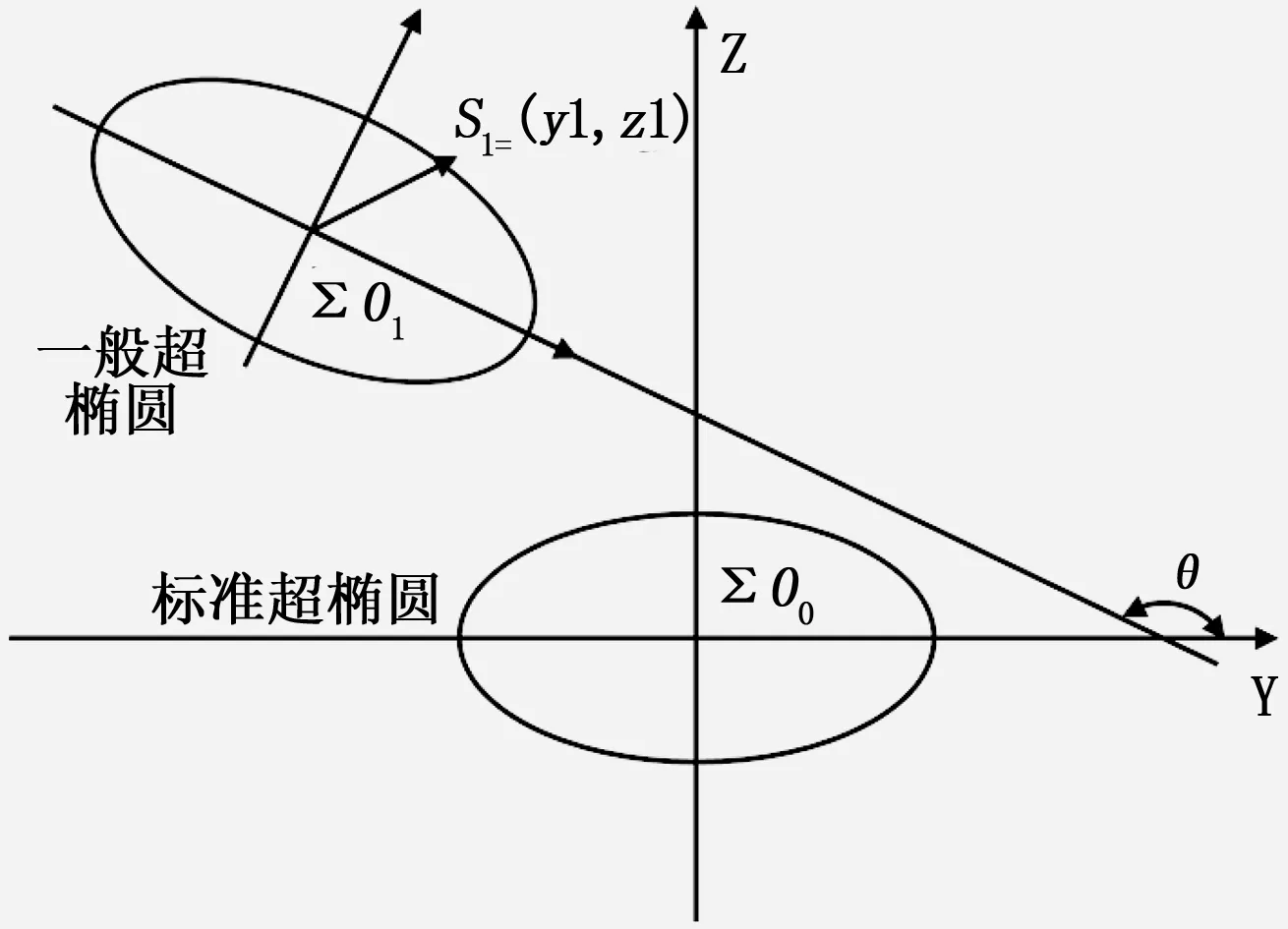
圖3 超橢圓在空間中的表達

(3)
得到S1的表達式為:
(4)
超橢圓方程的一般表達式為:
(5)
上述描述即為凸多面體族的抓取平面表達方式。
2 一種五指力封閉抓取算法
人手在抓取目標物體的過程中,會自主規劃,滿足力封閉等條件以達到穩定抓取的效果。機械手的抓取效仿人手力封閉, 是各手指分別接觸并對物體施加作用力, 通過多個力的聯合作用達到穩定抓取的效果。一個理想的力封閉抓取能夠平衡任意作用在物體上的擾動外力。
2.1 抓取靜力學分析
本文結合實際情況,采用標準的摩擦點接觸(point contact with friction)來表示機械手指與物體之間的接觸模型。摩擦點接觸是指考慮手指和物體之間的摩擦力,將沿表面切線方向的摩擦力看成法向力的函數。設切向力的大小為ft∈R,法向力的大小為fn∈R,靜摩擦系數取決于接觸面材質,一般情況下摩擦系數小于1,設摩擦系數為μ,則接觸點處出現滑動的條件為:
|ft|>μfn
(6)
為了保持手指與物體之間的穩定接觸,所需施加的切向力需要滿足:
|ft|≤μfn
(7)
手指與物體之間的接觸力必須位于以表面法線為軸線的摩擦錐內,該摩擦錐相對于法線的圓錐角也稱摩擦角,表示為α=arctanμ。由于μ小于1,所以摩擦角一般小于45°。摩擦錐表示為:
(8)
式中,
(9)
2.2 三指力封閉算法描述
Jean Ponce基于人手的抓取特性提出了一種計算二維多邊形物體三指穩定抓取的方法:假設機械手與線性多邊形物體進行三摩擦接觸點接觸,通過保持手指抓取過程中的形狀閉合,實現穩定抓取的效果。再此基礎上,李家煒教授提出了基于幾何分析的力封閉算法:基于三指力平衡的抓取方式,并通過矢量法進行了證明。
三指力平衡定理:
施加在物體上的非共線作用力f1,f2,f3若要達到平衡,當且僅當滿足下述條件:
(1)f1,f2和f3共面,可以正向跨越整個平面且相交于一點;
(2)f1,f2和f3共面且平行,并且其中至少有一個力與其他的力方向相反。
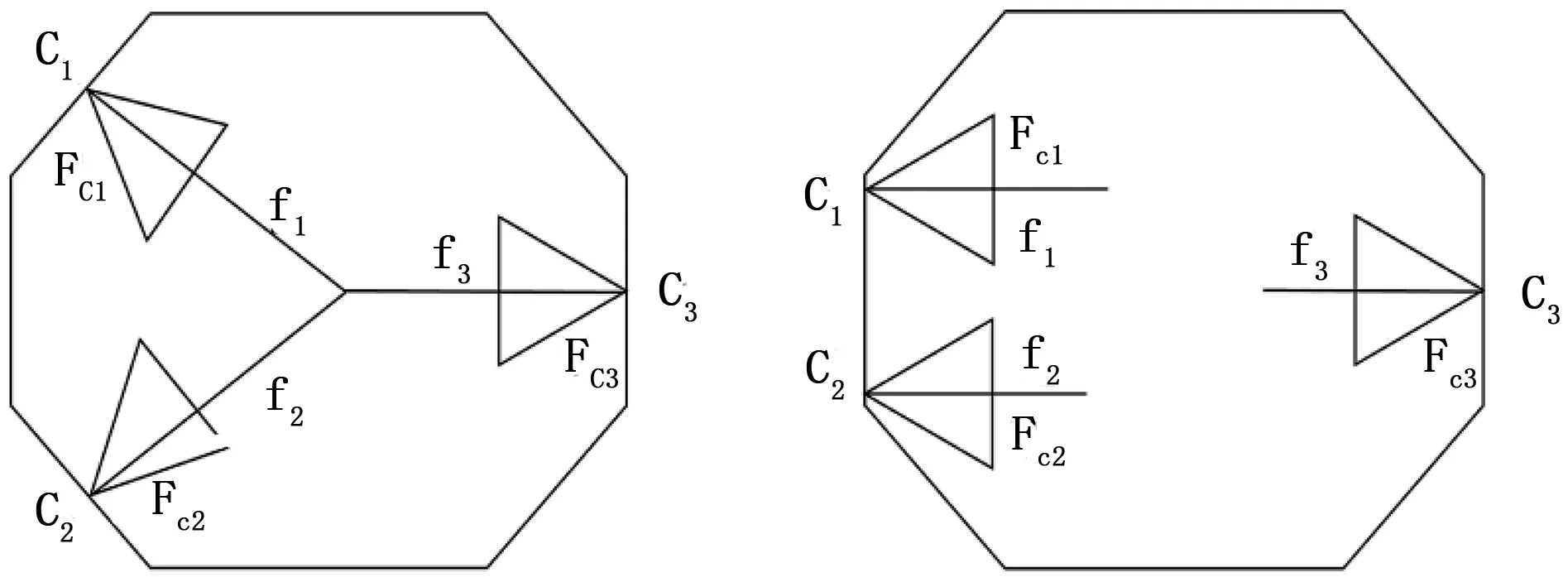
圖4 三接觸點保持力平衡性的表示
若fi∈Fci,i=1,2,3(fi嚴格位于其摩擦錐Fci內部)滿足上述條件之一,接觸點C1,C2,C3構成一個力封閉抓取。[2]正向跨越整個平面是指平面內的任何向量均可由三個力的正線性組合表示。[6]該性質描述了三個接觸點抓取力平衡的充分必要條件。
2.3 五指力封閉算法的提出
目前的仿人機械手具有較高自由度,往往在13自由度以上;驅動、傳動方式較為復雜,如電機驅動,氣動驅動,腱傳動,連桿傳動等。由于機械手本身具有復雜的運動控制系統和驅動、傳動方式上產生的誤差,很容易造成傳統的三指力封閉的抓取出現控制信號的映射偏差,或某一自由度控制未能達到要求水平。傳統三指力封閉抓取就會出現手指末端未與目標物體形成摩擦接觸點或摩擦接觸點位置偏移,導致抓取不平穩或脫落的現象發生。結合仿人機械手五指多自由度的機械結構特點,本文提出一種五指力封閉算法,其本質是利用冗余機制解決傳統三指抓取過程中可能出現的抓取不平穩或脫落的問題。在五個摩擦接觸點中,任意三點隨機組合,滿足至少有7種組合可以形成力封閉,則在五指抓取的過程中可以穩定抓取,任意脫落一到兩個關節不影響抓取的穩定性。
五指力封閉定理:
若五個滿足摩擦約束的接觸點Ci(i=1,2,3,4,5)的力封閉抓取中至少存在7個三點力封閉抓取,當且僅當下述條件成立:
(1)對于?Ci,Cj,i,j∈{1,2,3,4,5JB)}〗且i≠j,則可定義一條直線Lc滿足:接觸點Ci,Cj的法線ni,nj在直線Lc上的投影方向不同;Lc?Fci∩Fcj且直線Lc嚴格位于Fci內部。
(2)λ<θ,φ<θ,α<θ,且Lc∩Fcl∩Fck∩Fcm≠φ,{i,j,l,k,m}={1,2,3,4,5}且i≠j≠m≠k≠l。其中,θ為接觸點C的摩擦錐半角,λ,φ,α分別為法線nl與Ci,Cj,Cl三個接觸點構成的平面間的夾角,法線nk與Ci,Cj,Ck三點構成的平面間的夾角,法線nm與Ci,Cj,Cm三點構成的平面的夾角。
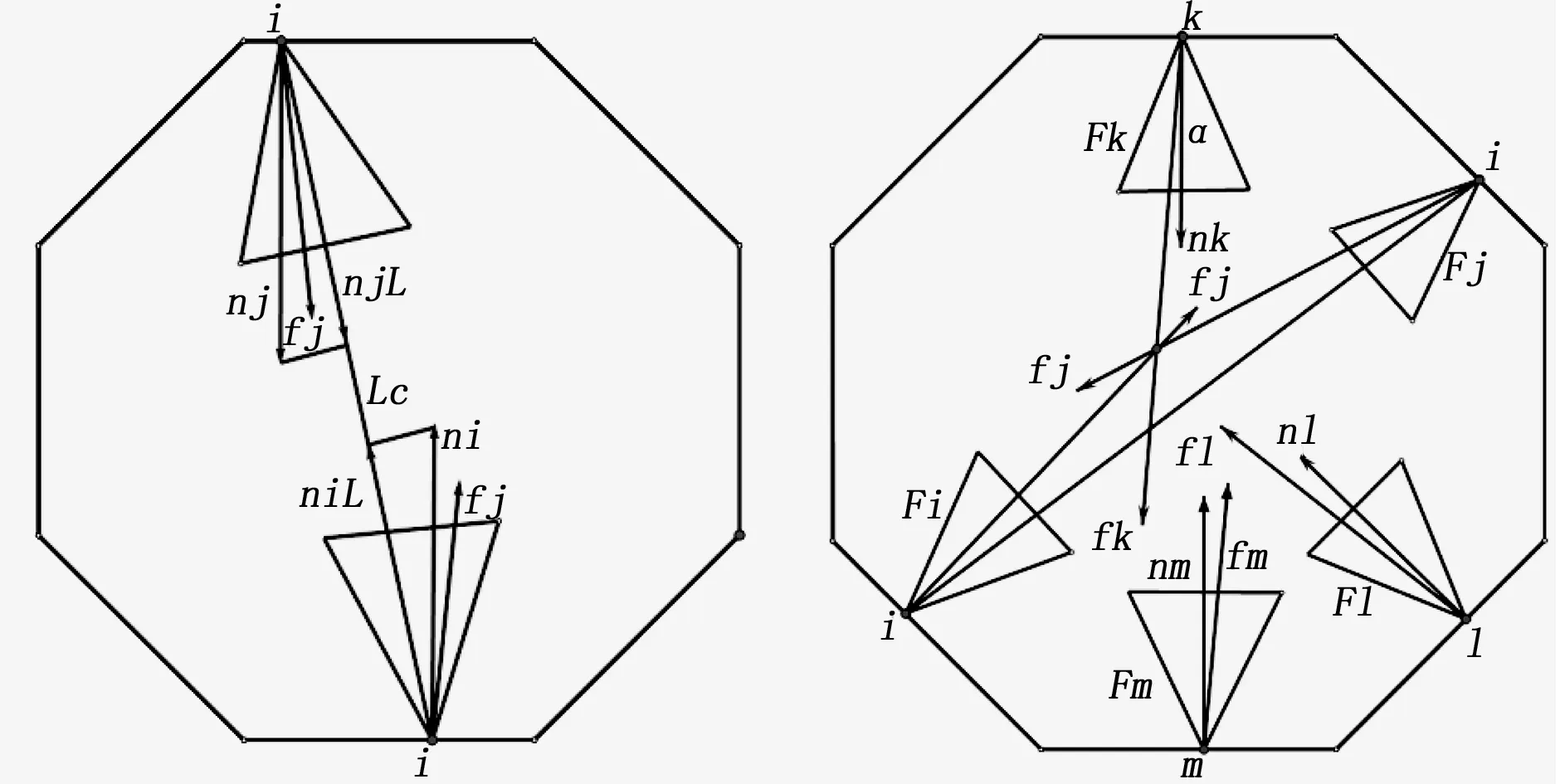
圖5 滿足條件(1)的接觸點Ci,Cj 圖6 滿足條件(2)的接觸點Ci,Cj,Cl,Ck,Cm
2.4 五指力封閉定理證明
2.4.1 充分條件證明


因此,在滿足條件的五摩擦點Ci,Cj,Cl,Ck,Cm抓取中,(Ci,Cj,Cl),(Ci,Cj,Ck),(Ci,Cj,Cm),(Ci,Ck,Cl),(Ci,Ck,Cm),(Ci,Cl,Cm),(Ck,Cl,Cm)均可構成力封閉抓取。
2.4.2 必要條件證明

存在摩擦接觸點Ci,Cj使得Lc?Fci∩Fcj,那么接觸點Ci,Cj,Ck構成的抓取若想達到平衡則需滿足Fci∩Fcj與Ck位于Lc的同一側,使得fi,fj,fk正向跨越整個平面。總會存在由點Ci,Cj和其余三個摩擦接觸點Cl,Ck,Cm構成的三種組合使得Fci∩Fcj與其余兩點位于Lc的異側。則對于(Ci,Ck,Cl),(Ci,Ck,Cm),(Ci,Cl,Cm)不能構成力封閉。
故條件(1)為構成力封閉抓取的必要條件。
假設條件(2)不成立。由三個摩擦接觸點C1,C2,C3構成力封閉抓取的必要條件為:接觸點的抓取平面與摩擦錐相交截,即法線nl,nk,nm與抓取平面的夾角λ,φ,α小于摩擦錐半角θ。所以要想保證力平衡抓取,必須保證λ<θ,φ<θ,α<θ。故條件(2)為構成力封閉抓取的必要條件。
2.5 一種五指力封閉點集合確定的方法
上述部分證明了五指力封閉定理的有效性。本文在確定三指力平衡摩擦接觸點的基礎上,提出一種尋找五指力封閉摩擦接觸點的方法:由已知的三指力平衡摩擦接觸點推導出兩個滿足五指力封閉定理的摩擦接觸點集合,從集合中任取兩點,得到滿足要求的五指力封閉摩擦接觸點。
已知在復雜凸面體中尋找三點力平衡算法。幾何圖述如圖7所示,通過已知三摩擦接觸點Ci,Cj,Cl力封閉抓取,通過任意兩接觸點推導第四、第五接觸點。以Ci接觸點為例,取以ni為法線的摩擦錐Fci與以-nm為法線的摩擦錐Fcim和多邊形邊的交截,作為第四接觸點的集合。同理可推得第五接觸點。由于多邊形與摩擦錐間的交截受到凸多面體本身形狀的約束,所以推導出的接觸點集合不一定連續。
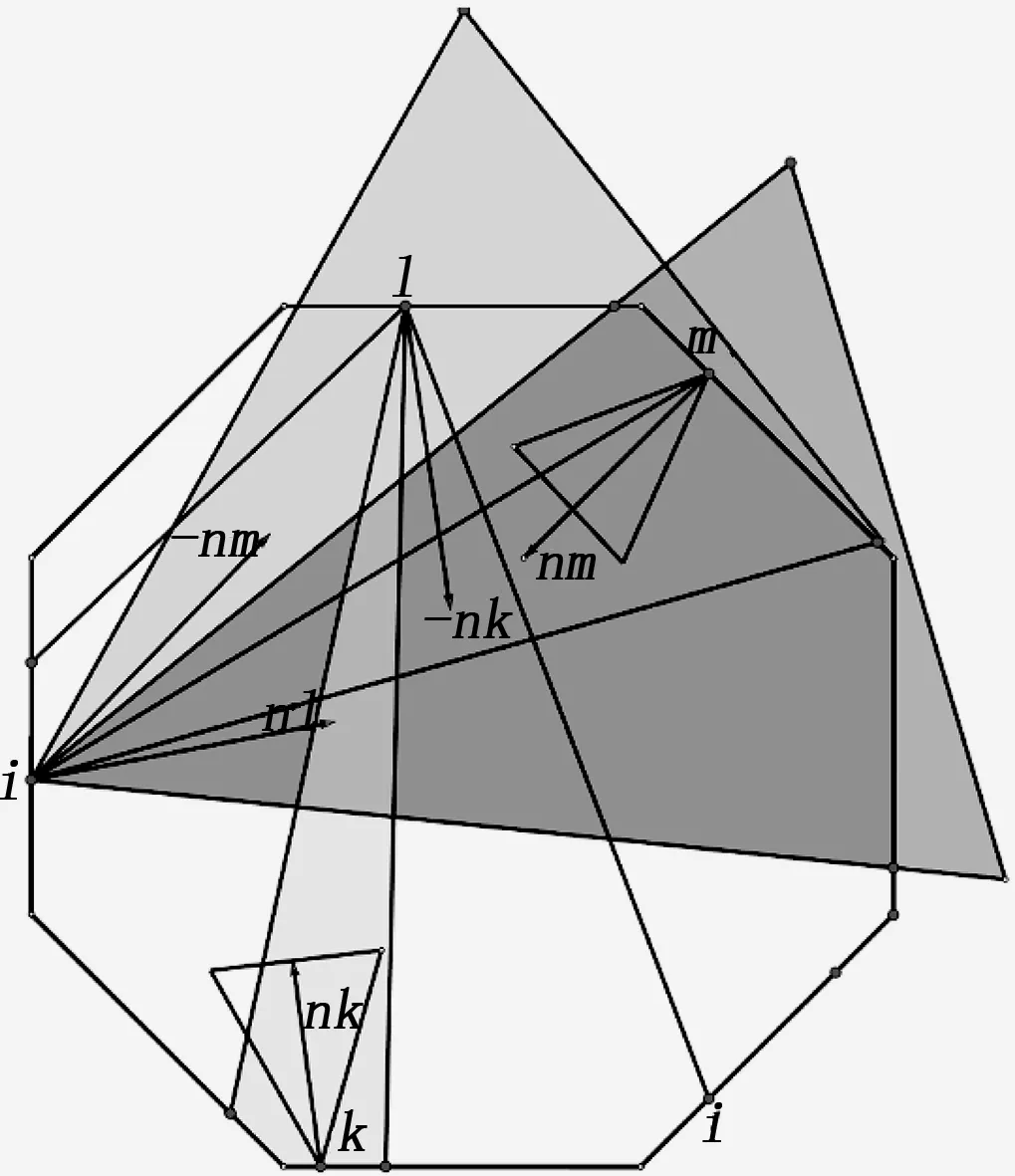
圖7 力封閉點集合的確定
2.6 一種五指力封閉算法的設計
對于凸多面體族,確定五指力封閉算法確定摩擦接觸點的具體步驟如下所示:
步驟1:以被抓取平面超橢圓S1中心作為圓心生成圓OC,使得抓取模型S1與圓OC相交截,得到四個及以上的交截點C1,C2,C3,C4后停止。
步驟2:從得到的交截點中任選三個接觸點C1,C2,C3驗證是否滿足力封閉。如果不滿足,選取其余3種情況進行驗證。若均不滿足,返回步驟1得到新的交截點驗證。
步驟3:將滿足三指力平衡的接觸點C1,C2,C3設為Ci,Cj,Cl,為三指力封閉抓握。計算-ni,nk的夾角φ及-ni,nj的夾角λ,若min(λ,φ)≥2α,則返回步驟1。
步驟4:利用五指力封閉條件(1)確定直線Lc,如果Lc存在,進行步驟5;否則,進行步驟6。
步驟5:若:



步驟7:得到新的摩擦接觸點Cj,Cl,Ck,重復步驟4,得到新的摩擦接觸點Cm。
步驟8:結束計算并返回。
2.7 力封閉算法的抓取流程
力封閉算法完整抓取流程如圖8所示。通過Leap Motion采集器對目標物體進行坐標采集、特征變換,并建立目標物體模型。利用三指力封閉對目標物體抓取平面的超橢圓進行分析,生成三指力封閉點并驗證三指力封閉抓取效果。若三指力封閉抓取失敗,則在三指基礎上生成第四,第五抓取點,驗證五指力封閉抓取效果,直至可以實現穩定抓取。
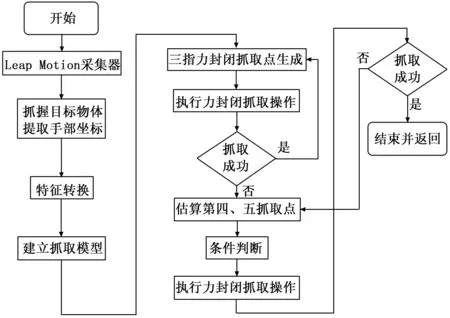
圖8 力封閉算法抓取流程圖
3 五指力封閉算法的實驗驗證
3.1 仿真實驗環境建立
在Matlab下,利用Syngrasp庫建立仿真實驗環境。Syngrasp環境下如圖9所示,設定目標物體形狀參數ax、ay、ε,質量參數m,機械手類型,抓取的摩擦系數μ,各手指力的大小fi(i=1,2,3,4,5) 。設置地面信息與目標物體起始位置信息。若目標物體能夠被抓取,脫離地面,則認定目標物體被穩定抓取,若目標物體未脫離地面,則認定目標物體脫落,未達到穩定抓取的效果。
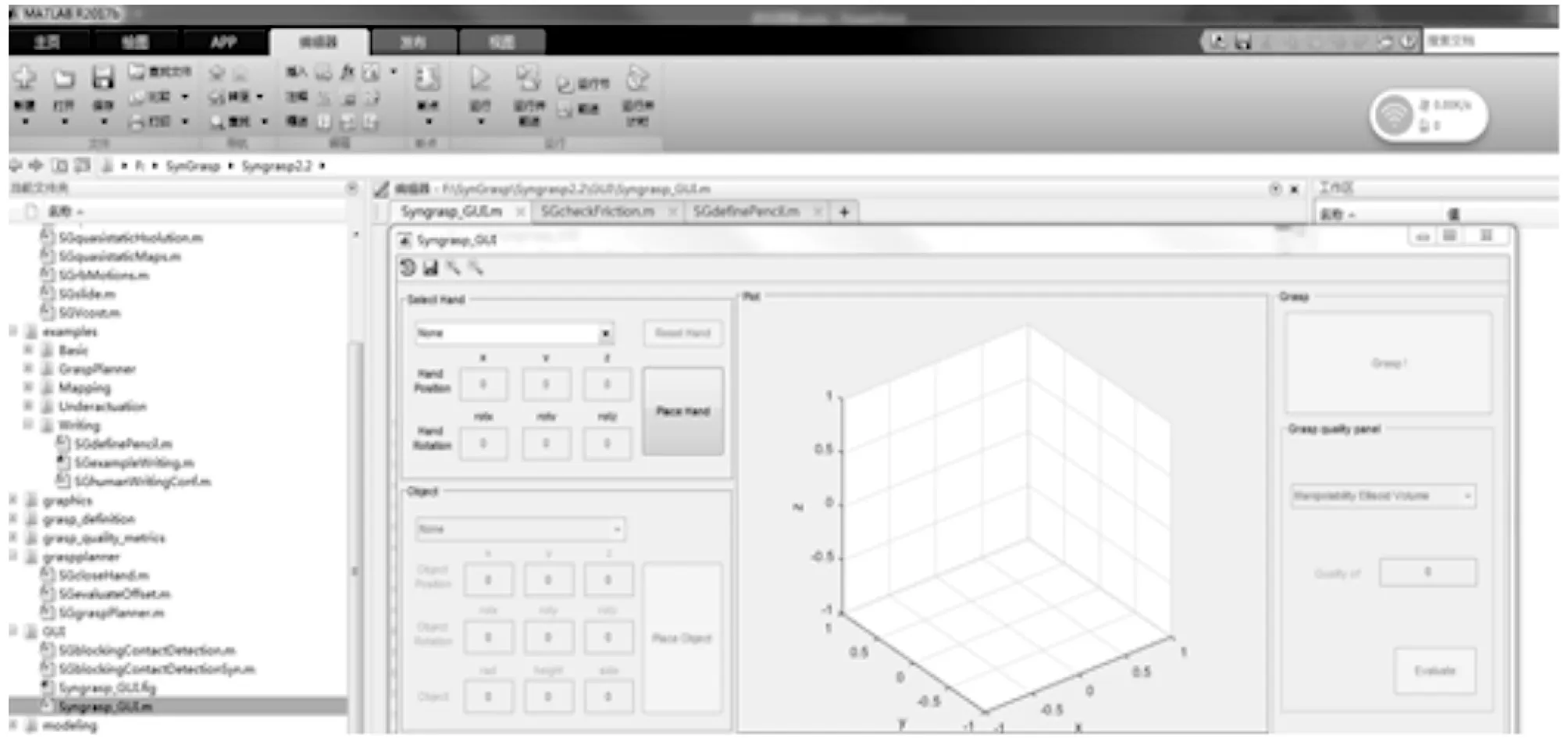
圖9 Syngrasp環境
3.2 五指力封閉算法實驗驗證
本文將分兩部分實驗分別驗證五指力封閉抓取算法的可行性與穩定性。可行性實驗設計通過生成五指力封閉接觸點抓取不同的目標物體進行判斷。若實現穩定抓取,則認為五指力封閉算法具有可行性。穩定性實驗設計在五指力封閉抓取的基礎上,任意脫落兩指關節,形成三指抓取,判斷抓取效果。若在所有可能出現的10種脫落組合中, 7種及以上可以穩定抓取,則認為五指力封閉算法具有抗干擾能力和比三指抓取更好的穩定性。
3.2.1 可行性驗證
圖10所示為基于三指力平衡得到的抓取接觸點。在仿真環境下設定目標物體與接觸點的摩擦錐大小,設定目標物體的材質確定摩擦系數。
根據五指力封閉算法得到摩擦接觸點,將手指接觸點坐標設定為得到的新摩擦接觸點,進行抓取仿真實驗。效果如圖10所示,可以正常抓取目標物體,目標物體不會掉落。證明五指力封閉算法可以得到目標物體的穩定抓取摩擦接觸點,實現穩定抓取的目標。
圖10 五接觸點抓取長方體
3.2.2 穩定性驗證
根據穩定抓取的必要性條件:最少需要三個摩擦接觸點進行實驗設計。在原始五摩擦接觸點的基礎上,進行隨機丟失摩擦接觸點,共計10種情況。如圖11所示,在五指抓取的過程中,丟失食指與無名指的摩擦接觸點,物體依然保持穩定抓取狀態,未發生掉落,證明在丟失食指與無名指的情況下,力封閉算法依然可行。
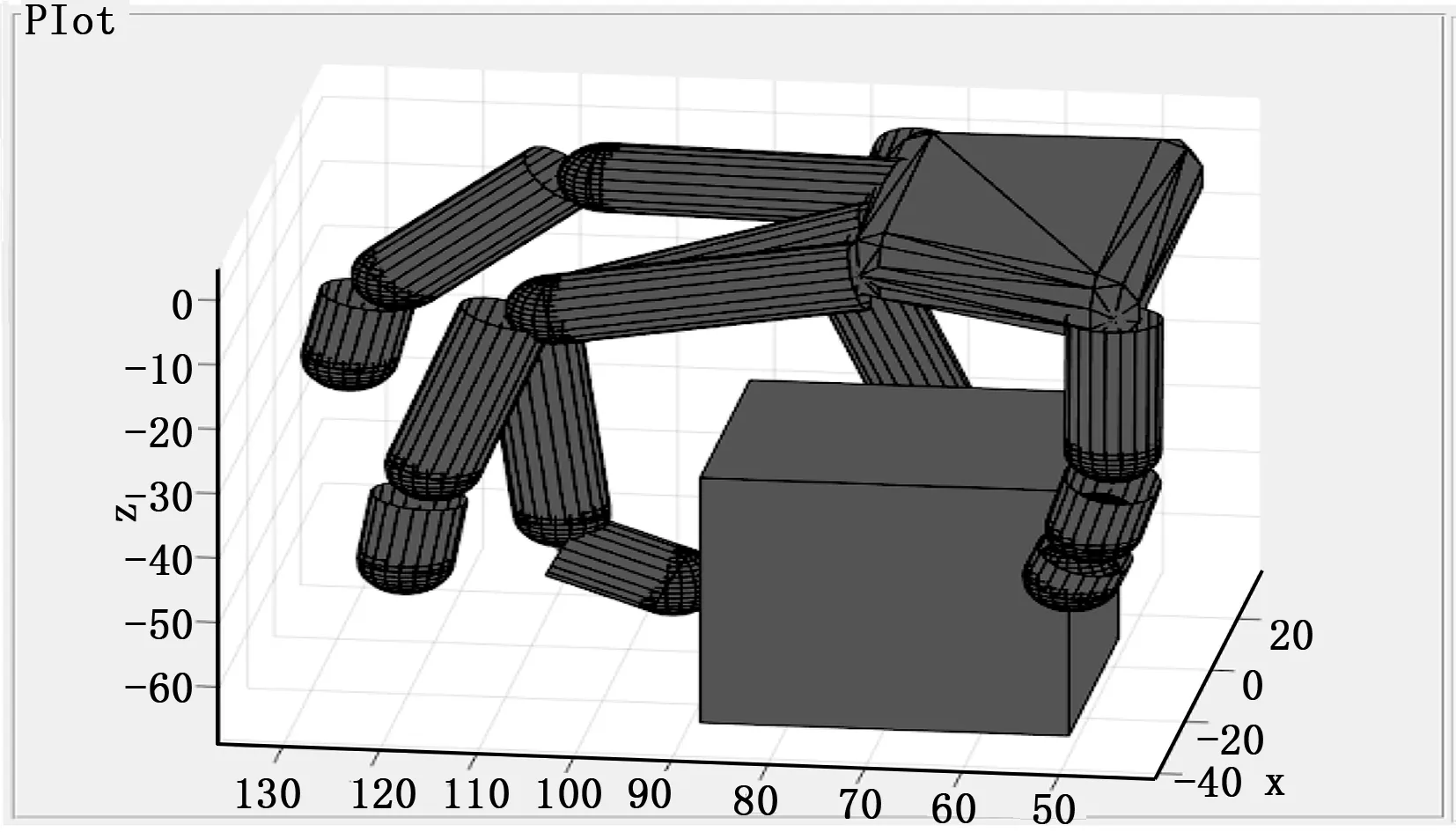

圖11 力封閉抓取長方體效果驗證(丟失食指、無名指)
實驗驗證剩余9種丟失情況,結果如圖12所示。在隨機丟失摩擦接觸點的實驗中,8種情況可依舊穩定抓取。證明五指力封閉算法具有穩定性和抗干擾能力。
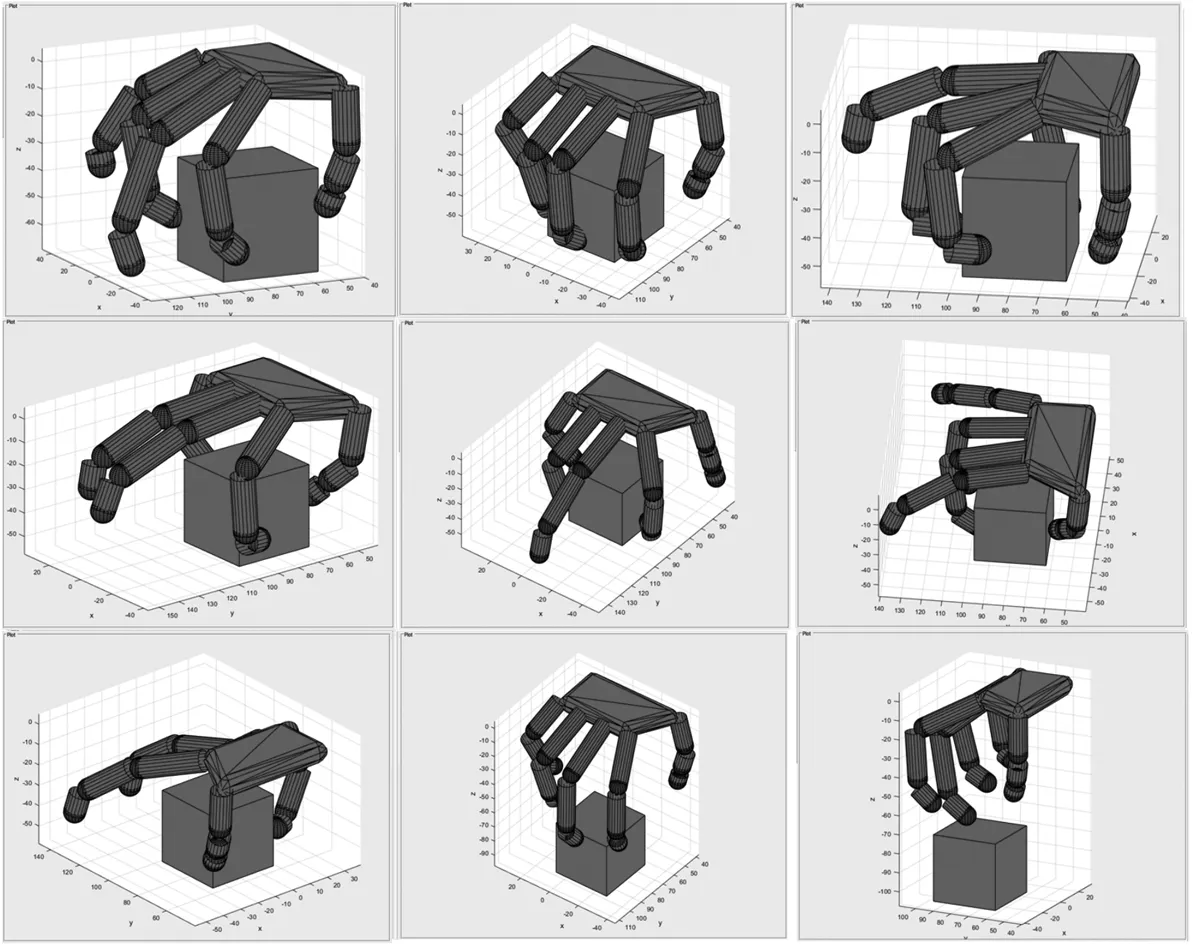
圖12 力封閉抓取長方體結果圖(丟失2個摩擦接觸點)
3.3 不同目標物體的實驗研究
3.3.1 球體抓取可行性驗證
將目標物體替換成球體,進行實驗驗證。圖13所示為五指力封閉算法抓取球體結果。力封閉算法可以正常抓取目標物體,目標物體不會掉落。證明算法可行,實現穩定抓取。
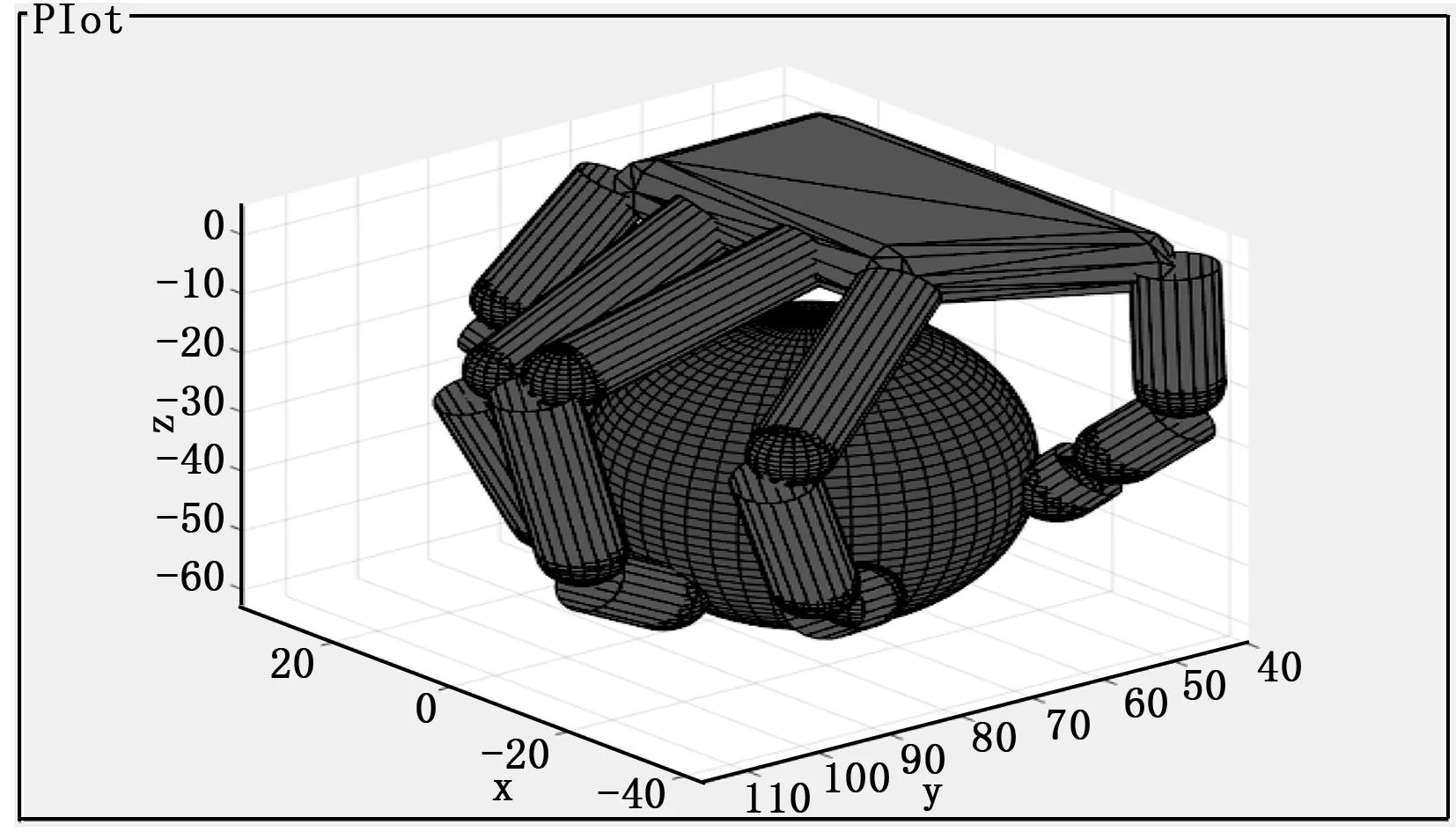
圖13 五接觸點抓取球體
3.3.2 球體抓取穩定性驗證
在原始五摩擦接觸點的基礎上,進行隨機丟失摩擦接觸點。如圖14所示,在五指抓取的過程中,丟失中指與小拇指的摩擦接觸點,物體依然保持穩定抓取狀態,未發生掉落,證明在丟失中指與小拇指的情況下,力封閉算法依然可行。
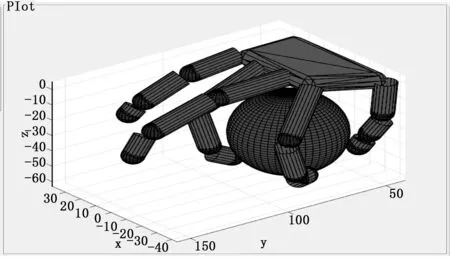
圖14 力封閉抓取球體效果驗證(丟失中指、小拇指)
實驗驗證剩余9種丟失情況,結果如圖15所示。在隨機丟失摩擦接觸點的實驗中,7種情況可依舊穩定抓取。證明五指力封閉算法具有穩定性和抗干擾能力。

圖15 力封閉抓取球體結果圖(丟失2個摩擦接觸點)
3.3.3 圓柱體抓取可行性驗證
將目標物體替換成圓柱體,進行實驗驗證。圖16所示為五指力封閉算法抓取圓柱體結果。力封閉算法可以正常抓取目標物體,目標物體不會掉落。證明算法可行,實現穩定抓取。
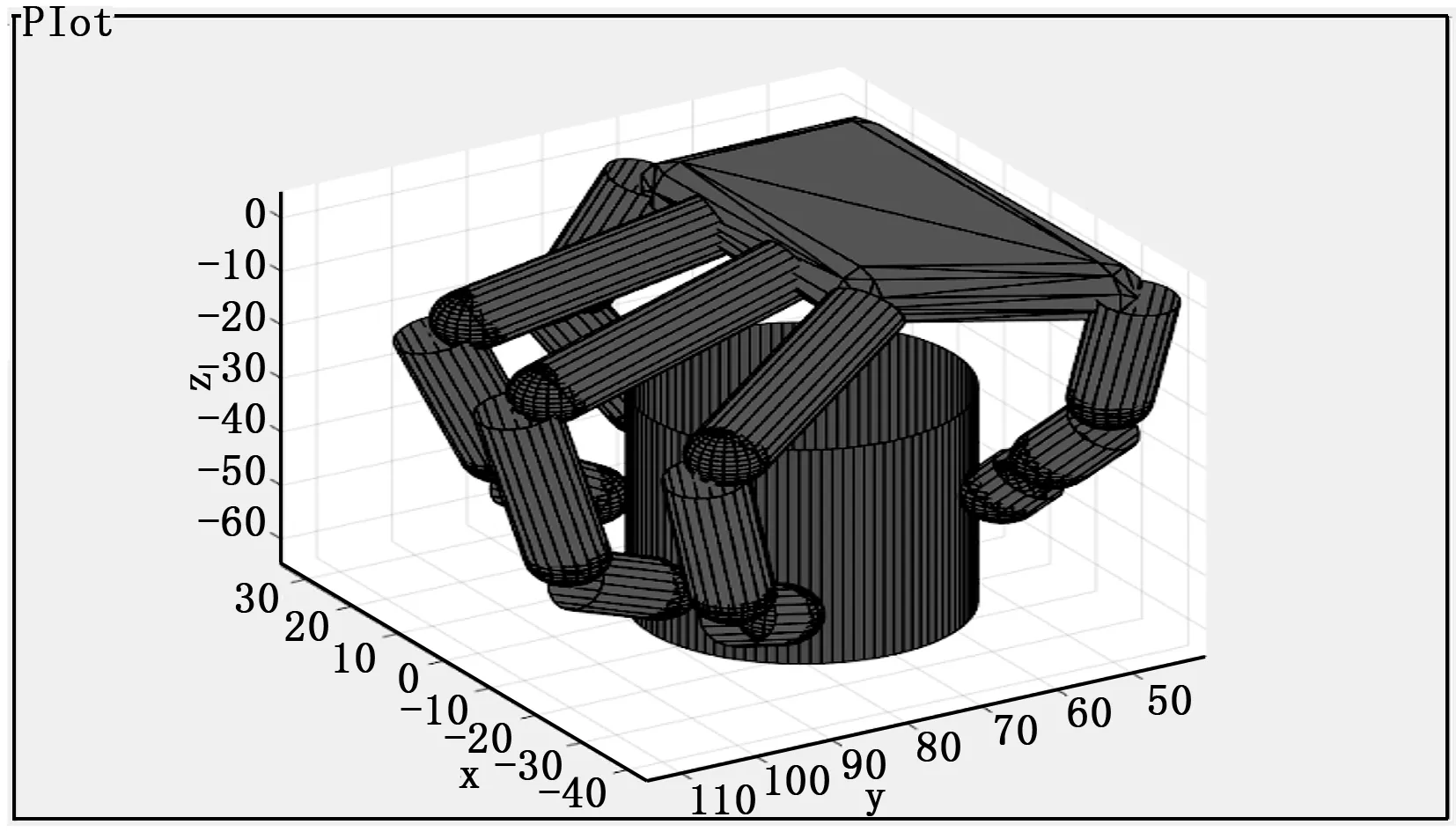
圖16 五接觸點抓取圓柱體
3.3.4 圓柱體抓取穩定性驗證
在原始五摩擦接觸點的基礎上,進行隨機丟失摩擦接觸點,如圖17所示,在五指抓取的過程中,丟失中指與小拇指的摩擦接觸點,物體依然保持穩定抓取狀態,未發生掉落,證明在丟失中指與小拇指的情況下,力封閉算法依然可行。
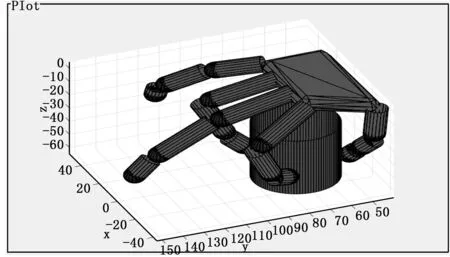
圖17 力封閉抓取圓柱體效果驗證(丟失中指、小拇指)
實驗驗證剩余9種丟失情況,結果如圖18所示。在隨機丟失摩擦接觸點的實驗中,8種情況可依舊穩定抓取。證明五指力封閉算法具有穩定性和抗干擾能力。

圖18 力封閉抓取圓柱體結果圖(丟失2個摩擦接觸點)
4 結論
本文為了使機械手實現穩定的抓取,提出了一種效仿人手抓取的五指力封閉抓取算法,其本質是利用冗余機制解決傳統三指抓取過程中可能出現的抓取不平穩或脫落的問題。首先,基于三指力平衡算法的思想上提出了滿足五指力封閉抓取算法的條件。然后,對五指力封閉抓取算法進行了充分性和必要性的證明。最后,通過仿真環境下的實驗抓取不同目標物體,驗證了五指力封閉算法的可行性。本文的主要貢獻如下:
1)提出一種五指力封閉的抓取方法;
2)給出了五指力封閉算法必要性與充分性的證明;
3)給出了確定五指力封閉抓取點集合的方法;
4)實驗證明了算法的可行性與穩定性。
在仿人機器手抓取實際應用中,僅僅通過目標物體模型得到抓取接觸點還不夠,還需要能夠通過傳感器獲取目標物體信息,自動生成目標物體模型,實現真正的仿人機器手自動抓取。因此,下一步的工作是進行基于Leap Motion體感傳感器的目標物體自動建模,對仿人機器手的抓取作進一步的研究與實現。