
單模型機(jī)動目標(biāo)跟蹤算法仿真
2019-05-29 10:47:42榮慶
山東工業(yè)技術(shù) 2019年14期
關(guān)鍵詞:仿真
榮慶
摘 要:本文針對單模型的機(jī)動目標(biāo),具體闡述了勻加速模型(CA)的應(yīng)用實(shí)例,通過算法仿真分析出這兩個(gè)模型在實(shí)際應(yīng)用中的優(yōu)缺點(diǎn),并且指出CV模型應(yīng)用的局限性,以及CA模型在加速度跳變的時(shí)刻存在一個(gè)收斂的過程,為以后通過改善跟蹤門來解決單模型機(jī)動目標(biāo)跟蹤性能的方案提供參考依據(jù)。
關(guān)鍵詞:機(jī)動目標(biāo);雷達(dá)跟蹤;仿真;勻加速單模型
DOI:10.16640/j.cnki.37-1222/t.2019.14.116
1 提出問題及場景假設(shè)
(1)問題描述。本文研究的例子是二維平面雷達(dá)。然而,當(dāng)發(fā)現(xiàn)目標(biāo)運(yùn)動的時(shí)候,要實(shí)現(xiàn)準(zhǔn)確無誤的追蹤目標(biāo)就顯得有一定難度,因?yàn)橐话闱闆r下,很難十分精準(zhǔn)的預(yù)測運(yùn)動目標(biāo)的下一步狀態(tài)[1]。因此就需要提供準(zhǔn)確的機(jī)動目標(biāo)跟蹤模型。現(xiàn)如今廣泛使用的機(jī)動目標(biāo)跟蹤模型一般為勻速度模型(CV),勻加速模型(CA)以及Signer模型[2]。由于量測數(shù)據(jù)大多含有噪聲和雜波,為了提高目標(biāo)狀態(tài)(位置、速度等)估計(jì)精度,通常要對量測數(shù)據(jù)進(jìn)行預(yù)處理以提高數(shù)據(jù)的準(zhǔn)確度和精度。
(2)場景假設(shè)。假設(shè)有一個(gè)坐標(biāo)雷達(dá)來觀察飛機(jī)上的移動目標(biāo)。移動速度為200米/秒,目標(biāo)的起點(diǎn)為原點(diǎn),勻加速度運(yùn)動在x軸方向上進(jìn)行50-100秒。加速度ax=20m/s,ay=0m/s,并且在x軸的正方向上以100-150s執(zhí)行恒速線性運(yùn)動,實(shí)現(xiàn)目標(biāo)機(jī)動。設(shè)定雷達(dá)的掃描周期T=2秒,針對于目標(biāo)進(jìn)行觀察,其噪聲的標(biāo)準(zhǔn)差等于100米。建立了雷達(dá)跟蹤算法,建立算法仿真。
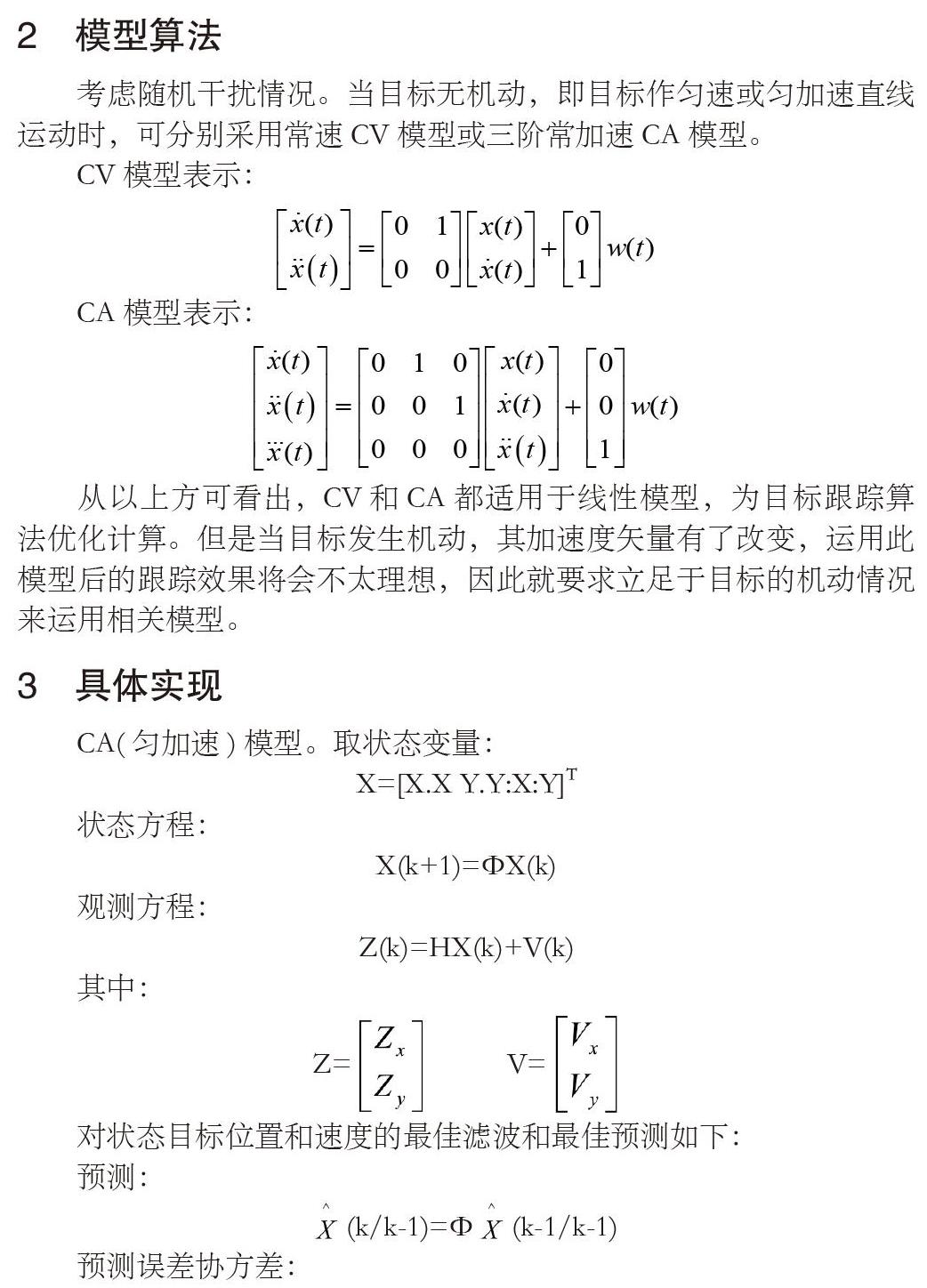
2 模型算法
考慮隨機(jī)干擾情況。當(dāng)目標(biāo)無機(jī)動,即目標(biāo)作勻速或勻加速直線運(yùn)動時(shí),可分別采用常速CV模型或三階常加速CA模型。
從以上方可看出,CV和CA都適用于線性模型,為目標(biāo)跟蹤算法優(yōu)化計(jì)算。但是當(dāng)目標(biāo)發(fā)生機(jī)動,其加速度矢量有了改變,運(yùn)用此模型后的跟蹤效果將會不太理想,因此就要求立足于目標(biāo)的機(jī)動情況來運(yùn)用相關(guān)模型。
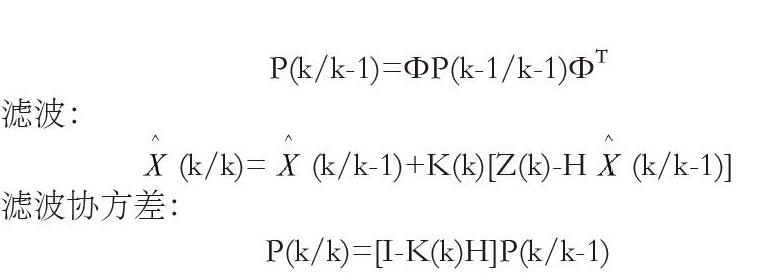
3 具體實(shí)現(xiàn)
4 仿真結(jié)果
仿真程序通過MATLAB平臺來編寫,機(jī)動目標(biāo)跟蹤濾波器采用蒙特卡羅來仿真。并且獲得仿真結(jié)果。
CA模型(左)和singer模型(右)。
由上圖可知,對于位置和速度兩個(gè)指標(biāo)來說,有無雜波基本上不會受到影響,在圖2中可以看出,在50點(diǎn)和100點(diǎn)處,由于加速度發(fā)生跳變,目標(biāo)跟蹤丟失,誤差比較大,但是經(jīng)過一段時(shí)間迭代,又重新收斂。
圖2顯示了CA模型的速度估計(jì)與速度的標(biāo)準(zhǔn)差,由圖可知該算法在濾波開始時(shí)需要一定的收斂過程存在比較大的誤差,并且在加速度突變時(shí),也是存在一個(gè)收斂的過程,這與實(shí)際是相符合的。綜上可知,CA模型在加速度跳變的時(shí)刻存在一個(gè)收斂的過程,當(dāng)達(dá)到收斂時(shí)其在加速段的跟蹤效果比在勻速段跟蹤的效果要好。
5 結(jié)束語
根據(jù)仿真結(jié)果,如果是均勻加速目標(biāo),可以使用CA模型獲得不錯(cuò)的跟蹤效果;然而,如果是大機(jī)動目標(biāo),通常存在機(jī)動跟蹤延遲的問題。CA模型對于弱機(jī)動目標(biāo)和加速度突變情況跟蹤性能較差,雜波對跟蹤性能影響比較大。可以引入Singer模型及“當(dāng)前”統(tǒng)計(jì)模型來跟蹤目標(biāo)。在雜波情況下,可以通過改善跟蹤門來解決性能。
參考文獻(xiàn):
[1]王麗娜.基于卡爾曼濾波的單模型目標(biāo)跟蹤算法的仿真研究[J].中國新通信,2016.
[2]劉楠.基于機(jī)動目標(biāo)跟蹤模型的自適應(yīng)濾波算法[D].浙江理工大學(xué),2016.
猜你喜歡
中國教育技術(shù)裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價(jià)值工程(2016年29期)2016-11-14 02:01:16
電子技術(shù)與軟件工程(2016年18期)2016-11-14 00:46:54
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
