基于動態矩陣的永磁同步直線電機速度控制
2019-06-11 08:27:47薛增濤史雁鵬王蕾永李爭王群京
河北科技大學學報 2019年2期
薛增濤 史雁鵬 王蕾永 李爭 王群京
摘要:為了改善直線電機的動態響應性能,提高電機控制系統的魯棒性,使電機穩定運行,基于預測控制理論,設計了適用于直線電機速度環控制的動態矩陣控制器,將傳統的直線電機三閉環控制系統中的速度環PID控制器替換為動態矩陣控制器,并分別搭建基于PID速度控制器和動態矩陣速度控制器的永磁同步直線電機三閉環仿真模型,在此基礎上給控制系統施加階躍信號,并進行突加負載和突減負載的仿真,將2種控制器控制下的系統響應結果進行對比。仿真結果表明,當速度環采用動態矩陣控制后電機的響應速度更快,超調更小,使電機速度更快達到穩定。改進后的速度環控制器提高了直線電機控制系統的魯棒性,改善了直線電機的動態響應性能,提高了控制系統的抗擾動能力,有利于電機在負載變化較大的情況下運行。
關鍵詞:自動控制理論;直線電機;預測控制;動態矩陣控制;速度環
中圖分類號:TK172文獻標志碼:A
Abstract: In order to improve the dynamic response performance of the linear motor, improve the robustness of the motor control system, and make the motor run stably, based on the theory of predictive control, a dynamic matrix controller suitable for speed loop control of linear motor is designed. The PID controller of speed loop in the traditional linear motor control system is replaced by dynamic matrix controller. The simulation models of the permanent magnet synchronous linear motors with PID controller and dynamic matrix speed controller are built. The step signal is applied to the control system, and the simulation under sudden load and sudden load reduction is completed. The response results of the systems with the two controllers are compared. The simulation results show that when the speed loop is controlled by dynamic matrix, the response speed of the motor is faster, the overshoot is smaller, and the motor speed is stable. The improved speed loop controller improves the robustness of the linear motor control system, the dynamic performance of the linear motor, and the anti-disturbance capability of the control system, which facilitates the operation of the motor under great load change conditions.
Keywords:automatic control theory; linear motor; predictive control; dynamic matrix control; velocity loop
永磁同步直線電機具有諸多優點,與傳統電機相比它的效率更高并且功率密度更大[1-4],因此它被廣泛應用到各種場合,在傳統的直線電機控制方法中,電流環、速度環和位置環都采用PID方法進行控制,但是在一些對速度和精度控制要求較高的場合,PID往往不能滿足人們的要求[5]。目前,對于電流環采用預測控制的研究已經有很多,而且取得了顯著效果,但是在速度環中采用預測控制的研究和探索還較少,而且速度環位于電流環的外側,更有利于擾動的消除,所以對電流環的控制器進行改進也具有重要意義。本文在傳統的控制方法上進行改進,利用動態矩陣控制代替原系統速度環中的PID控制器,使直線電機的速度和精度控制能夠滿足更嚴格的要求。
預測控制是20世紀末出現的一種新型控制算法,最早被應用在工業過程控制領域中,它的出現對復雜的工業控制過程產生了深遠影響,使得成功應用該控制算法的行業取得了巨大的經濟效益。最近幾年預測控制被逐步應用到運動控制領域,其中在永磁同步電機中應用較多。預測控制是一種基于模型的控制算法,這一模型稱為預測模型,在知道被控系統過去的控制信息和將來輸入的情況下,該模型能夠計算出被控系統的未來輸出[6-8]。參考模型的準確度直接影響系統的預測結果和性能,不準確的參考模型會使每個周期內下一時刻的預測值不準確并產生偏差,多個周期后偏差累積,最終導致結果發散,使系統性能得不到保證。預測控制算法有很多種不同的類型,其中最有影響力的有3種:模型算法控制(MAC)、廣義預測控制(GPC)和動態矩陣控制(DMC)[9-11]。由于在系統出現時滯時,使用模型算法控制會使系統產生偏差并且算法會失效,而廣義預測控制通常只用在線性系統中[12],因此本文使用動態矩陣方法完成速度環的控制。動態矩陣控制的模型是一種非參數模型,該模型通過對系統施加單位階躍響應獲得。它適用于漸近穩定的線性裝置,對于不穩定的裝置,一般先用常規PID控制使其穩定,然后再使用DMC算法[6]。DMC算法主要包括3部分:預測模型、滾動優化和反饋矯正。預測模型完成對未來的預測[13-14],滾動優化不僅可以減小計算的工作量,而且可以實時根據系統狀態求出最優解,反饋矯正能夠避免模型失配及未知的干擾因素對被控系統性能產生的影響。
1動態矩陣控制算法
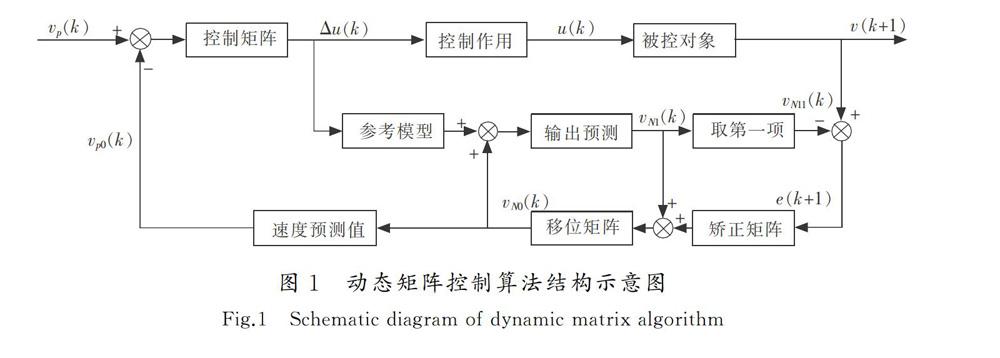
動態矩陣控制算法是由卡特勒于1980年提出,它是一種基于對象階躍響應預測模型、滾動實施并結合反饋校正的優化控制算法[15],其屬于預測控制的一種。動態矩陣控制的整體控制思想是通過模型的歷史信息和未來輸入預測模型的未來輸出。動態矩陣控制的三要素分別是預測模型、滾動優化和反饋矯正[16-19],其結構示意圖如圖1所示。
2控制算法仿真與結果分析
為了驗證動態矩陣控制對永磁同步直線電機速度控制的穩定性,建立了直線電機速度控制的仿真框圖,速度環采用預測控制,為了進行對比,在同一模型下采用PID控制器代替預測控制作為速度環的控制器。PID控制器的參數為KP=10,KI=300,KD=0,動態矩陣控制算法選取N=50,P=10,M=5,R=0,Q=2×E,E為單位矩陣。永磁同步直線電機的主要參數為動子繞組電阻Rs=3.9 Ω,d軸和q軸電感Ld=Lq=6×10-3 H,永磁體磁鏈φf=0.182 7 Wb,動子質量m=1.125 kg,極距τ=16 mm。采樣周期為0.001 s,按照如下步驟進行仿真:在0.01 s時給直線電機速度階躍,階躍值分別為1,1.5,2 m/s,在0.3 s時給電機突加負載。
利用給電機加入-0.4 m/s的階躍信號,表示給電機突加負載的過程,在此基礎上加入0.4 m/s的階躍信號,表示給電機突減負載的過程。0.7 s時給電機突減負載,仿真時間為1 s。速度階躍值為vp=1 m/s時仿真結果如圖2—圖4所示。
從圖2中可以看出直線電機速度環采用預測控制與采用PID控制相比超調更小,預測控制雖然存在一定超調但是在允許的范圍內,不影響直線電機整體性能。速度環采用預測控制后改善了速度的控制效果,最直接的原因是q軸電流控制效果的改善。從圖3中可以看出在仿真過程中q軸電流的變化過程,可以看到采用預測控制后q軸電流在不產生超調的同時更快達到穩定。
從圖3中可以看出當直線電機速度環采用預測控制后,q軸電流超調要遠小于PID控制且更快時間達到穩定。電機啟動后,速度環采用PID控制的電機q軸電流先達到一個較大的峰值,隨后電流回落低于穩定值,經過一段時間的電流調節后q軸電流達到穩態;而速度環采用預測控制的電機,q軸電流從峰值直接減小到穩態值,幾乎不存在超調。
當電機加負載時,q軸電流瞬時升高到一定值,用以增大瞬時推力克服增大的負載力,隨后q軸電流逐漸減小,PID控制在電流產生一定超調后逐漸回到穩定,而預測控制下電流逐漸減小到穩定值,未發生超調;電機突減負載后,從圖3中可以看出,預測控制下電流的瞬時值大于PID控制,但是預測控制下q軸電流仍未發生超調且更快達到穩定,從電機的整個控制過程看預測控制的結果要明顯好于PID的控制結果。
改變直線電機的速度,使其分別以參考速度vp=1.5 m/s及vp=2 m/s運行。在空載時速度達到穩定后對直線電機突加負載,之后突減負載,觀察直線電機的動態性能及動態矩陣控制在不同速度下的適應能力,仿真結果如圖5—圖10所示。
at vp=2 m/s將速度環控制器改為預測控制中的動態矩陣控制后,控制效果會有很大提升,調節時間的微小增加換來的是超調的大幅降低,這更符合實際情況下對電機控制的需要。在突加和突減負載后,兩種控制方法的調節時間基本一致,而預測控制卻不會產生超調。
從q軸電流變化的過程中可以看出,不管在空載電流達到穩定的過程中還是突加和突減負載的過程中,PID控制下的q軸電流都會產生波動,最直接的影響就是會使電機的速度也產生波動,影響電機的動態性能。當速度環在采用預測控制后,q軸電流經過調節后直接達到穩態,不會產生波動,使電機的控制效果優于PID下的控制效果。
從圖中可以看出即使在改變速度的情況下,動態矩陣控制依然具有很好的控制效果。在速度控制中雖然調節時間略微增加但是超調大幅降低,在電流控制中有效抑制了電流的波動,提高了電機的動態性能,因此基于動態矩陣控制的預測控制算法穩定性更好,抗干擾能力更強,魯棒性能更優。
3結語
以永磁同步直線電機為控制目標,將傳統的直線電機速度環中的PID控制器替換為控制性能更好的動態矩陣控制器,設計了基于動態矩陣控制器的直線電機控制系統。以直線電機為被控對象搭建控制系統。由于傳統PID控制器作為速度環控制器的控制系統,超調較大,動態響應時間較長,在此基礎上設計了基于動態矩陣控制的速度環控制器并進行了仿真,使得直線電機動態響應更快,超調時間更小,達到穩定所需要的時間更短,并且有效提高了電機的抗干擾能力。
參考文獻/References:
[1]李爭, 張家禎, 王群京. U型無鐵心永磁同步直線電機磁場建模與分析[J]. 電機與控制應用, 2018, 45(2): 75-80.LI Zheng, ZHANG Jiazhen, WANG Qunjing. Magnetic field modeling and analysis of U-Shaped ironless permanent magnet synchronous linear motor[J]. Electric Machines & Control Application, 2018, 45(2): 75-80.
[2] ?張蘇英, 馬賀明, 墨昭瑾, 等. 基于超螺旋二階滑模的PMSM-DTC系統研究[J]. 河北科技大學學報, 2017,38(2):176-182.ZHANG Suying, MA Heming, MO Zhaojin, et al. Research of PMSM-DTC system based on the super-twisting second sliding mode control[J]. Journal of Hebei University of Science and Technology, 2017, 38(2):176-182.
[3]張蘇英,李林靜,劉慧賢,等. 基于滑模自適應的永磁同步電動機無傳感器控制[J].河北科技大學學報,2016,37(4):382-389.ZHANG Suying, LI Linjing, LIU Huixian, et al . Sensorless control of permanent magnet synchronous motor based on sliding mode adaptive system[J]. Journal of Hebei University of Science and Technology, 2016,37(4):382-389.
[4]DEMIR Y, AYDIN M. A novel dual Three-Phase permanent magnet synchronous motor with asymmetric stator winding[J]. IEEE Transactions on Magnetics, 2016, 52(7):1-5.
[5]HUA Sun, DAI Yunhong. Fuzzy PID control and simulation experiment on permanent magnet linear synchronous motors[C]// International Conference on Electrical and Control Engineering. Wuhan: IEEE Computer Society, 2010:1047-1049.
[6]錢積新, 趙均, 徐祖華. 預測控制[M]. 北京:化學工業出版社, 2007.
[7]ZHOU Junze, LI Xing, ZHU Haitang. Application and simulation of DMC controller in time delay inertial system[C]// Control & Decision Conference. Yantai: IEEE, 2008:1034-1037.
[8]YANG Xiaojun, WANG Yaohui, CHEN Errui, et al. The study of DMC-PID algorithm in the application of photoelectric tracking system[C]// International Conference on Advanced Computer Theory & Engineering. Chengdu: IEEE, 2010:1003-1007.
[9]王悍梟, 劉凌, 吳華偉. 改進型滑模觀測器的永磁同步電機無傳感器控制策略[J]. 西安交通大學學報, 2016, 50(6): 104-109.WANG Hanxiao, LIU Ling, WU Huawei. A sensorless permanent magnet synchronous motor control strategy for improved sliding mode observers with stator parameters identification[J]. Journal of Xian Jiaotong University, 2016, 50(6): 104-109.
[10]SHI Peiming, LIU Bin, HOU Dongxiao. Torsional vibration suppression of drive system based on DMC method[C]// World Congress on Intelligent Control & Automation. Chongqing: IEEE, 2008:1033-1037.
[11]TAO Shen, JING Zhu. Necessary and sufficient conditions for robust stability of DMC[C]// World Congress on Intelligent Control & Automation. Hangzhou: IEEE, 2004:1340653.
[12]王輝, 薛珍珠, 趙留羊,等. 基于動態矩陣的永磁同步電機電流預測控制[J]. 電氣傳動, 2017, 47(4):27-30.WANG Hui , XUE Zhenzhu, ZHAO Liuyang, et al. Current predictive control for PMSM based on dynamic matrix[J]. Electric Drive, 2017, 47(4):27-30.
[13]王明義, 劉家曦, 李立毅,等. 永磁同步直線電機電流預測控制優化設計[J]. 電機與控制學報, 2013, 17(11):28-32.WANG Mingyi, LIU Jiaxi, LI Liyi, et al. Optimization design of predictive current control for permanent magnet linear synchronous motor[J]. Electric Machines and Control, 2013, 17(11):28-32.
[14]劉曉. 空心式永磁直線伺服電機及其驅動控制系統研究[D]. 杭州:浙江大學, 2008.LIU Xiao. Study of the Air-cored Permanent Magnet Linear Servo Motor and Drive System[D]. Hangzhou: Zhejiang University,2008.
[15] 馬文學, 鐘漢樞. 動態矩陣控制研究進展及其應用現狀[J]. 重慶科技學院學報(自然科學版), 2005, 20(1):49-52.MA Wenxue, ZHONG Hanshu. Research progress of dynamic matrix control and its application status[J]. Journal of Chongqing University of Science and Technology(Natural Science Edition), 2005, 20(1):49-52.
[16]JUN Hou, JING Sun, HEALTH Hofmann. Adaptive model predictive control with propulsion load estimation and prediction for all-electric ship energy management[J].Energy, 2018, 16(1): 150-155.
[17]JEAN T, ANDERS H. Enumerative nonlinear model predictive control for linear induction motor using load observer[C]// Ukacc International Conference on Control. Loughborough: IEEE, 2014:1245-1248.
[18]孔小兵, 劉向杰. 永磁同步電機高效非線性模型預測控制[J]. 自動化學報, 2014, 40(9): 1958-1966.KONG Xiaobing, LIU Xiangjie. Efficient nonlinear model predictive control for permanent magnet synchronous motor[J]. Acta Automatica Sinica, 2014, 40(9):1958-1966.
[19]李湘君. 智能預測控制算法及其應用研究[D]. 南京:南京工業大學, 2004.LI Xiangjun. Intelligent Predictive Control Algorithms and its Application[D]. Nanjing: Nanjing University of Technology, 2004.
[20]鄭澤東, 李永東. 永磁同步電機控制系統綜述[J]. 伺服控制, 2011, 12(4): 21-23.ZHENG Zedong, LI Yongdong. Summary of permanent magnet synchronous motor control system[J]. Servo Control, 2011, 12(4): 21-23.
