目標(biāo)大小對(duì)單臂和雙臂動(dòng)作控制特點(diǎn)的影響
2019-06-14 08:47:56王超懿鄒曉峰朱寒笑CharlesShea
天津體育學(xué)院學(xué)報(bào) 2019年3期
關(guān)鍵詞:效應(yīng)
王超懿,鄒曉峰,朱寒笑,Charles H.Shea
日常生活中的很多動(dòng)作,如穿針、系鞋帶、系扣子需要我們兩側(cè)手臂協(xié)調(diào)配合去完成。這些動(dòng)作任務(wù)往往對(duì)動(dòng)作的準(zhǔn)確性有所要求。設(shè)計(jì)本試驗(yàn)的目的,是為了研究目標(biāo)的大小對(duì)于手臂控制特點(diǎn)的影響。
許多動(dòng)作技能,如彈鋼琴或投籃等,運(yùn)動(dòng)者需要同時(shí)兼顧速度和準(zhǔn)確性。在這些運(yùn)動(dòng)技能中,需要在速度和準(zhǔn)確性之間做出權(quán)衡。運(yùn)動(dòng)者要么犧牲速度來(lái)提高準(zhǔn)確性,要么犧牲準(zhǔn)確性以提高運(yùn)動(dòng)的速度。Fitts定律在量化速度—準(zhǔn)確性現(xiàn)象方面發(fā)揮了重要作用[1]。FITTS發(fā)現(xiàn),運(yùn)動(dòng)者手臂在2個(gè)目標(biāo)區(qū)域來(lái)回移動(dòng)時(shí),目標(biāo)區(qū)域的寬度減少或運(yùn)動(dòng)幅度的增加都會(huì)導(dǎo)致目標(biāo)間平均運(yùn)動(dòng)時(shí)間的增加。FITTS提出了一個(gè)對(duì)數(shù)方程來(lái)測(cè)量動(dòng)作難度,稱為難度系數(shù)(ID-index of difficulty),即ID=log2(2A/W),其中A代表兩目標(biāo)中心間的距離,W代表目標(biāo)寬度。FITTS發(fā)現(xiàn),目標(biāo)運(yùn)動(dòng)的難度系數(shù)(ID)與運(yùn)動(dòng)時(shí)間(MT)成線性關(guān)系:MT=a+b*(ID)。運(yùn)動(dòng)時(shí)間和難度系數(shù)的關(guān)系被稱為Fitts定律。Fitts定律被在很多互惠目標(biāo)運(yùn)動(dòng)上進(jìn)行了測(cè)試,并被驗(yàn)證有效[2-5]。
許多學(xué)者系統(tǒng)地研究了不同難度系數(shù)下右臂(單臂)目標(biāo)運(yùn)動(dòng)的控制過(guò)程,并指出高ID和低ID動(dòng)作在運(yùn)動(dòng)學(xué)特征上的不同[6-11]。對(duì)于低難度系數(shù)的運(yùn)動(dòng),動(dòng)作的軌跡平滑并且協(xié)調(diào),一個(gè)動(dòng)作加速和減速過(guò)程的分配比較平均,在目標(biāo)處轉(zhuǎn)折的停留時(shí)間很短或幾乎為零。對(duì)于高難度系數(shù)的運(yùn)動(dòng),動(dòng)作的軌跡不那么平滑且不協(xié)調(diào),一個(gè)動(dòng)作的大部分運(yùn)動(dòng)時(shí)間都被分配到減速的階段,在目標(biāo)處轉(zhuǎn)折的停留時(shí)間會(huì)長(zhǎng)一些。伴隨ID的增加,目標(biāo)運(yùn)動(dòng)的運(yùn)動(dòng)學(xué)特征可以被描述為一種由非連續(xù)性運(yùn)動(dòng)到周期性運(yùn)動(dòng)的轉(zhuǎn)換。周期性控制具有開(kāi)環(huán)控制的特征,反映在較短的運(yùn)動(dòng)和停留時(shí)間以及加速百分比和協(xié)調(diào)指數(shù)的增加。非連續(xù)性控制具有閉環(huán)控制的特征,反映在較長(zhǎng)的運(yùn)動(dòng)和停留時(shí)間以及加速百分比和協(xié)調(diào)指數(shù)的下降[7]。BUCHANAN等[7]指出,周期性控制和非連續(xù)性控制特點(diǎn)的轉(zhuǎn)換主要發(fā)生在ID為4.0~4.9的區(qū)間。
相比于單臂目標(biāo)運(yùn)動(dòng)研究,雙臂目標(biāo)運(yùn)動(dòng)研究的文獻(xiàn)并不多見(jiàn)。KELSO等[12]研究發(fā)現(xiàn),當(dāng)雙臂同時(shí)做不同ID目標(biāo)運(yùn)動(dòng)時(shí),F(xiàn)itts定律不再適用。在KELSO等[12]的經(jīng)典雙臂目標(biāo)試驗(yàn)中,受試者被要求將2個(gè)食指從中線位置盡可能快和準(zhǔn)確地移動(dòng)到位于左右2側(cè)的2個(gè)目標(biāo)區(qū)域。目標(biāo)區(qū)域的大小和到中線的距離,致使2手臂的運(yùn)動(dòng)具有相同或不同的ID。當(dāng)2目標(biāo)的ID不同時(shí),用于執(zhí)行低ID動(dòng)作的手臂運(yùn)動(dòng)時(shí)間被延長(zhǎng),以匹配執(zhí)行高ID動(dòng)作的手臂運(yùn)動(dòng)時(shí)間。作者得出的結(jié)論是,雙臂同時(shí)做不同ID運(yùn)動(dòng)時(shí),內(nèi)在控制機(jī)制限制兩側(cè)手臂去做協(xié)同運(yùn)動(dòng)。也就是說(shuō),雙臂運(yùn)動(dòng)在某些情況下比單臂運(yùn)動(dòng)更難完成。
有關(guān)雙臂協(xié)調(diào)運(yùn)動(dòng)研究,通常是通過(guò)讓左右兩側(cè)肢體做相同或不同模式的周期性屈伸運(yùn)動(dòng)來(lái)完成[13-18]。雙臂協(xié)調(diào)文獻(xiàn)一再表明,同相位(in-phase)協(xié)調(diào)模式是高度穩(wěn)定的,而其他相位協(xié)調(diào)模式運(yùn)動(dòng)穩(wěn)定性相對(duì)弱,并更難完成[16,19-20]。同相位的模式,指雙臂的協(xié)同肌同時(shí)運(yùn)動(dòng);反相位的模式,指雙臂的拮抗肌同時(shí)運(yùn)動(dòng)[14]。當(dāng)運(yùn)動(dòng)者在執(zhí)行同相位或其他相位協(xié)調(diào)模式運(yùn)動(dòng)時(shí),增加運(yùn)動(dòng)頻率,會(huì)導(dǎo)致運(yùn)動(dòng)者的運(yùn)動(dòng)模式從其他類型模式(如反相位模式、有90°相位差、雙臂做不同頻率的模式等)不由自主地轉(zhuǎn)換至同相位模式,而不會(huì)導(dǎo)致從同相位模式轉(zhuǎn)換至其他類型模式[21]。有90°相位差的協(xié)調(diào)模式,可以被理解為一側(cè)手臂總是保持晚于另一側(cè)手臂1/4周期做同樣的動(dòng)作(一次屈伸運(yùn)動(dòng)代表一個(gè)周期)。通過(guò)掃描有0°~180°相對(duì)相位的試驗(yàn),YAMANISHI等[20]發(fā)現(xiàn),所有被測(cè)試的2側(cè)手臂的相位誤差及其變率都比同相位(0°相對(duì)相位)模式高,雖然反相位(180°相對(duì)相位)動(dòng)作較其他(非同相位)模式穩(wěn)定。研究者得出結(jié)論,雙臂協(xié)調(diào)運(yùn)動(dòng)的內(nèi)在機(jī)理是,同相位和反相位以外的協(xié)調(diào)模式都相對(duì)不穩(wěn)定,傾向于向同相位和反相位模式轉(zhuǎn)換[15]。
近些年的研究表明,在完成同相位和反相位之外的相對(duì)相位模式的困難主要是由注意力和感知覺(jué)的限制造成的。然而,這些限制因素可以通過(guò)提供給受試者一個(gè)整合了雙臂關(guān)系的反饋信息,使限制因素最小化。如Lissajous視覺(jué)反饋[22-25],被證明能夠提供給受試者一些有效的信息。這些有效的信息,能夠幫助受試者通過(guò)幾分鐘的練習(xí)就可以快速和有效地完成各種各樣雙臂協(xié)調(diào)任務(wù)。這些雙臂協(xié)調(diào)任務(wù)包括了同相位和反相位之外的其他相位的協(xié)調(diào)模式。Lissajous反饋,將雙臂的位置整合到屏幕上的一個(gè)點(diǎn)上[22-25]。受試者通過(guò)在屏幕上指定的軌跡模版上移動(dòng)光標(biāo),可以完成很多不同模式的雙臂協(xié)調(diào)任務(wù)。
從現(xiàn)有的國(guó)內(nèi)外文獻(xiàn)來(lái)看,盡管很多學(xué)者研究了Fitts定律,而從雙臂的角度對(duì)Fitts定律進(jìn)行的研究還很有限[12,23-25]。通過(guò)改變?cè)贚issajous視覺(jué)反饋運(yùn)動(dòng)模板呈現(xiàn)方法,以及改變?cè)贚issajous視覺(jué)反饋平面上目標(biāo)的位置和大小,本研究將單、雙臂運(yùn)動(dòng)和Fitts運(yùn)動(dòng)的特點(diǎn)結(jié)合起來(lái)。通過(guò)比較單雙臂同相位目標(biāo)運(yùn)動(dòng)的控制特點(diǎn),從而理解雙臂同相位目標(biāo)運(yùn)動(dòng)的控制特點(diǎn)。
1 研究對(duì)象與方法
1.1 研究對(duì)象
本試驗(yàn)選取Texas A&M大學(xué)的16名[6男,10女,年齡(19.88±1.15)歲] 健康成年受試者參與本試驗(yàn)。受試者之前沒(méi)有做過(guò)類似的試驗(yàn)。我們用修改版的Coren偏手性評(píng)價(jià)量表[26]來(lái)評(píng)價(jià)受試者的偏手性。其中,一名受試者偏手性為左利手,其余受試者偏手性均為右利手。
1.2 研究方法
1.2.1 儀器設(shè)備 試驗(yàn)的儀器包括2個(gè)水平控制桿,它們分別由2個(gè)近乎無(wú)摩擦的轉(zhuǎn)軸固定在一個(gè)桌子上。一個(gè)控制桿固定在桌子的左側(cè),由受試者的左側(cè)前臂來(lái)控制;另一個(gè)控制桿在桌子的右側(cè),由受試者的右側(cè)前臂來(lái)控制。旋轉(zhuǎn)軸允許控制桿在桌面以上的水平面轉(zhuǎn)動(dòng)。桿的前端安裝了垂直手柄。受試者需要將肘部置于轉(zhuǎn)軸上方并將前臂與控制桿對(duì)齊,然后手握手柄(手柄的位置可根據(jù)臂長(zhǎng)調(diào)整)。控制桿的旋轉(zhuǎn)角度數(shù)據(jù),由安置在轉(zhuǎn)軸上的角度傳感器測(cè)定。角度傳感器的采樣頻率為200 Hz。實(shí)時(shí)數(shù)據(jù)將用于控制視覺(jué)反饋顯示面上的指針(光標(biāo))的位置。將指示控制桿位置的指針,通過(guò)受試者后上方的投影儀投射到受試者前方2 m的墻上。在視覺(jué)反饋顯示面上,伸或屈左臂會(huì)使光標(biāo)相應(yīng)向上或向下移動(dòng);而屈或伸右臂使光標(biāo)相應(yīng)向左或向右移動(dòng)。一個(gè)木制框架被用來(lái)防止受試者在試驗(yàn)中看到自己的手臂,從而使受試者只能通過(guò)視覺(jué)反饋顯示面上的光標(biāo)來(lái)調(diào)整自己手臂的移動(dòng)。
1.2.2 測(cè)試方法 受試者坐在桌子前面的一個(gè)可調(diào)節(jié)高度的椅子上。在雙臂或單臂的情況下,2個(gè)水平、垂直、或成對(duì)角位置的目標(biāo)框被投影在受試者前方的屏幕上(見(jiàn)圖1)。受試者需要盡可能快并準(zhǔn)確地在2目標(biāo)框間來(lái)回移動(dòng)光標(biāo)。準(zhǔn)確性,是指要求受試者在目標(biāo)框內(nèi)轉(zhuǎn)換光標(biāo)的運(yùn)動(dòng)方向,而不是在超過(guò)或沒(méi)有達(dá)到目標(biāo)框時(shí)轉(zhuǎn)換。在每個(gè)任務(wù)中,2個(gè)目標(biāo)框的大小相同。2個(gè)目標(biāo)框中心之間的距離(A)被設(shè)定為40°和目標(biāo)框?qū)挾龋╓)被分別設(shè)定為14.14°、10°、7.07°、5°、3.54°、2.5°、1.77°和1.25°。根據(jù)Fitts定律(ID=log2(2A/W)),會(huì)對(duì)雙側(cè)或一側(cè)手臂形成難度系數(shù)(ID)為2.5、3、3.5、4、4.5、5、5.5和6的屈伸任務(wù)。一種情況下,試驗(yàn)以ID升序的方式進(jìn)行;另一種情況下,試驗(yàn)以ID降序的方式進(jìn)行。代表每一個(gè)ID的目標(biāo)將會(huì)出現(xiàn)7.5 s然后立即變換到下一個(gè)ID。因此,每次試驗(yàn)嘗試的時(shí)間為60 s。試驗(yàn)分為2種情況:雙臂的情況和單臂的情況。單臂的情況又分為左臂和右臂的情況。試驗(yàn)還分2個(gè)難度系數(shù)順序:升難度系數(shù)順序和降難度系數(shù)順序。在升難度系數(shù)和降難度系數(shù)的情況下每種情況分別做4個(gè)試驗(yàn)嘗試。每種情況的最后1次試驗(yàn)嘗試的數(shù)據(jù)將會(huì)被用于數(shù)據(jù)分析。
1.2.3 數(shù)據(jù)分析 手臂的單臂控制特點(diǎn)可以通過(guò)以下4個(gè)指標(biāo)進(jìn)行評(píng)估:運(yùn)動(dòng)時(shí)間(MT,Movement Time)、停留時(shí)間(DT,Dwell Time)、加速百分比(PTPV,Percent Time to Peak Velocity)和協(xié)調(diào)指數(shù)(H,Harmonicity)。手臂的雙臂控制特點(diǎn)可以通過(guò)以下2個(gè)指標(biāo)進(jìn)行評(píng)估:平均相對(duì)相位和平均相對(duì)相位的變率。
在數(shù)據(jù)分析進(jìn)行之前,將每個(gè)試驗(yàn)嘗試(60 s)的位移序列分割成8段(每個(gè)7.5 s)。每段代表一個(gè)ID情況。在每個(gè)ID位移序列段的基礎(chǔ)上,計(jì)算以上4個(gè)指標(biāo)。
運(yùn)動(dòng)開(kāi)始時(shí)間點(diǎn)、結(jié)束時(shí)間點(diǎn)和加速百分比,是在每個(gè)半周期峰值速度基礎(chǔ)上計(jì)算的。每個(gè)半周期代表一個(gè)屈或伸的動(dòng)作。在每半個(gè)周期內(nèi),運(yùn)動(dòng)開(kāi)始時(shí)間點(diǎn)(Onset)是從峰值速度(PV,Peak Velocity)開(kāi)始向后追蹤到第1個(gè)小于5%峰值速度的時(shí)間點(diǎn);運(yùn)動(dòng)結(jié)束時(shí)間點(diǎn)(Offset)是從峰值速度開(kāi)始向前追蹤到第1個(gè)小于5%峰值速度的時(shí)間點(diǎn)。在目標(biāo)運(yùn)動(dòng)中,增加難度系數(shù)將導(dǎo)致用于準(zhǔn)備后續(xù)周期運(yùn)動(dòng)的(在目標(biāo)區(qū)域轉(zhuǎn)折動(dòng)作的)時(shí)間延長(zhǎng)[27-28]。這段時(shí)間被稱為停留時(shí)間,停留時(shí)間的公式是:DT=Onseti+1-Offseti;運(yùn)動(dòng)時(shí)間的方程是:MT=Offseti-Onseti;加速百分比的公式是:PTPV=(PVi-Onseti)/(Offseti-Onseti)。
加速百分比,用以指示手臂每個(gè)屈或伸運(yùn)動(dòng)有多少比例的時(shí)間用以加速或減速。一般來(lái)講,難度系數(shù)比較低的運(yùn)動(dòng)加速和減速的分配較平均,而難度系數(shù)比較高的運(yùn)動(dòng)大部分時(shí)間都用以減速。在減速的這段時(shí)間里,受試者利用視覺(jué)反饋不斷地調(diào)節(jié)手臂與目標(biāo)之間的距離。
為了計(jì)算協(xié)調(diào)指數(shù),在位移時(shí)間序列中,位移為0的2個(gè)相鄰點(diǎn)之間的區(qū)域被定義為協(xié)調(diào)指數(shù)計(jì)算窗[7,9]。每一時(shí)間窗包括一個(gè)屈-伸(或伸-屈)的轉(zhuǎn)換。在時(shí)間窗內(nèi),在過(guò)濾后的加速度時(shí)間序列中可以觀測(cè)到所有的轉(zhuǎn)向點(diǎn)。當(dāng)在一個(gè)計(jì)算窗內(nèi)所有的轉(zhuǎn)向點(diǎn)為正值或者負(fù)值時(shí),協(xié)調(diào)指數(shù)為加速度絕對(duì)值最小的轉(zhuǎn)折點(diǎn)與加速度絕對(duì)值最大的轉(zhuǎn)折點(diǎn)的比值。當(dāng)一個(gè)計(jì)算窗有且只有一個(gè)加速度單峰值(轉(zhuǎn)向點(diǎn))時(shí),協(xié)調(diào)指數(shù)為1,表示肢體做諧波運(yùn)動(dòng)(harmonic motion)。如果加速度跡線在該計(jì)算窗內(nèi)由負(fù)到正穿越零點(diǎn)(或由正到負(fù)穿越零點(diǎn)),協(xié)調(diào)指數(shù)的值為0,表示非諧波運(yùn)動(dòng)(inharmonic motion)。最后,對(duì)每個(gè)時(shí)間窗下的協(xié)調(diào)指數(shù)求取平均值,得到一個(gè)ID情況下的協(xié)調(diào)指數(shù)的平均值。協(xié)調(diào)指數(shù)的平均值將與經(jīng)驗(yàn)值0.5進(jìn)行比較,用以判斷是否發(fā)生了周期性到非連續(xù)性運(yùn)動(dòng)的轉(zhuǎn)換(或反之亦然)[7,10-11]。協(xié)調(diào)指數(shù)的平均值越大(>0.5),單臂的運(yùn)動(dòng)模式與周期性運(yùn)動(dòng)越接近;協(xié)調(diào)指數(shù)的平均值越小(<0.5),單臂的運(yùn)動(dòng)模式與非連續(xù)性運(yùn)動(dòng)越接近。
在雙臂動(dòng)作任務(wù)的每次嘗試中,每側(cè)手臂的相位角(phase angle)θ被測(cè)量,計(jì)算方法同KELSO等[19]和WANG等[25]研究:在雙臂動(dòng)作任務(wù)的每次嘗試中,每側(cè)手臂的連續(xù)相對(duì)相位(a continuous relative phase measure)c被計(jì)算,以檢驗(yàn)手臂在完成動(dòng)作任務(wù)時(shí)的時(shí)空協(xié)調(diào)情況。若要計(jì)算連續(xù)相對(duì)相位,首先要計(jì)算在每個(gè)采樣點(diǎn)上的連續(xù)相對(duì)相位角。連續(xù)相對(duì)相位角是根據(jù)代表每側(cè)手臂的水平桿的位移(x)和速度時(shí)間序列計(jì)算得出的。位移(x)和速度時(shí)間序列被平均居中,并且重新調(diào)整到-1~1的范圍。對(duì)于每側(cè)手臂,每個(gè)采樣點(diǎn)的連續(xù)相位角的計(jì)算方法如下:
然后,用每個(gè)采樣點(diǎn)對(duì)應(yīng)的左臂的相位角減去右臂的相位角得出相對(duì)相位差:RPi=θ左i-θ右i。取一次嘗試中采樣點(diǎn)相對(duì)相位差的平均值,得到平均相對(duì)相位(relative phase)。平均相對(duì)相位用以指示雙臂的耦合(coupling)程度。相對(duì)相位值越小,指示雙臂的協(xié)同運(yùn)動(dòng)就越緊密。相對(duì)相位的變率(relative phase variability)為一次嘗試中每個(gè)采樣點(diǎn)相對(duì)相位差的變率,用以反映雙臂協(xié)調(diào)模式的穩(wěn)定性[19]。
反應(yīng)單臂控制特點(diǎn)的4個(gè)指標(biāo)將通過(guò)單雙臂(單臂,雙臂)×ID(2.5、3、3.5、4、4.5、5、5.5、6)×左右臂(左,右)×順序(升難度系數(shù),降難度系數(shù))的方差分析。其中,所有情況為重復(fù)測(cè)量因素。丹肯新多重范圍測(cè)試(Duncan's new multiple range test)和簡(jiǎn)單主效應(yīng)分析(simple main effects)被用于進(jìn)一步分析顯著的主效應(yīng)。所有的測(cè)試將使用0.05的顯著水平。
反應(yīng)雙臂控制特點(diǎn)的2個(gè)指標(biāo)將通過(guò)ID(2.5、3、3.5、4、4.5、5、5.5、6)×順序(升難度系數(shù),降難度系數(shù))的方差分析。其中,所有情況為重復(fù)測(cè)量因素。丹肯新多重范圍測(cè)試和簡(jiǎn)單主效應(yīng)分析被用于進(jìn)一步分析顯著的主效應(yīng)。所有的測(cè)試將使用0.05的顯著水平。
2 結(jié)果
雙臂和單臂在不同ID和順序(升或降ID)下,反應(yīng)手臂控制特點(diǎn)的指標(biāo)的描述性數(shù)據(jù)見(jiàn)表1。
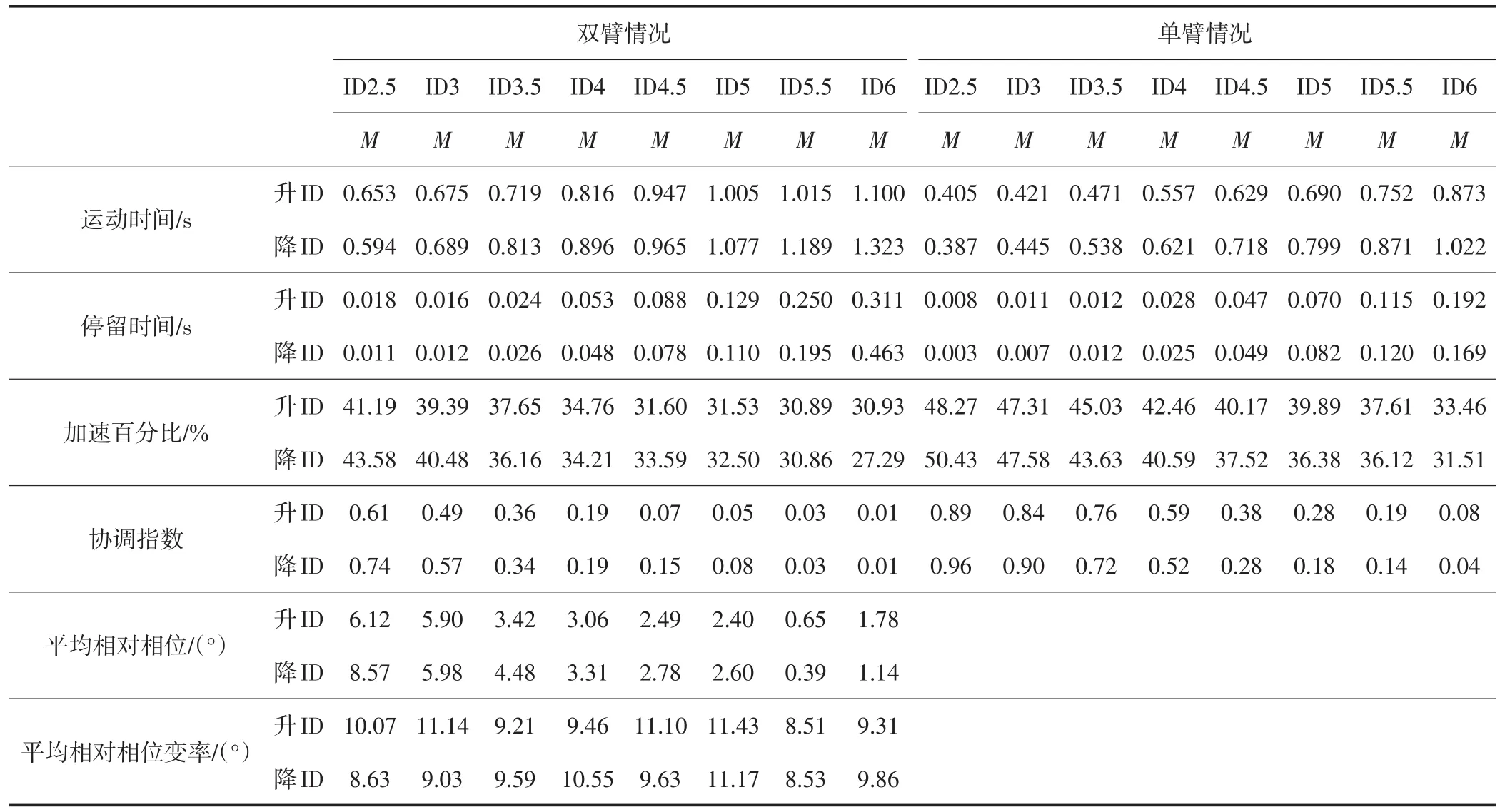
表1 雙臂和單臂指標(biāo)的描述性統(tǒng)計(jì)Table 1 Bimanual and Unimanual Descriptive Statistics
2.1 運(yùn)動(dòng)時(shí)間
運(yùn)動(dòng)時(shí)間的分析檢測(cè)到單雙臂的主效應(yīng)[F(1,14)=32.34,P<0.01] ,ID 的主效應(yīng)[F(7,98)=163.85,P<0.01] 和順序的主效應(yīng)[F(1,14)=4.94,P<0.05] 。此外,順序×ID交互作用[F(7,98)=9.91,P<0.01] 顯著(見(jiàn)圖2A)。雙臂情況(M=0.904 s)的運(yùn)動(dòng)時(shí)間比單臂情況(M=0.637 s)長(zhǎng)。順序×ID交互的簡(jiǎn)單主效應(yīng)分析的結(jié)果表明,隨著ID每增加1個(gè)單位,2個(gè)順序的運(yùn)動(dòng)時(shí)間都增加。順序×ID交互作用的簡(jiǎn)單主效應(yīng)分析的結(jié)果也表明,在ID從5~6的情況下,升ID順序的運(yùn)動(dòng)時(shí)間要比降ID順序的運(yùn)動(dòng)時(shí)間短,但是在其他ID情況下,2個(gè)不同順序之間運(yùn)動(dòng)時(shí)間差異不顯著。
2.2 停留時(shí)間
停留時(shí)間的分析檢測(cè)到單雙臂的主效應(yīng)[F(1,14)=10.23,P<0.01] 和 ID 的主效應(yīng)[F(7,98)=41.13,P<0.01] 。另外,單雙臂×ID交互作用[F(7,98)=5.30,P<0.01] 顯著(見(jiàn)圖 2B)。單雙臂×ID交互作用的簡(jiǎn)單主效應(yīng)的分析結(jié)果表明,隨著ID從4到6,每增加1個(gè)單位,雙臂情況的停留時(shí)間增加,但是ID從2.5到4.5之間的停留時(shí)間差異不顯著,隨著ID從4.5到6每增加1個(gè)單位,單臂情況的停留時(shí)間增加,但I(xiàn)D2.5到5之間ID間停留時(shí)間的差異不顯著。單雙臂×ID交互作用的簡(jiǎn)單主效應(yīng)的分析結(jié)果也表明,雙臂情況的停留時(shí)間在ID從5.5~6處比單臂情況更長(zhǎng),但單雙臂停留時(shí)間的差異在ID值2.5~5處不顯著。
2.3 加速百分比
加速百分比的分析檢測(cè)到單雙臂的主效應(yīng)[F(1,14)=26.28,P<0.01] 和ID的主效應(yīng)[F(7,98)=71.92,P<0.01] 。此外,順序×ID交互作用[F(7,98)=3.77,P<0.01] 顯著(見(jiàn)圖2C)。單臂情況的加速百分比(M=41.121%)高于雙臂情況(M=34.788%)。順序×ID交互作用的簡(jiǎn)單主效應(yīng)分析結(jié)果表明,不論是升ID順序還是降ID順序,隨著ID增加,加速百分比時(shí)間減少。順序×ID交互作用的簡(jiǎn)單主效應(yīng)分析結(jié)果還表明,在ID為2.5時(shí)降ID順序的加速百分比大于升ID順序,但是在ID為6時(shí)升ID順序的加速百分比大于降ID順序。然而,在ID為3~5.5時(shí)沒(méi)有檢測(cè)到2個(gè)順序的加速百分比之間的差異。
2.4 協(xié)調(diào)指數(shù)
協(xié)調(diào)指數(shù)的分析檢測(cè)到單雙臂的主效應(yīng)[F(1,14)=19.45,P<0.01] 、左右臂的主效應(yīng)[F(1,14)=8.64,P<0.05] 和ID的主效應(yīng)[F(7,98)=113.79,P<0.01] 。另外,單雙臂×ID交互作用[F(7,98)=4.85,P<0.01] (見(jiàn)圖2D)是顯著的。左側(cè)手臂的協(xié)調(diào)指數(shù)(M=0.392)高于右側(cè)手臂(M=0.337)。單雙臂×ID交互作用的簡(jiǎn)單主效應(yīng)分析結(jié)果表明,雙手情況的協(xié)調(diào)指數(shù)隨著ID從2.5~5之間每增加1個(gè)單位會(huì)顯著下降,但I(xiàn)D在4.5~6之間的差異不顯著。然而,對(duì)于單臂情況下的所有ID,每增加1個(gè)單位,協(xié)調(diào)指數(shù)降低。單雙臂×ID交互作用的簡(jiǎn)單主效應(yīng)分析結(jié)果還表明,雙臂情況下的協(xié)調(diào)指數(shù)值在ID處于2.5~5的范圍內(nèi)低于單臂的協(xié)調(diào)指數(shù),但單雙臂協(xié)調(diào)指數(shù)的差異在ID值處于5.5~6之間時(shí)并不顯著。
2.5 相對(duì)相位
平均相對(duì)相位的分析檢測(cè)到ID的主效應(yīng)[F(7,105)=32.34,P<0.01] (見(jiàn)圖3)。丹肯新多重范圍測(cè)試結(jié)果表明,ID處于2.5~3范圍內(nèi)的平均相對(duì)相位值顯著高于其他ID,然而在ID處于2.5~3區(qū)間和3.5~5區(qū)間,相鄰ID之間的平均相對(duì)相位差異并不顯著。
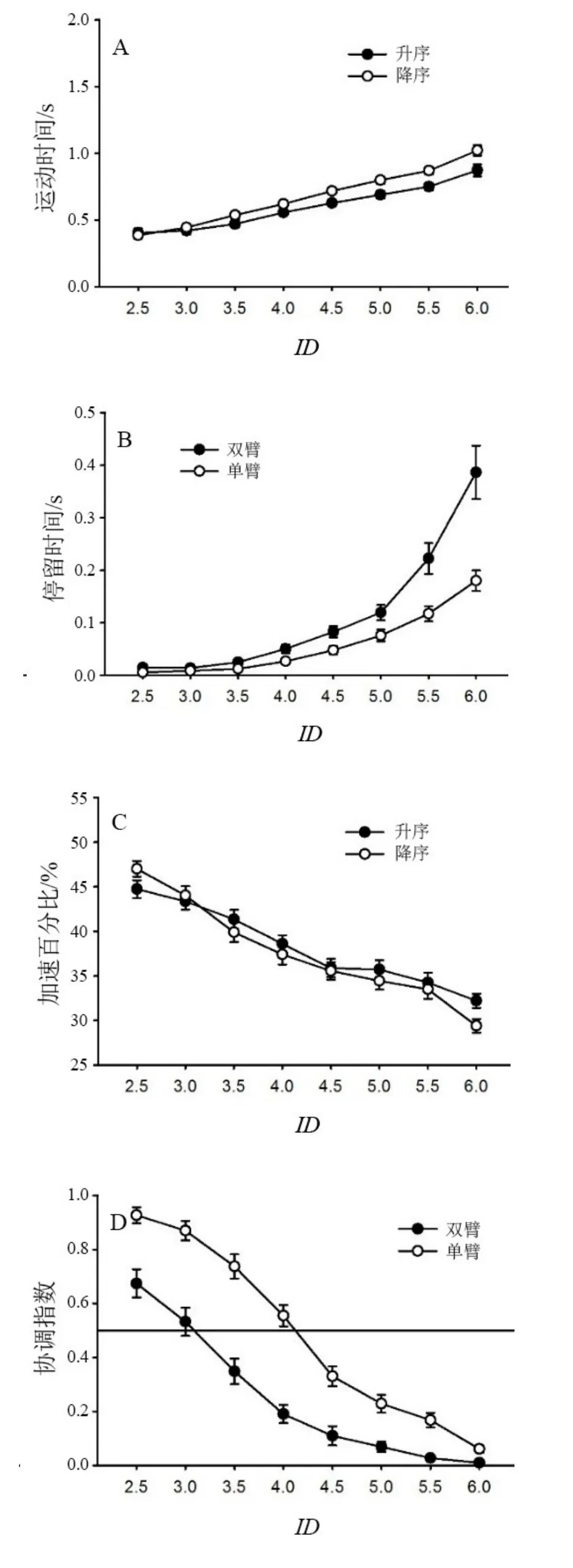
圖2 4個(gè)單臂指標(biāo)Figure2 Four Unimanual Results
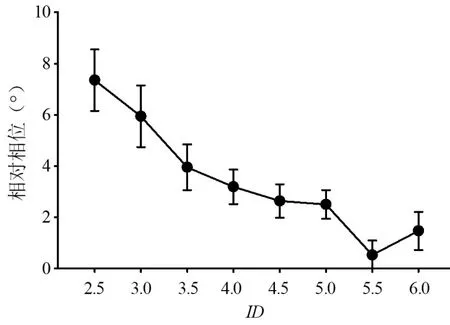
圖3 不同ID下的平均相對(duì)相位Figure3 Mean Relative Phase as a Function of ID
2.6 相對(duì)相位變率
方差分析結(jié)果顯示,相對(duì)相位變率的任何主效應(yīng)或交互作用都不顯著。
3 討 論
試驗(yàn)數(shù)據(jù)表明,無(wú)論是升ID還是降ID順序,還是單臂或雙臂情況,隨著ID增加,手臂的運(yùn)動(dòng)特征逐漸從周期性轉(zhuǎn)變?yōu)閿嗬m(xù)性,并隨著ID減少而從斷續(xù)性運(yùn)動(dòng)切換到周期性運(yùn)動(dòng)。控制特點(diǎn)中的這種切換,可以通過(guò)運(yùn)動(dòng)時(shí)間和停留時(shí)間的增加以及加速百分比和協(xié)調(diào)指數(shù)值的減少來(lái)指示(見(jiàn)表1,圖1)。本試驗(yàn)中,單臂和雙臂的整體控制特點(diǎn),與BUCHANAN等和GUIARD用右側(cè)手臂測(cè)量的研究結(jié)果相一致[7,9-10]。但是,在特定的ID情況下,單臂和雙臂目標(biāo)運(yùn)動(dòng)之間的運(yùn)動(dòng)學(xué)控制也存在一些差異。
在運(yùn)動(dòng)時(shí)間的數(shù)據(jù)分析中發(fā)現(xiàn)顯著的單雙臂效應(yīng)。當(dāng)目標(biāo)寬度在同一個(gè)試驗(yàn)嘗試中被放大或縮小時(shí),雙臂的目標(biāo)運(yùn)動(dòng)比單臂目標(biāo)運(yùn)動(dòng)在所有的難度系數(shù)下的運(yùn)動(dòng)時(shí)間更長(zhǎng)。在停留時(shí)間的分析中發(fā)現(xiàn)了顯著的單雙臂×難度系數(shù)的交互作用。單雙臂×難度系數(shù)的簡(jiǎn)單主成分分析結(jié)果說(shuō)明,兩側(cè)手臂在高難度系數(shù)下,雙臂目標(biāo)運(yùn)動(dòng)都比單臂目標(biāo)運(yùn)動(dòng)的停留時(shí)間長(zhǎng)。以上運(yùn)動(dòng)時(shí)間和停留時(shí)間的結(jié)果表明,雙臂的目標(biāo)運(yùn)動(dòng)比單臂目標(biāo)運(yùn)動(dòng)需要更多感知覺(jué)信息處理的要求,特別是在高難度系數(shù)的情況下。
在協(xié)調(diào)指數(shù)的分析中發(fā)現(xiàn)了顯著的單雙臂×難度系數(shù)的交互作用。從協(xié)調(diào)指數(shù)的圖中(見(jiàn)圖2D)可以看出,協(xié)調(diào)指數(shù)跨越0.5的區(qū)域在雙臂的情況下發(fā)生在ID4和ID5之間,但是在單臂的情況下發(fā)生在ID3和ID4之間。BUCHANAN等[7]指出,當(dāng)系統(tǒng)增加或減少I(mǎi)D時(shí),控制策略由周期性向斷續(xù)性轉(zhuǎn)換的協(xié)調(diào)指數(shù)的臨界值為0.5。協(xié)調(diào)指數(shù)的分析結(jié)果說(shuō)明,在雙臂的情況下,手臂周期性和斷續(xù)性控制策略間的轉(zhuǎn)換更容易出現(xiàn)在高ID區(qū)域。這表明,在相同難度系數(shù)下,雙臂情況比單臂情況更需要非連續(xù)性的控制策略。這是由于,雙臂共同做目標(biāo)運(yùn)動(dòng)使受試者占用更多的運(yùn)動(dòng)資源,導(dǎo)致使用非連續(xù)性控制策略的趨勢(shì)更為顯著。
在平均相對(duì)相位的分析中發(fā)現(xiàn)了顯著的ID主效應(yīng)。從平均相對(duì)相位的圖中(見(jiàn)圖3)可以看出,平均相對(duì)相位的耦合程度隨著難度系數(shù)的增加不斷增強(qiáng)(值變小)。在相對(duì)相位的變率分析中,任何主效應(yīng)和交互作用都不顯著。這表明,增加難度系數(shù)雖然使雙臂的耦合變得更緊密,但是并沒(méi)有使雙臂的協(xié)調(diào)變的更加穩(wěn)定。
4 結(jié)論
(1)無(wú)論是升ID還是降ID順序,還是單臂或雙臂情況,隨著ID增加,手臂的運(yùn)動(dòng)特征逐漸從周期性轉(zhuǎn)變?yōu)閿嗬m(xù)性,并隨著ID減少而從非連續(xù)性運(yùn)動(dòng)切換到周期性運(yùn)動(dòng)。(2)雙臂的目標(biāo)運(yùn)動(dòng)比單臂目標(biāo)運(yùn)動(dòng)需要更多感知覺(jué)信息處理的要求,特別是在高難度系數(shù)的情況下。(3)在相同難度系數(shù)下,雙臂情況比單臂情況更需要非連續(xù)性的控制策略。這是由于雙臂共同做目標(biāo)運(yùn)動(dòng),使受試者占用更多的運(yùn)動(dòng)資源,導(dǎo)致使非連續(xù)性控制策略的趨勢(shì)更為顯著。(4)增加難度系數(shù)(目標(biāo)變小)雖然使雙臂的耦合變得更緊密,但是并沒(méi)有使雙臂的協(xié)調(diào)變的更加穩(wěn)定。
猜你喜歡
核科學(xué)與工程(2021年4期)2022-01-12 06:30:26
今日農(nóng)業(yè)(2020年19期)2020-12-14 14:16:52
小學(xué)生必讀(中年級(jí)版)(2020年9期)2020-12-04 02:07:22
科學(xué)大眾(2020年17期)2020-10-27 02:49:10
紅土地(2018年11期)2018-12-19 05:10:56
意林·全彩Color(2018年9期)2018-11-13 22:49:38
中學(xué)物理·高中(2016年12期)2017-04-22 11:53:03
中國(guó)衛(wèi)生(2016年4期)2016-11-12 13:24:14
中國(guó)衛(wèi)生(2014年4期)2014-12-06 05:57:14
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30
 天津體育學(xué)院學(xué)報(bào)2019年3期
天津體育學(xué)院學(xué)報(bào)2019年3期
- 天津體育學(xué)院學(xué)報(bào)的其它文章
- 基于補(bǔ)短板視角下我國(guó)體育產(chǎn)業(yè)發(fā)展的內(nèi)在訴求與路徑選擇
- 論我國(guó)體育體制的管理主義取向及其消解
——兼論體育體制與體育管理體制的分化 - 關(guān)于“課程思政”的幾個(gè)基本問(wèn)題
——基于體育“課程思政”的思考 - 基于24式太極拳促進(jìn)平衡影響因素的研究
- 基于“委托代理”理論的國(guó)際足聯(lián)腐敗探究
- 網(wǎng)球運(yùn)動(dòng)“Choking”發(fā)生誘因的質(zhì)性探索:來(lái)自高校優(yōu)秀運(yùn)動(dòng)員個(gè)案的縱向觀察