溫室用小型多功能電動履帶式作業平臺設計
2019-06-20 11:36:08崔志超管春松陳永生高慶生楊雅婷
農業工程學報 2019年9期
關鍵詞:作業
崔志超,管春松,陳永生,高慶生,楊雅婷
(農業農村部南京農業機械化研究所,南京 210014)
0 引 言
目前,溫室果蔬生產過程中的耕整地及播種環節作業環節已實現機械化作業,但高架吊蔓類果蔬的中期管理和采運輸送環節仍主要靠人工完成,存在勞動強度大、作業效率低等問題,嚴重制約了果蔬生產全程機械化的發展速度[1-4]。為此,歐美等國在上世紀20年代初率先開始高空作業車方面的研究,到上世紀60年代美國將高空作業車運用到蔬果作業中,用來輔助人工完成修剪及收獲等工作,隨后研制出液壓式升降平臺,配套采摘機具,為升降作業平臺車的發展奠定了基礎[5]。緊隨其后,澳大利亞也成功研制出可用于單人操作的升降平臺,可實現上升、下降、前進、后退和轉彎[6]。歐美國家研發的作業平臺其行走機構主要為輪式,適合于露地標準化種植的蔬菜園區和果園。而在溫室及丘陵山地等小地塊方面,日本多選擇履帶式行走機構,可實現平面內任意位置的作業,機動性較強。同時針對溫室結構緊湊和作業重復性高的特點,國外如荷蘭 PRIVA公司推出了 Berg Hortimotive系列帶液壓剪叉升降機的管道車[7],國內如北京京鵬環球股份有限公司開發出電動溫室采摘車[8],此類溫室采摘車皆行駛在鋪設的固定平行管道上,作業長度受鋪設管道范圍而定,對固定設施的投入相對較高,通用性相對較差。
中國于上世紀90年代成功研制出第一臺液壓升降平臺,并開始應用于農業生產[9]。目前,中國研制的多功能作業平臺主要有自走輪式、自走履帶式和懸掛折臂式 3種,如:程健等[10-11]均研制出果園大型輪式液壓作業平臺,適用于果園高大樹木;劉大為等[9,12-13]均研發了油動履帶自走式作業平臺,適用于丘陵山地;樊桂菊等[14-15]均研制了折臂式作業平臺,需與拖拉機或專屬車輛配合作業,掛接后尺寸較大。總體來講,國內多偏重露地果園作業平臺的研究,且多采用內燃機作為動力源,存在能耗高、噪音大,尾氣排放多,環境污染大,且操作復雜,結構尺寸大,在露天果園應用尚可,不適合封閉環境下溫室大棚內作業。
因電能、太陽能、風能等清潔能源具有零排放、利用率高等優點正逐步在農業生產中得到利用,以電動拖拉機、電動微耕機為代表的綠色環保型電動農機近些年在國內外得到研發與推廣[16-18],對溫室用作業平臺的設計具有借鑒意義,尤其適合溫室密閉環境。為此,本文結合現代溫室結構的特點,設計了一種溫室用電動作業平臺,對其關鍵部件及控制系統進行分析,并進行樣機作業性能臺架試驗及田間驗證試驗,以期為溫室內果蔬的中期管理與采運提供合適的通用作業平臺,從而減輕農民勞動強度,進而提高溫室生產的機械化水平。
1 整機結構與原理
1.1 設計要求
為適應現代溫室結構,采用清潔能源為動力,提高運載能力及作業續航時間,升降高度自由調節,室內作業靈活輕巧,以減少人工投入、提高作業效率為目的,同時兼具良好的通過性、安全性及可靠性。根據現代設施農業園區農業裝備配套規范[19],設施大棚為保證機械進入和回轉,一般跨度為8 m,高度不低于3.2 m,肩高1.8 m,長度不小于40 m,田間路寬1~2 m。結合實際生產需要具體設計要求如表1所示。
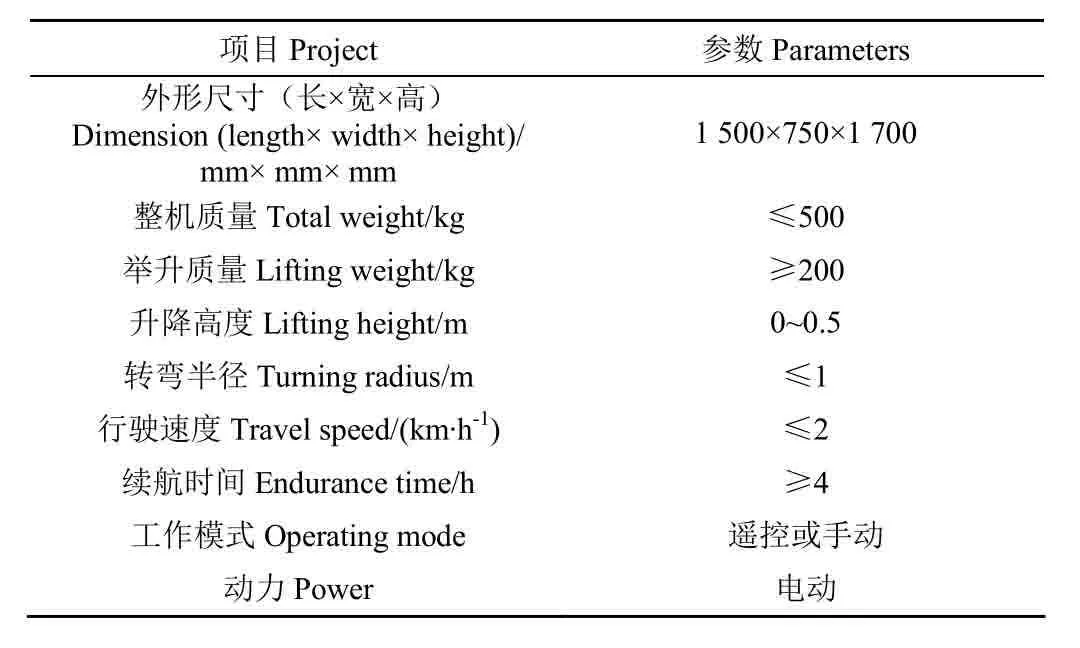
表1 電動作業平臺設計要求Table 1 Design requirements of electric platform
1.2 整機結構及工作原理
整機結構如圖 1所示,主要由護欄、工作臺、升降裝置、底盤、電池組等組成。其中升降裝置由液壓泵、液壓缸、剪叉等組成,液壓泵安裝在底盤內部,與液壓缸連接;液壓缸兩端分別與底盤和剪叉連接,剪叉下部與底盤連接,上部與安裝有護欄的工作臺連接;底盤中間位置設置安裝有電池組,為整機提供動力;整機在滿足正常作業要求的前提下可選擇性的掛接拖車適當增加裝載容量。
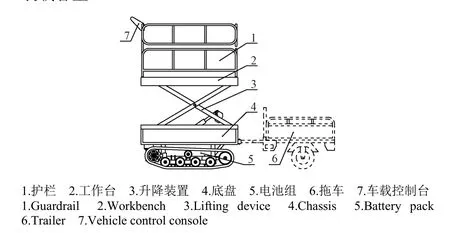
圖1 電動作業平臺結構示意圖Fig.1 Structure diagram of electric platform
電池箱內的電池組經電源轉換模塊與主控板、電機、液壓泵站連接,主控板將控制指令以電信號進行轉換。升降作業時,操縱遙控器或車載控制臺的升降按鈕發出通訊指令,主控板接收到指令后轉換成電信號傳遞給液壓泵站上的控制器,控制器控制液壓泵站運轉,通過液壓油實現液壓缸的伸縮運動,從而推動剪叉上下運動,帶動工作臺升高或下降。行走或后退作業時,操縱遙控器或車載控制臺前進或后退按鈕發出通訊指令,主控板接收到指令后轉換成電信號傳遞給電機控制器控制電機運轉,兩電機同時得正電,實現平臺的前進,反之,平臺后退。轉彎作業時,操縱遙控器或車載控制臺左轉或右轉按鈕發出通訊指令,主控板將指令轉換成電信號傳遞給電機控制器,當按下左轉按鈕時,左側電機正轉右側電機反轉,平臺原地左轉,反之,平臺原地右轉。
2 關鍵部件設計
2.1 底 盤
考慮到作業平臺一方面提升作業時重心較高,對穩定性要求較嚴格,另一方面果蔬中期管理及采運等是周期循環性工作,會對土壤造成反復鎮壓,易造成土壤板結[20-21],故該平臺優先選用履帶式底盤行走裝置。增大與土壤的接觸面積,既可增大復雜路況運行穩定性,又可減小土壤單位面積壓強,保證土壤的疏松性。底盤結構如圖 2所示,由底盤機架、電機、滾動輪、橡膠履帶和電路系統等組成,滾動輪全部安裝在滾輪支架上,分為主動輪、支重輪、托帶輪和導向輪,滾動輪上安裝橡膠履帶,電機分別驅動左右履帶的主動輪。

圖2 底盤結構示意圖Fig.2 Schematic diagram of chassis structure
假設實際工作中總計算質量為整機質量與舉升質量之和,則電機及減速機的選型參數計算如下。
平臺牽引力Fq

電機功率P

式中μ為摩擦系數,考慮橡膠與混凝土之間的摩擦系數在0.3~0.5之間[22],本作業平臺需在田間作業,所以取最大值0.5;m為總計算質量,kg,此處取700 kg;g為重力加速度,取9.8 m/s2;η為電機效率,此處取0.8;v為平臺移動速度,km/h,此處取2 km/h。據此計算可得知電機功率為2.3 kW。考慮平臺工作于田間復雜路況的場合,運行阻力較大,因此左右履帶各配備一臺由淄博博山山特電機廠生產額定功率1.2 kW、額定電壓48 V、額定電流25 A、額定轉速1 000 r/min的2YT系列直流電機。
則主動輪與電機之間的傳動比i為

式中n為主動輪轉速,r/min;n1為電機轉速,r/min,此處取1 000 r/min;r為履帶主動輪半徑,考慮溫室內作業空間底盤宜低矮化,此處取0.1 m,則計算可知i為1:15,即為每臺電機配套同電機廠生產傳動比1:15的RV075-15型減速機。
底盤采用逆向轉向原理依靠改變兩履帶驅動輪的轉動方向,使其實現原地轉彎。如圖 3所示,左右履帶各自向Vm1和Vm2方向轉動且轉動速度相同,由于兩履帶距離底盤中心Q的力臂相等,因此力矩MQ=0,QZ即為底盤最大原地轉彎半徑
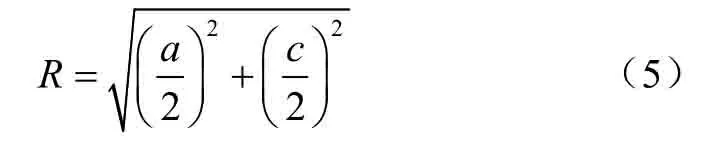
式中a為底盤總長度,mm;c為底盤總寬度,mm,計算得底盤最大轉彎半徑R=838.5 mm。由于履帶與地面接觸摩擦力較大,底盤轉彎時會出現偏差,根據現代設施農業園區道路寬度在1~2 m的要求[20],因此底盤實際轉彎半徑<1 m時即可認定合格。
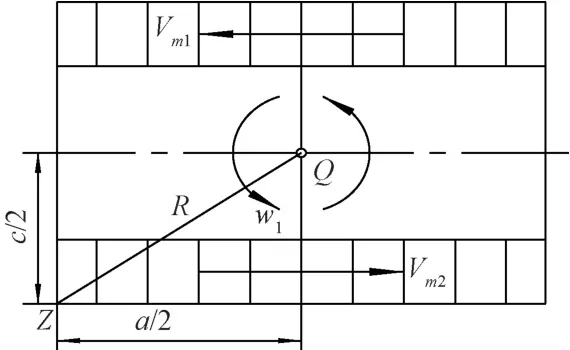
圖3 底盤轉向原理Fig.3 Principle of chassis swerve
2.2 電池組
電機正常運轉時的電流通常為額定電流的一半[23],則兩臺電機正常運轉時所需總電流I為25 A。據設計要求可知平臺續航時間t需達到4 h,則所需提供給2臺電機工作的電池組容量C為

則計算可知電池組容量C為100 A?H。因電機額定電壓為48 V,故選用8塊單體額定電壓12 V、額定電流為50 A的超燕6-EVF-50型蓄電池,將其中4塊單體先各自串聯后再并聯,即可滿足電機的工作需求。
2.3 升降裝置
2.3.1 推力模型建立
因剪叉式升降機構具有較高的穩定性和承載能力[24-25],同時考慮到溫室內高架吊蔓果蔬的生長高度約為 2~3 m,故選擇單剪叉即可滿足升降需求,具體結構如圖 4所示。A點和 B點分別與底盤和工作臺固定鉸鏈連接,為2個轉動副;C點和I點通過滾輪分別與底盤和工作臺的滑道相切連接,為 2個移動副;O點是兩剪叉臂中間鉸接點,為轉動副;液壓缸活塞桿上端與剪叉臂AC鉸接于F點,下端與底盤鉸接于E點。
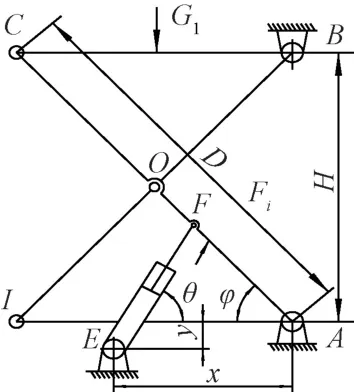
圖4 升降裝置原理Fig.4 Principle of lifting device
在升降高度固定的情況下,起升角φ與剪叉臂D呈負相關關系。起升角 φ過大會導致整車平穩性下降,起升角φ過小會造成剪叉臂D材料用量的增加,經文獻檢索知φ∈(0~30°)為佳[26],故當工作臺到達最高位置時,此處起升角φ取30°,并對其進行受力分析。

起升角φ、剪叉臂D、升降高度H三者之間的關系為式中H為起升高度,此處取0.5 m,計算可得D為1 m。
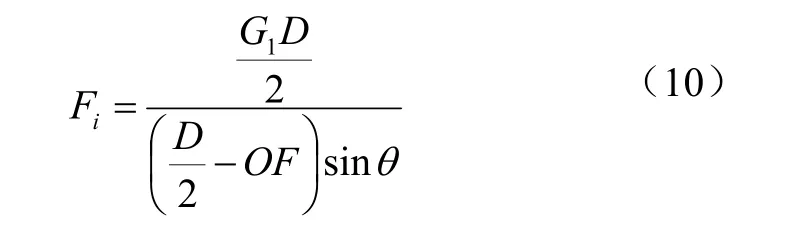
因液壓缸的負荷變化隨起升角 φ增大而逐漸減小,在載重一定的情況下,液壓缸在初始位置,即 φ等于 0時受力最大,故對在該狀態下的升降裝置進行受力分析,剪叉臂D繞A點旋轉,由力矩平衡方程

即

由此計算知剪叉在初始位置時液壓缸推力Fi為
2.3.2 仿真優化
剪叉在初始臨界狀態下的提升力為液壓缸最大推力,為求得液壓缸在初始位置時的最大可靠推力,考慮安全余量,取安全系數為2,即平臺的最大載荷G1設為400 kg,則單側剪叉各自承受G1/2即200 kg。影響液壓缸推力的關鍵因素主要為:x、y和 OF值,在底盤空間和液壓缸外形允許的情況下,設置 x可變動范圍 200~800 mm,y可變動范圍 200~300 mm,OF可變動范圍200~300 mm,將模型導入Adams/view軟件[27],分別對影響液壓缸推力大小的x、y、OF值進行單因素仿真分析,受力分析如圖5所示。
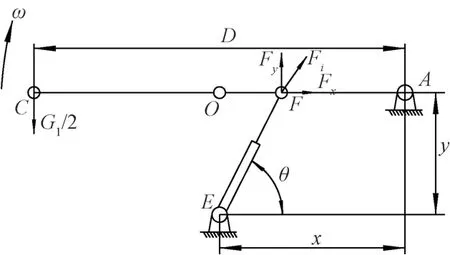
圖5 液壓缸受力分析Fig.5 Force analysis of hydraulic cylinder
剪叉提升過程中液壓缸應以省力為前提,合理布局安裝位置。如圖5中所示,x、y和OF值三因素對液壓缸推力的影響關系是:OF越小、θ角越大液壓缸越省力,θ角與x呈負相關關系與y呈正相關關系,且θ的極限角度為90°。因此仿真過程中,分別選擇影響液壓缸推力的其中一個因素進行試驗,其他2個因素設為默認值(x設為中間值500 mm、y設為最大值300 mm、OF設為最小值200 mm)。初步仿真結果圖如6a、6b、6c所示,液壓缸推力隨x和OF值增大而增大,隨y值增大而減小。然后對不同x、y和 OF值隨提升時間增長對液壓缸推力的影響進行仿真分析,設置仿真時間為3 s。由圖6d、6e、6f發現,仿真時間為0時(剪叉臨界狀態下)x值為500 mm、y值為300 mm、OF值為 200 mm時,液壓缸最大推力均在34 000~40 000 N之間,滿足了剪叉提升對于推力的需求,相對于其他參數組合條件下,液壓缸最大推力較小,推力不足,不能滿足較大的剪叉提升,液壓缸最大推力較大,而所需推力又較小,造成能耗浪費;且在該 x、y和OF值取值條件下,液壓缸推力隨時間增長幅度減小平緩、落差小,說明液壓缸運行平穩,不會產生較大的抖動,作業可靠性較高,為較理想狀態。
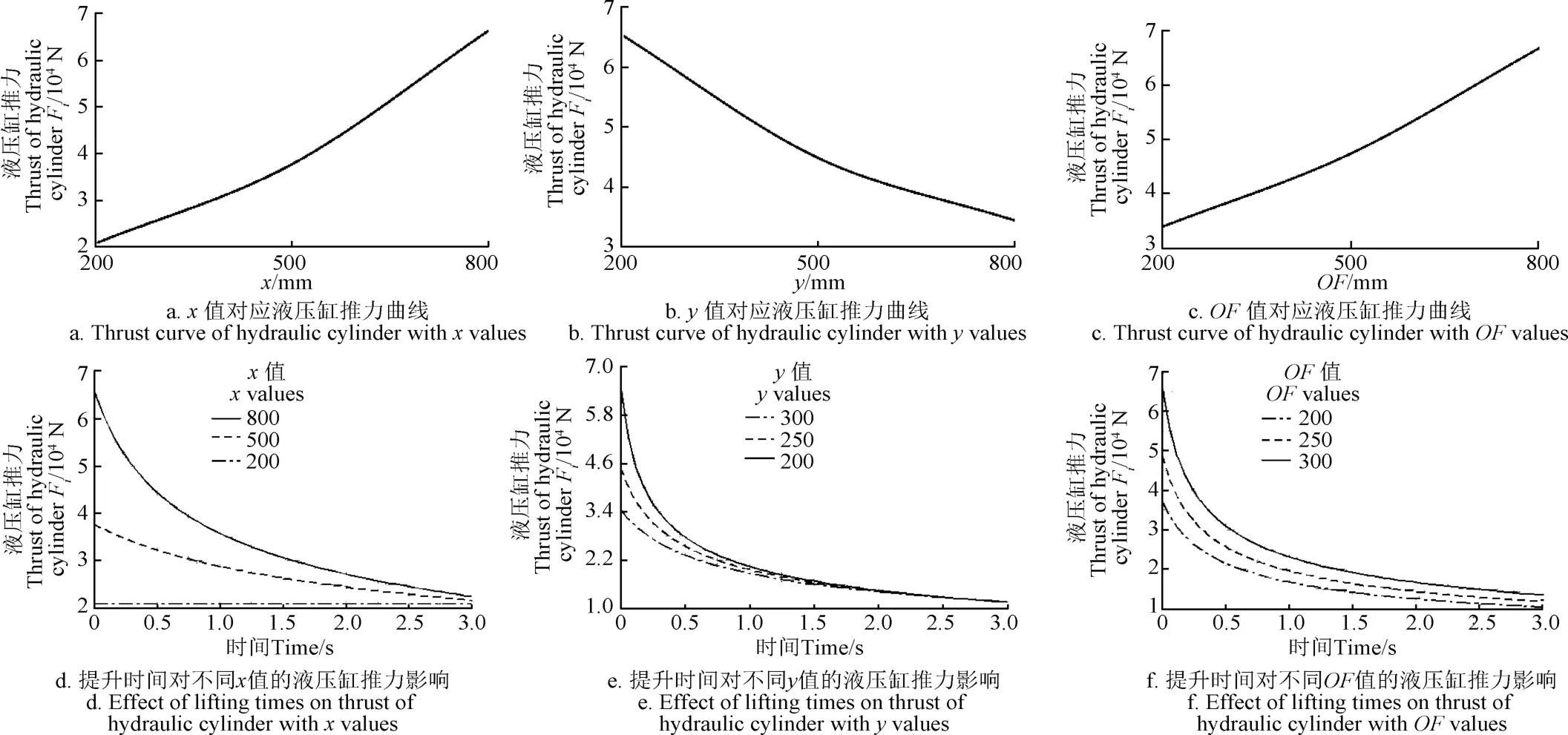
圖6 不同參數對液壓缸推力的影響Fig.6 Effect of parameters on thrust of hydraulic cylinder
取x=500 mm,y=300 mm,OF=200 mm,其他參數保持不變,以平臺質心位移U為橫坐標,液壓缸推力Fi為縱坐標,得出平臺不同提升高度對應液壓缸最大推力之間的曲線關系圖,如圖7所示。單側剪叉在載荷200 kg初始提升狀態下所需液壓缸提供最大推力為14 400 N,則雙側剪叉滿載初始提升狀態下液壓缸可提供推力Fi≥28 800 N,滿足平臺升降要求。
已知液壓缸可提供推力Fi≥28 800 N,在一定面積S液壓缸所需壓強Pi為

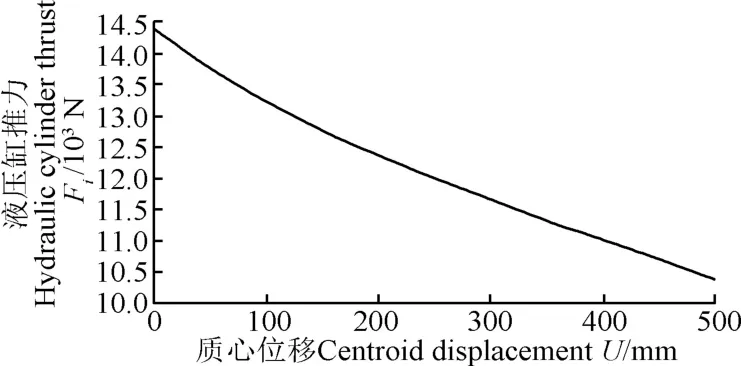
圖7 優化后作業平臺提升高度與液壓缸推力曲線關系Fig.7 Relationship between lifting height and thrust of hydraulic cylinder after optimized
液壓缸直徑取 0.05 m,由式(11)計算得:液壓缸所需壓力Pi≥14.7 MPa,考慮泵站電壓與主電路匹配,壓強滿足計算要求,因此選用壓強為 16 MPa的勝杰DC48V/2kW-01-4L-H微型液壓泵站即可滿足要求。
2.4 載人工作臺
如圖 8所示,成年人伸出雙手采摘高處果實時,手臂伸出越長,采摘高度越高,重心越往前傾,由常識可知,當人體與水平面夾角<90°時人體容易出現傾倒。因此,從安全性和作業靈活性角度考慮,則護欄高度設計應滿足

式中A1為作物生長高度,取值3 m;A2為工作臺升高后距離地面高度,取值1 m;A3為護欄高度,m;A4為臂長,根據中國成年人人體尺寸標準[28],此處取0.75 m;σ為手臂與人體形成夾角,取值30°,則計算得出A3≤1.35 m。
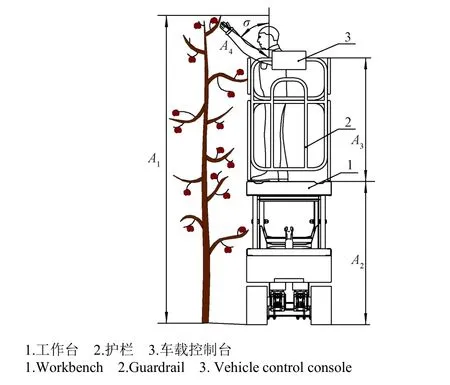
圖8 載人工作臺模擬作業Fig.8 Simulated operation for manned workbench
由于農用作業平臺暫無安全作業標準,因此參考固定式鋼梯及平臺安全要求,當平臺、通道及作業場所距基準面高度小于2 m時,防護欄高度A3應不低于0.9 m[29]。綜合考慮安全性和作業的便利性,護欄高度確定設計為1 m。
3 控制系統
3.1 系統組成與控制原理
控制系統主要由單片機、電機控制器 1/2、接觸器M1/M2、繼電器 K1/K2/K3/K4、車載控制臺、遙控器及電源轉換模塊等組成。
其控制原理如圖 9所示,本作業平臺可選擇遠程遙控和本地控制,通過2種方式均可實現平臺前進、后退、轉向和工作臺上升、下降。車載控制臺通過RS485通訊把操控信息傳送給單片機,遙控器通過NORDIC公司生產的NRF2401 2.4G無線通訊模塊把操控信息傳送給單片機無線接收器,單片機接收到信號并將信息傳送給華仲機電公司生產的ZK系列控制器,不但實現對作業平臺的升降運動和直線行走及轉向運動的控制,而且實時采集動力電壓信號回傳給車載控制臺和遙控器進行監視顯示。

圖9 電動作業平臺控制系統原理Fig.9 Control system principle of electric platform
3.2 軟件設計
控制程序基于STC15W4K32S4系列單片機采用C語言進行編程[30]。
控制過程:打開車載控制臺遙控開關,遙控器與單片機信號接收器無線連接,當撥動遙控器前進推桿,繼電器K3、K4正向吸合,控制接觸器 M1、M2將電機Y1、Y2切換到正轉,同時單片機提供1~5 V的速度模擬量信號通過電機控制器1、2控制電機Y1、Y2轉速,實現調節運行速度和行走時轉向功能;反之,繼電器K3、K4反向吸合,控制接觸器M1、M2將電機Y1、Y2切換到反轉,實現后退功能。當撥動左轉或右轉推桿時,轉彎側驅動電機斷電,另一側繼續通電,實現整車的轉彎。當按下遙控器提升按鈕,上升繼電器K1得電,單片機接收到信號后傳遞給液壓泵站上的控制器,控制器控制液壓泵站運轉,通過液壓油實現液壓缸的伸縮運動,液壓缸推動剪叉上升,從而帶動工作臺升高;當按下遙控器下降按鈕,下降繼電器K2得電,單片機接通液壓缸泄流閥,液壓缸靠工作臺自身重力復位。其中,液壓泵站電機為 48 V,控制電壓為 24 V,由48V/24 V電源轉換模塊提供;24V/12 V電源轉換模塊為單片機和車載控制臺提供電壓,同時提供液壓缸上升和下降、整機行駛和轉向4個輸出繼電器的控制電壓。其控制流程如圖10所示。
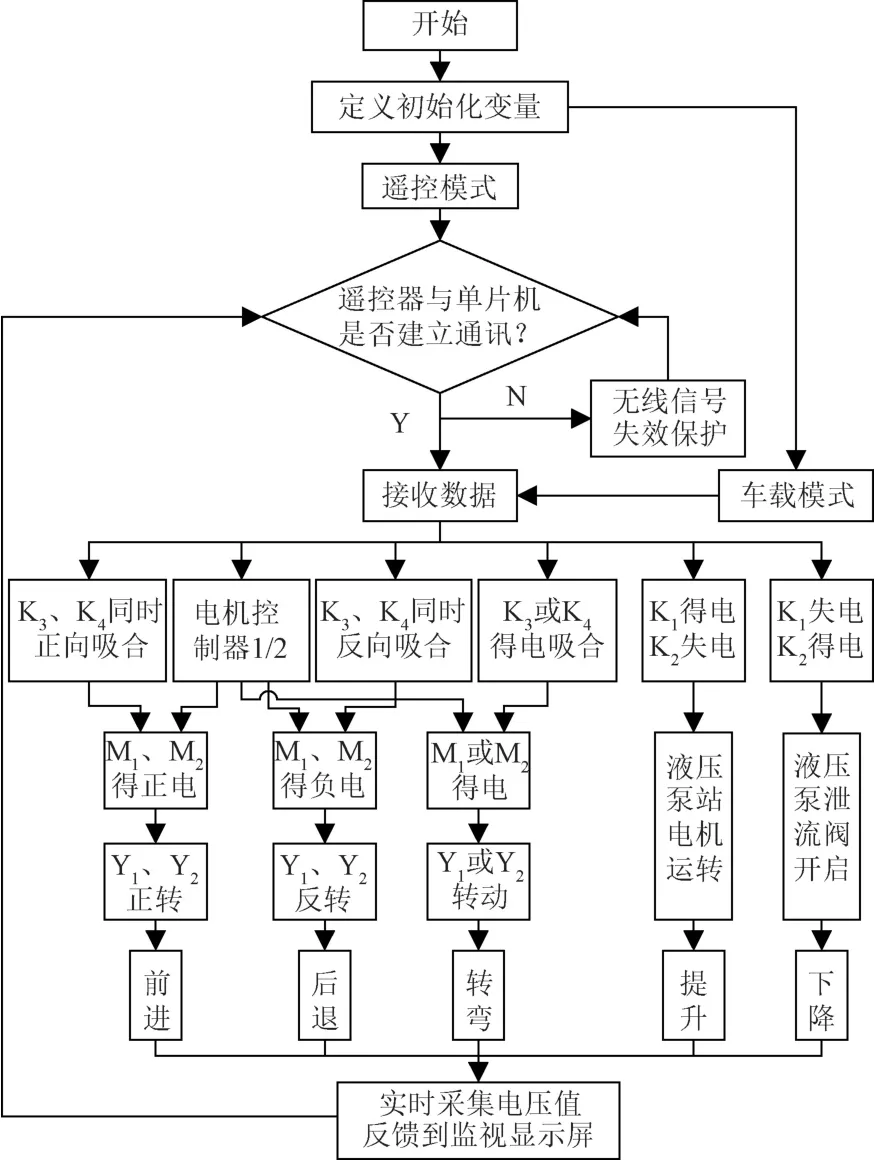
圖10 電動作業平臺控制流程Fig.10 Control flow of the electric platform
4 試驗研究
4.1 臺架試驗
4.1.1 最小轉彎半徑試驗
試驗于2018年8月在山東棗莊某公司廠區內進行。將平臺運行至水泥地面空曠處,工作臺降低至最低位置,在車體四角安裝劃線針。轉彎時操縱遙控器(或車載控制臺)轉向搖桿至最大轉向角后保持不變,以低速擋分別向左、向右各轉一圈,測量車體最外側的轉彎半徑軌跡尺寸[31]。試驗工具包括:劃線針、卷尺等。
試驗結果如表2所示,平臺在前進和后退2種操作方式下各自向左、向右轉彎半徑基本一致,試驗結果表明最小轉彎半徑平均值為 0.94 m,與設計值對比平均偏差率≤5.13%。
注:低速擋為1 km?h-1。
Note: Low speed is defined as 1 km?h-1.
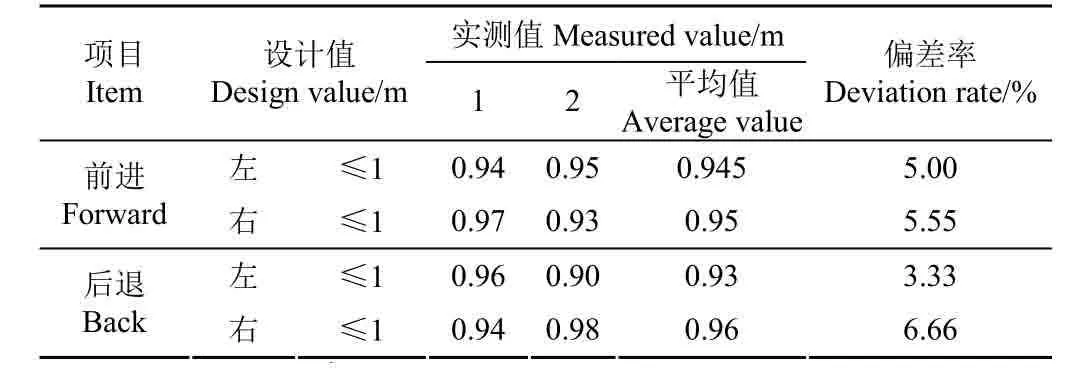
表2 電動作業平臺最小轉彎半徑試驗Table 2 Minimum turning radius test of electric platform
4.1.2 坡面行駛傾翻試驗
1)坡面行駛力學分析
電動作業平臺在坡面行駛時主要有縱向、橫向和斜向 3種狀態,考慮平臺在坡面處于低、勻速行駛狀態,空氣阻力、慣性力可忽略不計[32],物體質量施加于升降平臺中心位置,工作臺升降時整機在坡面處于靜止狀態,平臺在3種狀態條件下受力情況如圖11所示。
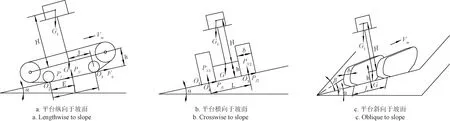
圖11 電動作業平臺在三種坡面狀態下受力簡圖Fig.11 Force diagram of electric platform under three slope conditions
① 平臺縱向于坡面
如圖11a所示,當坡面角度α逐漸增大,坡面對履帶的支撐力PN逐漸向O2點移動,當支撐點與O2重合,平臺將發生傾翻。
由力矩平衡方程

得

根據受力分析,故平臺縱向不發生傾翻的條件為E≥0。由E≥0,可求得

即平臺縱向于坡面時傾翻角范圍。
② 平臺橫向于坡面
如圖11b所示,當坡度α逐漸增大,坡面對左右履帶的支撐力PN1和PN2逐漸向O5點移動,當支撐點與O5點重合,平臺將發生傾翻。由力矩平衡方程

得
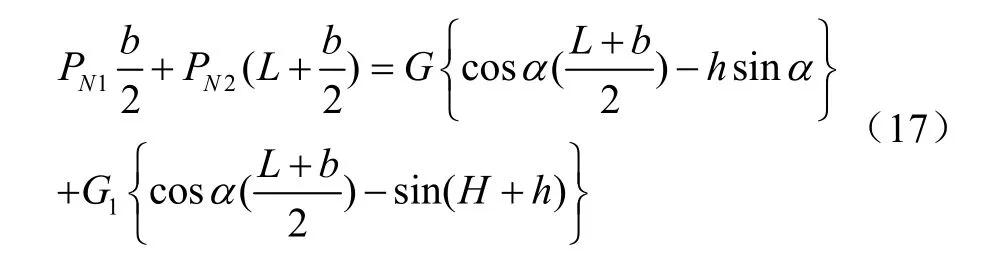
根據受力分析,故平臺橫向不發生傾翻的條件為PN1≥0,PN2≥0。
故

因此

可求得

即平臺橫向于坡面時傾翻角范圍。
③ 平臺斜向于坡面
如圖11c所示,平臺斜向于坡面是介于縱向與橫向的中間狀態,即與坡面理想轉軸呈0<β<90°關系,若坡面無限延伸,在此狀態下平臺爬坡路線近似為“Z”型,此時平臺與水平面構成新夾角γ,γ<α。即平臺外在條件相同的 3種狀態下,縱向和橫向時不會傾翻,斜向亦不會傾翻。平臺處于γ坡度的受力分析與上述①、②同理。
通過以上 3種狀態的受力分析得出:當爬坡角度一致,平臺不同狀態下坡面行駛穩定性與平臺自重 G、載質量G1、履帶與地面接觸長度l、主動輪側支重輪中心與平臺重心位置的垂直距離J、舉升高度H、平臺重心高度h、左右履帶中心距L、履帶寬度b等因素有關系。
2)試驗方法與結果
受試驗條件限制,坡面行駛穩定性試驗測量平臺理想靜止狀態下的最大傾翻角。將平臺放至坡面分別呈縱向、橫向、斜向 3種狀態,用拖拉機前配重鑄鐵塊模擬載重置于工作臺重心位置,設置0、100、150、200 kg 4種載量,工作臺提升高度分別0、250、500 mm。測試平臺在坡面不同行駛狀態下,升降高度、載重對其傾翻或滑坡穩定性的最大影響角度。受試驗條件限制,試驗坡面采用表面帶有“人”字形防滑紋的鋼板代替,借助吊機吊住鋼板一側,另一側與地面鉸接,通過升降吊機高度變換坡面角度,試驗過程如圖 12所示。試驗工具包括:角度測量儀、吊機、“人”字形防滑紋的鋼板、配重鐵塊等。

圖12 坡面行駛傾翻試驗Fig.12 Tip over test of platform driving on slope
試驗結果如表 3所示,結果表明:平臺在坡面行駛最大傾翻角與平臺重心有關,而重心與車體狀態、工作臺升降高度、負載質量及高度有密切關系。平臺坡面行駛最大傾翻角隨工作臺升高、負載加重(負載高度逐漸加高)而逐漸減小;在工作臺升降高度、負載質量及高度相同情況下,最大傾翻角與平臺和坡面的位置狀態相關,縱向狀態最大傾翻角數值最高,橫向狀態數值最小,即平臺在坡地作業時宜縱向于坡面,減少橫向作業。
4.1.3 爬坡性能試驗
爬坡角度是表征平臺在田間復雜地形通過能力的主要指標之一,也是考核平臺運行可靠性的關鍵因素。根據 4.1.2坡面行駛傾翻試驗中測得平臺最大傾翻角為30.5°,在保證平臺穩定的狀態下設置試驗坡面角度分別為10°、20°、30°,將200 kg負載置于工作臺中心,平臺縱向于坡面,以低速擋通過 3個不同角度的坡面,記錄行駛時間和爬坡時電流變化值,測試平臺爬坡角度與爬坡速度之間的關系和爬坡角度對電流的影響。試驗工具包括:臺灣儀辰多功能磁性角度測量儀、勝利牌VC890C+全自動萬用表、配重鐵塊等。
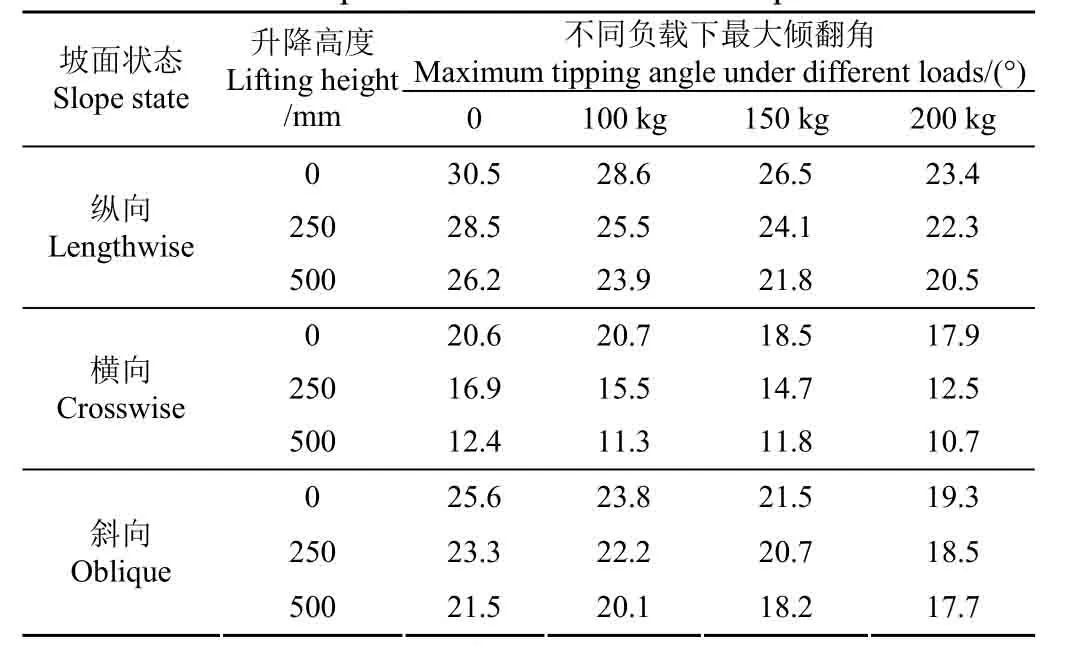
表3 電動作業平臺傾翻試驗結果Table 3 Tip over test results of electric platform
試驗結果如表 4所示,相同測試距離內,隨著坡度不斷增大,平臺通過時間變長,爬坡速度逐漸變慢,整機電流平均值逐漸增大,但均在允許額定電流范圍內。試驗過程中,平臺運行正常,能正常通過 3種坡度的坡面,但通過30°坡面時平臺有些許顫動,出現輕微打滑現象,使得通過時間變長,爬坡速度變慢。
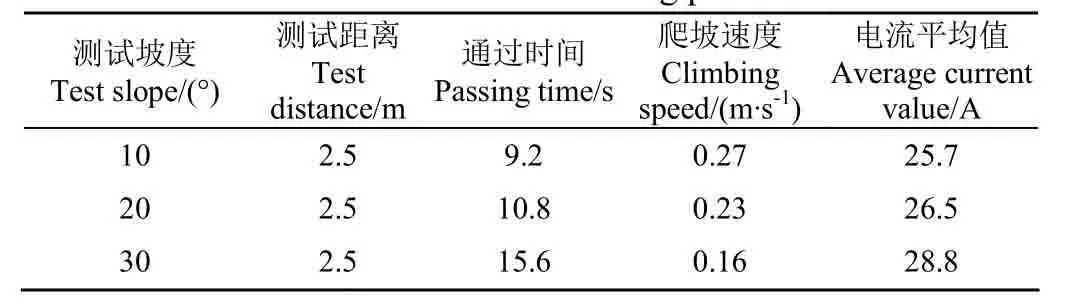
表4 爬坡性能試驗結果Table 4 Test result of climbing performance
4.1.4 續航時間試驗
試驗于2018年8月在山東棗莊某公司拖拉機磨合試驗臺上進行,試驗對象為滿電狀態下的電動作業平臺。前進反方向用鐵鎖鏈將平臺與地面固定連接,將 200 kg負載置于工作臺中心位置,平臺調至高速檔(2 km/h),保持最大行駛速度,電量每下降 20%記錄對應車速變化值與續航時間,當顯示電量剩余 10%(考慮保護電池不受損壞,電量剩余 10%,由電流表測量計算得出)時試驗停止,記錄續航總時間。試驗工具包括:秒表、電流表、轉速表、配重鐵塊等。
試驗結果如圖13所示,試驗過程中平臺運行平穩,電池與電機均無過熱現象,電池電量下降均勻,最高行駛速度達2 km/h。當電量在60%以上時可一直保持最高速度行駛;當剩余電量低于 60%時,最高行駛速度隨電量的減少開始逐漸下降;當剩余電量為 40%時,整機續航時間為3.5 h;當電量不足40%時,電池組電量衰退較快;當剩余電量為10%時,行駛速度為0.5 km/h、總續航時間為3.9 h,由此推斷電量耗盡時,總續航時間足以達到4 h。
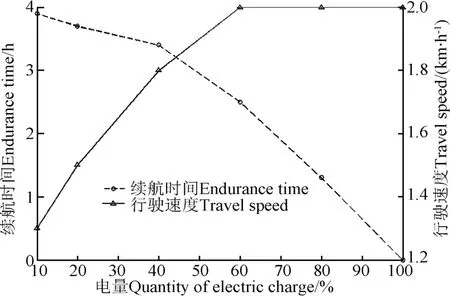
圖13 電動作業平臺續航時間試驗結果Fig.13 Endurance time test result of electronic platform
4.2 田間驗證試驗
對平臺進行田間驗證試驗,主要考核田間坡面行駛穩定性能、地頭轉彎性能、平地運輸性能以及工作臺升降性能等。試驗于2018年9月在常熟某蔬菜合作社溫室大棚內進行,試驗前作業平臺和遙控器均為滿電狀態,田間試驗情況如圖14所示。
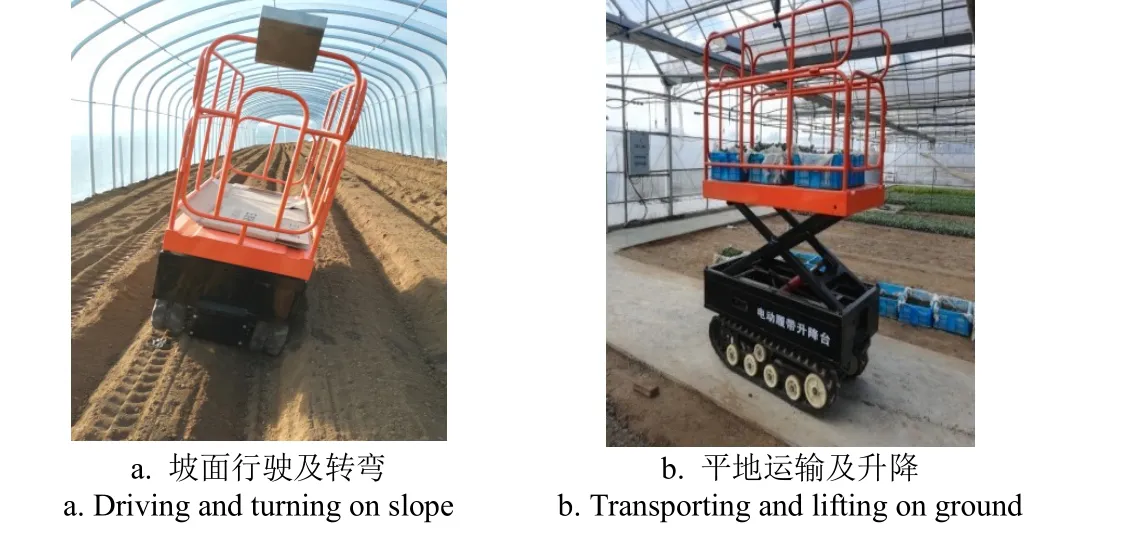
圖14 田間驗證試驗Fig.14 Validation test in field
試驗結果如表 5所示,該作業平臺田間行駛順暢,田間坡面行駛性能良好,最高行駛速度達2 km/h;地頭轉彎靈活,最小轉彎半徑為 0.94 m;平穩狀態下工作臺舉升質量可達400 kg,升降高度達0.5 m。經與設計要求對比可知,整機功能基本實現,關鍵部件達到了主要設計參數要求,作業性能基本符合預期,滿足溫室內果蔬采運作業的農藝要求。
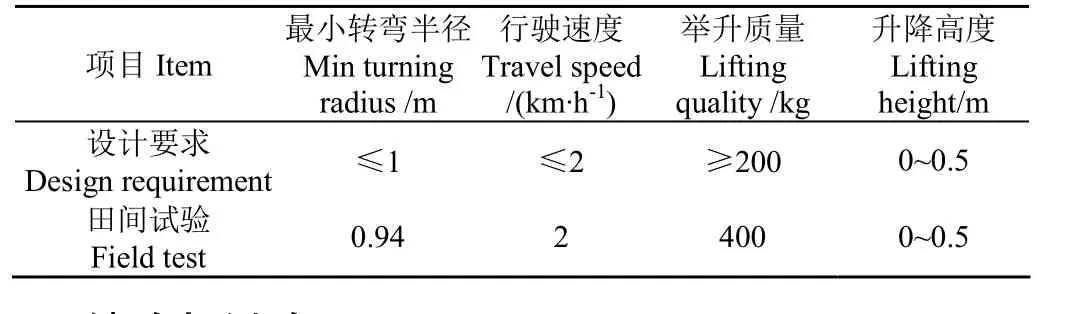
表5 試驗對比結果Table 5 Comparison of test results
5 結論與討論
1)針對溫室高架吊蔓果蔬的采收運送難、葉面施藥與剪枝不便等問題,從節能環保、結構輕便、小型化入手,以電能為動力源,設計了一種主要由工作臺、升降裝置、底盤、電池組及控制系統等組成溫室用電動作業平臺,具有行走、轉彎、升降及掛接運輸等功能;開發了具有雙工作模式的控制系統,可實現對作業平臺的遠程和在線操作,整機結構簡單,操作方便。
2)通過臺架性能試驗研究,可知整機最小轉彎半徑為0.94 m,坡面行駛最大傾翻角分別為縱向30.5°、橫向20.6°、斜向25.6°,最高行駛速度2 km/h,200 kg負載下作業續航時間可達4 h。田間驗證試驗結果表明整機作業性能良好,考核指標均滿足設計要求,與預期相符。
3)平臺在坡面行駛,最大傾翻角隨工作臺升高、負載加重(即高度也增加)而逐漸減小;同時與平臺和坡面的位置狀態相關,縱向狀態作業安全系數最高,優于斜向和橫向。
試驗中平臺雖可通過30°坡面,但當工作臺傾斜超過15°作業人員就難以保證站立平衡性,所以后期需考慮增設自調平機構進行優化改進,并開展相關試驗,提高作業平臺的可靠性、穩定性及適應性。
由于掛接拖車是該作業平臺的選配件非必配件,因此平臺試驗均在不掛接拖車的常規狀態下進行,若實際生產需要掛接拖車以增加裝載容量,則需對掛接拖車后作業平臺整體的轉彎半徑、坡面行駛傾翻角度、爬坡性能及續航時間等進行下一步更加深入研究。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
