基于PMAC的數碼迷彩噴涂機器人運動控制方法
2019-06-24 12:28:32張延超張永濤盧紅旗王慧武
制造業自動化 2019年2期
張延超,張永濤,盧紅旗,王慧武,高 揚
(1.西安理工大學 機械與精密儀器工程學院,西安 710048;2.長安大學 汽車學院,西安 710064)
0 引言
地面建筑或物體的偽裝已經成為應對高空偵察的主要技術手段,有效的偽裝手段可以保證軍事目標的安全性[1~4]。數碼迷彩作為一種新式的利用“像素”原理的偽裝手段,相比于傳統迷彩隱蔽性更強,在應對高空偵察方面具有較大優勢。但目前市場上缺少對數碼迷彩等多色圖案進行快速精確噴涂的產品,國內軍事偽裝技術中主要依靠人工進行數碼迷彩噴涂,人工噴涂不但效率較低,極易出錯,而且難以保證噴涂邊界的精度,直接影響到軍事偽裝進度和偽裝效果[5,6]。現有噴涂機器人多以單色噴涂為主。初苗等[7]基于PLC控制的兩槍式直角坐標機器人樣機提出一種數碼迷彩機器人快速控制算法,并進行試驗驗證可以完成雙色噴涂,其中指出噴涂作業中存在系統響應時間。同時數碼迷彩主色通常由3~5種顏色組成[8],因此對于偽裝效率和效果而言,有必要開展多把噴槍噴涂機器人和考慮系統響應時間等方面的研究。
本文以PMAC運動控制器和上位機為控制平臺設計了一種新型數碼迷彩噴涂機器人,可以同時搭載四把噴槍,一方面避免了單噴槍換色噴涂面臨的管路顏色殘留、混色、清洗、對漆料要求較高等問題;另一方面,采用四把噴槍基本可以一次性完成數碼迷彩噴涂作業。控制算法方面,考慮系統響應時間的因素,提出了一種噴涂機器人的快速控制算法,在減少控制單元計算量的基礎上可以避免不同色塊間流白或重疊現象,提高了噴涂效率以及精度。為數碼迷彩軍事偽裝技術的理論研究和工程實施提供重要參考。
1 噴涂機器人工作原理
數碼迷彩利用“像素”的原理,其通常可以分解為規整的方形小色塊,可以采用直角坐標機器人的結構形式。但考慮到適應不同列寬噴涂要求,要使噴槍與噴涂作業面的距離可調,噴涂機器人采用了三軸機器人的結構形式。如圖1所示為噴涂機器人設計方案,通過調節噴涂機構為水平、豎直狀態,該噴涂機器人可以完成對水平噴涂工作面、豎直噴涂工作面的噴涂作業。

圖1 噴涂機器人機械結構示意圖
噴涂機器人主要包括行進機構、噴涂機構、控制柜和多噴槍模塊。其中,行進機構主要搭載噴涂機器人噴涂機構、控制柜和多噴槍模塊,并通過移動完成不同范圍的噴涂作業;噴涂機構主要通過電機帶動多噴槍模塊沿直線導軌運動;控制柜通過控制伺服驅動器和電磁閥完成對多噴槍模塊運動和狀態的控制;縱向安裝的多噴槍噴涂模塊搭載四把噴槍實現多色的噴涂。
2 噴涂機器人運動控制方法
如圖2所示為噴涂機器人坐標系示意圖,其中X-Y平面與噴涂作業面平行,噴槍沿Y軸依次等距安裝。多噴槍模塊沿X軸和Z軸只有運動狀態無噴槍開關狀態,沿Y軸同時存在運動狀態和噴槍開關狀態。首先,根據噴涂列寬多噴槍模塊沿Z軸移動。噴涂開始時,多噴槍模塊沿Y軸運動完成單列噴涂后,再沿X軸移動進行下列噴涂,即多噴槍模塊在X-Y平面以S型軌跡完成單次噴涂作業。

圖2 噴涂機器人坐標系
如圖3所示,圖3(a)為噴槍在X-Z平面噴出的射流以噴槍噴嘴為頂點,噴涂作業面為底,其呈等腰三角形狀;圖3(b)為噴槍在噴涂作業面噴出的射流截面,其可以近似為矩形[7]。令等腰三角底邊長度為de,高為h,矩形高度為w,其中矩形寬度等于等腰三角底邊長度。

圖3 噴槍射流截面示意圖
假設噴涂作業單列色塊寬度為dw,則為適應噴涂列寬多噴槍模塊沿Y軸移動的距離LZ為:

多噴槍模塊沿Z軸移動距離Lz后,噴槍在噴涂作業面的射流截面寬度等于噴涂列寬。
多噴槍模塊沿Y軸同時存在運動狀態和噴槍開關狀態。為實現快速控制,定義任一噴槍沿Y軸運動可能發生開關狀態變化的位置點為潛在顏色變化點[7]。如圖4所示為多噴槍模塊噴涂示例。其中,四把噴槍等距安裝,安裝間距為dp;方形色塊的長度為dc,寬度為dw;記初始時1號噴槍的Y坐標為y0=0,1號噴槍進入噴涂區域第一個色塊時的Y坐標為y1,即1號噴槍有距離為y1的空行程。易知潛在顏色變化點的位置為任一噴槍在噴涂區域任一色Y方向邊界時的位置。
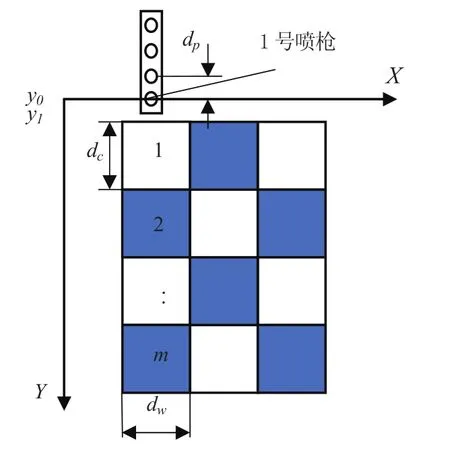
圖4 多噴槍模塊噴涂示例
以圖第一列為例,任一噴槍只有運動到色塊邊界位置時,才可能發生開關狀態變化。為方便判斷,以1號噴槍的Y坐標為基準,則任一噴槍進入噴涂區域任一色塊時1號噴槍的Y坐標分別為:

其中,y1為單列噴涂開始前多噴槍模塊的空行程,i為噴槍編號(i=1,2,…,n),j為沿Y軸正方向的方形色塊依次編號(j=1,2,…,m,m+1),1號噴槍的Y坐標即為潛在顏色變化點的Y坐標。
當i=n且j=m+1時,即第n把噴槍離開噴涂區域第m個色塊時,為單列噴涂作業完成,則多噴槍模塊沿Y軸的行程Sy為:

其中,Ey為噴涂機器人沿Y軸的有效噴涂距離,y1為單列噴涂開始前多噴槍模塊的空行程,y2為單列噴涂結束后多噴槍模塊的空行程。
如上所述,僅需給出任一噴槍進入噴涂區域任一色塊時1號噴槍的Y坐標對應的每把噴槍的開關狀態即可實現對多噴槍模塊的快速控制。但實際噴涂過程中會存在系統響應時間,造成不同色塊之間流白或重疊現象,因此需要作出一定的位置補償以保證噴涂效果。假設多噴槍模塊的穩定運動速度為v,系統響應時間為t,則考慮系統響應時間后任一噴槍在噴涂區域任一色塊Y方向邊界時1號噴槍的Y坐標為:

完成第一列噴涂后,第二列從第m個色塊開始噴涂,以此類推。多噴槍模塊沿X軸移動的距離LX為:

其中,dw為單列噴涂列寬。
多噴槍模塊在X軸方向不需要空行程,則多噴槍模塊沿X軸的行程SX為:

其中,Ex為噴涂機器人沿X軸的有效噴涂距離,k為噴涂機器人單次最大噴涂列數。
3 噴涂機器人的控制系統
噴涂機器人主要實現對平面進行數碼迷彩快速噴涂,其控制系統的主要功能有兩個:其一,通過伺服驅動器控制伺服電機的運動狀態,實現對多噴槍模塊運動的控制;其二,通過不同電磁閥的開啟和閉合控制壓縮氣體的通斷,實現對每把高壓無氣自動噴槍的差別控制。噴涂機器人控制系統的總體構架如圖5所示。該控制系統主要由工控機、可編程多軸運動控制器(PMAC)和相應執行器組成。距離位置通過數據采集卡反饋噴槍和待噴涂作業面之間的距離,距離測定通過安裝在直角坐標噴涂機器人上的兩個高速攝像頭實現,電磁閥和噴槍一一對應,通過PMAC提供的I/O接口控制電磁閥開啟和關閉。
如圖6所示為噴槍開關狀態控制原理圖,高壓無氣噴涂機實時為無氣噴槍供漆,同時空氣壓縮機通過電磁閥與高壓無氣自動噴槍連接,若電磁閥通電閥門打開,壓縮空氣通過電磁閥進入噴槍,控制噴槍開啟;反之,電磁閥斷氣后,噴槍關閉。噴涂過程由噴涂機器人中的噴涂子系統控制,其中噴涂子系統結構如圖7所示。在噴涂模塊中安裝有多把噴槍,每把負責一種顏色的噴涂,噴涂過程中由PMAC通過控制運動卡來控制電機來讓噴涂模塊沿平行坐標軸運動,同時通過電磁閥控制噴槍的開關。
噴涂過程中是分區域作業的,即每次移動噴涂模塊后完成一個1500mm×1200mm作業面的噴涂,然后關閉系統移動噴涂平臺進入下一個噴涂區域進行噴涂,現以一個噴涂區域為例,噴涂機器人的工作流程如圖8所示。首先由上位機識別當前噴涂區域并判斷噴涂機器人噴槍是否處于初始狀態,并通過視覺判別系統完成噴槍初始定位,并根據當前噴涂位置識別和完成初始程序生成,而后開啟噴涂系統,按照預定軌跡自動控制X、Y軸驅動電機移動噴槍,同時根據程序由電磁閥適時判別開啟相應顏色的噴槍完成當前作業區域的噴涂任務。

圖5 噴涂機器人控制系統

圖6 噴槍開關狀態控制原理

圖7 噴涂子系統工作原理
4 試驗結果
為驗證本文提出的運動控制算法和控制系統的有效性,根據圖1噴涂機器人設計方案和圖7噴涂機器人控制系統,搭建的噴涂機器人物理樣機如圖9所示。該噴涂機器人物理樣機主體框架以鋁合金為主,相比傳統鋼材大幅降低設備質量,符合輕量化要求。四把噴槍沿Y軸方向等距安裝,安裝距離dp=60mm。多噴槍模塊的穩定運動速度為0.4m/s,其單次最大有效噴涂面積為1500mm×1200mm,取單列噴涂前后的空行程y1=y2=20mm,則根據式(3)和式(6)噴涂機器人多噴槍模塊沿X、Y軸方向的行程分別為1500mm、1220mm。

圖8 噴涂機器人的工作流程

圖9 噴涂機器人物理樣機
如圖10所示,為色塊邊長dc=dp=100mm時的6行4列局部多色噴涂的試驗效果,該圖案為存在多個連續色塊同一顏色的不規則圖案,可以較好驗證本文設計和研制的物理樣機的噴涂效果。實驗中,上位機根據式(4)預先計算出所有潛在顏色變化點,僅需四次單列運動實現了圖示噴涂效果。說明:限制于實驗場地,試驗在橡皮紙面上進行,由于表面較為光滑,且油漆吸附能力較差,若在的水泥粗糙表面進行噴涂,效果會有進一步的提高。
如圖11所示是四色多色噴涂一個完成作業區域內的數碼迷彩噴涂試驗結果。通過調節的油漆粘度值、噴槍開啟延遲與提前關閉時間、噴槍移動速度,獲得了理想的10cm×10cm數碼迷彩噴涂效果,在單次作業區域內相鄰馬賽克方塊圖案之間的對接誤差≤5mm,完全達到了預期噴涂效果,完成單次作業區域的噴涂時間僅為54s,效率得到大大提高,較好的驗證了基于PMAC運動控制器的數碼迷彩噴涂效果。

圖10 多色噴涂實驗效果圖

圖11 單次作業區域內數碼迷彩噴涂效果
5 結束語
本文提出了一種基于潛在顏色變化點并且考慮系統響應時間的快速噴涂控制算法,僅需在有限個潛在顏色變化點進行控制,即可完成多色噴涂作業,提高工作效率。并設計了以PMAC和工控機為控制平臺的噴涂機器人控制系統。通過樣機研制和多色噴涂實驗表明,利用本文設計研制的噴涂機器人對任一單列四色圖案,噴涂機器人僅需一次噴涂運動即可完成噴涂作業。數碼迷彩主色通常由3~5種顏色組成,即本文設計研制的噴涂機器可以單次完成絕大部分數碼迷彩平面噴涂作業。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
