衛星載荷隔振裝置特性的微振動試驗及分析*
2019-06-24 10:26:06檀傈錳殷新喆
振動、測試與診斷 2019年3期
羅 婕, 檀傈錳, 羅 敏, 殷新喆
(北京空間飛行器總體設計部 北京,100094)
引 言
隨著我國航天技術的高速發展,以高分辨率遙感衛星為代表的高精度航天器在軍事偵察、測繪、導航、氣象及海洋等領域獲得廣泛應用。隨著航天器有效載荷觀測精度的提升,微振動對有效載荷穩定度的干擾成為影響高分衛星指向精度和成像質量的主要因素之一[1]。為了解決微振動對有效載荷穩定度的干擾問題,國家針對高精度航天器在軌微振動抑制的迫切需求,開展了三項課題研究:“微振動源擾振機理及輸出特性”課題主要研究微振動產生的機理,揭示微振動源擾振輸出特性;“微振動傳遞規律及測量方法”課題主要研究微振動傳遞規律,揭示多源微振動在航天器平臺復雜環境下傳遞的規律及耦合的特性,提出微振動間接測量的理論與方法;“微振動抑制理論及驗證方法”課題主要研究微振動綜合抑制的理論與機制,提出多級、多維系統抑制及綜合驗證的理論與方法[2-7]。
作為微振動抑制理論及驗證方法研究中多級、多維系統抑制的重要組成部分,在有效載荷安裝位置通過載荷隔振裝置隔離從衛星平臺傳入有效載荷的微振動干擾,是降低微振動對有效載荷干擾的重要手段。然而由于空間敏感,有效載荷不可避免地會受到多個方向的擾動,因此載荷隔振裝置一般具有隔離多維振動的能力,并且其在軌工作狀態具有零重力、自由邊界等特殊力學環境。如何合理地模擬載荷隔振裝置在軌工作環境,并對這種裝置的微振動隔振性能進行全面科學的地面測試,成為項目遇到的難點之一[8-10]。
筆者為了對載荷隔振裝置的特性進行研究,設計和搭建了一套微振動試驗系統,并設計了合理可行的試驗方案,能夠量化評估載荷隔振裝置的減隔振效果。該試驗研究為載荷隔振裝置的性能評估提供了重要的基礎數據,試驗方法可推廣到其他衛星隔振系統,為后續其他減隔振裝置的地面驗證試驗提供了工程經驗,對衛星減隔振系統設計具有廣泛的參考價值。
1 載荷隔振裝置簡介
圖 1所示為某光學成像衛星的載荷隔振裝置組成圖,該裝置由減振模塊、壓緊釋放裝置和相機安裝框三部分組成。其中,相機安裝框用于提供光學載荷安裝接口,壓緊釋放裝置在發射時鎖定,從而提高相機和衛星主結構的連接剛度,保證相機在發射時的承載要求,此時減振模塊不起作用。入軌后,壓緊釋放裝置接受解鎖指令并完成解鎖,解鎖后斷開相機安裝框和結構安裝框的連接關系,相機只通過減振模塊與衛星相連接,并通過減振模塊實現微振動抑制功能。

圖1 載荷隔振裝置組成圖Fig.1 Composition diagram of payload isolation device
2 載荷隔振裝置微振動試驗系統設計
2.1 自由邊界模擬方法
為了合理模擬衛星在零重力下的狀態,并考慮到方法的有效性及可實施性,采用支撐式工裝來模擬自由邊界條件,如圖 2所示。試驗時,整星處于豎直狀態,由相機模擬件、模樣結構星和載荷隔振裝置三部分組裝而成,并安裝在自由邊界模擬支撐工裝上。該支撐工裝底部與地軌固支,頂部與衛星對接,支撐衛星抵消重力,從而模擬衛星實際在軌飛行狀態下的自由邊界條件,降低附加剛度對試驗的影響。試驗件上方整星吊點處利用軟繩與整星吊具相連,以保證整星安全。軟繩主要是起到保護衛星的作用,防止其傾倒,在衛星處于豎直狀態時,軟繩對衛星不產生作用力,因此不會對測試結果產生影響。
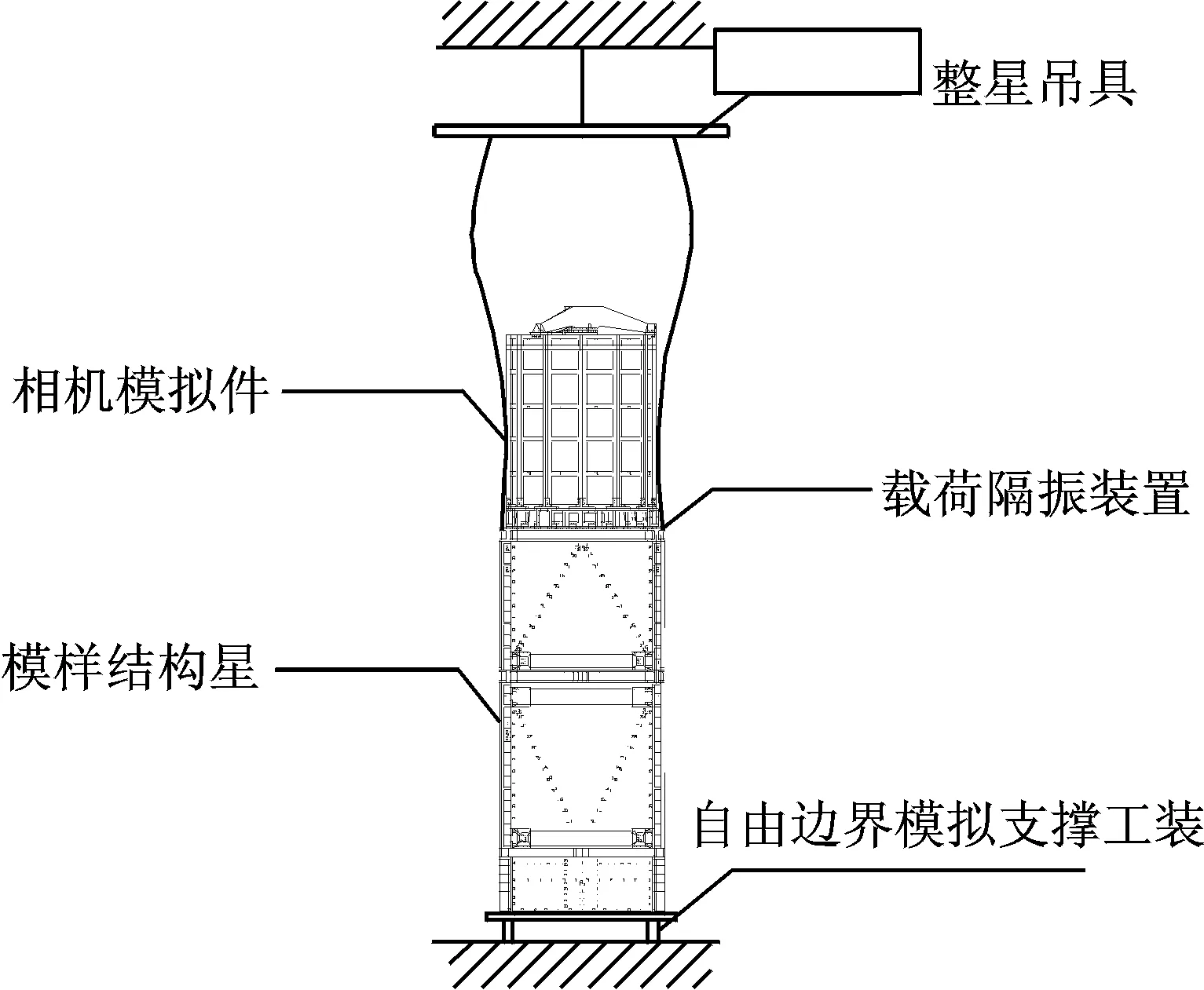
圖2 整星安裝示意圖Fig.2 Sketch map of whole satellite installation
2.2 試驗測試方案
根據載荷隔振裝置的功能和特點,通過整星微振動試驗,主要對載荷隔振裝置安裝后的整星模態和傳遞率進行測試。為了對整星在不同安裝狀態下的模態特性和傳遞特性進行對比分析,并量化評估載荷隔振裝置的減隔振效果,需要在壓緊釋放裝置解鎖和鎖定這兩種狀態下進行測試。測試方法如下。
1) 模態測試:通過錘擊法進行模態測試,從而獲得相機+載荷隔振裝置組合體的模態頻率和振型。錘擊點位置為相機框上粘貼的4個加速度測點附近,每點錘擊x,y,z三個正交方向。
2) 傳遞率測試:傳遞率測試采用大行程激振器+力傳感器的方式,分別在星體的4個立柱外側對星體進行激振,如圖 3所示。在每個激振點進行激振時,激勵工況如表 1所示,其中包含有不同幅值和不同頻率的定頻正弦信號,通過數據分析可得到星體-載荷隔振裝置-相機的微振動傳遞特性。其中,定頻正弦信號的頻率值根據相機成像敏感干擾頻率或者衛星實際振源干擾頻率來決定。

圖3 激振點位置圖Fig.3 Diagram of excitation point position
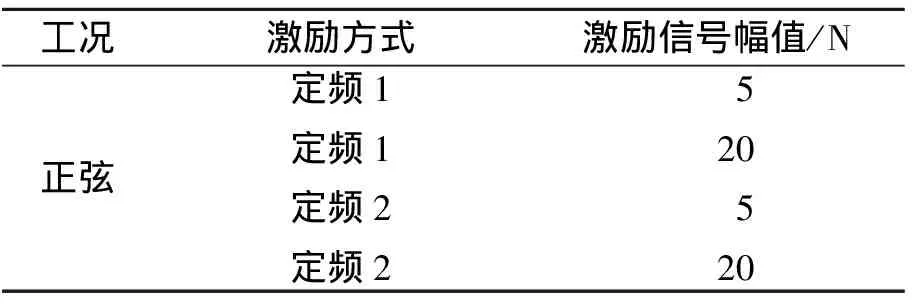
/N1122520520
2.3 測點布置
在試驗中設置4個力測點和8個加速度測點,其具體位置描述見表 2。
由于力測點和加速度測點所用的傳感器質量每個大約在5g左右,該質量和整星的質量相比可以忽略不計,對測試結果基本不產生影響,因此在理論分析以及試驗測試中可以不考慮傳感器附加質量的影響。
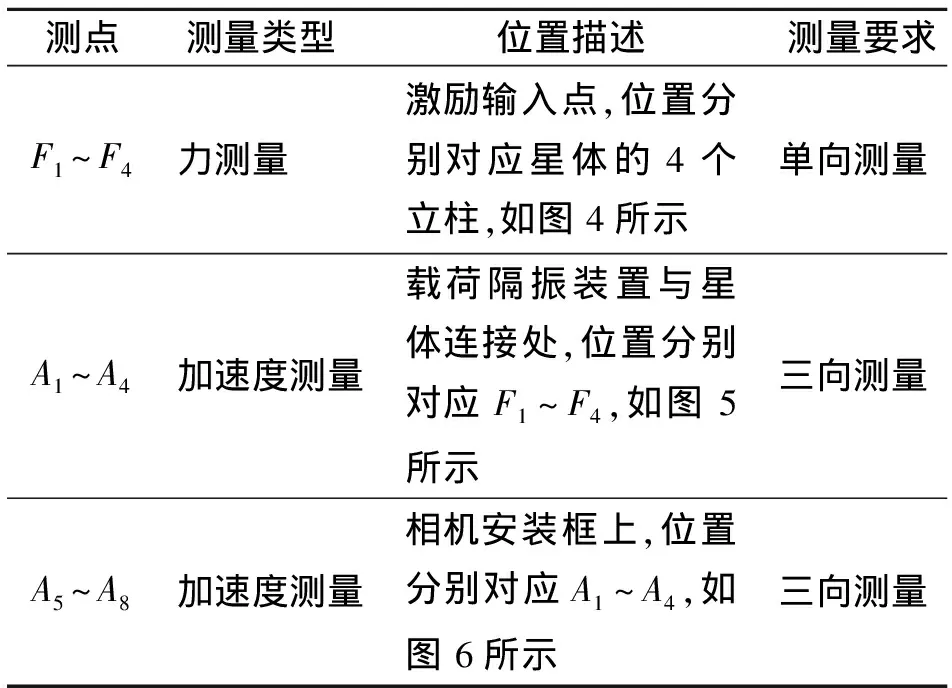
表2 試驗測點說明

圖4 力測點安裝位置(星體上)Fig.4 Diagram of force measuring point installation position (on the satellite)

圖5 載荷隔振裝置與星體連接位置處的加速度測點Fig.5 Acceleration measuring point at the position where payload isolator device is connected to the satellite

圖6 相機安裝框上的加速度測點Fig.6 Acceleration measuring point on the camera installation frame
3 試驗結果及分析
3.1 模態測試結果及分析
圖7所示為利用有限元分析法對相機+載荷隔振裝置組合體進行了理論建模,并通過分析得到組合體在壓緊釋放裝置鎖定狀態(發射階段)和解鎖狀態(入軌階段)下的x向和y向1階模態頻率,如表3所示。

圖7 相機+載荷隔振裝置組合體模態的有限元分析Fig.7 Finite element analysis of camera and payload isolation device combination mode

表3 理論分析得到的組合體1階模態頻率
在實際試驗中,同樣分別在壓緊釋放裝置鎖定狀態和解鎖狀態下進行了模態測試,得到相機+載荷隔振裝置組合體在兩種狀態下的1階模態頻率,測試結果如表4所示。

表4 試驗得到的組合體1階模態頻率
對比表 3和表 4的數據可以看到,無論是鎖定狀態還是解鎖狀態,試驗得到的1階模態頻率值和理論分析值吻合的很好,證明了試驗方案的合理性和有效性。圖 8給出了組合體在解鎖和鎖定兩種狀態下的x向1階模態振型,結合表 4的試驗結果,可以充分說明壓緊釋放裝置在鎖定狀態下,相較于解鎖狀態而言,組合體的模態頻率和振型都發生了一定的變化,且鎖定后的1階頻率增大,說明此時組合體剛度增大,有利于減小發射段的相機響應,從而達到增大承載能力的目的。
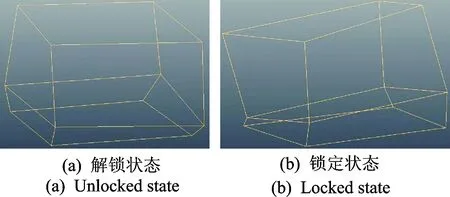
圖8 解鎖狀態和鎖定狀態下的x向1階模態振型示例Fig.8 First-order mode shape illustrations of x direction under unlocked state and locked state
3.2 傳遞率測試結果及分析
3.2.1 傳遞特性分析
圖 9~12所示為在解鎖狀態和鎖定狀態下,進行定頻1正弦激勵時得到的A1和A5測點、A2和A6測點、A3和A7測點、A4和A8測點的加速度頻譜圖,其中測點A5~A8分別對應測點A1~A4經過載荷隔振裝置之后得到的傳遞信號,且圖中的縱坐標均為對數坐標。
由圖 9~12可以看到,在解鎖狀態下,經過載荷隔振裝置后,定頻1的頻率峰值明顯降低,且降低幅度基本一致,充分說明經過載荷隔振裝置后,微振動傳遞信號幅度得到了有效抑制,隔振效果良好;而在鎖定狀態下,由于載荷隔振裝置并未起作用,因此定頻1的頻率峰值降低幅度很小。圖 13所示為兩種狀態下的A1和A5測點時域信號圖,從圖中也可以看出以上規律。這說明對于定頻1,載荷隔振裝置具有良好的隔振作用,通過試驗其隔振效果是能夠量化評估的。通過對定頻2正弦激勵下得到的信號進行同樣的分析,也能得到類似的規律。
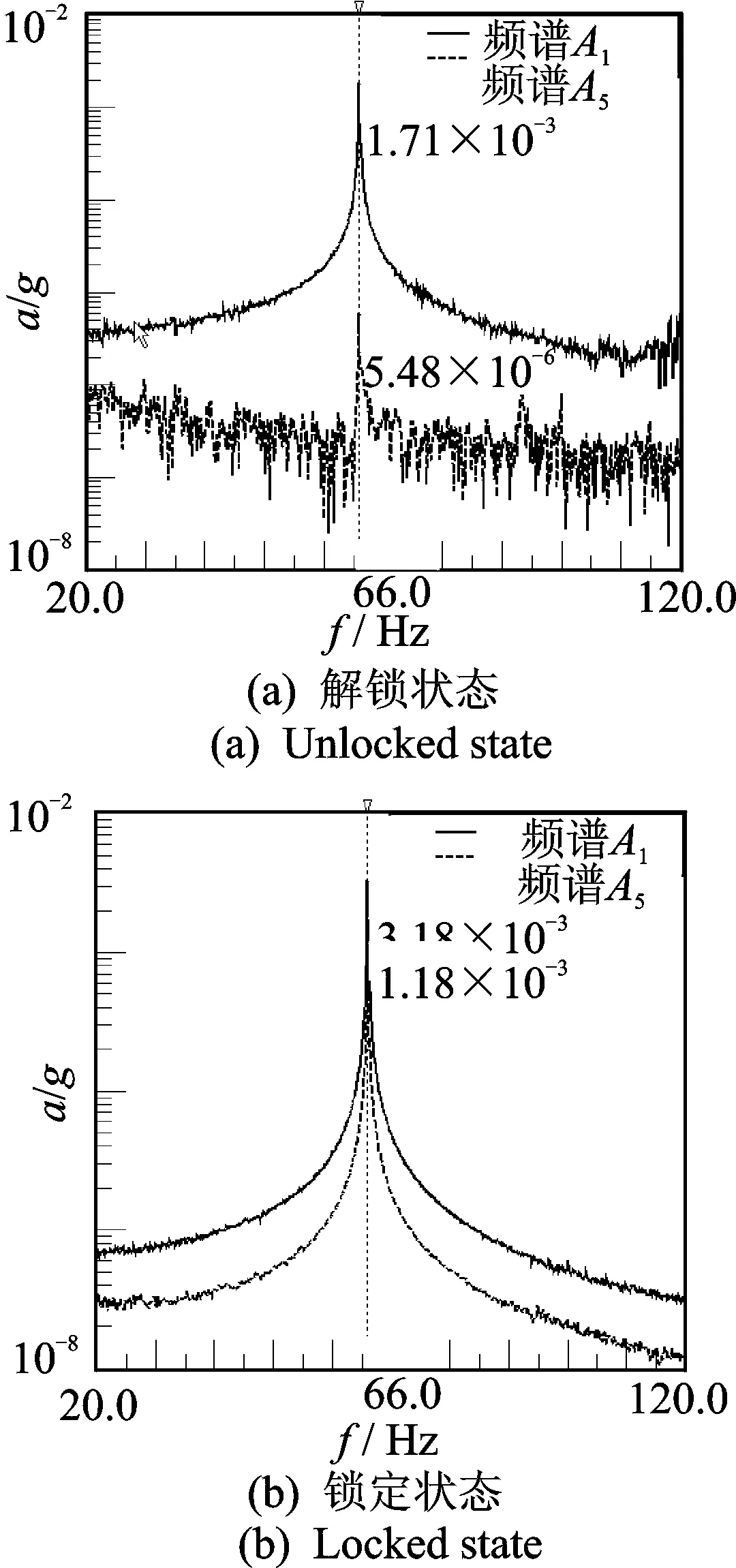
圖 9 定頻1正弦激勵下A1和A5的加速度頻譜圖Fig.9 Acceleration spectrum diagrams of measuring points A1 and A5 under sinusoidal excitation for constant frequency value 1

圖 10 定頻1正弦激勵下A2和A6的加速度頻譜圖Fig.10 Acceleration spectrum diagrams of measuring points A2 and A6 under sinusoidal excitation for constant frequency value 1

圖 11 定頻1正弦激勵下A3和A7的加速度頻譜圖Fig.11 Acceleration spectrum diagrams of measuring points A3 and A7 under sinusoidal excitation for constant frequency value 1

圖12 定頻1正弦激勵下A4和A8的加速度頻譜圖Fig.12 Acceleration spectrum diagrams of measuring points A4 and A8 under sinusoidal excitation for constant frequency value 1

圖 13 定頻1正弦激勵下A1和A5的時域信號圖Fig.13 Time-domain signal diagrams of measuring points A1 and A5 under sinusoidal excitation for constant frequency value 1
3.2.2 隔振效果分析
在獲得傳遞率數據的基礎上,通過插入損失計算,可以量化評判系統的隔振效果。插入損失計算公式如下
J=1-PunlockAm/PlockAm
其中:J為插入損失;PunlockAm為解鎖狀態下Am測點的加速度頻譜峰值響應;PlockAm為鎖定狀態下Am測點的加速度頻譜峰值響應。
根據上述計算公式,將F1~F4點激振時,在定頻1和定頻2正弦激勵下,對A5,A6,A7和A8這4個測點的插入損失進行計算,并采用一定的加權計算方法進行數據處理,所得結果如表 5所示。可以看到,載荷隔振裝置對定頻1的輸入隔振效率(插入損失)平均為97.00%,對定頻2的輸入隔振效率(插入損失)平均為79.76%。該微振動試驗系統的合理性和有效性得到了充分驗證,且隔振效果的量化分析結果也證明了該測試方法的可實施性。
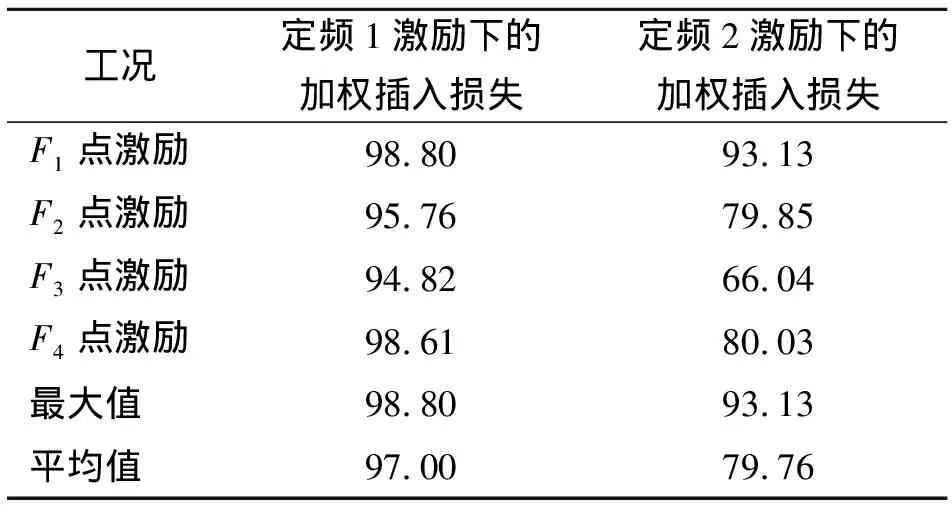
表 5 插入損失計算結果
4 結束語
通過合理模擬衛星在軌工作環境,設計并搭建了一套微振動試驗系統,得到了載荷隔振裝置在解鎖和鎖定兩種狀態下的模態和傳遞率測試結果。通過對比分析,量化給出了載荷隔振裝置的減隔振效果,為載荷隔振裝置的性能評估提供了可靠依據。該試驗方法可推廣到其他衛星隔振系統,對衛星減隔振系統設計具有參考價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
