基于PVDF壓電薄膜的仿生觸覺檢測系統研究
2019-06-25 09:18:22朱劍鋒李永超劉麗雙
壓電與聲光 2019年3期
關鍵詞:信號
辛 毅,徐 洋,朱劍鋒,劉 濤,李永超,劉麗雙
(吉林大學 儀器科學與電氣工程學院,吉林 長春 130061)
0 引言
觸覺是人類感知外界環境的一種重要知覺。目前將以人類觸覺為機理的觸覺傳感器應用在仿生皮膚領域,使智能機械具備人的感知能力,可對機械、溫度、光學及生物刺激做出快速判斷反應[1]。靈敏度是檢驗觸覺傳感器性能的主要指標[2],當前壓電式傳感器靈敏度高,固有頻率高,信噪比強,動態響應寬,國內外應用廣泛。聚偏氟乙烯(PVDF)是一種高分子壓電聚合物,PVDF壓電薄膜相比壓電晶體、壓電陶瓷等壓電材料具有柔韌性好,介電強度高,聲阻抗低,質量小,動態響應寬等優點,同時具備熱點性[3],其被廣泛應用在新型壓電觸覺傳感器領域。
本文依據PVDF壓電薄膜壓電效應基本原理,仿生人體生理皮膚結構層,設計了雙凸點拱形觸覺傳感器。通過傳感器對比測試實驗,驗證了雙凸點拱形觸覺傳感器滑覺信號靈敏系數最佳,傳感器上凸點層仿生人類皮膚乳突線層,下凸點層仿生人類皮膚中脊線層,單敏感元仿生邁斯納小體結構,系統對傳感器的采集信號進行放大、濾波、傅里葉變換等處理分析,通過信號幅值的均值大小判定檢測觸覺信號,信號幅值方差判定檢測滑覺信號,并由信號的幅頻值來設定頻率閾值、幅度閾值,判斷熱覺信號,實現觸覺傳感器的仿生皮膚功能。
1 總體設計
1.1 系統設計框圖
圖1為仿生觸覺檢測系統設計框圖。PVDF壓電薄膜雙凸點拱形傳感器采集到觸覺信號,經信號調理電路進行電荷、電壓放大,濾波去除干擾噪聲,信號正向抬升及電壓反饋跟隨。通過MSP430F149單片機數據采樣轉換,經虛擬串口傳送到上位機LabVIEW軟件中分析處理,軟件前面板窗口可讀取信號及幅頻特性曲線、觸滑熱信號。
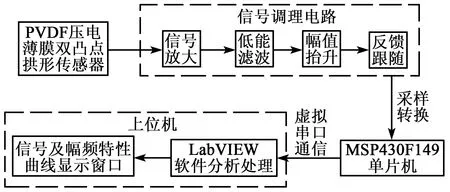
圖1 仿生觸覺檢測系統設計框圖
1.2 PVDF壓電薄膜基本原理
圖2為PVDF壓電薄膜正壓電效應圖。由圖可見,PVDF壓電薄膜受到外力F作用產生機械形變時,其內部產生極化現象,上、下相對表面產生個數相等、極性相反電荷,形成電位差,稱為正壓電效應[5]。
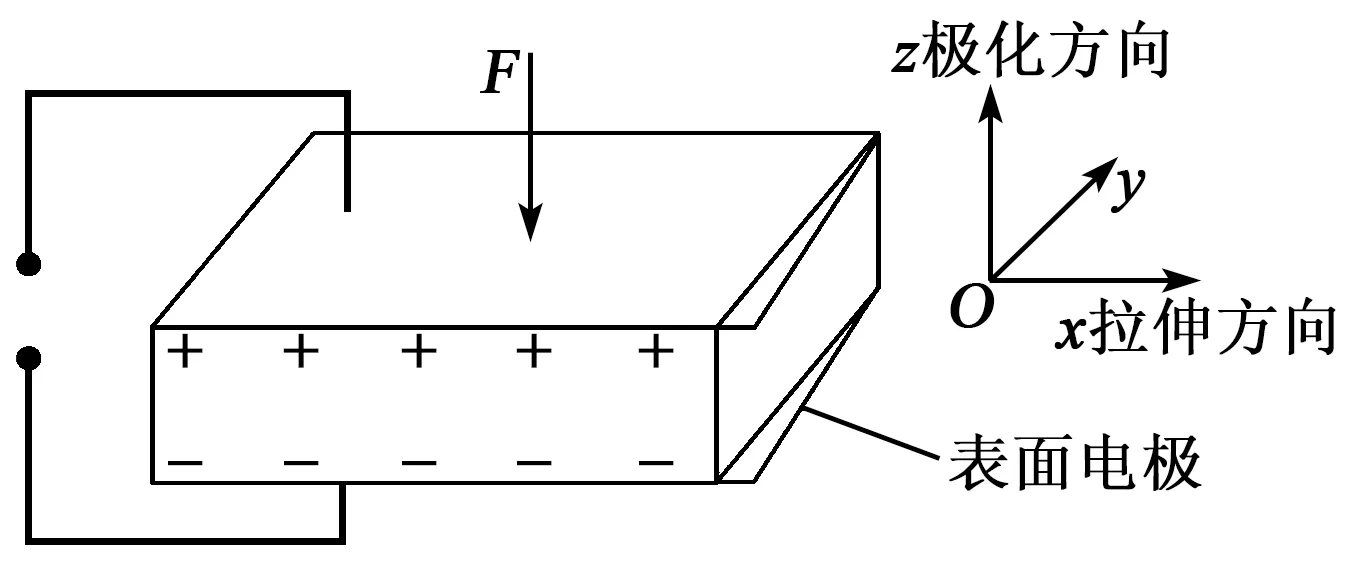
圖2 PVDF壓電薄膜正壓電效應
研究表明,壓電薄膜作用模式主要有d31模式和d33模式。d31模式中,壓電薄膜受力產生的應變與電荷極化方向垂直;d33模式中,壓電薄膜受力產生的應變與電荷極化方向相同。同作用力下,d31模式比d33模式更易產生較大應變,能產生更多電荷[6]。如圖3所示,當力F作用在上、下拱形基底上的壓電薄膜,使薄膜產生垂直力F方向的拉伸形變,增大薄膜d31工作模式,較平面形基底可生成更多極化電荷,增大輸出信號。
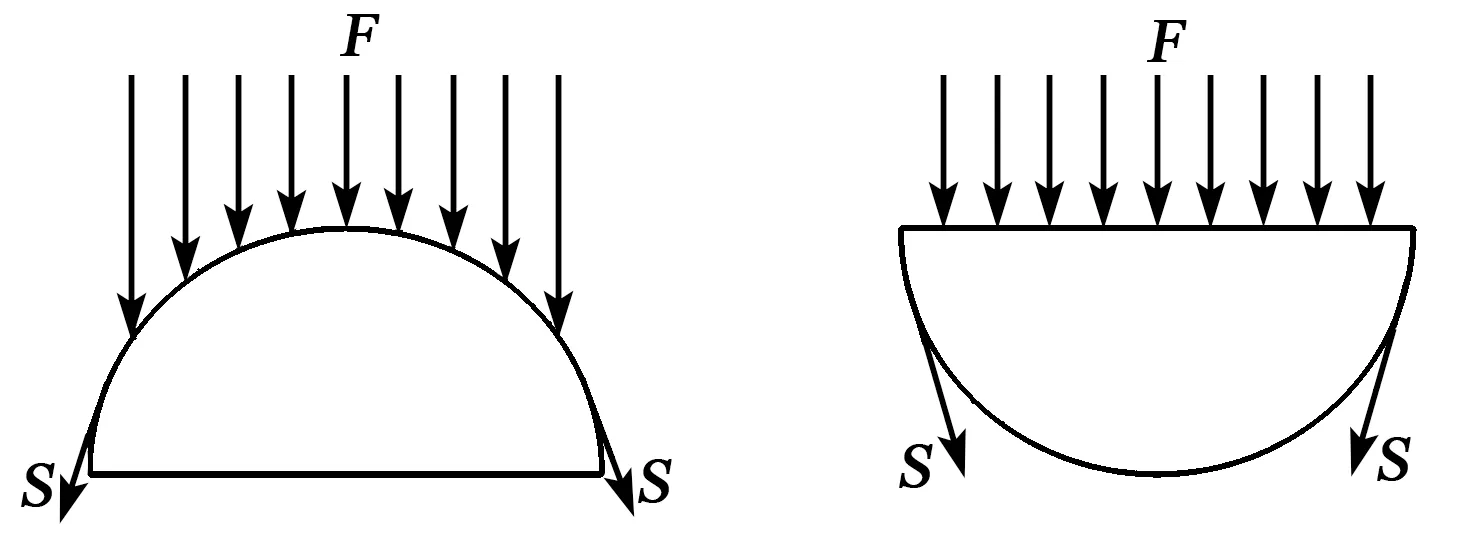
圖3 拱形基底受力產生的應變示意圖
1.3 雙凸點拱形結構設計
人類通過分布在皮膚不同深度的多種機械刺激感受器感知外界環境物質。基于仿生學,觸覺傳感器近似人手指頭大小,其尺寸為1.8 cm×1.7 cm,內徑0.8 cm,近似手指肚厚度,整體為正弦拱形結構,如圖4所示。增大PVDF壓電薄膜受力拉伸形變,增強d31工作模式,提高傳感器靈敏度[7]。銅箔具有良好的回彈性和導電性能,選取厚為2 mm的銅箔作為凸點層,上、下凸點材質為銅箔,上凸點的點間距為400 μm,仿生手指皮膚表層乳突紋線,增大傳感器與接觸物質表面最大靜摩擦力,其方向垂直壓電薄膜極化方向,提高傳感器靈敏度[8];下凸點仿生皮膚內部中間脊結構,同時增大傳感器的有效面積,同樣外力下會產生更多極化電荷[9]。PVDF壓電薄膜附在下凸點銅箔層表面,各壓電薄膜下凸點敏感單元仿生人體皮膚中的邁納斯小體,邁納斯小體可快速響應3~40 Hz低頻動態范圍窄的外界刺激,人體皮膚內大量多種感受器可慢響應低頻0.4~3.0 Hz、快響應高頻40~100 Hz持續向下的壓力,橫向皮膚拉伸和皮膚滑動等外界刺激,壓電薄膜一般動態響應寬為0.1~200 Hz,滿足仿生設計要求[10]。導電極由薄銅片和漆包線組成,將信號線從壓電薄膜正、負兩導電極引出,橡膠彈性基底具有粘彈性,傳遞信號時可減少載荷能量在傳導過程中的消耗。
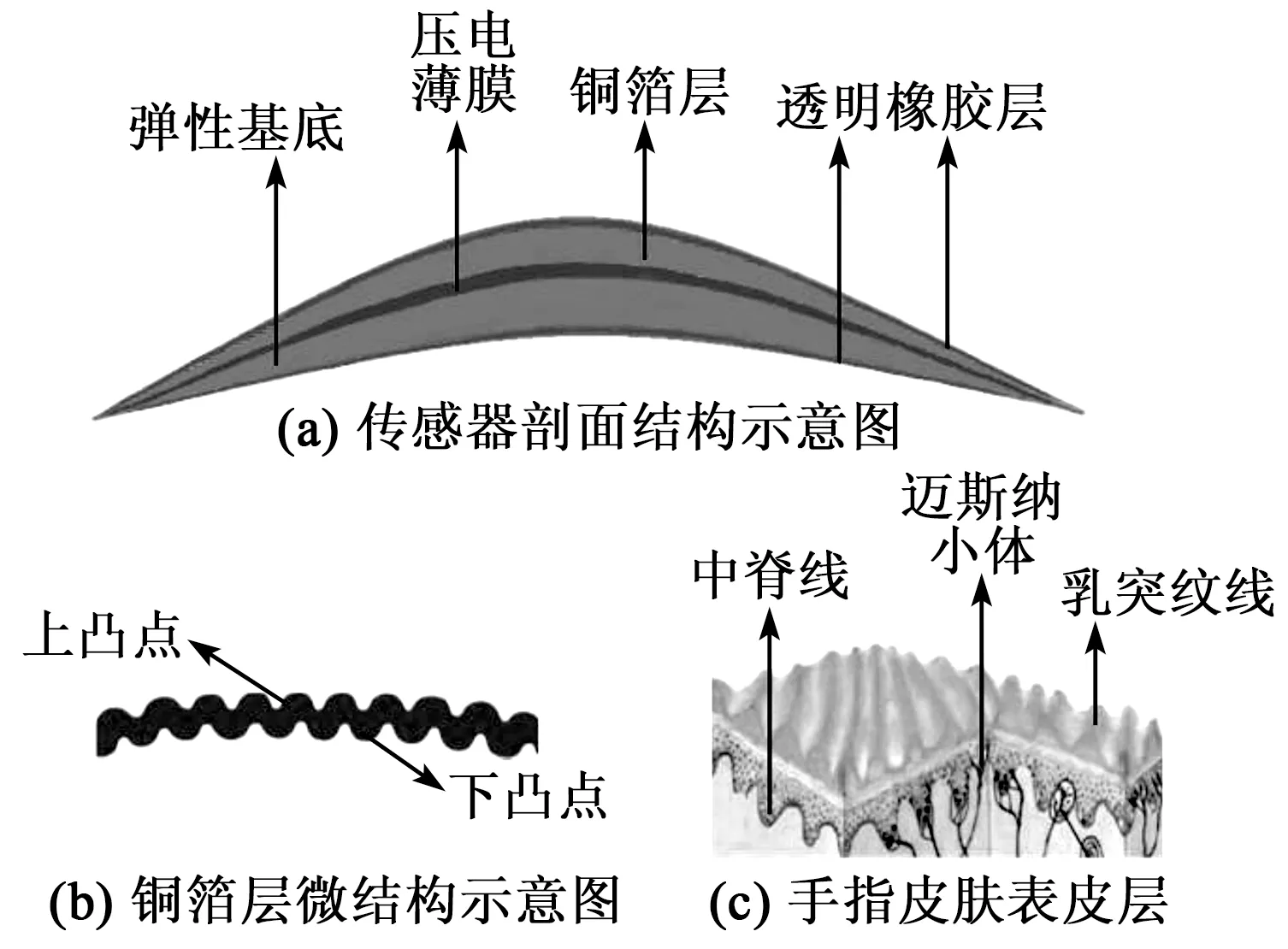
圖4 雙凸點拱形傳感器結構示意圖
2 信號調理電路設計
圖5為信號調理電路,包括電荷放大、電壓放大、低通濾波、電壓抬升及電壓反饋跟隨等設計。圖中,電路將傳感器采集到的電荷信號放大轉換為電壓信號,放大器A0選用CA3140型號,可實現高阻抗輸入轉換為低阻抗輸出,設計積分電容C1及電阻R1,使電路具備負反饋作用,調節R4實現電壓信號穩定放大,設計二階低通濾波電路,使輸入高頻信號對數幅頻特性以-40 dB/分倍頻速度下降,為后續軟件濾波降低難度。電路設計電壓抬升功能,根據采集到信號的強弱,通過調節R13將電壓信號進行抬升,便于后續MSP430F149單片機識別處理。為減輕信號源影響,提高帶負載能力,設計電壓跟隨電路,可穩定電壓、增強品質因數。為滿足系統集成化高,體積小的要求,選用內部集成4個運算放大器的OPA4347芯片[11],通過P2插口將模擬信號經單片機數據采樣轉換后,傳送給上位機。
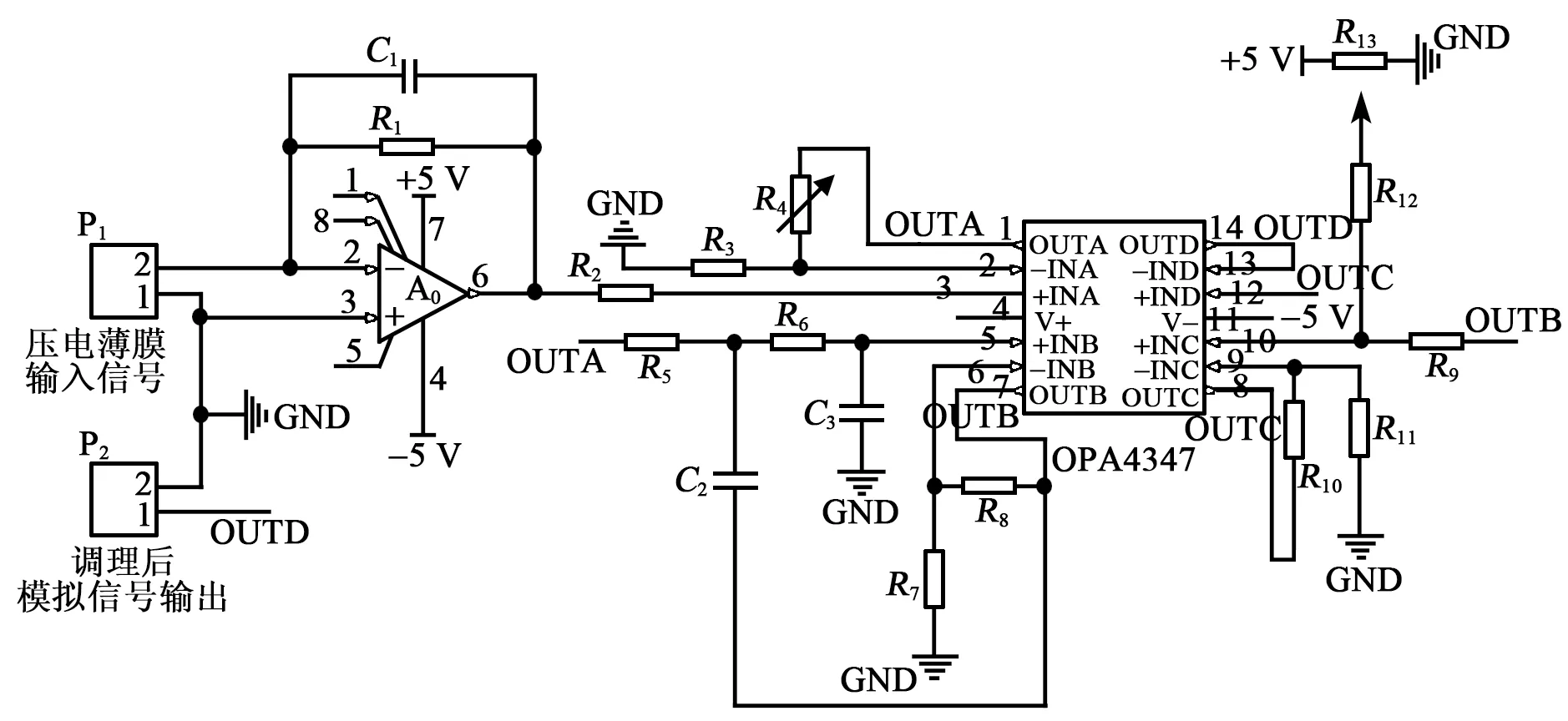
圖5 信號調理電路PCB原理圖
3 軟件設計
經硬件電路調理后,模擬信號由單片機MSP430F149處理轉換為數字信號,再經串口通訊傳送給上位機,數據存儲在特定文件中,由LabVIEW處理數顯[12]。如圖6所示,LabVIEW程序設計存儲控件,便于信號數據的收集存儲;程序添加級數可調的低通濾波器,極大地優化信號、去除噪聲;為了分析信號的頻域特征,程序添加幅頻特性控件;同時,程序設計指示燈控件、信號類型顯示窗口及幅值顯示窗口,辨別采集數據的類型大小。為判斷觸覺信號、滑覺信號及熱覺信號,程序采用閾值法,瞬間觸碰傳感器使得信號幅值突變、響應持續性差,因此,信號幅值均值大小可判定傳感器檢測到觸覺信號;平穩滑動傳感器使信號輸出幅值穩定,根據信號幅值方差可判定傳感器檢測到滑覺信號;由信號的幅頻值來設定頻率閾值、幅度閾值,判斷熱覺信號。程序前面板設置輸出信號波形圖顯示窗口、信號幅頻特性曲線顯示窗口、接口配置單元及觸滑熱覺信號判別指示燈等。
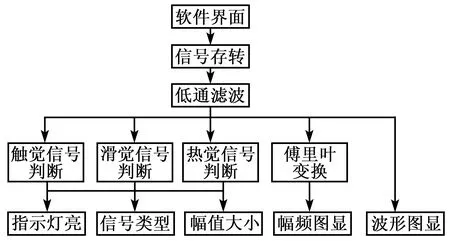
圖6 LabVIEW程序設計框圖
4 系統測試實驗
4.1 傳感器靈敏度對比測試分析
制作3種不同銅箔層凸點結構,其他條件全部相同的傳感器:無凸點拱形[13]、上凸點拱形(凸點層在接觸物體一側)及雙凸點拱形傳感器。在同樣實驗裝置環境下,分析各結構傳感器的輸出信號,計算對比靈敏度高低,傳感器對比實驗裝置圖如圖7所示。
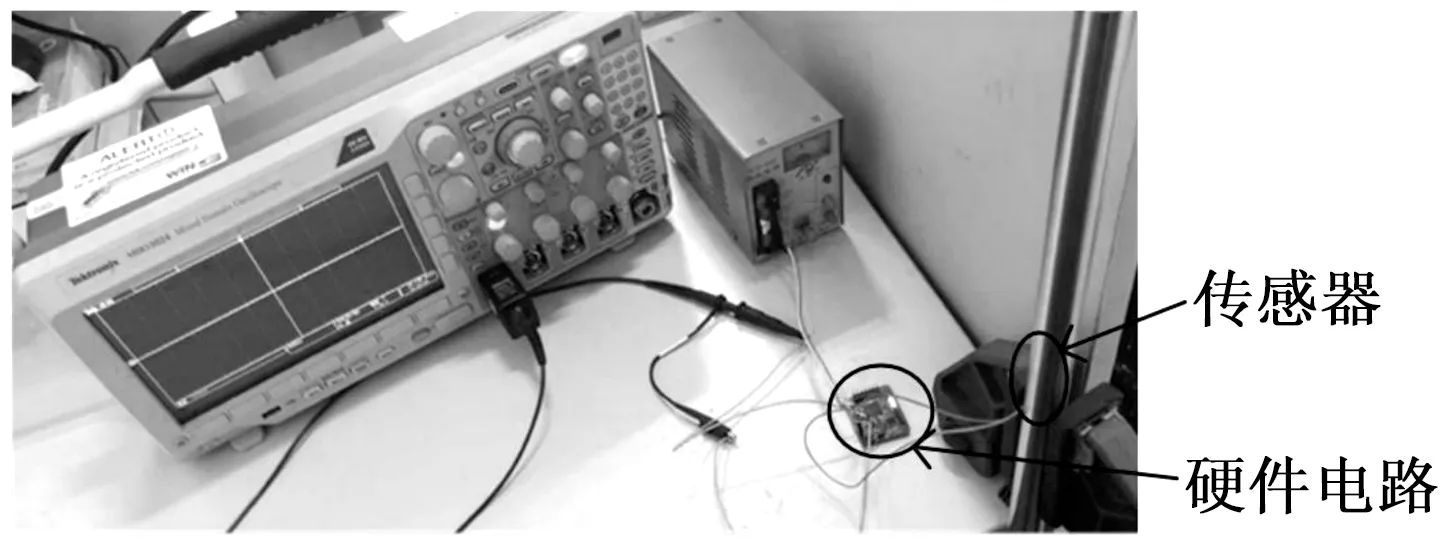
圖7 傳感器對比實驗裝置圖
由圖7可見,柱狀物低碳鋼棒與傳感器銅箔層間摩擦系數(μ)為0.56,±5 V直流電源給硬件調理電路供電。鋼棒在下滑時與夾持器固定端處的傳感器產生摩擦接觸,將傳感器采集到的電荷信號經硬件電路信號放大、濾波等調理后,傳輸到示波器中存儲下來,對檢測到的數據用Origin軟件進行分析處理,圖8為放大信號波形圖。
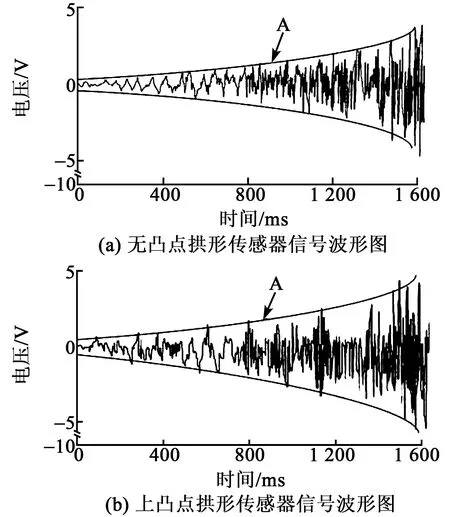
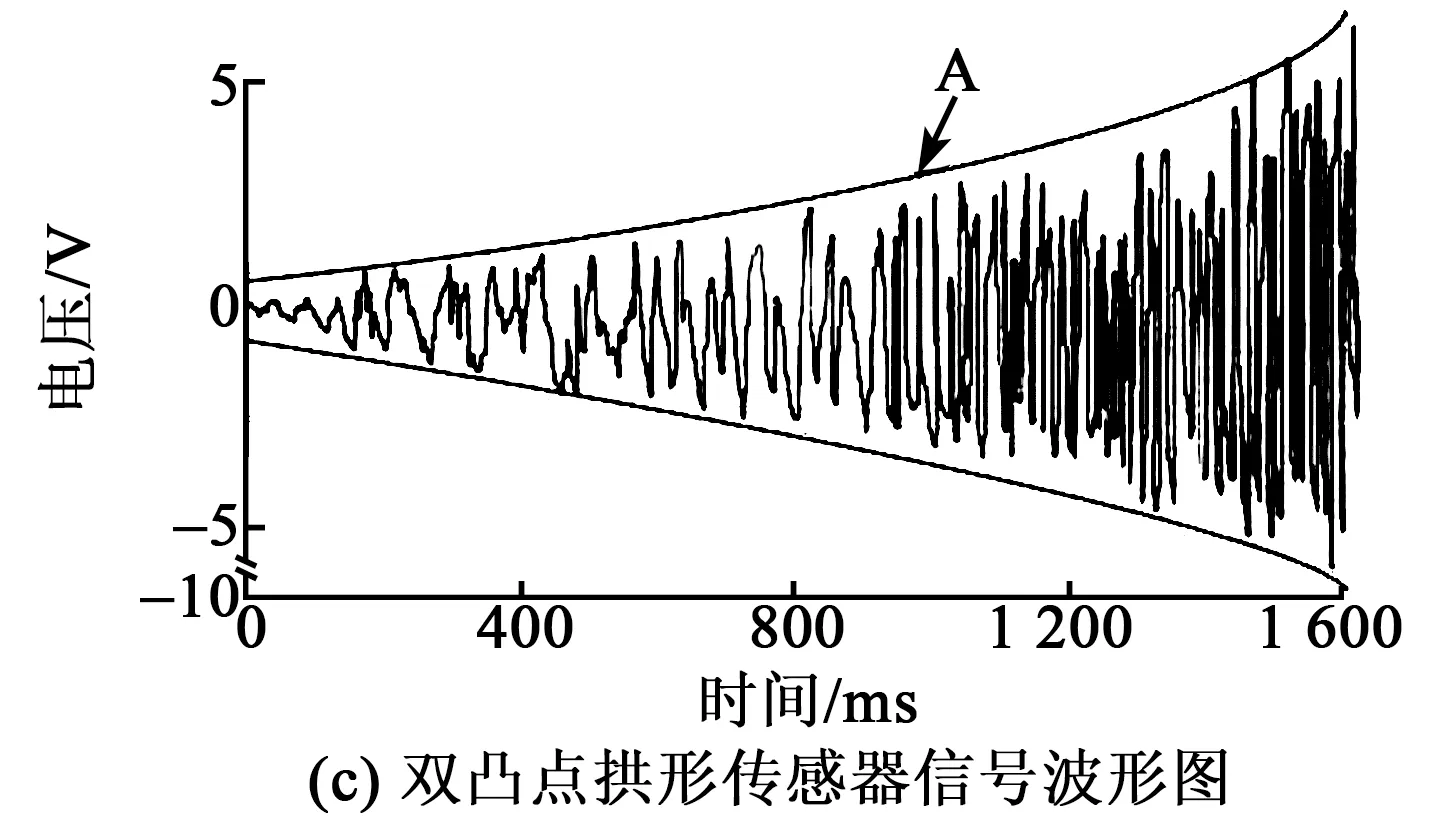
圖8 各傳感器采集信號輸出波形圖
圖8中,包絡線A表示輸出信號幅值趨勢走向。輸出信號幅值隨時間越來越大,呈線性關系,經過一定時間Δt,對比輸出幅值ΔV的大小,判別各傳感器靈敏度高低。鋼棒下滑觸碰傳感器,并勻加速滑動摩擦,使傳感器平穩對稱振動,產生形變;采集到正、負電信號,幅值大小總體成對稱分布。對3種結構的傳感器放大輸出信號選取正向幅值對比分析如圖9所示。
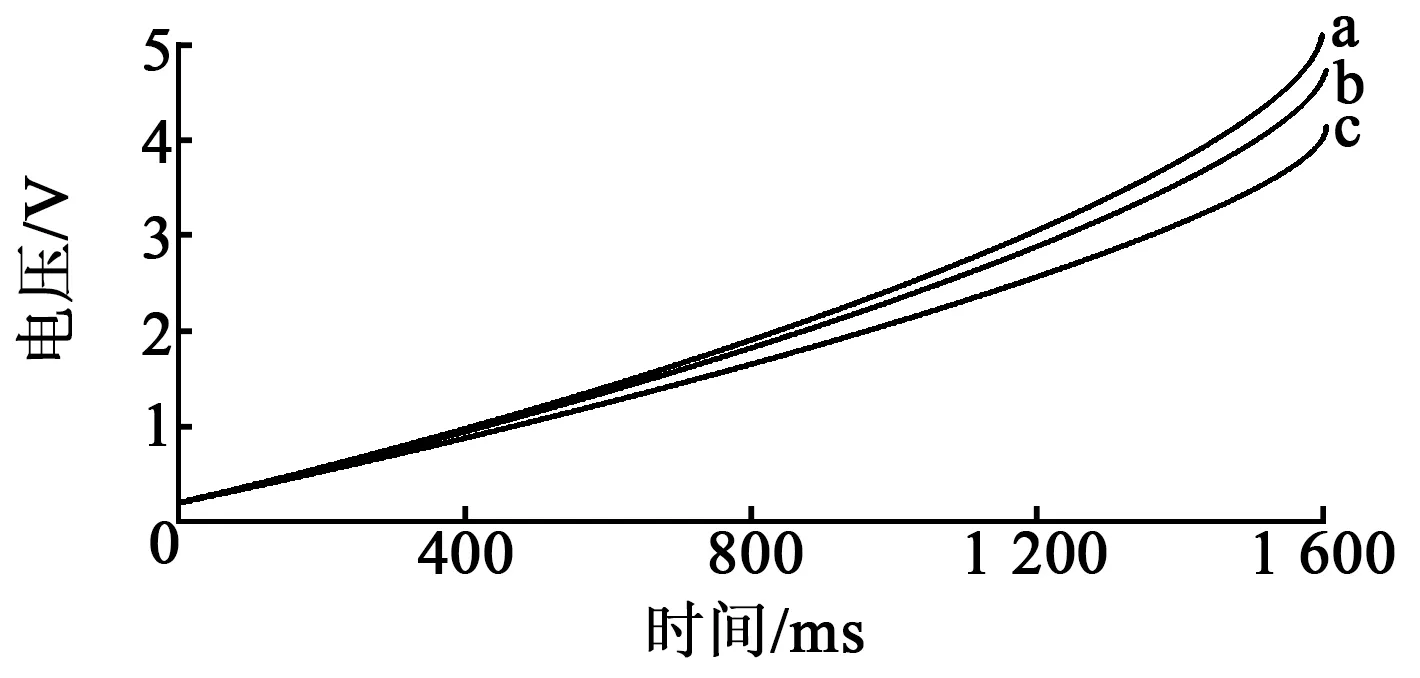
圖9 各傳感器輸出信號正向幅值對比
圖9中,曲線a、b、c分別表示雙凸點拱形、上凸點拱形及無凸點拱形正向幅值曲線。實驗初始,鋼棒下滑瞬間觸碰傳感器,各傳感器信號幅值突變,輸出觸覺信號,各傳感器輸出信號相同,表明3種結構傳感器對觸覺信號檢測靈敏相同;而后鋼棒下滑與傳感器完全充分摩擦滑動,使各傳感器平穩振動,在400 ms后,各傳感器檢測到滑覺信號,曲線a信號幅值大于曲線b、c,證明同一時間處,雙凸點拱形結構傳感器信號輸出幅值最大,其靈敏度更高;各傳感器采集信號同時反應了傳感器與鋼棒接觸不完全均勻,但不影響輸出信號整體趨勢走向,質量m、重力G的鋼棒,以初速度v在時間t內勻加速下滑距離L,壓力F垂直于傳感器,由牛頓力學運動原理可知:
(1)
該傳感器在F作用下輸出電壓信號V,則其靈敏度S為
S=V/F
(2)
在1 600 ms處各傳感器振動平穩,與下滑鋼棒摩擦充分,外界干擾小,此時計算得出3種不同結構傳感器對滑覺信號檢測靈敏系數分別為2.81×10-2V/(m·N)、3.22×10-2V/(m·N)、3.84×10-2V/(m·N),則雙凸點拱形結構傳感器靈敏系數是無凸點拱形結構傳感器的1.36倍,是上凸點拱形結構傳感器的1.19倍,雙凸點拱形結構提高了觸覺傳感器靈敏度,更適宜作為前端信號采集單元。
4.2 系統測試
下位機采集到數據傳送給上位機,上位機LabVIEW檢測分析程序串口配置選為虛擬COM6串口,每秒波特率為9 600,無奇偶校驗,數據位選用擴展ASCII8位及1.0停止位[14]。室溫25 ℃,將雙凸點拱形傳感器放在水平放置的低碳鋼棒上,反復勻速地在水平方向滑動傳感器,觀測前面板顯示窗口,其輸出波形如圖10所示。
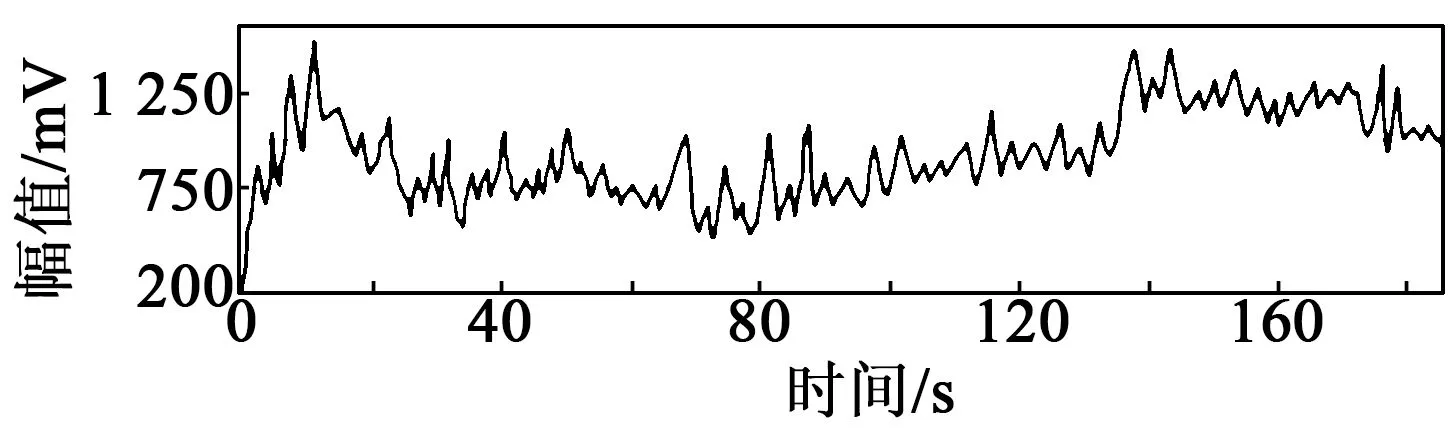
圖10 信號輸出波形顯示窗口
由圖10可見,傳感器剛觸碰到鋼棒時,受力使得傳感器形變,產生電信號,且信號突變,幅值增大為觸覺信號,同時滑動傳感器,系統檢測到觸覺信號和滑覺信號的疊加信號,在10 s處信號幅值最大;而后傳感器與鋼棒充分接觸,且單一水平滑動,傳感器觸覺信號消失,程序僅檢測到滑覺信號;約在120 s給低碳鋼棒加熱,PVDF具有高熱電性,傳感器輸出信號驟升,此時傳感器仍在滑動,程序檢測到滑覺和熱覺的疊加信號,信號幅頻特性曲線如圖11所示;130 s停止加熱后,鋼棒與外界環境熱交換,鋼棒溫度慢慢下降,傳感器檢測到的熱覺信號減小,輸出疊加信號亦減小;在180 s后,由于單一勻速滑動傳感器,此時系統僅檢測到滑覺信號。
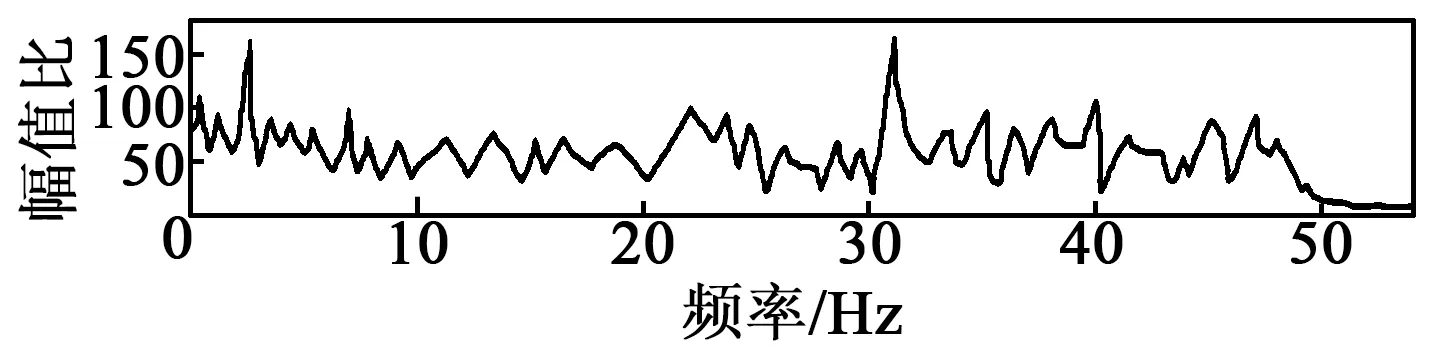
圖11 信號幅頻特性顯示窗口
熱覺信號頻率為0.1~2.5 Hz,滑動信號頻率高于10 Hz[15-16],圖11中在0~3 Hz及20 Hz附近信號較強,表明實驗120 s時鋼棒溫度升高,系統檢測到傳感器的熱覺信號、滑覺信號。此時,LabVIEW前面板顯示窗口中滑覺信號、熱覺信號指示燈亮,程序對采集數據傅里葉變換等進行計算處理,得出滑覺信號幅度為766.31 mV、熱覺信號幅度為1 262.29 mV,各頻率信號幅值比在50 dB附近震蕩,表明經調理電路、LabVIEW程序處理后,傳感器輸出信號得到增強,系統可以實時檢測數顯傳感器滑覺及熱覺信號幅值,系統前置調理電路低通濾波及程序設置濾波截止頻率為50 Hz,極大地抑制了工頻干擾,減少外界噪聲影響。
5 結束語
從人體皮膚觸覺感知及表皮層結構出發,依據PVDF壓電薄膜壓電效應原理,設計上、下層銅箔凸點,制作了雙凸點拱形結構傳感器。通過傳感器對比測試實驗,相比國內其他拱形結構傳感器,該結構傳感器的滑覺信號檢測靈敏系數得到提升,增強了觸覺傳感器與物質滑動摩擦信號、識別物質紋理能力,提高了傳感器觸碰感知外界物質性能;系統優化、集成了下位機信號調理電路,且設計LabVIEW軟件對信號數據讀取分析、濾波處理,實時顯示輸出信號波形圖,通過傅里葉變換等處理,采用閾值分析法判斷數顯傳感器觸滑熱覺信號,該系統可廣泛應用于仿生皮膚等機械裝置上,實現機械的人工智能化,同時在航天航空、醫療健康、智能制造等領域,有一定的應用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06