履帶式爬壁機器人優(yōu)化設(shè)計*
2019-07-02 09:18:08曹立超劉曉光蔣曉明周勇
自動化與信息工程 2019年2期
關(guān)鍵詞:優(yōu)化結(jié)構(gòu)
曹立超 劉曉光 蔣曉明 周勇
?
履帶式爬壁機器人優(yōu)化設(shè)計*
曹立超 劉曉光 蔣曉明 周勇
(廣東省智能制造研究所 廣東省現(xiàn)代控制技術(shù)重點實驗室)
針對履帶式爬壁機器人在運行過程中容易出現(xiàn)履帶脫離、磁鐵損傷、吸附不穩(wěn)定等問題,通過優(yōu)化履帶結(jié)構(gòu)、改善傳動裝置、改進(jìn)機器人本體結(jié)構(gòu),提出了履帶式爬壁機器人優(yōu)化設(shè)計方案。經(jīng)仿真結(jié)果和樣機實驗測試驗證,該爬壁機器人負(fù)載能力強、穩(wěn)定性好、運行靈活性好。
爬壁機器人;永磁吸附;履帶
0 引言
爬壁機器人作為特種機器人,可以攜帶一定的工具設(shè)備,在玻璃幕墻清洗、船體外壁噴涂和除銹、石化罐體焊縫探傷、大型管道及高塔視頻監(jiān)測等場合代替人類更快、更好地完成作業(yè)任務(wù)[1-4]。
目前研究較多的爬壁機器人是履帶式磁吸附爬壁機器人。胡紹杰[5]等研究了履帶式爬壁機器人磁吸附單元的優(yōu)化問題,但只是增加了磁吸附力,沒有解決磁鐵斷裂的問題;王瑞[6]等對三角履帶爬壁機器人進(jìn)行模擬仿真,該機器人雖然實現(xiàn)了越障功能,但穩(wěn)定性較差、負(fù)載能力不足;熊雕[7]等對履帶式爬壁機器人進(jìn)行受力分析與穩(wěn)定性仿真研究,但沒有深入研究履帶式爬壁機器人穩(wěn)定可靠運行的條件。
履帶式爬壁機器人在連續(xù)運行過程中會出現(xiàn)履帶脫離、吸附不穩(wěn)定、磁鐵損壞等問題。為此,本文通過優(yōu)化履帶結(jié)構(gòu)、改善傳動裝置、改進(jìn)機器人本體結(jié)構(gòu),實現(xiàn)履帶式爬壁機器人的優(yōu)化設(shè)計方案并進(jìn)行實驗驗證。
1 爬壁機器人優(yōu)化
1.1 履帶易脫離優(yōu)化
履帶式爬壁機器人的吸附單元(磁鐵)全部集中在雙側(cè)履帶上[8],機器人在實際運行過程中,雙側(cè)履帶和機器人本體屬于2個單獨機構(gòu)。爬壁機器人需要長時間連續(xù)在傾斜角為90°~180°的立面上工作,其兩側(cè)的履帶需要承受機器人本體和負(fù)載的重量(一般在1000 N以上)。當(dāng)機器人在壁面上沿著水平方向運行時(如圖1所示),可能會發(fā)生履帶與機器人本體脫離的現(xiàn)象,如圖2所示。
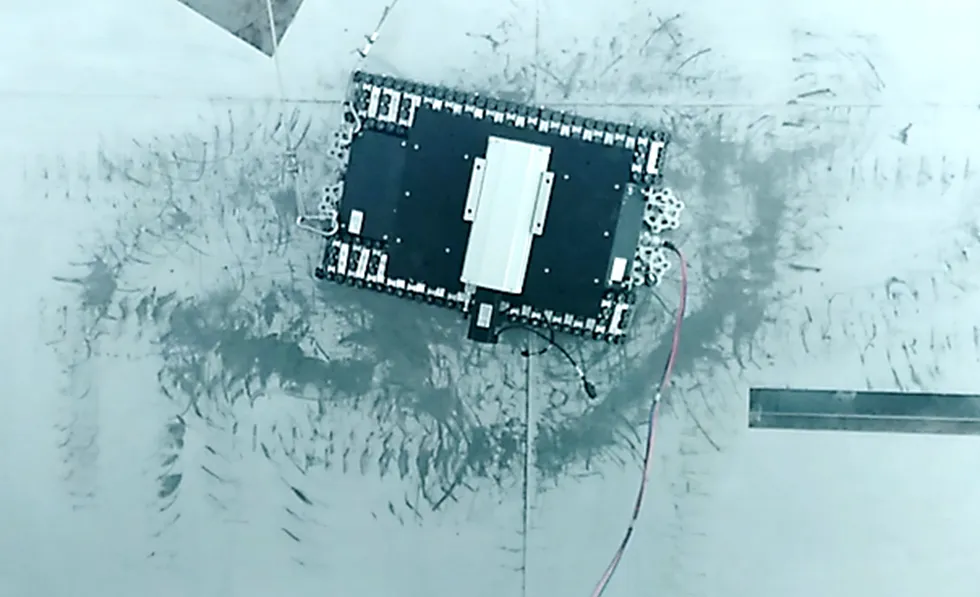
圖1 機器人沿著水平方向運行

圖2 履帶脫離機器人現(xiàn)象
目前常見的履帶式爬壁機器人基本采用鏈輪鏈條傳動結(jié)構(gòu)或同步帶同步輪傳動結(jié)構(gòu)。這種結(jié)構(gòu)在運行一段時間(<0.5 h)后,鏈輪(同步輪)常常會脫離鏈條(同步帶)結(jié)構(gòu)。輕者只是機器人停止工作,無法脫離壁面;重者會導(dǎo)致機器人從運行壁面上脫落,發(fā)生事故。針對以上問題,本文提出一種新式履帶結(jié)構(gòu),如圖3所示。
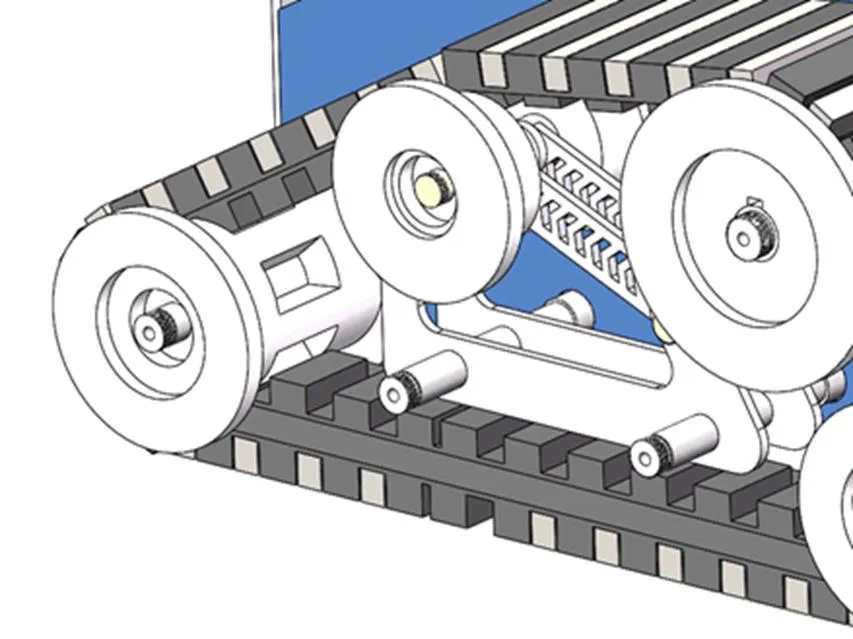
圖3 新式履帶結(jié)構(gòu)
原有履帶采用鏈輪和鏈條結(jié)構(gòu),齒形比較小,齒數(shù)較多,連續(xù)運行時鏈輪可能脫離。優(yōu)化為圖3所示新式履帶結(jié)構(gòu)后,齒數(shù)變少,齒形變大,履帶張緊后齒輪較難從履帶中脫離。另外在齒輪外增加1個擋片,也可以防止履帶從齒輪中脫離。這樣在雙重防護(hù)下,解決了爬行機器人履帶脫離問題。經(jīng)測試,機器人連續(xù)運行1 h沒有發(fā)生履帶脫離現(xiàn)象。
1.2 永磁鐵斷裂磨損優(yōu)化
履帶式爬壁機器人采用獨立不連續(xù)分布的長條狀磁鐵提供吸附力,如圖4所示。永磁鐵屬于硬脆性材料,被吸附壁面剛度較大,兩者接觸吸附時會產(chǎn)生較大沖擊力,容易損壞永磁鐵。
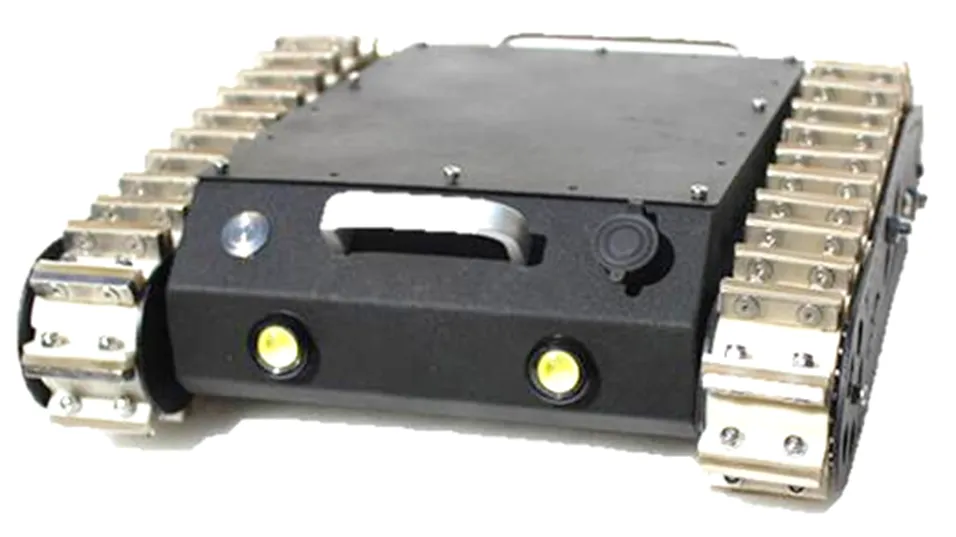
圖4 獨立不連續(xù)分布的永磁鐵履帶
針對以上問題,本文提出整體式橡膠履帶結(jié)構(gòu),如圖5所示。履帶采用橡膠一體加工成型,在保證足夠強度的前提下,既減輕機器人的重量,還增大機器人與吸附壁面之間的摩擦力,保證機器人穩(wěn)定行走。
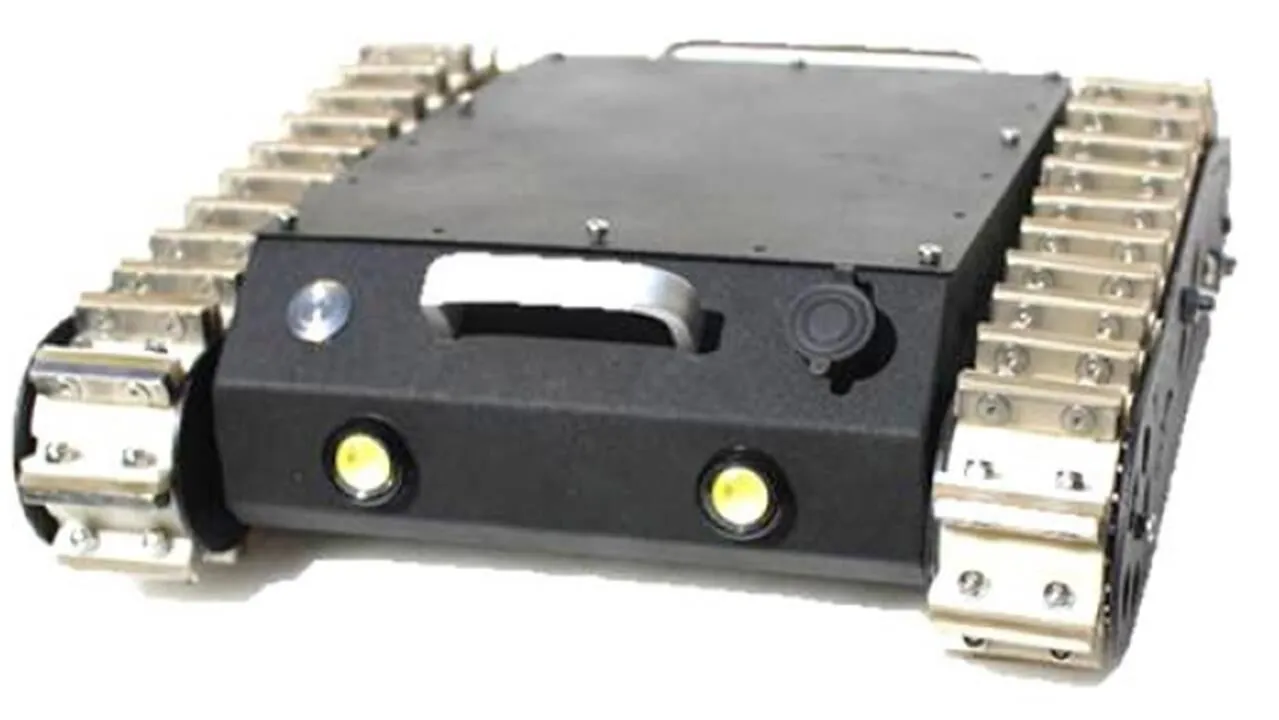
圖5 整體式橡膠履帶結(jié)構(gòu)
由圖5可看到,永磁鐵交替布置在橡膠履帶中間,且永磁鐵高度略小于橡膠高度(約0.5 mm)。當(dāng)機器人吸附在壁面上工作時,在磁吸附力的作用下磁鐵周圍的橡膠發(fā)生變形。利用橡膠的減震性,使永磁鐵和壁面間的剛性接觸轉(zhuǎn)變?yōu)槿嵝越佑|,在保證足夠磁吸附力的同時保護(hù)磁鐵不發(fā)生斷裂
1.3 機器人吸附穩(wěn)定可靠性優(yōu)化
爬壁機器人要保證穩(wěn)定可靠地吸附在壁面,需要有足夠的磁吸附力。與此同時,磁吸附力增加會加大機器人運行時的摩擦力;摩擦力過大需要增大電機驅(qū)動力;增大電機驅(qū)動力需要使用更大的電機與減速器,加大了機器人整體重量,需要更大的磁吸附力才能穩(wěn)定可靠地吸附在壁面上。吸附力(摩擦力)、驅(qū)動力和自重載荷3大矛盾體的協(xié)調(diào)設(shè)計是機器人穩(wěn)定可靠吸附的關(guān)鍵。
機器人在垂直壁面(鋼)上的受力模型如圖6所示。
當(dāng)機器人靜止吸附在壁面上時,滿足式(1)的靜力平衡。
=
+1=(1)
F?永磁鐵對壁面的吸附力 N?壁面對機器人的支持力 f?機器人對壁面的摩擦力 G?機器人重力 v ?機器人前進(jìn)速度 F1?機器人前進(jìn)時的動力
圖6 爬壁機器人受力模型
當(dāng)機器人在壁面上運行時,橡膠和鋼之間的摩擦系數(shù)變?yōu)闈L動摩擦系數(shù),取0.1左右。因此,為使機器人在壁面上穩(wěn)定吸附行走,磁吸附力要達(dá)到重力的10倍。本文設(shè)計的爬壁機器人自重為370 N,載重為350 N,總重量為720 N。機器人的磁吸附力要達(dá)到7200 N才能保證其穩(wěn)定可靠運行。
采用電磁分析軟件flux對單塊磁鐵的電磁力進(jìn)行分析。磁鐵外形尺寸為60 mm×20 mm×10 mm,鋼板厚度為10 mm;已知釹鐵硼的回復(fù)磁導(dǎo)率為1.05,剩磁為1.202 T。flux建模示意圖如圖7所示。
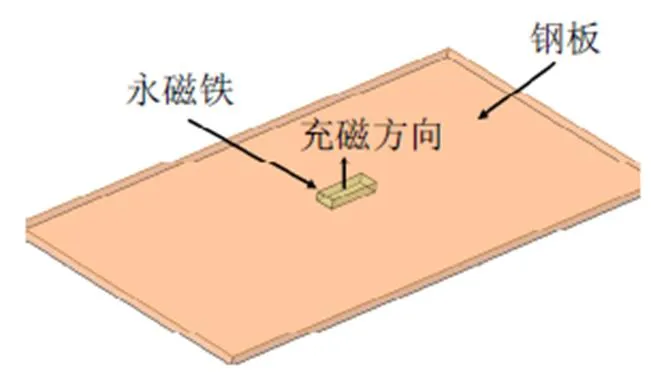
圖7 flux建模示意圖
模擬得到磁鐵吸附力與被吸附鋼板間間隙關(guān)系曲線圖如圖8所示。
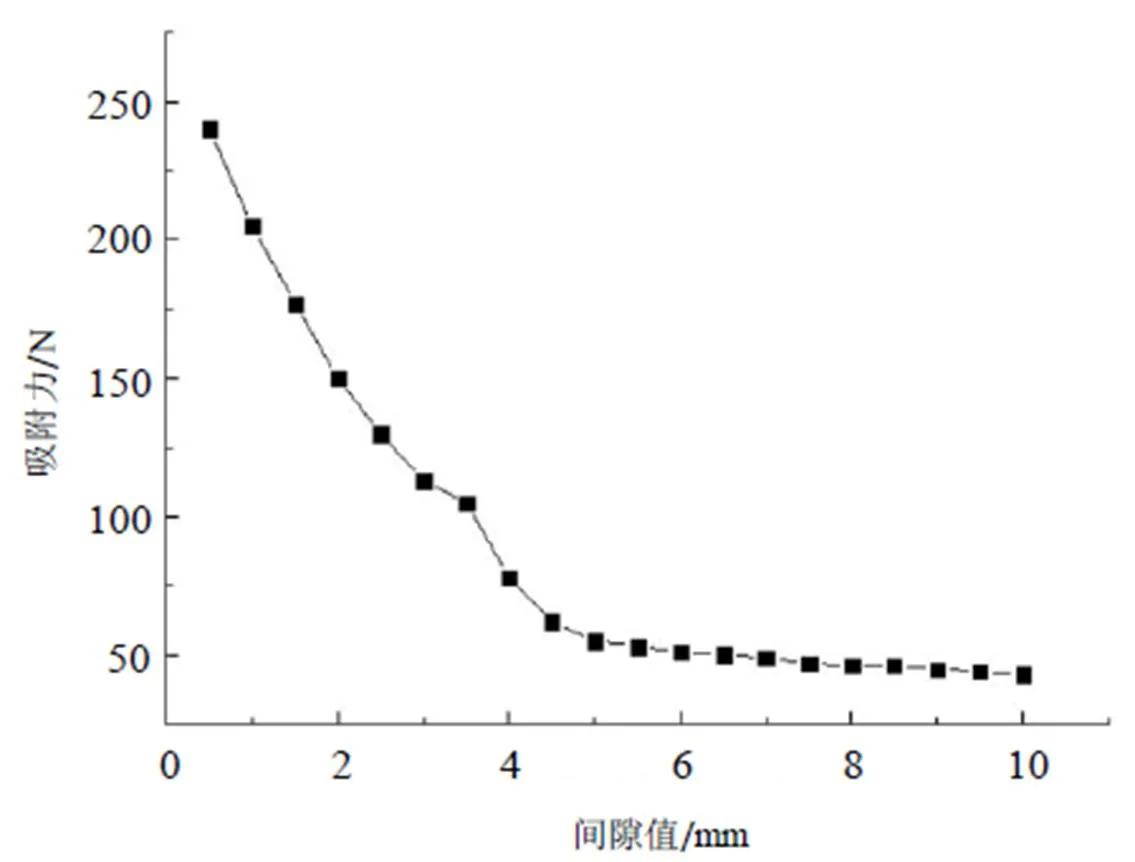
圖8 磁吸附力與間隙關(guān)系示意圖
由圖8可知:隨著間隙值增加,磁鐵的磁吸附力以指數(shù)衰減形式急劇下降。因此,為增加磁鐵的磁吸附力,應(yīng)盡可能減少磁鐵與壁面間的接觸距離。本文設(shè)計的履帶橡膠墊的高度約為0.5 mm,磁吸附力約為240 N,因此需要30塊磁鐵同時吸附(磁吸附力大于7200 N)才能保證機器人穩(wěn)定行走。本文機器人采用雙履帶結(jié)構(gòu),長度為550 mm,單側(cè)同時有16塊磁鐵吸附在壁面,則整個履帶的吸附力達(dá)到7680 N(2×16×240),滿足爬壁機器人穩(wěn)定可靠吸附的需要。
為了保證機器人運行穩(wěn)定可靠,在機器人底部設(shè)計了帶有萬向滾珠的輔助吸附裝置,如圖9所示。
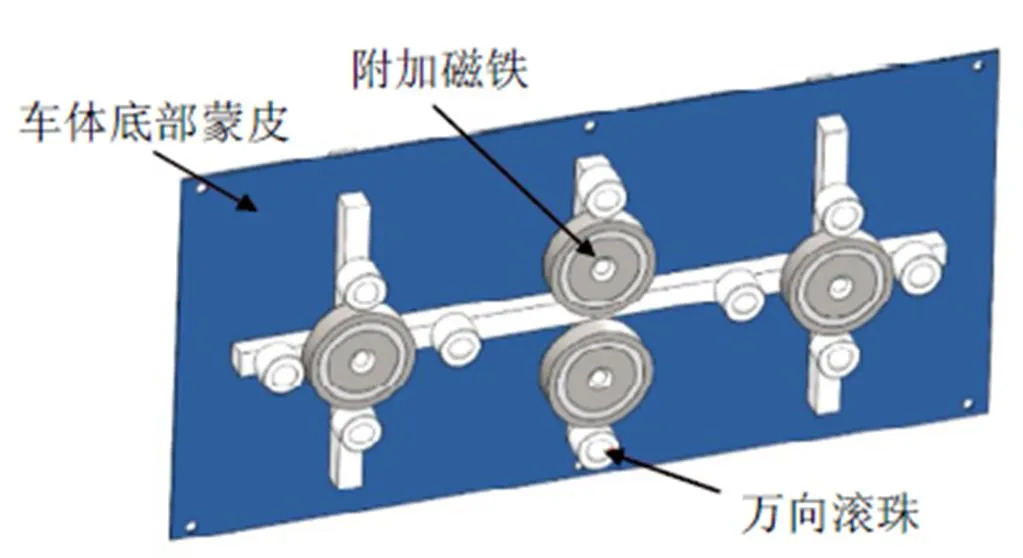
圖9 輔助吸附裝置
從圖9輔助吸附裝置的安裝布置可以看出,圓形的輔助吸盤分散布置在機器人底部,每1個輔助吸盤四周分布著幾個萬向滾珠。萬向滾珠的工作高度距離吸附壁面約0.5 mm,吸盤距離壁面為0.8 mm~1.0 mm。這樣當(dāng)機器人吸附在壁面上時,在幾個輔助吸盤對壁面的吸附力作用下,整個機構(gòu)會緊靠壁面,萬向滾珠基本接觸到壁面。同時由于吸盤略高于滾珠,在滾珠的支撐下,吸盤不會吸附在壁面上,保證運行的靈活性。優(yōu)化設(shè)計得到的履帶式爬壁機器人整體結(jié)構(gòu)如圖10所示。
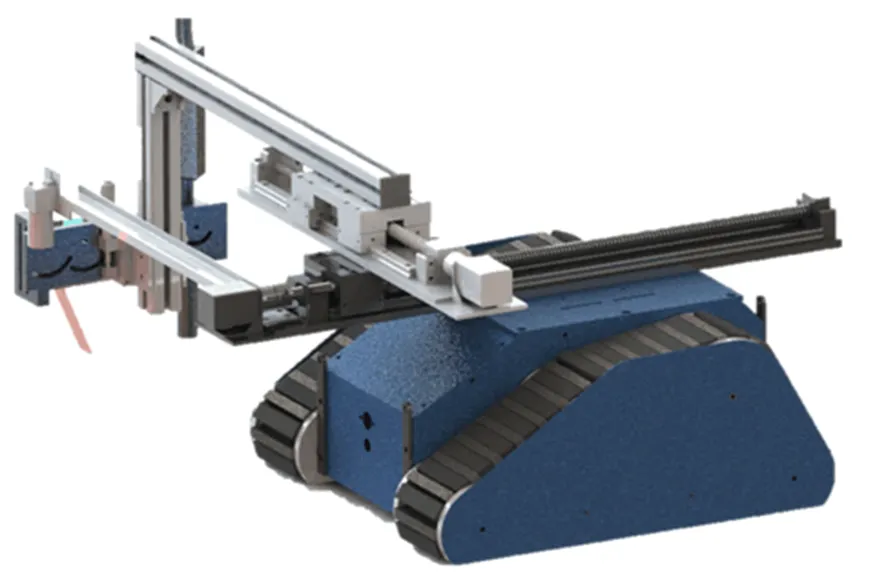
圖10 履帶式爬壁機器人整體結(jié)構(gòu)
2 實驗驗證
2.1 仿真結(jié)果分析
為驗證方案可行性,對爬壁機器人的運行過程進(jìn)行仿真分析。在SolidWorks建立爬壁機器人的模型,并將其導(dǎo)入ADAMS;對各零部件的材料屬性進(jìn)行設(shè)置并添加相應(yīng)的約束關(guān)系;設(shè)置重力等外部環(huán)境,如圖11所示。
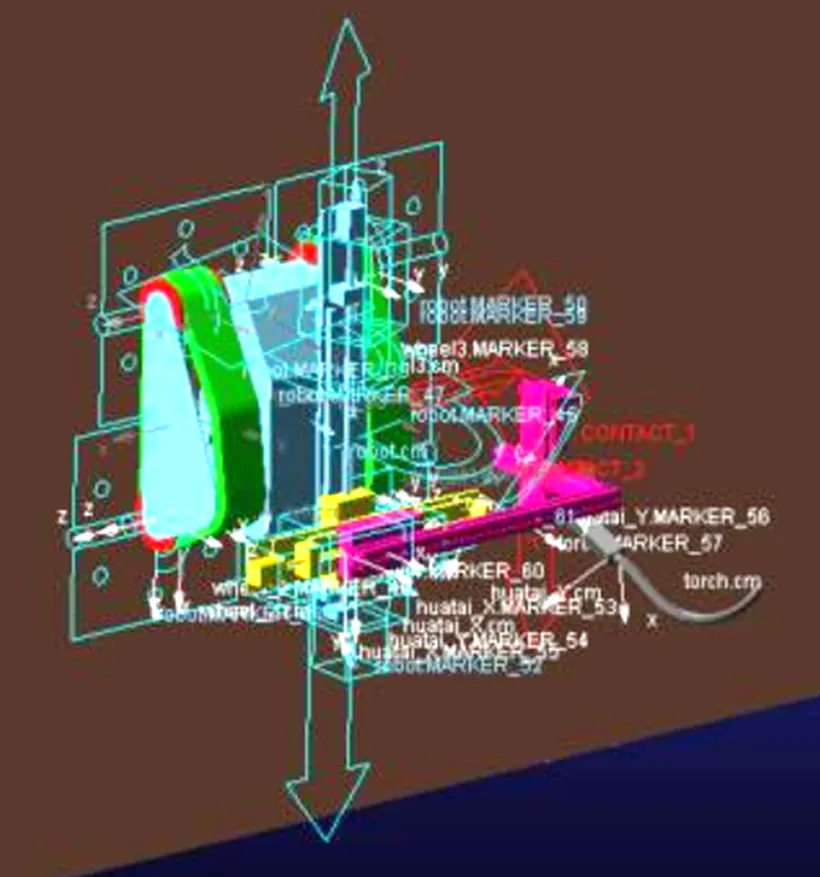
圖11 爬壁機器人仿真模型
在爬壁機器人兩側(cè)履帶上分別添加接觸力,并根據(jù)鋼與橡膠的摩擦系數(shù),設(shè)置靜摩擦系數(shù)為0.35,滾動摩擦系數(shù)為0.1。根據(jù)計算結(jié)果,設(shè)置1個垂直壁面向里的作用力7680 N。在兩側(cè)主動輪上添加驅(qū)動,仿真時間設(shè)置為300 s,運行速度與實際保持一致10 mm/s,仿真結(jié)果如圖12所示。
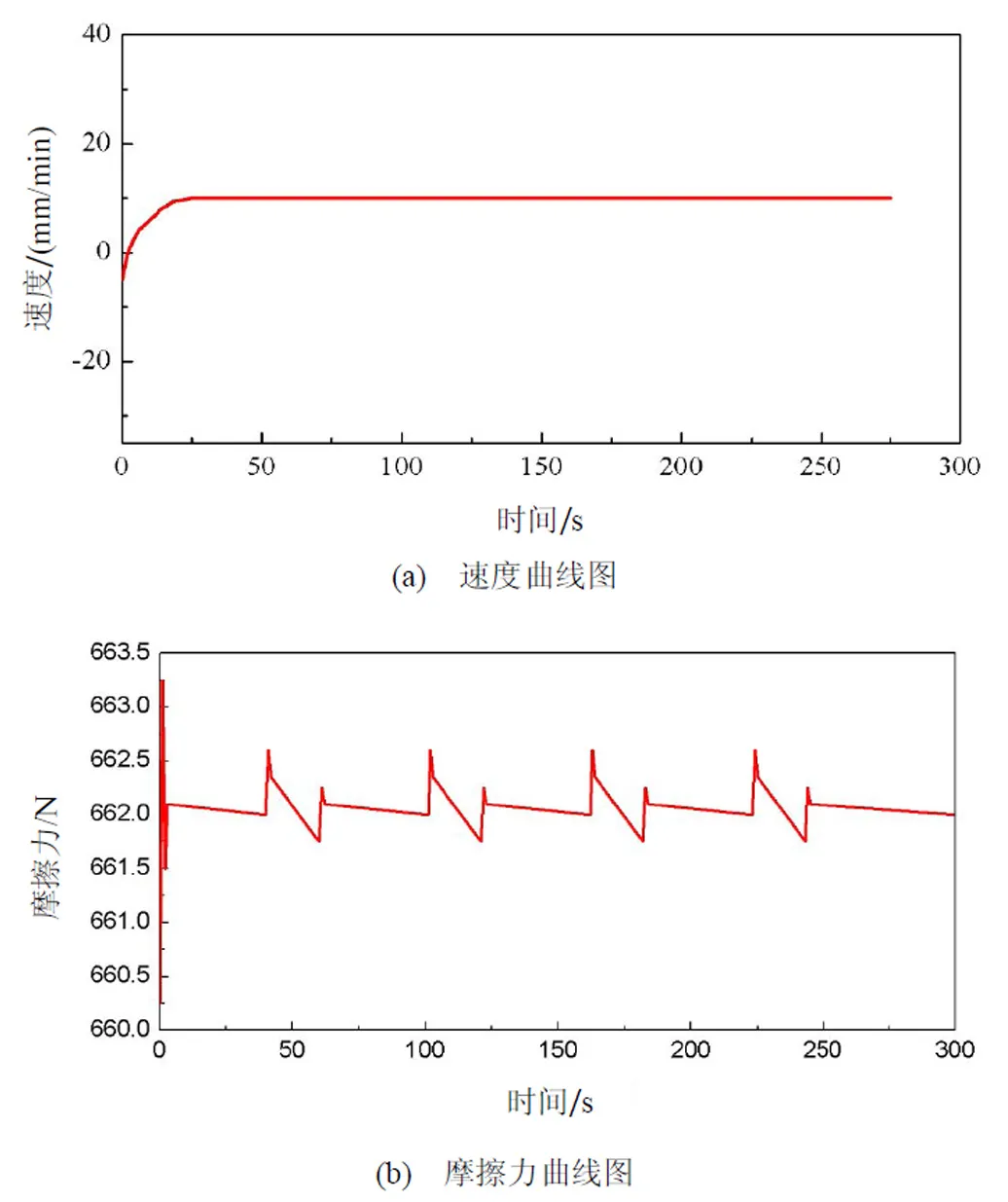
圖12 仿真結(jié)果
由圖12(a)可以看出,機器人在運行過程中較平穩(wěn),速度基本保持穩(wěn)定;從圖12(b)可以看出,靜摩擦力基本與系統(tǒng)重力一致(爬壁機器人系統(tǒng)重量約為 660 N),在爬壁機器人運行開始和結(jié)束時有突變,但變化較小。
2.2 實測結(jié)果分析
對本文設(shè)計的履帶式爬壁機器人進(jìn)行實際測試,機器人無負(fù)載和搭載設(shè)備在壁面上進(jìn)行橫向和縱向移動測試,測試結(jié)果如圖13所示。
由圖13(a)和圖13(b)可以看出,爬壁機器人在實驗壁面上無論橫向還是縱向,均可以穩(wěn)定可靠運行。改進(jìn)后的爬壁機器人在連續(xù)行走過程中沒有出現(xiàn)抖動、打滑或從壁面上脫落的現(xiàn)象,也沒有發(fā)生履帶脫離、吸附磁鐵損壞的現(xiàn)象。
由圖13(c)和圖13(d)可以看出,在爬壁機器人上安裝1套十字滑臺系統(tǒng),末端搭載工作設(shè)備,設(shè)備總重量為300 N。機器人搭載300 N重的設(shè)備在壁面上行走時,吸附穩(wěn)定可靠、運行平穩(wěn)。
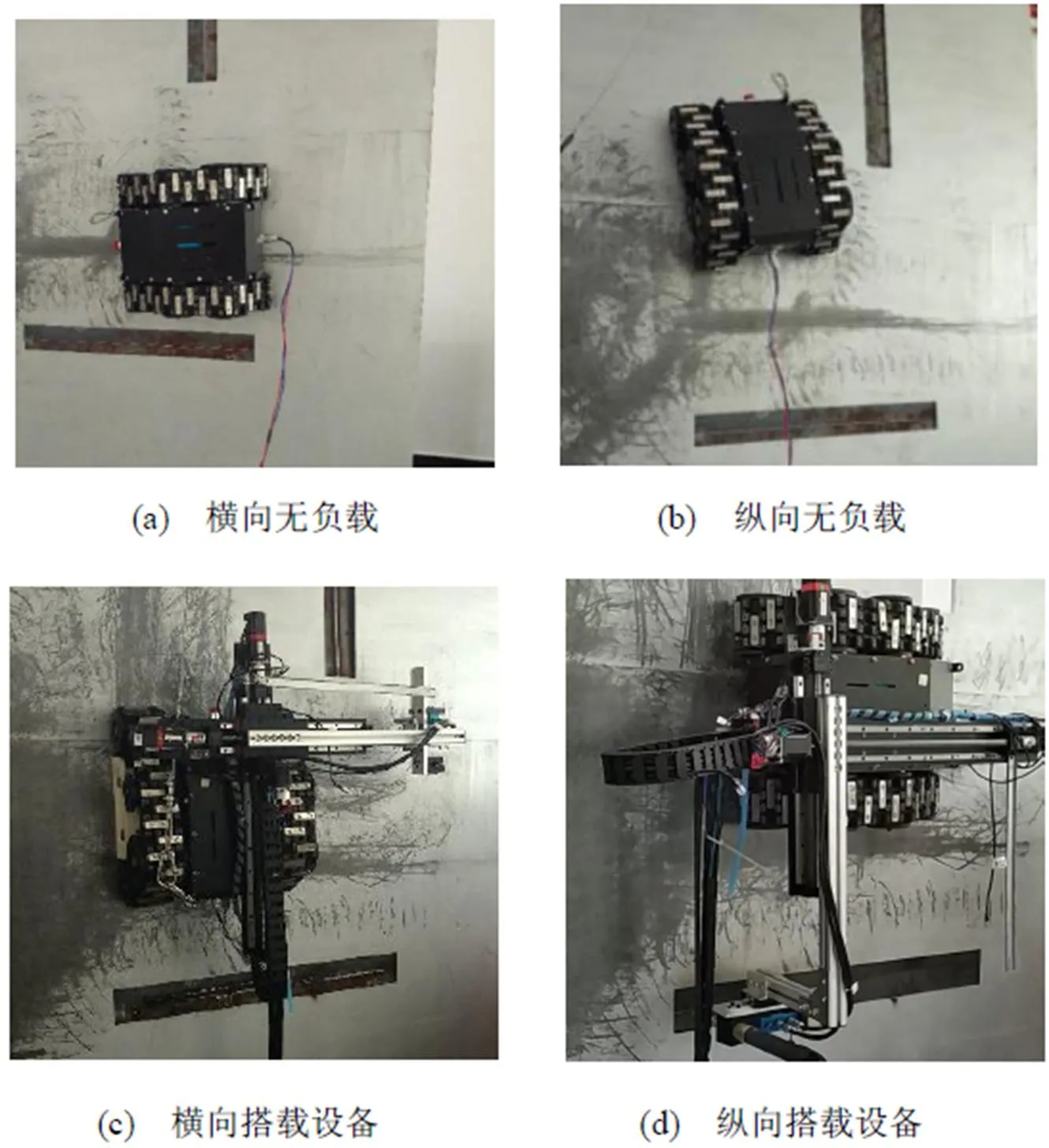
圖13 測試結(jié)果
3 結(jié)論
本文針對現(xiàn)有的履帶式磁吸附爬壁機器人存在的問題,提出一種履帶式爬壁機器人優(yōu)化設(shè)計方案。
1)通過優(yōu)化機器人履帶結(jié)構(gòu),解決了履帶式機器人容易出現(xiàn)履帶脫離、吸附磁鐵容易碎裂的問題;
2)通過模擬及仿真,計算得到機器人穩(wěn)定可靠行走需要的磁吸附力;
3)經(jīng)仿真結(jié)果和樣機實驗測試驗證,優(yōu)化設(shè)計的爬壁機器人負(fù)載能力強、運行靈活性好,未來可以搭載多種設(shè)備完成工作。
[1] 付宜利,李志海.爬壁機器人的研究進(jìn)展[J].機械設(shè)計,2008, 25(4):1-4.
[2] 閆久江,趙西振,左干,等.爬壁機器人研究現(xiàn)狀與技術(shù)應(yīng)用分析[J].機械研究與應(yīng)用,2015,28(3):52-54,58.
[3] Jeong Jae Hoon, Lee Dong Heon, Kim Min, et al. The study of the electromagnetic robot with a four wheel drive and applied I-PID system[J]. Journal of Electrical Engineering and Technology, 2017,12(4): 1634-1640.
[4] 塔月月.輪式爬壁機器人磁吸附性能及磁力控制研究[D]. 哈爾濱:東北石油大學(xué), 2012.
[5] 胡紹杰,彭如恕,何凱,等.履帶式爬壁機器人磁吸附單元優(yōu)化設(shè)計與實驗研究[J].機械與電子,2018,36(1):69-74.
[6] 王瑞,高榮慧,翟華.三角履帶爬壁機器人越障動力學(xué)建模與仿真[J].機械設(shè)計與制造,2017(增刊):205-208.
[7] 熊雕,劉玉良.履帶式爬壁機器人受力分析與穩(wěn)定性仿真研究[J].機電工程,2015,32(7):929-932,937.
[8] 方毅.永磁吸附爬壁機器人設(shè)計及性能分析[D].武漢:武漢科技大學(xué),2015.
Optimization Design of Tracked Wall-Climbing Robot
Cao Licao Liu Xiaoguang Jiang Xiaoming Zhou Yong
(Guangdong Institute of Intelligent Manufacturing, Guangdong Key Laboratory of Modern Control Technology)
At present, tracked wall-climbing robots are prone to problems such as track shedding, magnet damage, and unstable adsorption in the process of performing tasks. This situation easily causes the robot to fall from the work area. In view of the above problems, this paper has set up a wall-climbing robot by optimizing the track structure, improving the transmission device and improving the structure of the robot. Based on the simulation results and the prototype test, the optimized wall-climbing robot has strong load capacity, good stability and good movement flexibility. In the future, it can carry various equipment to complete the task.
Wall Climbing Robot; Permanent Magnet Adsorption; Track
曹立超,男,1990年生,碩士研究生,主要研究方向:自動化智能裝備、爬壁機器人系統(tǒng)。E-mail: lzclc521@163.com
廣東省科技計劃項目(2016B090927008,2016A030310309 2017A050506036,2014B040404063);廣東省科學(xué)院能力建設(shè)專項(2017GDASCX-0015,2016GDASRC-0106,2017GDASCX-0848)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50