雜波背景下基于概率假設密度的輔助粒子濾波檢測前跟蹤改進算法
2019-07-06 06:12:26裴家正董云龍陳小龍
雷達學報 2019年3期
裴家正 黃 勇 董云龍 何 友 陳小龍
(海軍航空大學 煙臺 264001)
1 引言
針對傳統的先檢測后跟蹤(Detect-Before-Track, DBT)方法在對低信雜(噪)比(一般小于10 dB)目標檢測造成的目標信息損失問題[1,2],檢測前跟蹤(Track-Before-Detect, TBD)技術是一種良好的應對策略。TBD是一種雷達多幀信號積累技術,介于信號處理和數據處理之間,不嚴格設定檢測與跟蹤之間的界限,直接使用原始量測信號,在檢測前引入跟蹤濾波思想,建立跟蹤模型對目標實施跟蹤維持,挖掘目標運動信息來輔助檢測[3—5]。由于充分利用了原始數據信息,TBD技術對實際雷達系統的性能有一定程度的提升[6—8]。
有限集統計學(FInite Set STatistics,FISST)方法將多目標狀態集合和量測集合建模元素數目可變的隨機有限集(Random Finite Set,RFS),利用最優貝葉斯濾波避免數據關聯的不確定,實現檢測不確定和雜波干擾背景下的多目標估計。但由于多目標狀態空間和量測空間是無限維的,最優多目標貝葉斯濾波器在實際中難以應用,Mahler[9]計算RFS中多目標后驗概率密度的1階矩,提出概率假設密度(Probability Hypothesis Density,PHD)濾波有效降低最優多目標貝葉斯濾波的運算量。目前,兩種PHD的收斂形式應用較為廣泛,分別是高斯混合PHD(Gaussian Mixture-PHD,GM-PHD)[10]和序貫蒙特卡洛PHD(Sequential Monte Carlo-PHD, SMC-PHD)[11,12],后者也稱為粒子濾波PHD(Particle Filter, PF-PHD)。PFPHD-TBD算法以非歸一化粒子權重之和進行目標數目估計,不需要目標數目的先驗信息,并且新生粒子的采樣數量在算法執行前便已確定,不存在概率轉移矩陣的設置問題,不存在多目標關聯和配對問題,相比于GM-PHD-TBD更適合處理雷達信號中的非線性非高斯問題[13,14]。
但目前將PHD理論運用在TBD領域尚存在諸多不足之處[15],在多目標檢測與跟蹤問題中,目標狀態的維數是隨著目標數目線性增長的,在聯合采樣中會造成維數災難,而且在非線性非高斯條件下,難以直接得到高維集合積分的解析解,因此本文采用粒子濾波的實現方法。為實現多目標檢測前跟蹤,粒子數目必須足夠大,才能解決高維度的聯合采樣問題[16],但過多粒子又會使得計算負擔加重。為解決上述問題,本文選擇引入兩層粒子的概念,將平行分割理論(Parallel Partition, PP)與輔助粒子濾波(Auxiliary Particle Filter, APF)結合,在PHD濾波的序貫蒙特卡洛實現方法基礎上進行改進,提出一種基于平行分割理論的輔助粒子濾波概率假設密度檢測前跟蹤算法(APP-PF-PHD-TBD)。本算法利用平行分割理論,避免聯合采樣時的維數災難;利用APF的輔助變量對第2層粒子標記,對當前目標進行狀態預測時,結合與當前目標相鄰近目標的狀態似然,得到目標的預測似然函數;最后利用兩層粒子的更新迭代,可以實現在粒子數較少或是目標較多的情況下對密集多目標狀態的準確估計。仿真結果和海雜波數據實驗表明,APP-PF-PHDTBD算法相較PF-PHD-TBD具有更好的目標數目和狀態估計效果,在目標密集情況下優勢更為明顯。
2 目標系統狀態模型和量測模型
2.1 系統狀態模型

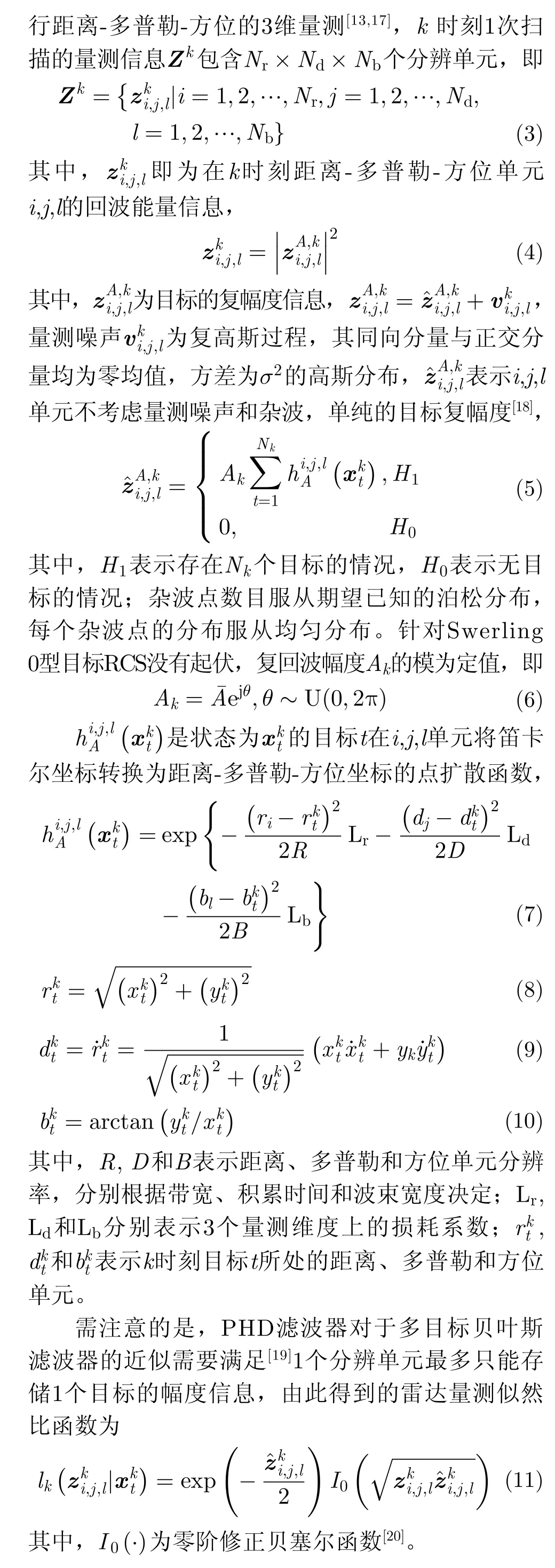
2.2 雷達傳感器TBD量測模型
雷達傳感器TBD量測模型需要對回波信號進
3 APP-PF-PHD-TBD算法
針對非線性濾波問題,PHD的解析解難以得到,PHD-TBD兩種實現方式中粒子實現方式PF-PHDTBD應用更為廣泛。在多目標檢測前跟蹤問題中,目標狀態的維數隨著目標數量線性增長[16],但為達到理想跟蹤效果,粒子必須足夠多才足以解決高維度的聯合采樣問題,但粒子數目增大會帶來不可避免的計算負擔。為解決計算量與估計精度之間的矛盾,本文將粒子平行分割理論應用于PF-PHD-TBD以減弱粒子濾波中維數災難所帶來的影響。
3.1 粒子平行分割理論
后驗獨立假設[21](posterior independence assumption)假定目標的后驗概率相互獨立,可以在濾波迭代的下一步先驗估計中減弱維數災難的影響。獨立分割[22](Independent Partition, IP)以及平行分割[23]的實例都有效證明了該觀點。但不同的是,PP方法在采樣過程中結合周圍目標進行估計,因此在目標移動緊密的情況下性能優于IP方法。

3.2 平行分割輔助粒子濾波APP-PF
輔助粒子濾波旨在借助輔助變量,可以更加準確地考慮量測,模擬出最優重要性采樣的采樣過程[25]。但在目標數增加時,由于APF的采樣過程是在整個狀態空間聯合采樣以至于會受到維數災難的影響,從而導致性能降低[26]。而APP-PF將粒子平行分割和輔助粒子濾波相結合,通過平行分割理論,可以減弱維數災難對濾波性能的影響。

3.3 APP-PF-PHD-TBD的算法實現
APP-PF-PHD-TBD算法與現有PF-PHD-TBD的不同之處在于預測和更新過程,其具體實現為:
(1) 初始化。用一定數量的粒子根據目標的初始建議密度進行采樣,

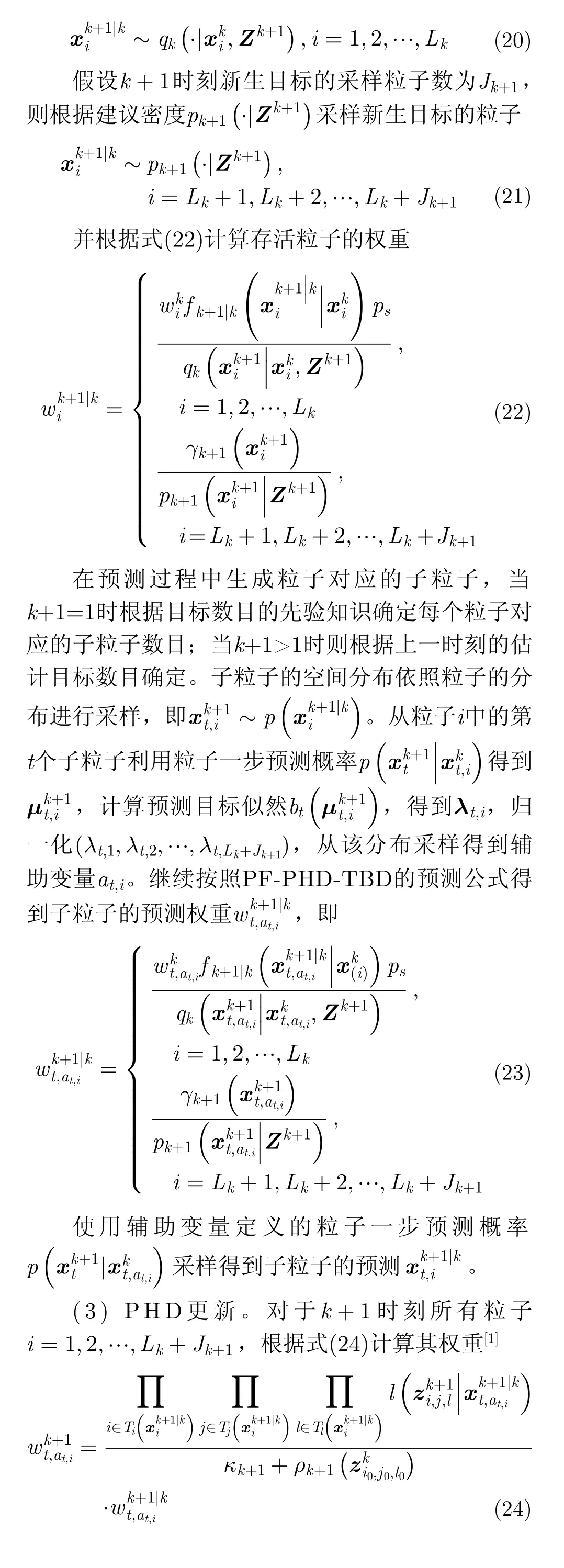

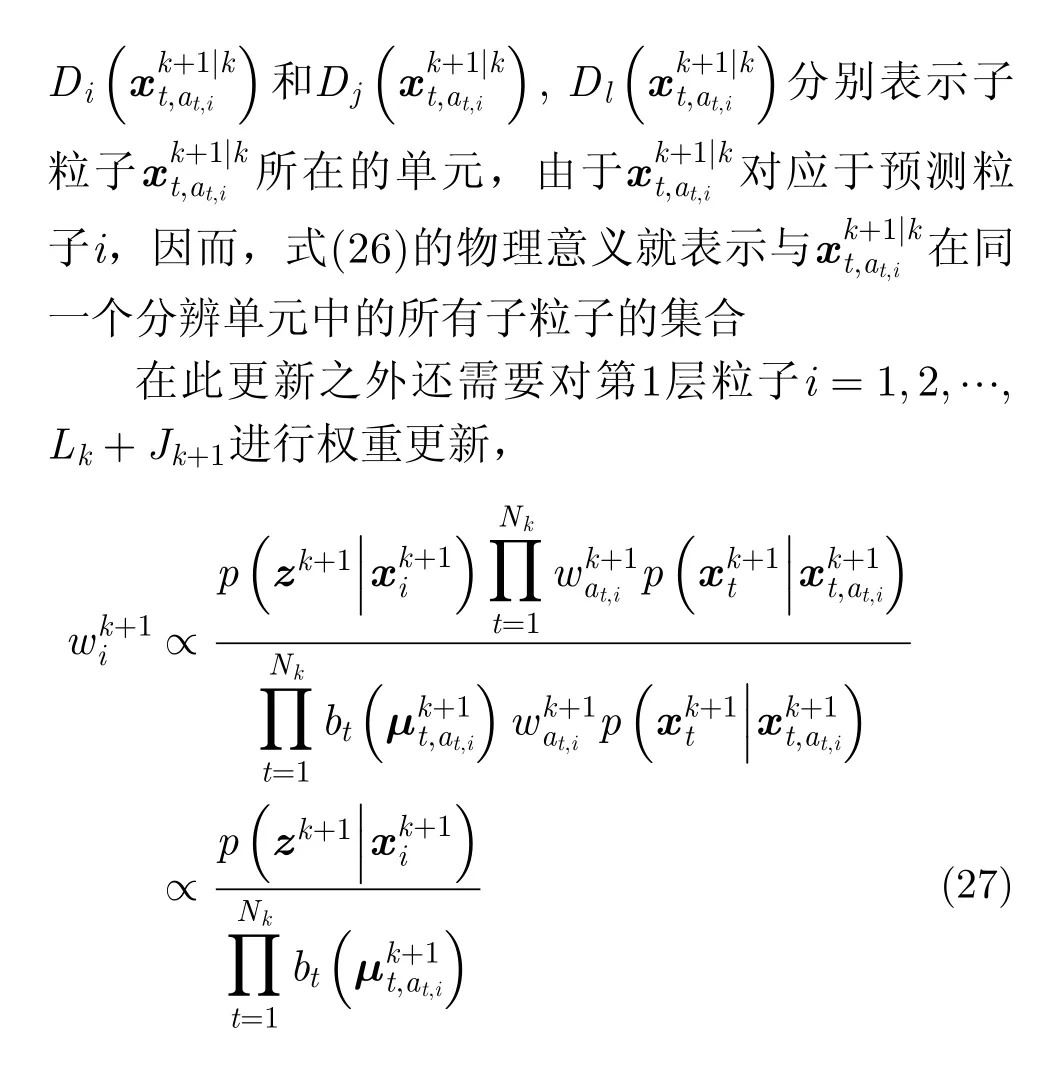
另外對k+1時刻高似然比子粒子進行選擇,令子粒子在k+1時刻根據似然比對目標的索引t相互交叉替換,之后繼續將k+1時刻的子粒子組合成為k+1時刻的粒子。此時的粒子是經由子粒子權重進行交叉選擇,合并得到的結果。
(4) 重采樣與狀態提取。為避免粒子權重退化,首先進行粒子重采樣刪除小權重,復制大權重。PHD在測量區域內的積分即為該區域內期望的目標數目M(k)。就粒子濾波實現而言,目標數估計為重采樣之后所有粒子的權重之和。

PHD函數中,目標狀態的估計值即為峰值點所在位置,就是粒子通過聚類得到聚類中心的位置。
4 仿真分析
4.1 仿真條件說明
本節將給出雜波背景下多目標TBD的應用仿真實例,仿真設置40個雷達傳感器掃描周期,產生40幀仿真數據,一共100次蒙特卡洛實驗取統計均值。掃描間隔T=1 s,目標運動近似為線性運動,運動方程同式(1)。假設雷達的測量區域設置為[0,2000 m]×[0,2000 m],設置雷達傳感器位于原點,距離分辨率R=15 m,多普勒分辨率D=1 m/s,方位分辨率B=1°。為論證所提算法的穩定性,本文采用兩組仿真實驗對比,另外應用到實際海雜波背景下的多目標運動場景,3組實驗仿真場景各有區別,最后通過對比總結算法性能。
仿真中參數設置為:目標存活概率Ps=0.99,新生概率pb=0.01,雷達的檢測概率Pd=0.98;目標運動和強度過程噪聲的功率譜密度q1=0.001,q2=0.01;每一個存活目標分配得到的粒子數為L1=500,新生目標粒子數J1=500,粒子總數為3000,為對比粒子數較少情況下的性能,另外設置每一個存活目標分配得到的粒子數L2=300,新生目標粒子數J2=300,粒子總數為1800;信雜(噪)比SNR=10lgP/2σ2,可依據目標功率和信雜(噪)比推算背景功率協方差 σ2。雜波是一個泊松隨機有限集,雜波點數為20,雜波密度為 λc=5×10-5m-2。粒子強度服從均勻分布,設定在15~25之間。整個仿真場景不考慮衍生目標情況。
4.2 仿真結果與分析
因為量測模型經過由笛卡爾坐標系到距離-多普勒-方位的轉換,就實現方式而言高斯混合形式不及粒子濾波形式的濾波性能,因此本文仿真主要討論粒子濾波實現,仿真過程利用PF-PHD-TBD,APP-PF-PHD-TBD方法在相同的仿真場景9 dB,8 dB, 6 dB的信雜(噪)比環境下依次試驗。仿真實驗算法性能評估指標采用最優子模式分配(Optional SubPattern Assignment, OSPA)[27]距離作為目標狀態估計精度的評價標準,選取OSPA參數截斷距離c=40 m ,距離參數p=2。
實驗1 多目標仿真場景(CV模型,無目標交叉)檢測性能對比。
仿真首先在較為一般的場景下進行,假設目標之間航跡沒有交叉,且目標的運動模型符合勻速模型,多目標的初始位置設置如表1所示,一共經過100次蒙特卡洛仿真,得到兩種算法的性能對比。
在圖1至圖3中子圖(a), (b)和子圖(c), (d)分別代表L1=J1=500和L2=J2=300的情況。由圖1—圖3可見 ,在相同的仿真條件下,APP-PF-PHDTBD算法與PF-PHD-TBD算法相比有著近似的目標數目估計性能,且性能都較為良好,作為誤差評判的OSPA距離也較為接近。需注意的是,在單個目標分配的粒子數減少時,APP-PF-PHD-TBD算法無論是在估計目標數目還是目標估計位置精度,性能相比于PF-PHD-TBD更好。
實驗2 多目標仿真場景(CT模型,存在目標航跡交叉)檢測性能對比。
仿真假設鄰近多目標之間航跡相互交叉,且目標的運動模型符合協同轉彎模型,實驗中多目標的運動狀態如表2所示,同樣經過100次蒙特卡洛仿真得到兩種算法的性能對比。
在圖4—圖6中子圖(a), (b)和子圖(c), (d)依然分別代表L1=J1=500和L2=J2=300的情況。由圖4—圖6得,目標密集時APP-PF-PHD-TBD算法明顯擁有比PF-PHD-TBD算法更加優越的目標數目估計性能。信雜(噪)比較低以及粒子數目較少,算法性能都會下降,但APP-PF-PHD-TBD依然優于傳統PHD-TBD。PF-PHD-TBD沒有考慮鄰近目標的重要性密度,因此其估計性能隨著目標交叉而急劇下降,另外PF-PHD-TBD在多目標狀態空間的聯合采樣會受到維數災難的影響,相較之下APP-PF-PHD-TBD因為后驗獨立采樣不會受到維數災難的影響,同時考慮了相互鄰近的目標狀態,不會受到鄰近目標的影響。

表1 實驗1中目標運動狀態Tab.1 The state of the targets in Exp.1

圖1 實驗1 9 dB時兩種方法的目標數目檢測性能對比Fig.1 Exp.1 the performance of the two method in 9 dB

圖2 實驗1 8 dB時兩種方法的目標數目檢測性能對比Fig.2 Exp.1 the performance of the two method in 8 dB

圖3 實驗1 6 dB時兩種方法的目標數目檢測性能對比Fig.3 Exp.1 the performance of the two method in 6 dB

表2 實驗2中目標運動狀態Tab.2 The state of the targets in Exp.2

圖4 實驗2 9 dB時兩種方法的目標數目檢測性能對比Fig.4 Exp.2 the performance of the two method in 9 dB
在圖4—圖6的子圖(b)和子圖(d)中,新生目標在既定時刻出現,在對應時刻,算法對目標數目估計有延遲,需要多幀跟蹤估計才能檢測到新生目標。隨著多幀累積處理,目標數估計趨于穩定。由于傳統PF-PHD-TBD此時目標數目已經估計不準,造成OSPA距離明顯較高且接近截斷距離。通過對比可得所提算法在粒子數較少的情況下相較傳統PHD-TBD算法更加穩定。從而驗證了粒子分割理論在處理粒子數目較少情況下的優越性。

圖6 實驗2 6 dB時兩種方法的目標數目檢測性能對比Fig.6 Exp.2 the performance of the two method in 6 dB
實驗3 實際海雜波背景檢測性能對比
本部分實驗選取實際導航雷達采集的實際海雜波背景數據,進行多目標運動場景下的檢測性能對比。雷達實際采樣率為60 MHz,每圈掃描包含的脈沖數為3000。導航雷達設置每5秒掃描1圈,掃描1圈得到1幀數據,一共40幀數據。我們截取雷達掃描信息的1/4數據作為海雜波實驗數據,在雷達海雜波背景數據下添加目標運動信息,運動服從CV模型,目標信息如表3所示,設置信雜(噪)比為9 dB,在第20幀得到的數據為圖7所示。
在TBD檢測之前先設置第1級門限Th=1200控制數據量,使檢測概率Pd保持0.98并完成后續檢測,經過100次蒙特卡洛仿真圖8和圖9所示為兩種算法的跟蹤效果對比。
海雜波背景數據量較大,因此在本實驗中每個存活目標和新生目標的粒子個數均為1000。結果中可以看出信雜(噪)比為9 dB時,在實際海雜波背景的數據下,APP-PF-PHD-TBD和PF-PHD-TBD兩種方法對目標都能實現較為準確的估計,但在目標數目變化時的估計都出現了延遲,相較之下APP-PF方法的目標數目檢測性能更為平穩,未出現目標數目波動的情況,而且在圖9中APP-PF方法的位置誤差相對較小。

表3 實驗3中目標運動狀態Tab.3 The state of the targets in Exp.3

圖7 加入目標后雷達第20幀掃描的數據信息Fig.7 The data of the 20th scan after adding the targets
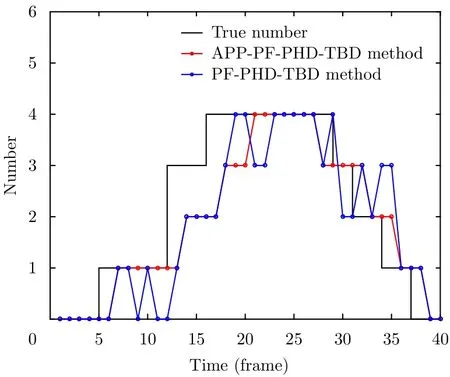
圖8 實驗3兩種方法目標檢測數目對比Fig.8 The comparison of the detected targets number in Exp.3

圖9 實驗3兩種方法位置估計精度對比Fig.9 The comparison of the location accuracy in Exp. 3
綜上所述,理論分析PHD-TBD的算法復雜度為O(mn),其中m為量測數目,n為目標數目。APP-PFPHD-TBD相比于PF-PHD-TBD引入了與目標數目對應的第2層粒子,理論上算法復雜度會更高。實際仿真中,二者進行100次蒙特卡洛實驗,統計得到3項實驗1次運行的平均時間,如表4—表6所示。
經上述綜合對比,發現由于APP-PF方法在算法過程中進行了兩層粒子的運算過程,在上述3項實驗中,運算效率略低于PF-PHD-TBD,這一點在實驗1中表現明顯;但在實驗2中,由于PFPHD-TBD方法在目標航跡交叉存在時無法精確檢測目標個數,造成估計不準的問題,運算時間與實驗1中相比還要短,其實是算法缺陷造成的,反觀APP-PF-PHD-TBD方法在實驗2多目標鄰近,航跡相互交叉的情況下,雖然以運算效率為代價,但對目標的估計結果更具有優勢;實驗3采用海雜波背景數據的仿真,數據量較大,因此在時間上兩種方法都有延長。APP-PF方法雖然在效率上較為欠缺,但是算法的穩定性和魯棒性更強,因此在算法時間允許的情況下,APP-PF-PHD-TBD表現更加優異。

表4 實驗1算法蒙特卡洛實驗平均運行時間(s)Tab.4 The mean running time of per Monte Carlo experiment in Exp. 1 (s)

表5 實驗2算法蒙特卡洛實驗平均運行時間(s)Tab.5 The mean running time of per Monte Carlo experiment in Exp. 2 (s)

表6 實驗3算法蒙特卡洛實驗平均運行時間(s)Tab.6 The mean running time of per Monte Carlo experiment in Exp. 3 (s)
5 結束語
本文基于序貫蒙特卡洛概率假設密度濾波,結合粒子分割算法,應用于檢測前跟蹤過程,主要針對在粒子數目較少時,密集多目標在雜波背景下的目標檢測問題,給出算法的系統模型以及測量模型,引入平行分割思想,生成第2層粒子,并闡述算法的具體實施過程。仿真以及海雜波背景實驗表明,APP-PF-PHD-TBD算法在目標密集區域的檢測效果優于PF-PHD-TBD;在相同信雜(噪)比條件但粒子數目較少的情況下,既能避免維數災難的影響也能保持較好的目標估計優勢。但缺點是不可避免地增加了運算負擔,效率較傳統算法低;同時,平行分割算法目前假設目標總數先驗知識已知,解決目標總數先驗未知情況也將是下一步的研究重點。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55