車輛進出管理的實驗室模擬
2019-07-11 06:18:30王玉清
延安大學學報(自然科學版) 2019年2期
關鍵詞:方向
王玉清
(延安大學物理與電子信息學院,陜西延安716000)
近年來,隨著經濟社會的發展,機動車輛數量持續快速增加,堵車現象已經成為司空見慣的事情[1-4],為了緩解這方面壓力,實施有效的交通管理監控,多數單位的大門口都安裝了車輛探測器。但是在車輛探測器實際探測時,當個別車輛經過時,由于車輛距離探測器較遠,出現探測器無反應的情況,這時,車輛必須往后倒退,然后前進,當車輛重新靠近探測器時,才有可能識別。個別駕駛員不能理解,為什么要這樣?到底是怎么回事?實際上,這是由于不懂車輛探測器的原理造成的。地球磁場在幾公里范圍內可視為均勻分布,當較大的鐵磁物質如車輛穿過時會對周圍磁場產生擾動,探測器便可根據此擾動探測車輛的運動狀態[1-15]。這里,我們利用各向異性磁阻傳感器、廢舊的磁電式電流表在實驗室模擬車輛的進出管理,普及車輛進出管理的知識。
1 模擬原理
各向異性磁阻傳感器AMR由沉積在硅片上的坡莫合金薄膜形成電阻。沉積時外加磁場,形成易磁化軸方向。鐵磁材料的電阻和電流與磁化方向的夾角有關,電流與磁化方向平行時電阻Rmax最大,電流與磁化方向垂直時電阻Rmin最小,電流與磁化方向成θ角時,電阻可表示為:
R=Rmin+(Rmax-Rmin)cos2θ。
在磁阻傳感器中,為了消除溫度等外界因素對輸出的影響,由4個相同的磁阻元件構成惠斯通電橋,結構如圖1所示。圖1中,易磁化軸方向與電流方向的夾角為45°。理論分析與實踐表明,采用45°偏置磁場,當沿與易磁化軸垂直的方向施加外磁場,且外磁場強度不太大時,電橋輸出與外加磁場強度成線性關系。無外加磁場或外加磁場方向與易磁化軸方向平行時,磁化方向即易磁化軸方向,電橋的4個橋臂電阻阻值相同,輸出為零。當在磁敏感方向施加如圖1所示方向的磁場時,合成磁化方向將在易磁化方向的基礎上逆時針旋轉。結果使左上和右下橋臂電流與磁化方向夾角增大,電阻減小△R;右上與左下橋臂電流與磁化方向的夾角減小,電阻增大△R。通過對電橋的分析可知,此時輸出電壓可表示為:
U=Vb×△R/R。
式中Vb為電橋工作電壓,R為橋臂電阻,△R/R為磁阻阻值的相對變化率,與外加磁場強度成正比,故AMR磁阻傳感器輸出電壓與磁場強度成正比,可利用磁阻傳感器輸出電壓的變化來探測電流表的運動狀態,從而完成車輛進出的實驗室模擬。
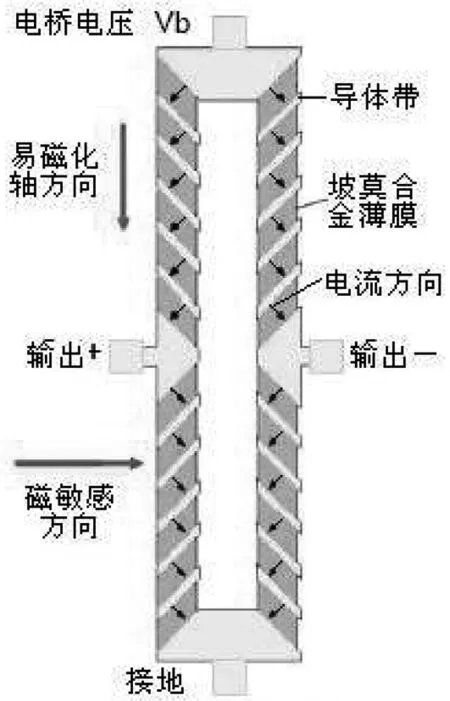
圖1 磁阻電橋
商品磁阻傳感器已制成集成電路,除圖1所示的電源輸入端和信號輸出端外,還有復位/反向置位端和補償端兩對功能性輸入端口,以確保磁阻傳感器的正常工作。
2 模擬裝置
模擬裝置由四川世紀中科光電技術有限公司研制的ZKY-CC型各向異性磁阻傳感器和磁場測量儀、廢舊的磁電式電流表組成,如圖2所示。
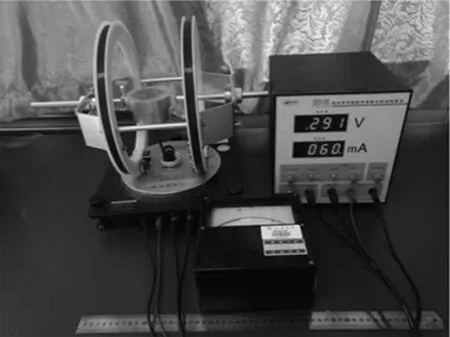
圖2 模擬裝置圖
3 模擬方法
3.1 連接實驗儀與電源,開機預熱20 min。
3.2 將磁阻傳感器位置調至亥姆霍茲線圈中心,傳感器磁敏感方向與亥姆霍茲線圈軸線一致。
3.3 將K1、K2同時通電,調節亥姆霍茲線圈電流為零,按復位鍵,調節補償電流,使傳感器輸出為零。調節亥姆霍茲線圈電流至300 mA,調節放大器校準旋鈕,使輸出電壓為1.500 V。
3.4 將電流表沿與磁敏感方向平行、與磁敏感方向一致的x軸正方向移動,記錄電流表距離磁阻傳感器的位移x及相應輸出電壓U數據,利用數據作U-x曲線。
3.5 將電流表沿與磁敏感方向平行、與磁敏感方向相反的x軸負方向移動,記錄電流表距離磁阻傳感器的位移x′及相應輸出電壓U數據,利用數據作U-x′曲線。
3.6 將電流表沿與磁敏感方向垂直、與磁敏感方向在一個水平面內的y軸正方向移動,記錄電流表距離磁阻傳感器的位移y及相應輸出電壓U數據,利用數據作U-y曲線。
3.7 將電流表沿與磁敏感方向垂直、與磁敏感方向在一個水平面內y軸負方向移動,記錄電流表距離磁阻傳感器的位移y′及相應輸出電壓U數據,利用數據作U-y′曲線。
3.8 將電流表沿與x軸、y軸垂直的方向z軸正方向移動,記錄電流表距離磁阻傳感器的位移z及相應輸出電壓U數據,利用數據作U-z曲線。
3.9 將電流表沿與x軸、y軸垂直的方向z軸負方向移動,記錄電流表距離磁阻傳感器的位移z′及相應輸出電壓U數據,利用數據作U-z′曲線。
4 模擬數據與結果
4.1 電流表沿與磁敏感方向平行、與磁敏感方向一致的x軸正方向移動的實驗數據,見表1。
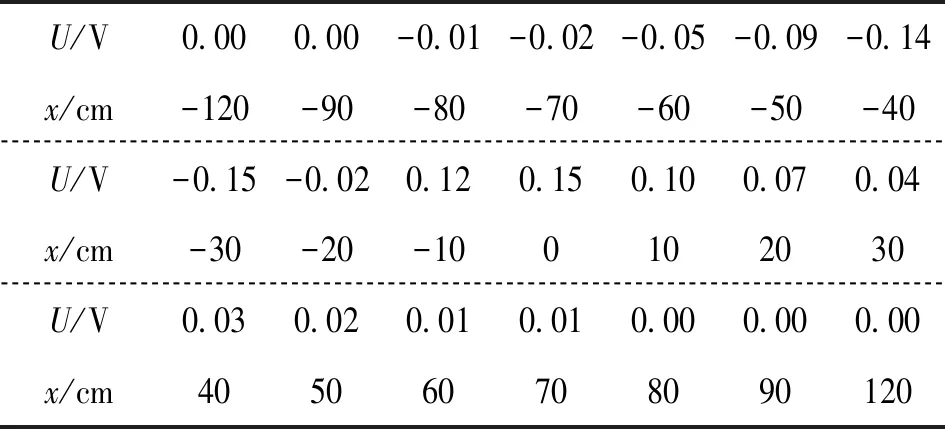
表1 電流表沿x軸正向移動的實驗數據
鑒于篇幅,此處及后文中電流表沿x軸負方向、y軸負方向、z軸負方向移動的實驗數據不再另設表格列出。
利用表1數據作圖3(a)。為了與正向對比,利用電流表沿x軸負方向移動的實驗數據作圖3(b)。
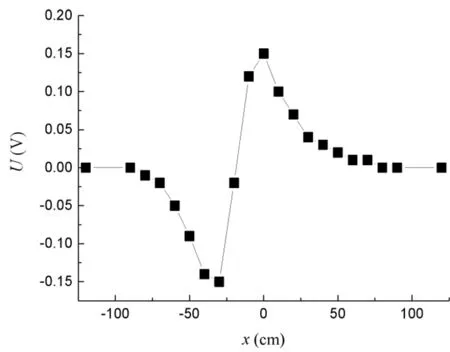
圖3(a) 電流表沿x軸正向移動的曲線
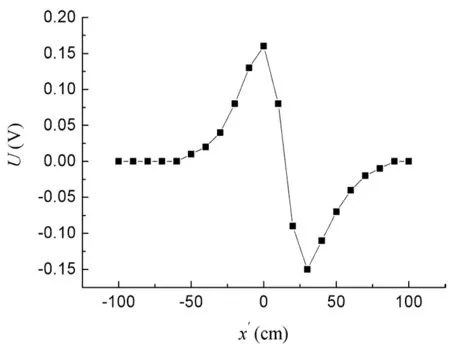
圖3(b) 電流表沿x軸負向移動的曲線
從圖3(a)中可以看出,當電流表沿傳感器的x軸正方向移動時,如果電流表與傳感器之間距離d較大(d>80 cm),小車的存在對傳感器輸出影響不大。當電流表靠近傳感器(d<80 cm)時,傳感器輸出變化明顯。傳感器輸出先是減小,在位移約為-30 cm處達到最小值,在無電流表干擾時的輸出值基礎上減小0.15 V;隨后快速增大,在位移約為-20 cm處增大到無電流干擾時的輸出水平后繼續增大,一直增大到在位移約0 cm處達到最大值,此后又減小,并在距離d>80 cm時恢復到無小車干擾時的輸出水平。
從圖3(b)中可以看出,當電流表沿x軸負方向移動,如果電流表與傳感器之間距離d較大(d>80 cm),電流表的存在對傳感器輸出影響不大。當電流表移動逐漸靠近傳感器時,傳感器輸出先是減小,在位移約為30 cm處達到最小值,在無電流表干擾時的輸出值基礎上減小0.15 V;隨后快速增大,在位移約為15 cm處增大到無電流干擾時的輸出水平后繼續增大,一直增大到在位移約0 cm處達到最大值,此后又減小,并在距離d>80 cm時恢復到無小車干擾時的輸出水平。
結果表明,電流表沿與磁敏感方向平行、與磁敏感方向一致的x軸正、負方向移動時,傳感器的輸出變化規律不同。電流表只在距離傳感器距離d<80 cm內,電流表的存在對傳感器輸出有影響。否則,電流表的存在對傳感器輸出無影響。
4.2 電流表沿與磁敏感方向垂直、與磁敏感方向在一個水平面內的y軸正方向移動的實驗數據,見表2。
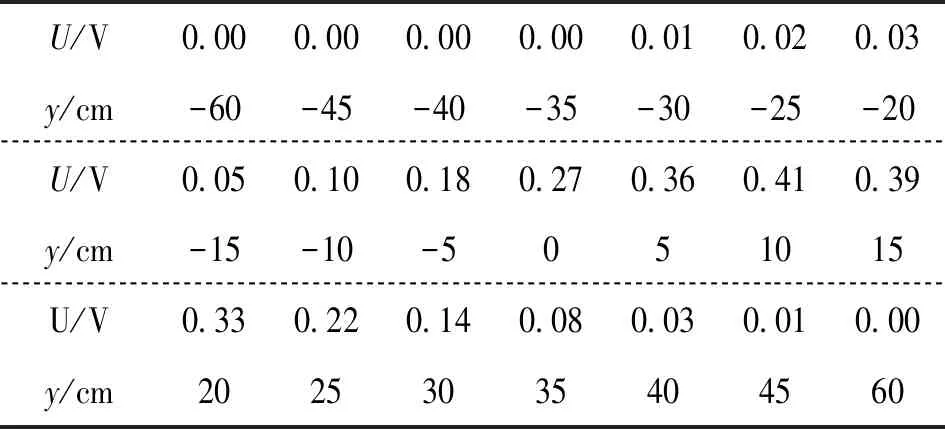
表2 電流表沿y軸正向的實驗數據
利用表2數據作圖4(a)。利用電流表沿y軸負向的實驗數據作圖4(b)。
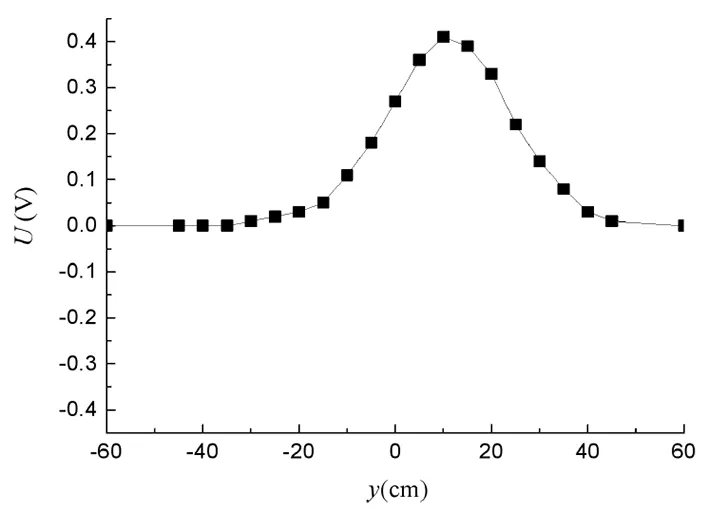
圖4(a) 電流表沿y軸正向移動的曲線
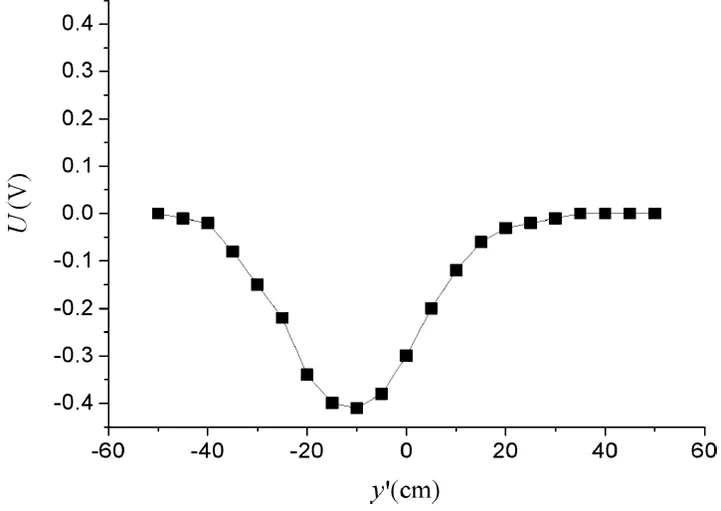
圖4(b) 電流表沿y軸負向移動的曲線
從圖4(a)中可以看出,電流表沿與磁敏感方向垂直、與磁敏感方向在一個水平面內的y軸正方向移動時,如果電流表與傳感器之間距離d較大(d>35 cm),電流表的存在對傳感器輸出影響不大。當電流表靠近傳感器,距離d<35 cm時,傳感器輸出變化明顯。當電流表移動逐漸靠近傳感器時,傳感器y輸出先是增大,在距離d約為10 cm處達到最大值,在無電流表干擾時的輸出值基礎上增大0.41 V;隨后快速減小,并在距離d約為60 cm時恢復到無小車干擾時的輸出水平。
從圖4(b)中可以看出,當電流表沿y軸負方向移動,如果電流表與傳感器之間距離d較大(d>35 cm),電流表的存在對傳感器輸出影響不大。當電流表移動逐漸靠近傳感器時,傳感器輸出先是減小,在距離d約為10 cm處達到最小值,在無電流表干擾時的輸出值基礎上減小0.41 V;隨后快速增大,在距離d約為35 cm時恢復到無小車干擾時的輸出水平。
結果表明,電流表沿與磁敏感方向垂直、與磁敏感方向在一個水平面內的y軸正、負方向移動時,傳感器的輸出變化規律不同,電流表只在距離傳感器d<35 cm內,電流表的存在對傳感器輸出有影響。否則,電流表的存在對傳感器輸出無影響。
4.3 電流表沿與x軸、y軸垂直的方向z軸正方向移動的實驗數據,見表3。
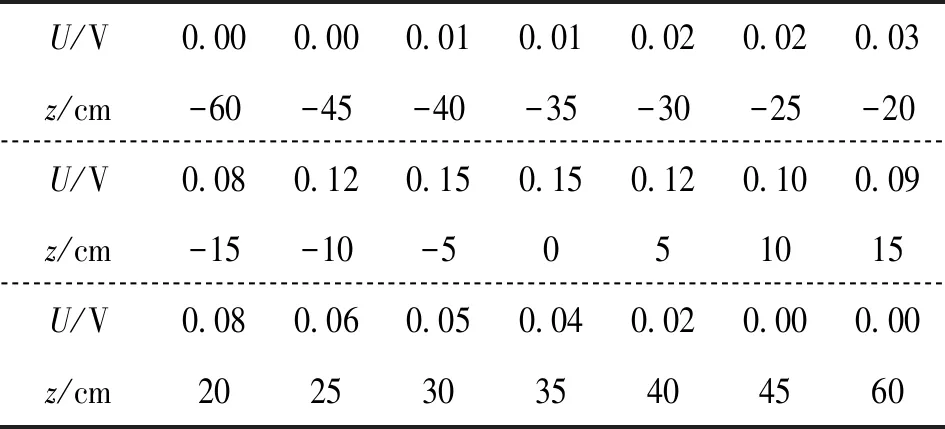
表3 電流表沿z軸正向的實驗數據
利用表3數據作圖5(a)。利用電流表沿z軸負向的實驗數據作圖5(b)。
從圖5(a)中可以看出,電流表沿與x軸、y軸垂直的方向z軸正方向移動時,如果電流表與傳感器之間距離d較大(d>40 cm),電流表的存在對傳感器輸出影響不大。當電流表移動逐漸靠近傳感器時,傳感器輸出增大,在距離d約為0 cm處達到最大值,在無電流表干擾時的輸出值基礎上增大0.15 V;隨后快速減小,并在距離d>45 cm時恢復到無小車干擾時的輸出水平。
從圖5(b)中可以看出,當電流表沿z軸負方向移動,如果電流表與傳感器之間距離d較大(d>40 cm),電流表的存在對傳感器輸出影響不大。當電流表移動逐漸靠近傳感器時,傳感器輸出減小,在位移約為0 cm處達到最小值,在無電流表干擾時的輸出值基礎上減小0.15 V;隨后快速增大,在距離d約為40 cm時恢復到無小車干擾時的輸出水平。
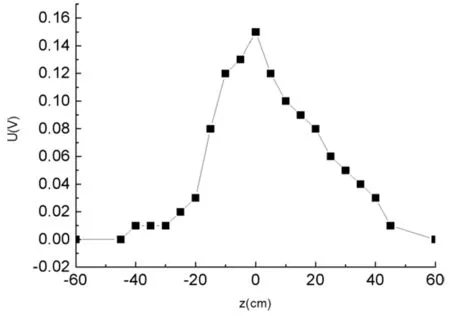
圖5(a) 電流表沿z軸正向移動的曲線
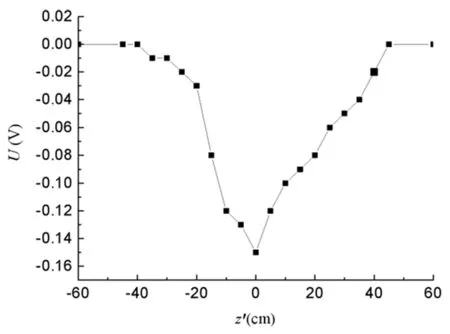
圖5(b) 電流表沿z軸負向移動的曲線
結果表明,電流表沿與x軸、y軸、z軸正、負方向移動時,傳感器的輸出變化規律不同,電流表只在距離傳感器一定范圍內時,電流表的存在對傳感器輸出有影響。否則,電流表的存在對傳感器輸出無影響。
5 結論
從實驗結果可以看出,電流表沿著不同的方向通過AMR傳感器時,傳感器輸出變化規律不同。多次實驗表明,電流表從不同方向通過傳感器時均能正確識別。但是,電流表不管從哪個方向沿傳感器移動,當距離超過一定的范圍時,傳感器都無反應。這就要求我們在車輛進出的地方安裝傳感器時,傳感器安裝的高低是有要求的。如果車輛距離傳感器較遠,車輛的存在對傳感器輸出無反應,車輛進出就不能識別。利用各向異性磁阻傳感器、廢舊的磁電式電流表,在實驗室模擬車輛的進出管理切實可行,達到普及車輛進出管理的探測知識。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50