基于PSD三角測(cè)距的車輛避障系統(tǒng)設(shè)計(jì)
2019-07-16 03:17:27陳龍彪諶雨章鄒鵬
電腦知識(shí)與技術(shù) 2019年14期
陳龍彪 諶雨章 鄒鵬

摘要:針對(duì)目前市面上出現(xiàn)的大部分新型智能避障系統(tǒng)結(jié)構(gòu)復(fù)雜、制造難度高、制造成本高等問題,本文自主設(shè)計(jì)了一套全新的車輛避障系統(tǒng)。該裝置通過使用PSD三角測(cè)距的方式來采集障礙物位置信息,并將其送入以AT89C52為數(shù)據(jù)采集與控制的模塊,最后在LCD屏幕上顯示障礙物信息,能夠?qū)崿F(xiàn)精準(zhǔn)探測(cè)障礙物位置,具有很高的應(yīng)用價(jià)值。
關(guān)鍵詞:PSD三角測(cè)距;車輛避障;障礙物
中圖分類號(hào):TP301 ? ? 文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1009-3044(2019)14-0205-02
Abstract: In view of the complex structure, high manufacturing difficulty and high manufacturing cost of most of the new intelligent obstacle avoidance systems currently on the market, this paper independently designed a new vehicle obstacle avoidance system. The device collects the obstacle position information by using PSD triangle ranging, and send it to the data acquisition and control module based on AT89C52. Finally the obstacle information will display on the LCD screen, which can accurately detect the position of the obstacle. And this system is very high Application value.
Key words: PSD triangle ranging; vehicle obstacle avoidance; obstacles
隨著人民生活水平的日益提高,人們對(duì)汽車這種交通工具的需求量越來越大,這也導(dǎo)致城市交通的負(fù)荷不斷增加,與此同時(shí),也引發(fā)了一系列行車安全問題【1~2】。許多駕駛員在行車過程中與其他車輛或者障礙物發(fā)生碰撞摩擦的原因,都是對(duì)其他車輛或者障礙物的位置判斷不夠準(zhǔn)確,如果司機(jī)能夠提前知道其他車輛或障礙物的方位以及距離,將會(huì)很大程度的減少甚至避免交通事故的發(fā)生。
1 系統(tǒng)設(shè)計(jì)
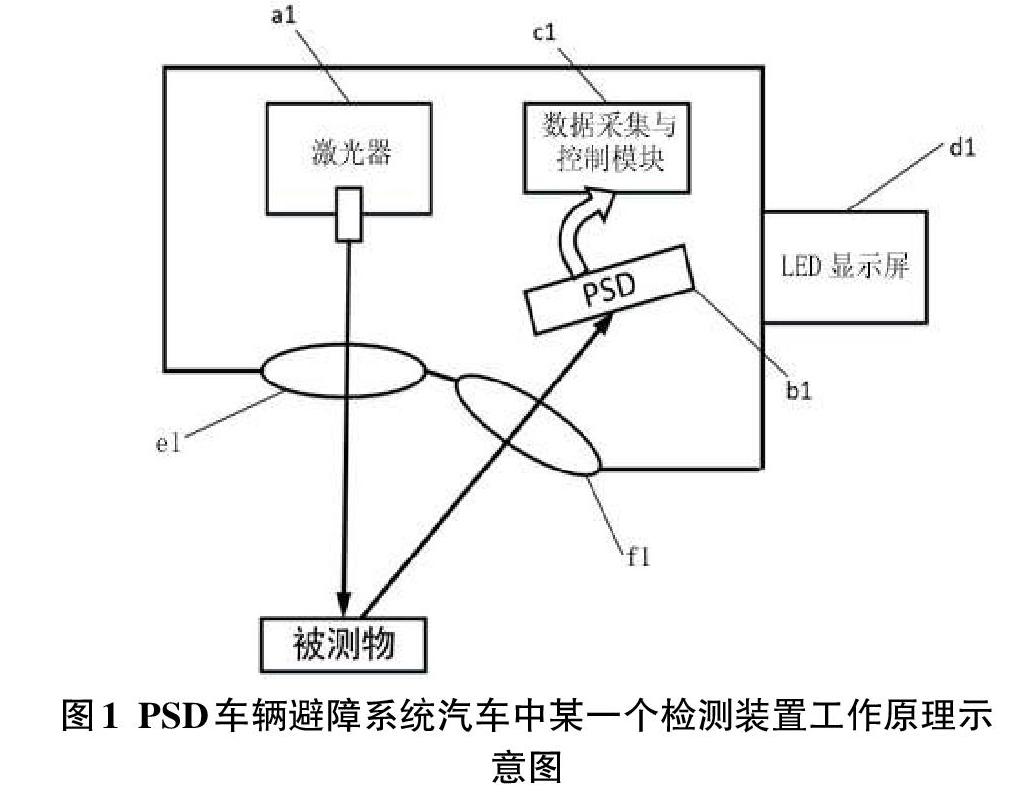
本系統(tǒng)由PSD探測(cè)模塊、信號(hào)放大和處理模塊、數(shù)據(jù)采集與控制模塊、AD轉(zhuǎn)換模塊以及顯示模塊五大模塊組成。激光器模塊a1發(fā)射的激光經(jīng)準(zhǔn)直透鏡準(zhǔn)直后,射到被測(cè)目標(biāo)上形成漫反射,反射的光斑作為傳感信號(hào),再通過接收透鏡會(huì)聚,在PSD模塊b1上形成光斑,被測(cè)目標(biāo)和傳感器之間的距離決定光斑的中心位置,而模塊b1 輸出的電信號(hào)準(zhǔn)確地反映了傳感器與被測(cè)目標(biāo)之間的距離信息。當(dāng)車周邊出現(xiàn)障礙物時(shí),被測(cè)目標(biāo)變成了障礙物,PSD 上所形成的光斑的中心位置也會(huì)因此而改變,根據(jù)光斑位置所發(fā)生的改變, 便能測(cè)出是否有障礙物。PSD模塊b1檢測(cè)到的信息將會(huì)傳入數(shù)據(jù)的采集與控制模塊c1,c1會(huì)經(jīng)過分析得到障礙物的準(zhǔn)確信息,PSD輸出電流信號(hào),該電流信號(hào)經(jīng)過電流電壓轉(zhuǎn)換電路,被轉(zhuǎn)換為合適的小電壓信號(hào),然后進(jìn)行放大處理,接著由單片機(jī)控制進(jìn)行AD轉(zhuǎn)換,最終的數(shù)據(jù)會(huì)通過單片機(jī)控制LCD顯示屏模塊d1來顯示,通過d1顯示屏便可讀取障礙物的距離方位值。具體的工作原理圖如圖1所示。
2 模塊工作原理
2.1 PSD探測(cè)模塊
該模塊由激光器、發(fā)射透鏡、接收透鏡以及PSD組成,激光器的中心軸線、PSD和接收透鏡的中心光軸三者位于同一平面,與PSD形成三角測(cè)距。
由于直射式激光三角測(cè)距法[3~6]在減小儀器體積方面優(yōu)于斜射式, 具體表現(xiàn)在直射式的激光器垂直于照射到被測(cè)物體,接收器接收到的多為散射和漫反射后的光線,其方法主要適用于被測(cè)物表面較為粗糙;有分辨率較低,探測(cè)器結(jié)構(gòu)小,測(cè)量范圍大,信噪比低的特點(diǎn)。而斜射式與直射式的入射方式不同,即入射光線與被測(cè)物表面成一定角度入射,接收器接收到的主要是經(jīng)過鏡面反射后的光線,其方法主要適用于被測(cè)物表面近似鏡面的物體。有分辨率高,探測(cè)器機(jī)構(gòu)體積大,測(cè)量范圍小的特點(diǎn)。對(duì)比可得,本系統(tǒng)采用直射式激光三角測(cè)距理論。
激光器通過發(fā)射透鏡將激光光束折射到障礙物表面,并會(huì)形成反射光束,將其作為傳感信號(hào),通過接收透鏡成像會(huì)聚在PSD上,再通過計(jì)算得到障礙物的距離信息,此方法最大的優(yōu)點(diǎn)就是PSD輸出只與光斑在PSD上的位置有關(guān),與接收的光強(qiáng)無關(guān);當(dāng)車四周無障礙物時(shí),激光直接入射向遠(yuǎn)方,探測(cè)儀接收不到反射光,顯示為無障礙物;當(dāng)車身四周出現(xiàn)障礙物時(shí),探測(cè)儀上的距離值將發(fā)生跳變,此時(shí)表示有障礙物,且通過8路PSD測(cè)距通道能精準(zhǔn)確定障礙物的方位及距離。PSD信號(hào)提取及處理電路如圖2所示:
2.2信號(hào)放大與處理模塊
本模塊的核心是一個(gè)電流電壓轉(zhuǎn)換電路,電流電壓轉(zhuǎn)換電路的主要作用是把PSD輸出的微弱電路信號(hào)轉(zhuǎn)換為電壓信號(hào)并濾波放大。
2.3數(shù)據(jù)采集與控制模塊
本模塊選用AT89C52作為MCU模塊,還包括AD公司生產(chǎn)的16位AD 7705,單片機(jī)的串行輸出口通過擴(kuò)展后與PC機(jī)連接,并按照AD7705的傳送時(shí)序圖按位接收和發(fā)送數(shù)據(jù),采集的數(shù)據(jù)信號(hào)經(jīng)過處理后被送入單片機(jī),在檢測(cè)障礙物前,需要先檢測(cè)并記錄下背景信號(hào),在軟件中將背景信號(hào)除去,并由此獲得有用信號(hào),然后精確計(jì)算出具體值,并控制LCD顯示屏顯示相關(guān)數(shù)據(jù)。依靠該單片機(jī)系統(tǒng)的高速AD采集功能以及高速運(yùn)算功能,能夠?qū)SD的輸出電路信號(hào)進(jìn)行即時(shí)修正,以此達(dá)到更高精度地消除干擾、提高檢測(cè)的精確度以及非線性修正的目的,進(jìn)而獲取更加準(zhǔn)確位置信息。
2.4 AD采樣模塊
本模塊的作用是將電路的模擬信號(hào)量化為數(shù)字信號(hào),即將PSD探測(cè)到的位置模擬信號(hào)轉(zhuǎn)換成頻率,然后利用計(jì)數(shù)器將頻率轉(zhuǎn)換成數(shù)字量。該模塊設(shè)計(jì)采用的是16位的AD 7705,能夠準(zhǔn)確將位置信號(hào)送給主控芯片作為信號(hào)輸入。
2.5 顯示模塊
本模塊選用AMPIRE12864型大屏幕LCD顯示屏,該顯示屏能給駕駛者更好的觀測(cè)體驗(yàn),使數(shù)據(jù)顯示更加清晰明朗,且價(jià)格低廉,制造成本低。
3系統(tǒng)的優(yōu)點(diǎn)
采用基于PSD的位置探測(cè)技術(shù),結(jié)合8路PSD激光測(cè)距模塊,三角激光測(cè)距方法進(jìn)行激光探測(cè)障礙物,通過該模塊來檢測(cè)距離障礙物的信息,最后將檢測(cè)到的信號(hào)進(jìn)行AD轉(zhuǎn)換,單片機(jī)處理后可得到清楚的距離信息,便可直接讀取是否有障礙物以及障礙物的距離,方法簡(jiǎn)單可靠。
4結(jié)語(yǔ)
本設(shè)計(jì)在傳統(tǒng)的車輛避障系統(tǒng)的上,大膽引入了PSD測(cè)距模塊,采用價(jià)格相對(duì)低廉的51單片機(jī)和LCD顯示屏來進(jìn)行電路搭建,在不影響系統(tǒng)精度的前提下大大降低了系統(tǒng)的開發(fā)成本。可為低端車市場(chǎng)提供一個(gè)不錯(cuò)的避障系統(tǒng)設(shè)計(jì)方案,而這將會(huì)有一個(gè)不錯(cuò)的應(yīng)用前景。
參考文獻(xiàn):
[1] 徐文濤. 基于FPGA車輛防碰避障技術(shù)的研究[D]. 貴州大學(xué),2016.
[2] 商靜. 基于主動(dòng)安全性的汽車避障研究[D]. 沈陽(yáng)理工大學(xué), 2012.
[3] 蘇煜偉. 激光三角法精密測(cè)距系統(tǒng)研究[D]. 西安工業(yè)大學(xué), 2013.
[4] 姜蕾. 雙光路對(duì)稱補(bǔ)償?shù)募す馊欠ㄎ灰茰y(cè)量系統(tǒng)[D].浙江大學(xué),2017.
[5] 何曉敏. 高精度激光三角測(cè)量距離系統(tǒng)的研究與設(shè)計(jì)[D].蘭州交通大學(xué),2015.
[6] 王丹丹. 大型回轉(zhuǎn)體件形位誤差非接觸測(cè)量系統(tǒng)研究[D]. 長(zhǎng)春理工大學(xué) 2016.
【通聯(lián)編輯:梁書】
