全自動駕駛模式對地鐵工程造價的影響分析
2019-07-19 06:23:28王文偉
價值工程 2019年9期
王文偉
摘要:文章通過對全自動駕駛地鐵與有人駕駛地鐵之間全面整體的差異分析,劃分了主要差異因素,并分析了不同差異因素的主要新增功能和增強功能,進而得出相應的工程造價指標差異數值,為分析全自動駕駛模式與有人駕駛模式地鐵工程造價的主要差異提供參考。
Abstract: The paper divides the main difference factors through the analysis of the difference between the fully automatic operation subway and the manned subway. It also analyzes the main new functions and enhancement functions of the main difference factors, and then obtains the corresponding engineering cost index difference value. This paper provides reference for the engineering cost difference analysis between the fully automatic operation subway and the manned subway.
關鍵詞:地鐵項目;全自動駕駛;工程造價
Key words: subway project;full automatic operation;engineering cost
中圖分類號:TU723.3 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1006-4311(2019)09-0037-03
0 ?引言
全自動運行系統是基于現代計算機、通信、控制和系統集成等技術實現列車運行全過程自動化的新一代城市軌道交通系統。近年來在世界軌道交通領域上全自動駕駛地鐵逐漸升溫,國外許多城市的地鐵均已引入了無人駕駛系統,如哥本哈根、洛桑、溫哥華、巴黎等等[1-2]。與傳統有人駕駛系統相比,全自動駕駛有利于提高系統安全性、可靠性、可用性,保障大客流軌道交通的安全運營,挖掘線路運營能力,優化運營模式,提升線路自動化水平,降低運營人員的勞動強度,提升運營服務水平,因此全自動駕駛技術是國內未來地鐵建設發展的趨勢和技術制高點,是我國地鐵發展的必然結果[2]。相比其他市政工程而言,地鐵工程涉及專業多、建設周期長、造價高,制約地鐵工程可持續發展的主要因素之一就是其巨大的工程投資。而且相關方也高度關注引人全自動駕駛模式所帶來的地鐵工程投資差異。在此大背景下,研究全自動駕駛模式與傳統駕駛模式之間工程造價的差異意義重大。
1 ?造價指標差異分析
相比傳統有人駕駛模式的地鐵,全自動駕駛地鐵不僅減少了人為誤操作,提升了運營組織的靈活性及運營效率,而且在舒適性與節能方面也有極大的改善,全面提升了地鐵的全自動化程度,真正實現了無人干預的無人駕駛地鐵運行模式。全自動駕駛系統是涉及到土建、設備系統的綜合性工程,需要線路、行車組織、車輛、信號、通信、綜合監控、車輛基地等多個專業進行統籌協調設計、緊密配合。基于全自動駕駛系統高安全性、高可靠性、高可用性的特點,這就對相關系統及土建工程提出了更高的要求,勢必會導致建設成本增加。
無人駕駛模式地鐵與有人駕駛模式地鐵二者之間的主要差別在于地鐵車輛、通信系統、信號系統、綜合監控系統、站臺門系統及車輛基地等,具體分析如下[3-4]:
1.1 車輛
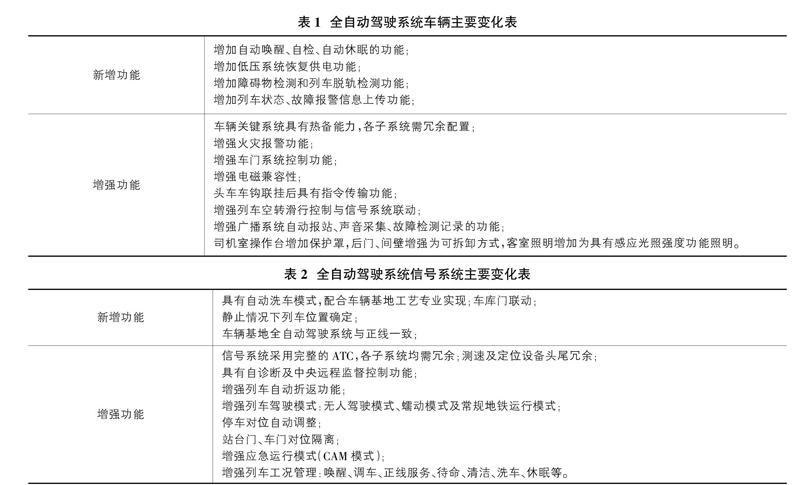
車輛是全自動駕駛地鐵系統的運動載體與核心,整個系統均需始終圍繞“如何實現車輛安全、可靠、高效的全自動運行”而展開。相比傳統有人駕駛系統,全自動駕駛系統車輛的功能需求主要是列車駕駛控制功能、列車停車控制功能、列車自動喚醒與休眠功能、車門/站臺門聯合控制功能、后備蠕動功能、廣播數據與傳輸功能、火災報警功能、障礙物監測功能、遠程控制功能。
與常規地鐵列車相比,全自動駕駛車輛主要變化詳見表1;全自動駕駛地鐵車輛新增功能及增強功能導致其比常規列車每輛車增加約150萬元。假設6B編組的地鐵線,初期配屬車30列,若采用全自動駕駛模式,則地鐵車輛購置費增加的工程投資約為150×30×6=27000萬元。
1.2 信號系統
全自動駕駛相比傳統有人駕駛系統,對于信號系統的要求主要是提高硬件設備的冗余和可靠性,增加與全自動駕駛系統相關的駕駛模式和功能,增強與綜合監控、站臺門等系統的接口功能,增加與車輛基地洗車機自動洗車的功能等;全自動駕駛的信號系統需要增加的設備配置主要包括:①站臺門兩端處和車站控制室IBP盤上增設關門按鈕;②正線停車線、車輛基地停車列檢庫增設精確停車應答器,并配置列車在停車線休眠喚醒后的靜止列車定位應答器或相關定位設備;③車載ATC設備增設休眠喚醒模塊,并增設車載ATC與車輛之間的冗余接口;④車輛基地增設ZC區域控制器設備、自動化區增加無線傳輸設備;⑤增設與車輛基地洗車機的接口;⑥信號系統增設與正線、車輛基地人員防護開關(SPKS)的接口。全自動駕駛信號系統主要變化詳見表2;全自動駕駛地鐵信號系統新增功能及增強功能導致其比傳統模式信號系統每正線公里增加約250萬元。假設6B編組的地鐵線,線路長30km,標準站間距,若采用全自動駕駛模式,則地鐵信號系統增加的工程投資約為250×30=7500萬元。
1.3 通信系統
無論是全自動駕駛系統還是傳統有人駕駛系統的軌道交通線路,通信系統均由傳輸、公務電話、專用電話、無線通信、時鐘、廣播、視頻監視、通信電源及接地、集中監測告警等子系統組成。但相比傳統有人駕駛系統,關鍵的通信系統設備應采取冗余設計,提高系統的可用性和穩定性,增強與其他系統的接口功能。全自動駕駛通信系統需要增加與車載乘客緊急對講的功能及后備控制中心,增強了視頻監控的范圍和功能。全自動駕駛通信系統主要變化詳見表3;全自動駕駛地鐵通信系統新增功能及增強功能導致其比傳統模式通信系統每正線公里增加約30萬元。假設6B編組的地鐵線,線路長度30km,標準站間距,若采用全自動駕駛模式,則地鐵通信系統增加的工程投資約為30×30=900萬元。
1.4 綜合監控系統
相比傳統有人駕駛系統,采用全自動駕駛模式的線路,綜合監控系統在完成常規軌道交通線路的所有功能的基礎上,還應增加一套完整的后備控制中心,同時增加與增強相關系統的接口及聯動功能。全自動駕駛綜合監控系統主要變化詳見表4;全自動駕駛地鐵綜合監控系統新增功能及增強功能導致其比傳統模式綜合監控系統每正線公里增加約30萬元。假設6B編組的地鐵線,線路長度30km,標準站間距,若采用全自動駕駛模式,則地鐵綜合監控系統增加的工程投資約為30×30=900萬元。
1.5 站臺門系統
相比傳統有人駕駛系統,采用全自動駕駛模式的線路,站臺門系統在完成常規軌道交通線路的所有功能的基礎上,還應實現站臺門滑動門與列車車門對位隔離功能。簡而言之,就是即將進站的地鐵車輛若發生故障,車門無法正常開啟,則進站停車時與該地鐵車輛故障車門相對應的站臺門滑動門應能保持鎖閉不開啟(即對位隔離);相應的,若車站內的某一站臺門被人工鎖閉隔離或者發生故障無法正常開啟時,則所有進站的地鐵車輛與之對應的車門均能保持鎖閉狀態,不參與停車時的開關門作業;上述功能通過信號系統與站臺門系統的接口實現。此外,為提高全自動駕駛模式下乘客上下車的安全性,相比常規軌道交通線路工程應進一步增加防護安全措施,增設安全防護裝置。
綜上,相比傳統有人駕駛系統,全自動駕駛的站臺門系統主要是增加了乘客防夾人檢測系統,與信號增加了車門、站臺門的對位隔離功能。全自動駕駛站臺門系統主要變化詳見表5;全自動駕駛地鐵站臺門系統新增功能及增強功能導致其比傳統模式站臺門系統,每個門單元增加約2萬元。假設6B編組的地鐵線,全線24個車站,若采用全自動駕駛模式,則每個車站的站臺門系統增加的費用約為6×8×2=96萬元,全線站臺門系統增加的工程投資約為96×24=2304萬元。
1.6 車輛基地
相比傳統有人駕駛系統,車輛基地主要是結合全自動駕駛系統對場段的需求,優化車輛段/停車場的站場、車庫線路的布局,增加相應的隔離措施等。全自動駕駛系統車輛基地主要變化詳見表6;從表中可以看出,全自動駕駛地鐵的車輛基地新增功能和增強功能中相關信號、通信及綜合監控等系統的變化已經在前面的造價指標差異分析中考慮,單純針對車輛基地章節增加的造價主要體現在停車列檢庫的規模變化,導致房屋土建風水電的費用增加、分區增加的防護圍欄費用以及新增的門禁系統費用;相比傳統駕駛模式,全自動駕駛模式下車輛基地增加的投資約為(0.42萬元/m2×房屋增加面積m2+0.05萬/m×防護圍欄增加長度m+40萬/車輛段或停車場(增設的門禁系統))萬元,一般情況下,全自動駕駛模式下車輛段和停車場停車列檢庫的面積分別會增約2000~3000平米。假設6B編組的地鐵線,設有1個車輛段和1個停車場,采用全自動駕駛模式下,車輛段和停車場房屋分別增加3000平米,車輛段和停車場防護圍欄的長度分別增加5000m,則增加的工程投資約為0.42×3000×2+0.05×5000×2+40×2=3100萬元。
綜上分析可知,全自動駕駛與傳統有人駕駛地鐵相比,造價差異情況主要在于上述分析的幾個方面,具體詳見表7;從表中也可以看出,表中所列差異當中,對造價影響最大的是車輛購置費以及信號系統增加的投資。通過表7所列的造價指標差異,結合具體地鐵項目相關設計資料,即可快速測算出采用全自動駕駛模式所增加的工程投資。
2 ?結語
通過以上分析和研究,文章得出了全自動駕駛系統與傳統有人駕駛系統之間的地鐵工程造價指標的主要差異,其中信號系統與車輛系統的造價指標差異較大,是影響兩種模式之間造價差異的主要因素。文章所確定的主要造價指標差異公式,計算簡單,結果科學合理,具有較強的實用性,對于快速測算、定量比較全自動駕駛地鐵與有人駕駛地鐵兩種方案之間的工程造價差異,具有一定的理論與現實意義。
參考文獻:
[1]UITP. Statistic Brief_World Metro Automation 2016[R]. Belgium:UITP, 2016.
[2]路向陽,李雷,雷成健,馬偉杰,周開成.城市軌道交通全自動駕駛發展綜述[J].機車電傳動,2018(1): 6-12.
[3]謝正媛,李月.城市軌道交通全自動運行系統應用研究[J].數字技術與應用,2018,36(2):53-54.
[4]冉杰.城市軌道交通全自動駕駛通信系統設計方案[J].鐵道通信信號,2018,54(2):89-91.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
音樂探索(2022年2期)2022-05-30 21:01:37
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:46