基于概率神經網絡的電子油門踏板故障診斷
2019-07-20 07:36:34蔣玉秀趙曉歡鄧元望
中南大學學報(自然科學版) 2019年6期
蔣玉秀,趙曉歡,鄧元望
(1.湖南大學 機械與運載工程學院,湖南 長沙,410082;2.廣西工業職業技術學院 汽車工程系,廣西 南寧,530001)
近年來,由于電子油門踏板失靈而導致的交通事故屢見不鮮,如何提高電子油門踏板的安全性,及時判斷和預警故障是至關重要的研究課題。電子油門踏板是駕駛員對車輛的燃油供油量進行機械控制的電子轉換設備,會直接影響到車輛安全性[1]。電子油門踏板將駕駛員腳部壓力轉化為電壓信號。經過轉換的電壓信號被輸入到發動機的電子控制單元(ECU)內[2],實現不同工況下的發動機的燃油供給。電子油門踏板長期暴露在駕駛艙的主駕駛位下方,使用壽命與駕駛員的駕駛習慣、路況工況條件及機械部件強度直接相關,因此,各種故障的發生概率較高[3]。概率神經網絡(probabilistic neural network,PNN)診斷是常用的故障診斷方式之一[4],它基于徑向基函數神經網絡,是一種典型的前反饋型神經網絡模型。目前,概率神經網絡診斷已經廣泛地應用于多個領域,如自行火炮發動機的故障預測[5]、汽輪機故障診斷與報警[6]、大型機械設備故障診斷與容錯[7]、大機組快速響應智能判別與分析[8]、柴油機相關的故障診斷與故障代碼識別[9]、風機故障診斷數據庫建立[10],制冷設備故障分析與匯總[11]、發動機及相關氣閥故障診斷研究[12-13]、軸承的故障診斷與壽命預測[14]、變壓器故障診斷與檢修方式[15]以及異步電機的故障分類與對應維修手段選取[16]等。PNN故障診斷模型具有如下優勢[17-21]:1)結構簡單,多采用的是順序數據計算結構,方便開發和設計多種復雜故障類型;2)具有多元化的特點,可以同時進行故障二次分類和多次分類;3)兼容性較好,故障模式及相關的故障類型具有分類清晰的優點;4)故障模型中的輸入層可以采用徑向基輸入模式,故障檢測時間短;5)故障診斷的正確率高,誤判故障的機率較小,輸出的故障診斷結果列表具備簡單、清晰、明了的特點。為了有效地預測電子油門踏板,判斷故障類型,本文依托PNN 原理,建立電子油門踏板的故障分類模型,通過采集電子油門踏板的電壓信號,成功判斷有無故障以及具體故障類型。監測電子油門踏板工作狀態,可以及時發現故障,對故障進行初始預測、報警后,實時排除故障,不僅可以延長電子油門踏板的使用壽命,而且提高車輛的安全性,對降低電子油門踏板的維護費用、避免交通事故具有重要的指導意義。
1 工作條件及相關要求
1.1 工作條件
故障檢測中使用的電子油門踏板為寧波某公司生產的匹配delphi 高壓共軌電控系統的雙電位式產品。油門踏板內部的電路分為2路,分別為傳感器1和傳感器2(傳感器1 對應的電壓為第1 路電壓,傳感器2對應的電壓為第2 路電壓),其內部的傳感器電路圖如圖1所示。
該電子油門踏板的正常工作狀態下的額定電壓為(5±0.2)V,電流小于等于5 mA(經過濾波后的直流電流);環境溫度為-40~80℃(駕駛艙內實際測量溫度)。
1.2 電路電壓轉換及要求
雙電位電子油門踏板的電壓分為第1 路設計電壓、參考電壓和實測電壓以及第2路設計電壓、參考電壓和實測電壓等6種電壓。電子油門踏板實測的外端電路輸出性能要求如表1所示。
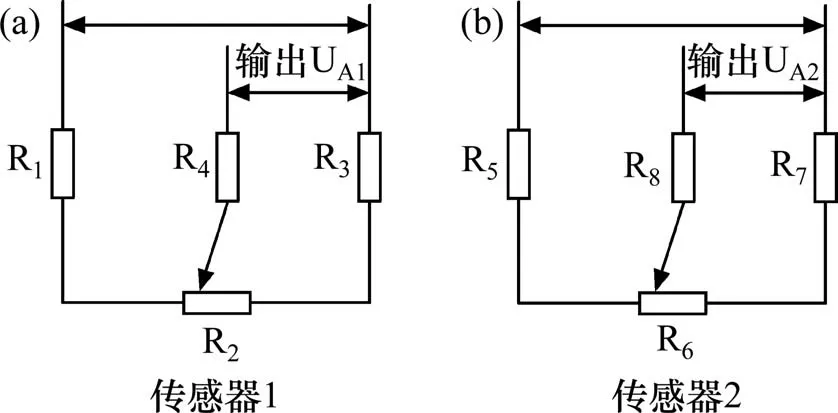
圖1 電子油門踏板傳感器電路圖Fig.1 Schematic of electronic throttle pedal sensor circuit
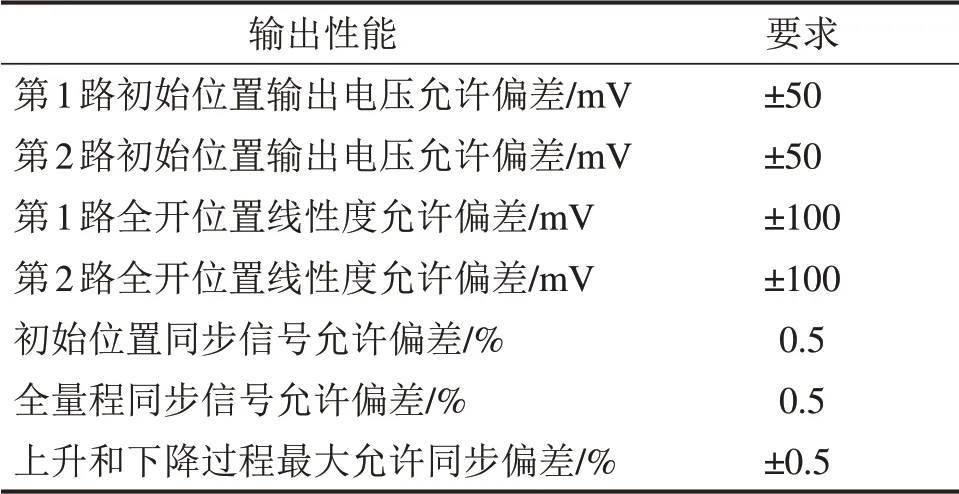
表1 電子油門踏板電路輸出性能要求Table 1 Circuit output performance requirements of electronic throttle pedal
電子油門踏板的任意油門位置設計電壓為初始位置到最大位置的線性差值。線性差值計算式如下:

式中:UA1-nom,UA1和UB1分別為第1 路的設計電壓、實測電壓和參考電壓,V。
同步度的計算式為
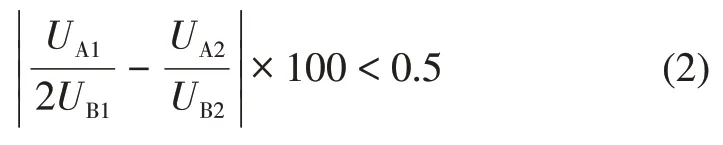
式中:UA2和UB2分別為第2 路實測電壓和參考電壓,V。
2 基于PNN的故障診斷方法
2.1 電子油門踏板PNN模型的建立
故障診斷工作包括判斷有無故障,檢測故障類型,輸出故障結果3個部分。PNN模型的故障診斷原理的本質是貝葉斯最小風險準則(也稱為貝葉斯決策理論),在故障診斷工作中,PNN模型能夠實現Bayes分類規則與Parzen窗概率密度估計,從而完成故障診斷。具體的故障診斷過程如下。
首先,建立第i類樣本的概率密度函數fi(xi):

式中:M為樣本類數;Ω為整個模式空間;xi為維度的橫向量。
其次,根據概率密度函數求出期望風險ρj(xi):

式中:αi為第i類的先驗概率;cji為第i類樣本分成第j類的損失。
最后,根據風險值判斷出相關故障類型后自行識別故障,并輸出具體的故障診斷結果。
本文研究的電子油門踏板概率神經網絡故障診斷流程如圖2所示。

圖2 故障診斷的流程圖Fig.2 Schematic of fault diagnosis
電子油門踏板PNN故障診斷模型的輸入層包含6個不同的神經元,與輸入特征向量的維數相同。隱含層也包含6 個神經元與6 種分類模式(5 種故障模式和1種工作模式)。根據對應的故障數據矩陣類型,用于電子油門踏板的故障診斷的概率神經網絡模型包含12份輸入樣本,每個樣本為6維向量,分類模式為6種。本文設計的電子油門踏板概率神經網絡結構如圖3所示。

圖3 電子油門踏板概率神經網絡結構Fig.3 PNN structure of electronic throttle pedal
電子油門踏板PNN輸入層作為網絡結構的首層,其作用是接收訓練樣本作為第1層的輸入,并將6個特征向量傳遞給PNN。模式層首先計算輸入的6個特征向量與6個故障模式的匹配對應關系,其次才會對6個訓練樣本進行求和運算。電子油門踏板的PNN輸入層的節點算子g(zj)采用下式計算:

式中:zj為特征向量x與加權系數進行乘積后的標量積。
模式層中的輸出概率函數Фij(x)采用下式計算:

式中:i=1,2,3,…,M;j=1,2,3,…,Li。P為訓練樣本的維度;σ為平滑因子;xij為隱中心矢量;Li為訓練樣本數。
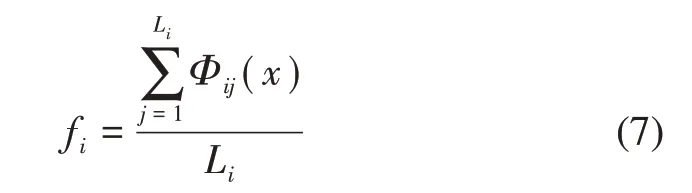
求和層的工作是概率累計后得出6種故障模式的電子油門踏板估計概率密度函數。使用下式計算概率密度函數fi:
電子油門踏板PNN 結構的最后一層是決策層,決策層對6 種故障模式進行判斷后,輸出故障診斷結果。
2.2 電子油門踏板故障分類器設計
概率神經網絡的電子油門踏板的故障診斷隸屬于分類問題,而判斷有無故障則是屬于二分類模式,實際判斷具體的故障類型是典型的多分類模式。本文PNN 診斷方法的分類器采用貝葉斯準則模型原理,具體完成將電壓信號映射為對應故障,因為對應的分類面與貝葉斯分類面接近[22-25],直接使用MATLAB中函數分類工具來定義電子油門踏板的故障類型。
電子油門踏板故障類型定義考慮電子油門踏板的正常工作狀態,合計6種分類模式,對應故障編號和模式如表2所示。

表2 電子油門踏板故障類型Table 2 Failure type of electronic throttle pedal
2.3 故障診斷樣本數據采集試驗
電子油門踏板的數據采集試驗過程如下。
1)測量環境溫度和大氣壓力。數據采集試驗的實測環境溫度是30℃,大氣壓力為標準大氣壓。
2)核對試驗電路的電壓、電流情況滿足要求后,檢查待測電子油門踏板的外觀完整性,油門踏板機械開度能否全開、全閉。
3)連接標定板ECU和deplhi 數據刷寫匹配裝置,使用整車端(非發動機端)數據刷寫測試線連接電子油門踏板的接插傳感器。
4)使用鑰匙開關進行ECU和電控標定系統上電以及自檢。
5)自檢完成后,使用系統清零變量M0對整個系統進行初始化。
6)使用VISU 軟件中的變量M1進行數據采集系統位置歸零。
7)使用變量M2 檢測記錄電子油門的實際開度(由ECU數模轉換模塊將機械開度轉化為電壓信號);
8)使用M3和M5 變量記錄第1 路傳感器實測電壓,M4和M5記錄第2路傳感器實測電壓。
9)保持電子油門踏板的機械開度由0 逐漸過渡100%。
10)同時采集不同油門踏板開度下的循環噴油量數值。
11)經過同等試驗條件連續反復檢測3 次后停止數據采集試驗。
在數據采集過程中,VISU 數據采集軟件中所使用到變量及對應具體形式如表3所示。
電子油門踏板工作時包含豐富的特征信息,如油門踏板的第1 路和第2 路的電壓、油門踏板的位置、第1路和第2路的采集波形參數、循環噴油量等。采集故障樣本特征標準不僅需要數據參數易于測量,而且要求特征指標能夠直接反映電子油門踏板的實際運行狀態,不能影響故障判斷的診斷時間和正確率。電壓信號易于采集,是很多機械及電子設備故障診斷最常用的信號之一。電子油門踏板的機械開度從0 到100%進行變化后,采集相關的試驗樣本數據。電子油門踏板1 個周期內對應的第1 路和第2 路電壓實測值及變化趨勢如圖4所示。

表3 變量及對應具體形式Table 3 Variables and corresponding concrete forms
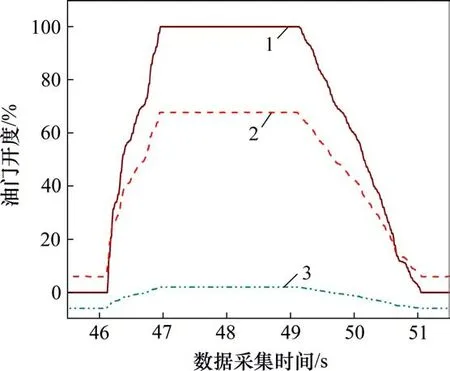
圖4 數據采集周期內電壓與油門開度趨勢Fig.4 Trend of voltage and throttle opening in data acquisition cycle
2.4 電子油門踏板故障診斷樣本
為全面表征電子油門踏板的工作狀況,測試所得的實驗數據滿足電壓線性度和同步度的相關技術要求,再對電壓波形作相關處理,得到第1路電壓、電壓峰度條件,第2路電壓、對應裕度因子、脈沖值和峰值因子,形成一個6 維向量x=[x1,x2,x3,x4,x5,x6]。電子油門試驗數據采集的原始試驗數據經過最大值變量M7和最小值變量M8對系統數據誤差予以消除,并經過數據誤差判斷后才被整理確定為電子油門踏板的訓練樣本數值,如表4所示。根據對應的故障數據矩陣類型,用于電子油門踏板概率神經網絡模型故障診斷的測試樣本數據如表5所示。
3 PNN電子油門踏板故障診斷
3.1 檢驗故障樣本
使用MATLA 軟件中的whos 命令分別檢驗定義的6個故障樣本是否相符,分類模式矩陣和分類模式標簽對應的矩陣維度是否一致以及精度和字節類型是否與初始設定的相同。MATLAB 軟件的最終檢查結果如表6所示。
在分類器設計中,定義和劃分5個故障樣本和1個正常模式,規定6 種故障模式的訓練樣本矩陣為X0=[pro1,pro2,pro3,pro4,pro5,normal]。為縮短故障判斷時間和提高故障檢測的運算速度,規定訓練樣本的分類模式為1×12的行向量,設定其作為訓練樣本的分類模式標簽[1,1,2,2,3,3,4,4,5,5,6,6]。
3.2 故障測試
電子油門踏板故障診斷故障測試時不改變程序其他的運行條件,即控制其他各個層級變量恒定,僅改變輸入的測試樣本,分別測試了4 組數據。測試樣本數據矩陣分別被命名為T1,T2,T3和T4,對應的故障診斷測試順序分別為:1-2-3-4-5-6,1-5-3-4-6-2,3-4-2-1-5-6和6-4-2-3-5-1。
分別輸入測試樣本矩陣T1,T2,T3和T4進行故障測試。
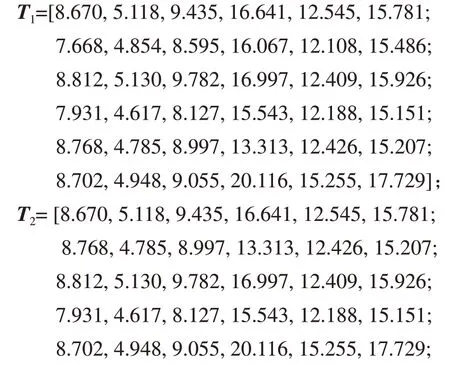
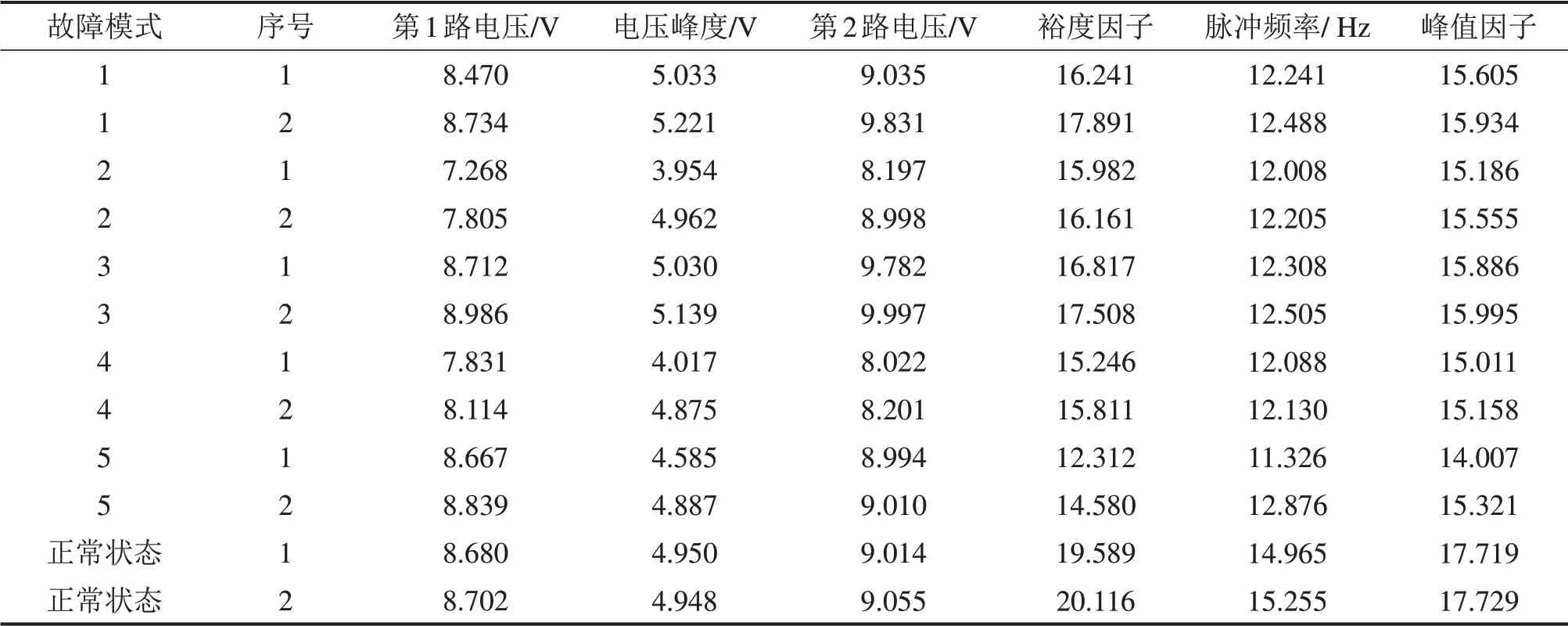
表4 電子油門踏板故障訓練樣本數值Table 4 Sample value of electronic throttle pedal failure training
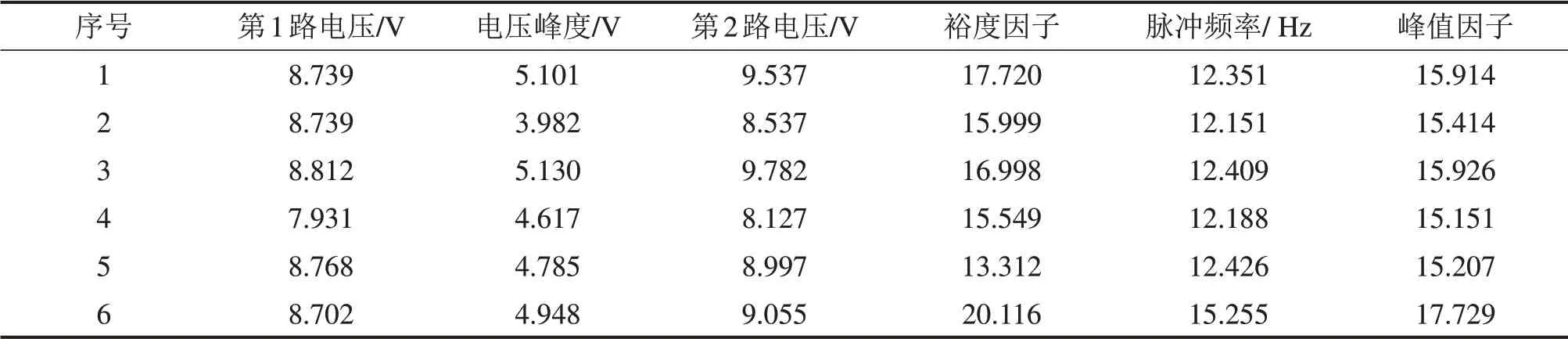
表5 電子油門踏板故障測試樣本Table 5 Test sample of electronic accelerator pedal failure
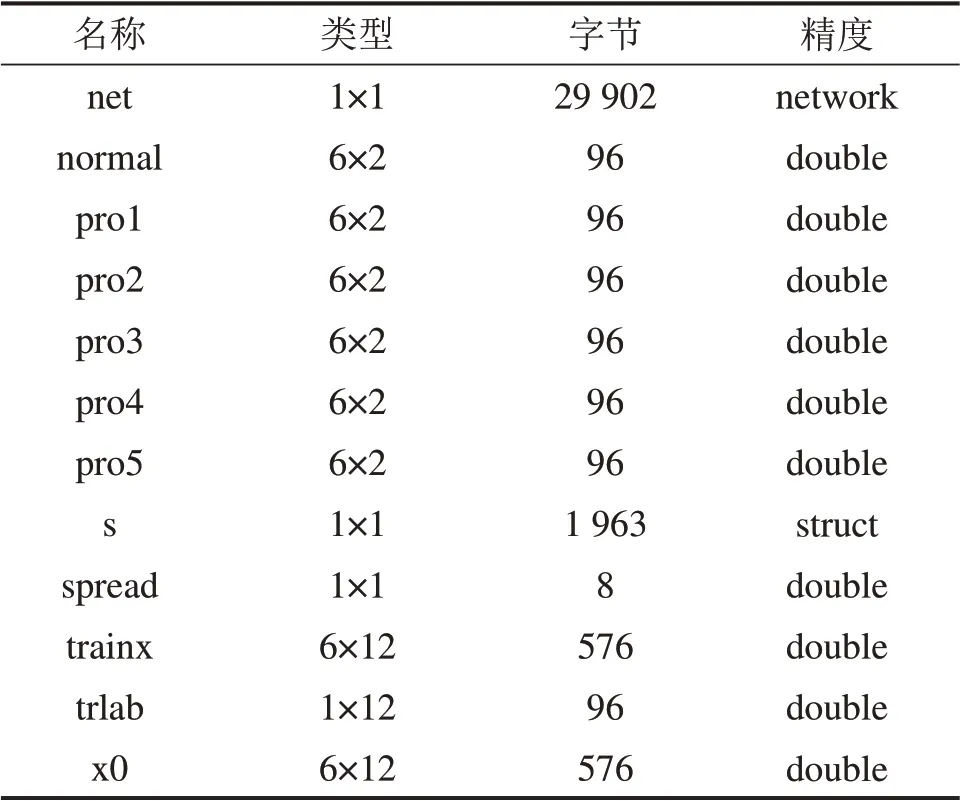
表6 定義的變量對應的維度Table 6 Dimensions of defined variables

4 結果與分析
電子油門踏板故障診斷的輸出結果按照樣本序號、實際類別、判斷類別、判斷結果故障類型的輸出順序顯示。T1,T2,T3和T4測試樣本診斷用時分別為579.295,588.197,591.035和610.155 ms,測試結果如表7~10所示。
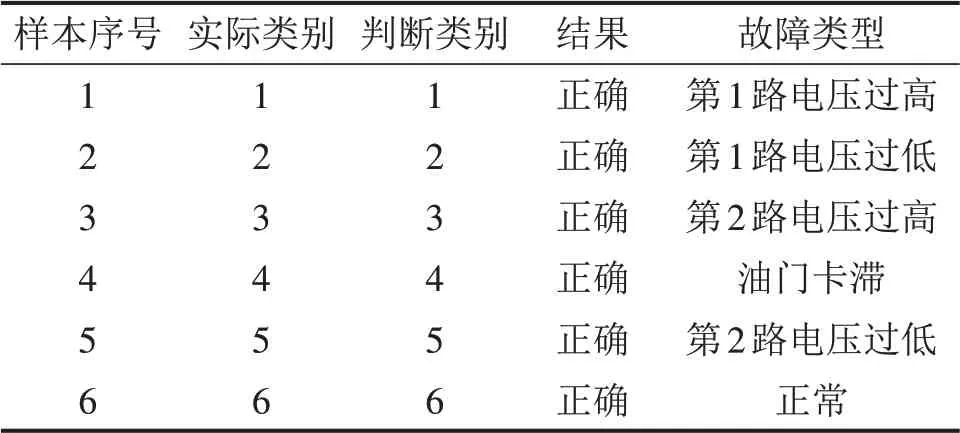
表7 T1樣本的輸出結果Table 7 The output of sampleT1

表8 T2樣本的輸出結果Table 8 The output of sampleT2
故障診斷測試顯示概率神經網絡所進行的故障診斷全部正確,原因如下:
1)PNN 具有訓練容易且收斂速度快的特性,因此,有利于使用在油門踏板等需要適時處理的機械結構部件的診斷應用上。
2)PNN所形成的判決曲面與貝葉斯最小準則對應的曲面高度接近,可以實現任意的非線性逼近,所以,整體的診斷正確率高。
3)PNN的隱含層采用非線性映射函數并且充分考慮不同模式樣本的相互影響,具有容錯自適應性,只要分類器設計合理都會最終收斂并得到準確的判斷結果。
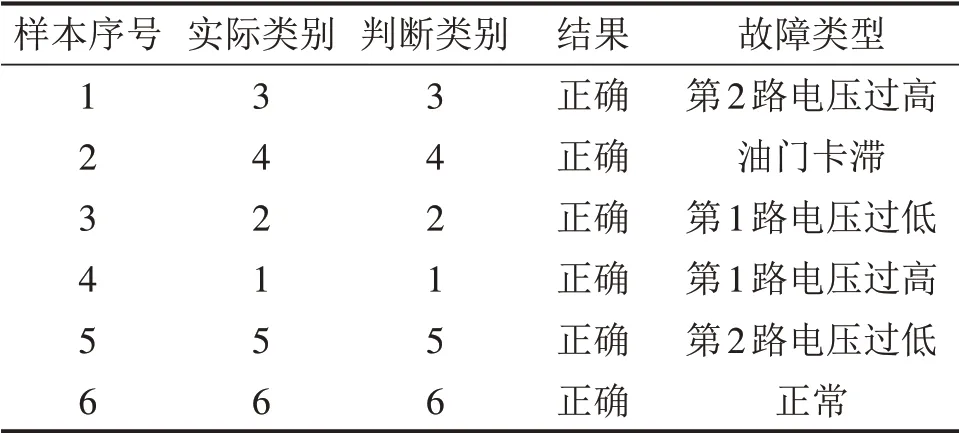
表9 T3的輸出結果Table 9 The output of sampleT3
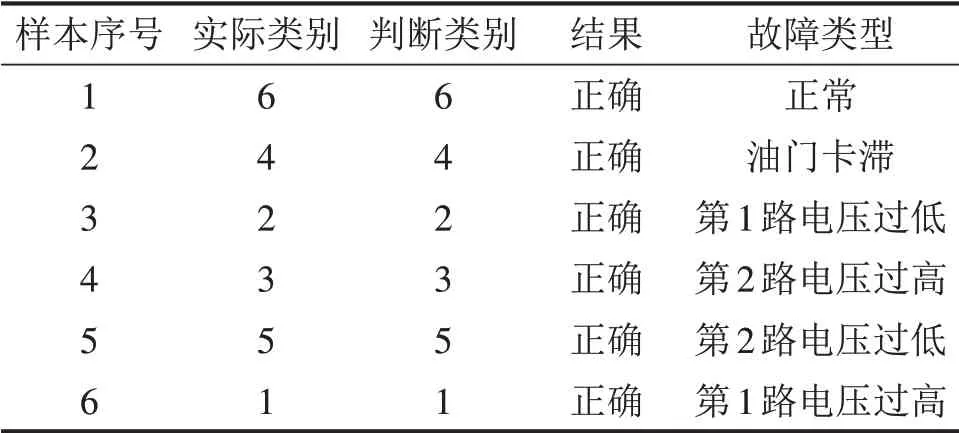
表10 T4樣本的輸出結果Table 10 The output of sampleT4
PNN電子油門踏板的故障診斷工作經過4組測試的對比具有診斷時間短的顯著特點,不同診斷順序下的診斷時間對比如圖5所示。
對比發現最長診斷時間為610.155 ms,出現在樣本T4中,最短診斷時間為579.295 ms,出現在樣本T1中。圖5所示的診斷時間對比情況表明:采用與設定程序完全相同的診斷順序所需要的診斷時間用時最少,即診斷順序和設定順序越紊亂,診斷耗時越長。
診斷用時不同的原因是:
1)故障診斷的過程本質是數據查詢與反復判斷的過程,與設定順序相同的診斷結構可以減少數據對比時間,高效地輸出最終的故障診斷結果。
2)PNN 故障診斷常用的算法主要為學習矢量量化聚類算法(LVQ,learning vector quantization),模糊聚類算法(FCM,fuzzy C-means)和廣義Fisher 判決(GF,generalized fisher)算法。本文不同順序的故障所需要的診斷時間對應的差別可能來自于算法本身的結構。
3)PNN 具有擴充性能好的特點,自身結構就可以增加或減少類別模式,而且不需要重新訓練學習,分類結構對用來估計概率密度的基函數不敏感也會造成診斷用時不同。
為了進一步確定PNN 故障診斷的結果準確性和診斷用時是否最短,本文將相同的故障樣本及分類設計和BP 神經網絡的診斷結果進行對比,如表11所示。經過對比發現,在該電子油門踏板的故障模式及對應的輸入狀態下,PNN診斷更具優勢。
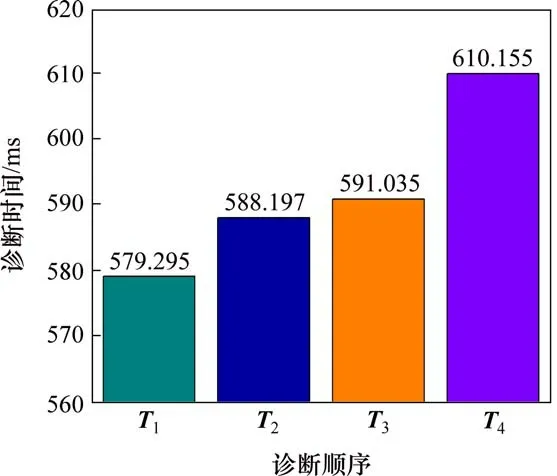
圖5 診斷時間對比Fig.5 Diagnostic time comparison
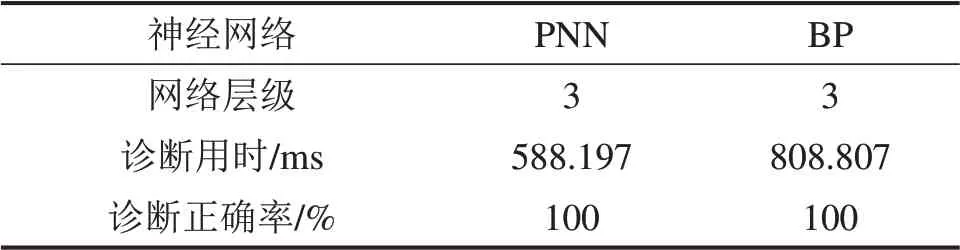
表11 PNN與BP故障診斷結果對比Table 11 Fault diagnosis contrast between PNN and BP
5 結論
1)根據PNN 特點定義6 種故障樣本,通過電子油門踏板故障分類器設計定義了5 種故障判斷模式,該故障模型可以有效測試電子油門踏板的故障,準確判斷故障類型。
2)診斷電子油門踏板對應的故障,得出正確的診斷結果,經過不同測試順序的測試,發現最長診斷時間為610.155 ms(T4樣本),最短診斷時間為579.295 ms(T1樣本),即不同的診斷順序用時不同,順序結構診斷用時最少。
3)對比相同的故障樣本下的PNN和BP的診斷結果,PNN更具優勢。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
黃河之聲(2017年13期)2017-01-28 13:30:17
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21