基于實孔徑成像的水下高速小目標末彈道測量方法
2019-07-25 07:20:34張思宇何心怡
應用聲學 2019年3期
張思宇 何心怡 王 磊 祝 琳
(1 海軍研究院 北京 100161)
(2 中國科學院聲學研究所 北京 100190)
0 引言
隨著水中兵器日益朝著智能化、高機動、大威力的方向發展,精確測量其水下運動軌跡對武器裝備試驗定型、性能評估和戰法訓法制定具有越來越重要的參考意義。水中兵器彈道測量系統主要分為內測系統和外測系統[1?13]。內測系統主要通過目標安裝的慣性裝置測量并記錄航行過程中的加速度、角度和深度等運動參數,進而解算出目標的速度、姿態和軌跡信息。外測系統主要有長基線定位系統、短基線定位系統和超短基線定位系統,通過水下彈道測量系統和目標安裝的合作聲信標測量目標斜距和方向,實現目標定位和軌跡測量。但是,在陌生水域測量高速小目標的末彈道,由于小目標無法安裝合作聲信標且沒有水下彈道測量系統配合,不能測得目標斜距,故傳統方法難以勝任此類情形的末彈道測量。又考慮到目標高速接近靶標的方向未知,目標速度達到了每秒數十米,目標回波的多普勒偏移量大,基于上述背景,文中提出了一種通過基于實孔徑成像測量水下高速小目標末彈道的方法,通過目標回波圖像分辨確定目標坐標,進而測得目標末彈道,并通過湖上實驗進行驗證,取得了較好的測量效果。
1 系統功能結構
在靶標上設計安裝一種聲學成像系統,主要考慮前置預處理、波束形成和后置處理等三個功能部分,如圖1所示[2]。
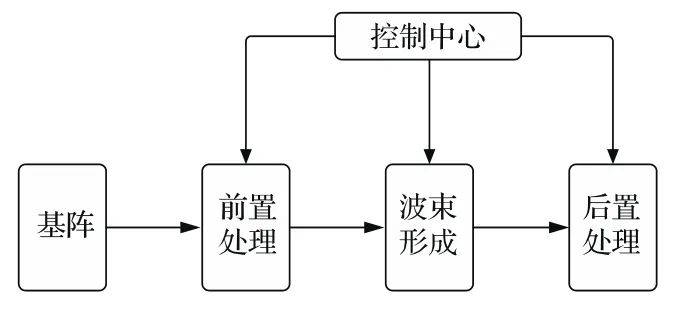
圖1 聲學成像系統的功能分布Fig.1 Functional map of acoustic imaging system
通過將聲學成像系統基陣設計成圓盤狀,在圓周上,均勻排布換能器基陣,滿足測量不同運動方向目標的成像需要,其排布結構如圖2所示,圖2中,R0為圓盤半徑,N為陣元數。該系統的核心是通過圓陣聲吶接收目標回波,經過后置信號處理成像,分辨并確定圖中目標方位,測得目標末彈道。根據圓陣的波束對稱分布有利于進行快速傅里葉變換(Fast Fourier transform,FFT)運算的特點,系統采取專門的數字信號處理(Digital signal processing,DSP)芯片進行FFT,在頻域進行波束形成,縮短信號處理時間,提高成像的實時性。同時,根據高速運動目標的回波多普勒偏移大,導致信號輸出幅值變化和波束指向性偏移引起圖像失真或畸變的問題,針對性設計雙曲調頻信號作為發射信號和采用寬帶信號處理技術,獲得目標回波圖像。

圖2 系統基陣換能器排布Fig.2 Layout of system array transducer
2 波束形成技術
波束形成技術需從發射和接收兩個方面考慮,發射波束時,將基陣經過適當處理能夠在預定方向形成指向性,即將能量集中在指定方向獲取最大的探測距離;接收信號時,通過波束形成使系統定向接收目標信號,抑制噪聲干擾,有效提高信噪比,其實質是空間濾波器[3]。
2.1 圓陣波束形成的基本原理
因為發射波束形成技術和接收波束形成技術的基本原理相同,且系統采用DSP芯片,能夠節約計算時間,提高系統成像的實時性,文中以接收端為例說明圓陣的頻域波束形成,其基本原理如圖3所示。
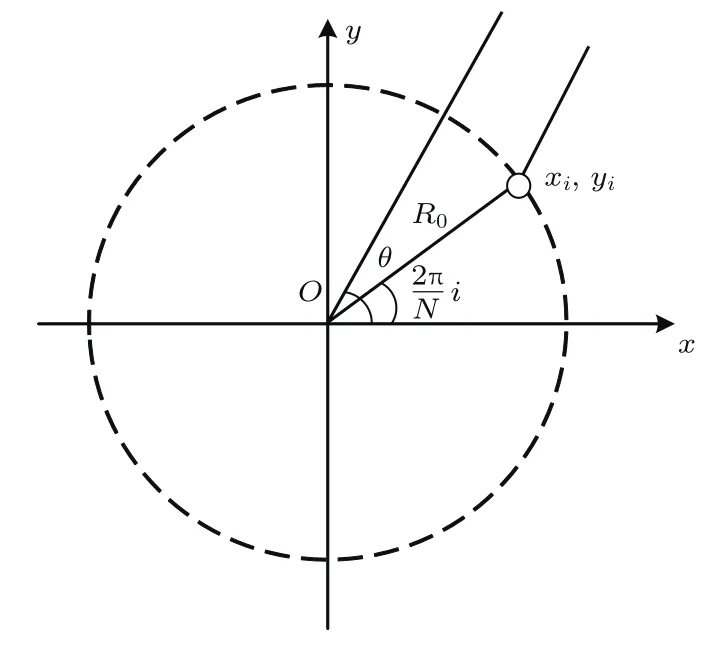
圖3 圓陣波束形成原理Fig.3 Principle of circular array beamforming
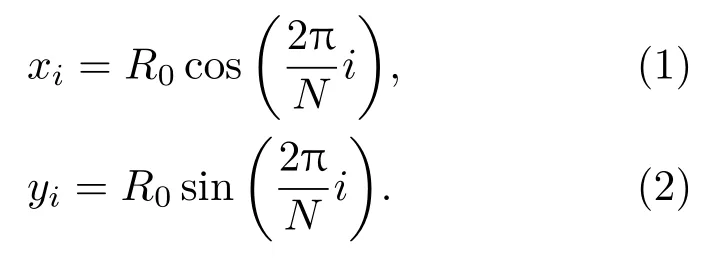
其中,第i個水聽器陣元坐標為
因為信號源到系統的距離遠大于基陣直徑,信號可視為遠場平面波,當信號Xk(i)從第i個陣元以θ角入射時,與圓陣的參考點的相對相移φi為

式(3)中,λ為信號波長。圓陣延時濾波器的傳輸函數Lk(i)為

式(4)中,w(i)為幅度加權系數。再分別對Xk(i)和Lk(i)進行傅里葉變換得

根據傅里葉變換的對稱性,波束形成輸出函數Yk(m)可對和的乘積進行離散傅里葉逆變換(Inverse discrete Fourier transform,IDFT)求得
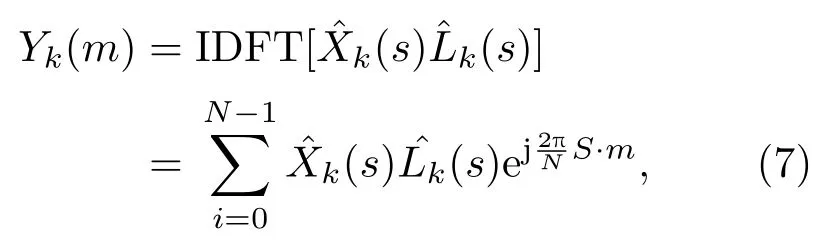
可見,只需要通過三次IDFT運算就可以實現圓陣的波束形成。
2.2 發射信號的選擇
信號的頻率、時間寬度和帶寬是發射信號選擇的重要參數,以保證系統有最遠的作用距離、最優的距離分辨率和最佳的噪聲抑制能力。因為系統按照圓形均勻分布基陣,能夠測量各個方向的接近小目標,故為了實現高精度的軌跡測量,發射信號應選擇距離分辨率好的寬帶信號。被測目標運動速度快,目標回波有較大的多普勒偏移量,則目標方位估計容易出現較大偏差,甚至出現圖形畸變,嚴重影響測量效果,需要選擇的發射信號應具有抑制多普勒頻偏的特性,故選擇雙曲調頻信號作為發射信號,其時間函數為
式(8)中,f0是信號的中心頻率,T是信號的周期。雙曲調頻信號的相位φ(t)和瞬時發射頻率f(t)為

則系統接收的目標回波信號的相位φr(t)和瞬時接收頻率fr(t)為
其中,D為回波頻率相對中心頻率的偏移率。為了保證接收信號瞬時頻移與發射信號瞬時頻率匹配t0,即使得fr(t)=f(t?t0)成立,求得參數t0。即,當時,

可得

因此,在發射雙曲調頻信號探測目標時,只需將瞬時發射頻率平移t0時間,即可保證接收信號瞬時頻移與發射信號瞬時頻率的匹配,聲學成像系統輸出幅度也不會因為目標和靶標的相對運動產生的多普勒頻移而變化,具有較高的探測精度,保證聲學成像系統的圖像穩定。且雙曲調頻信號是寬帶信號,具有較好的距離分辨率,能夠較準確測得目標位置。
3 目標成像技術[5]
由于高速運動的小目標和靶標之間存在較大的相對速度,目標回波存在較大的多普勒偏移量,造成常規波束形成的指向性偏差,產生目標方向測量誤差和目標回波信號強度減弱,對成像效果有較大的影響。且末彈道測量時,目標到靶標的距離一般是百米左右,聲學成像系統接收的信號中,有較強烈的背景混響需要抑制,以保證成像質量。基于此背景,聲學成像系統采用寬帶處理技術形成高速運動小目標的回波圖像,進而測出目標末彈道。
3.1 寬帶處理技術原理
文中采用將每一組接收基陣都進行窄帶濾波處理的寬帶處理技術,對回波信號的每一個頻段都實現波束形成,將各個頻段的波束形成結果通過非相干相加,覆蓋寬帶信號的全部帶寬,實時顯示目標回波圖像,分辨被測目標,其原理如圖4所示。

圖4 寬帶信號處理基本原理框圖Fig.4 Basic block diagram of wideband signal processing
3.2 混響抑制原理
高速運動小目標和靶標之間較大的相對運動速度產生了較大的多普勒偏移量,形成了較大的頻率展寬,而混響的頻帶主要集中在系統發射信號頻率的附近,回波信號處理時,通過將混響頻帶內的權值置零,可以達到有效抑制混響、形成清晰目標回波圖像的目的,如圖5所示。實驗分析見第4節。

圖5 抑制混響原理Fig.5 Suppression of reverberation principle
4 實驗驗證
通過在湖上進行航行器實航探測實驗,驗證實孔徑聲學成像系統的信息采集、寬帶波束形成和后置信號處理的混響抑制方法,能夠獲得較清晰的目標圖像,證明該聲學成像系統可以較精確測得水下高速運動小目標的末彈道。
實驗設備主要包括安裝在水下平臺上(深度約30 m)的圓盤狀實孔徑聲學成像系統、拖船、小球目標(直徑約40 cm,深度約30 m)、信息采集和數據處理等設備,基本實驗系統模型如圖6所示。實驗參數為發射信號中心頻率160 kHz,信號脈寬50 ms,發射間隔50 ms,發射聲源級約200 dB,環境和平臺的噪聲級40 dB左右,且由于信號頻率較高,吸收損失α達到了50 dB/km左右。實驗過程中,拖船以20節左右的航速拖著小球目標運動,期間包括4個直航探測段和3個轉彎調整段,如圖7所示。期間,平臺保持靜止狀態與被測小球基本處于同一深度,目標距離探測系統最近約30 m,最遠約300 m,并利用圓盤狀的實孔徑聲學成像系統對小球目標進行探測。通過數據分析,掌握系統的工作狀況,包括背景干擾(流噪聲及其他聲學系統干擾)、尾流區回波、系統電源干擾以及目標回波情況等,為進一步系統設計提供依據。
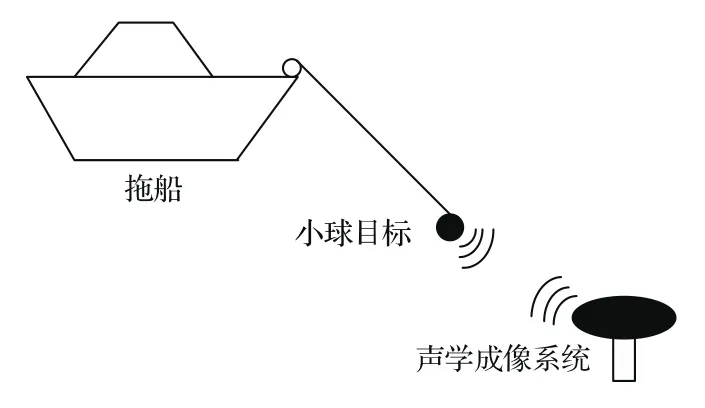
圖6 實驗系統模型Fig.6 Model diagram of experimental system

圖7 實驗拖船及目標小球運動軌跡Fig.7 Trajectory chart of experimental tug and target ball
結合實驗對3.2節混響抑制處理的效果進行驗證,當目標回波信號未進行混響抑制處理時,系統離湖面較近且受到強湖面混響和體積混響干擾,圖像呈現大量的棉絮狀亮斑,難以分辨出目標位置,目標回波基本被混響所掩蔽,如圖8所示。
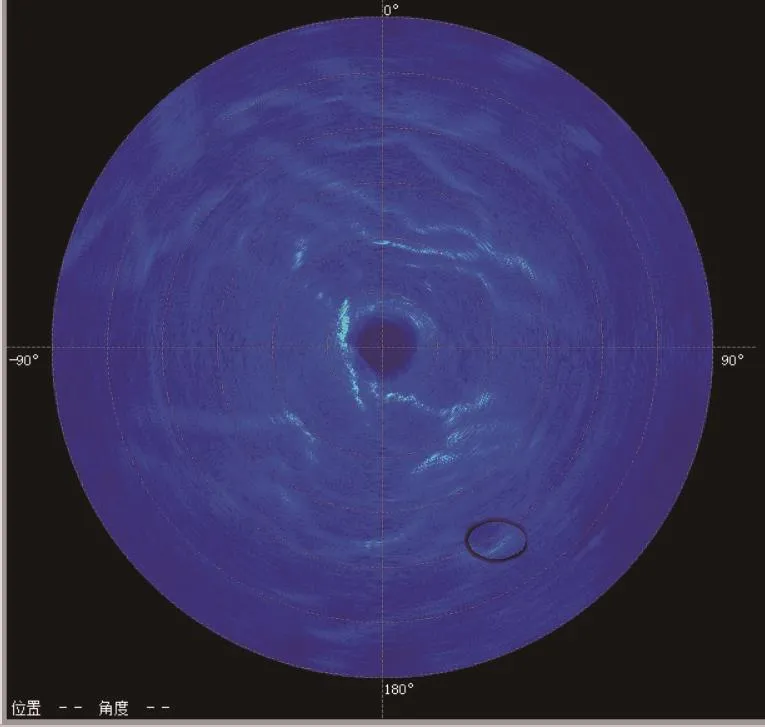
圖8 未進行混響抑制處理的目標回波成像Fig.8 Target echo imaging without reverberation suppression
圖8中,小圓圈內是疑似目標回波,亮斑處主要是混響、拖船輻射噪聲和尾流區回波等背景干擾進入系統構成的成像干擾。考慮到系統探測的距離較近,混響的頻譜偏移量較小,基本在發射信號頻率附近,且目標和系統間相對速度大,目標回波產生較大的多普勒偏移量,和混響頻帶存在明顯的頻帶差異,基于此物理機理對混響頻帶權值置零來抑制混響干擾,凈化圖像背景,突出目標回波的顯示,結果如圖9所示。
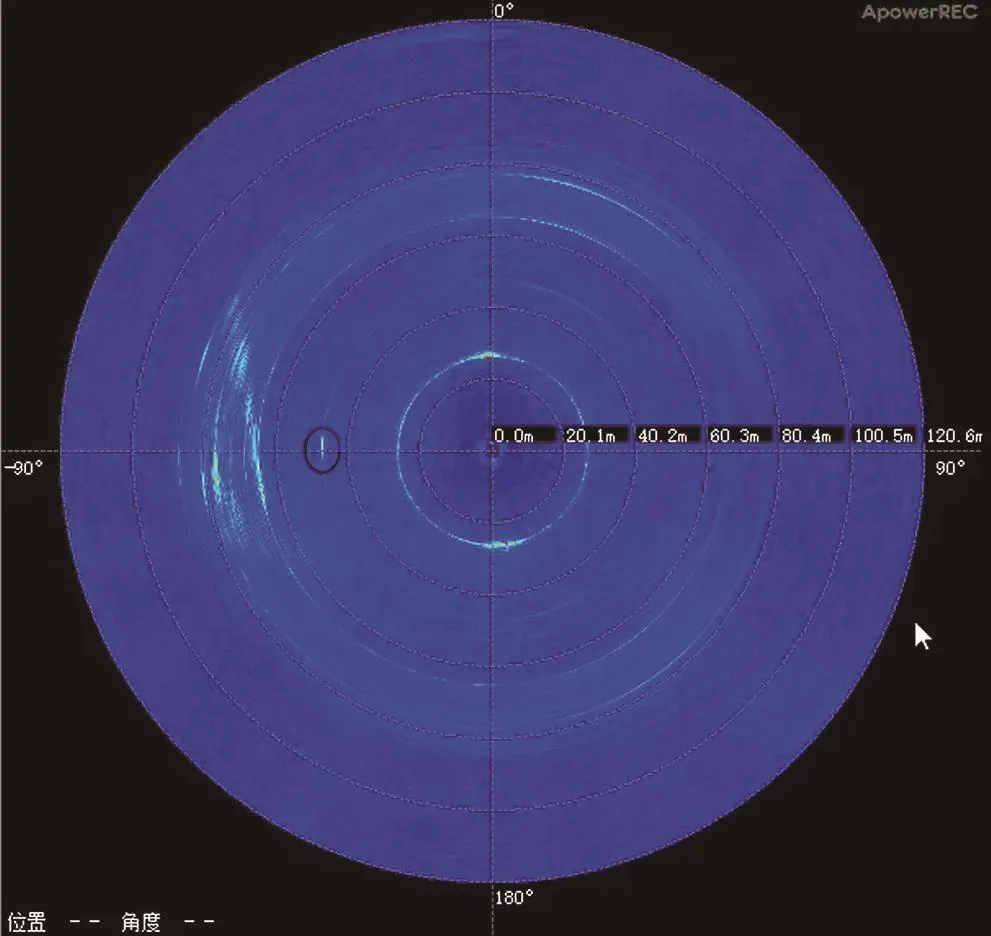
圖9 經過混響抑制處理的目標回波成像Fig.9 Target echo imaging with reverberation suppression
圖9中,背景是較純凈的藍色,說明混響得到了較好的抑制,可以較清晰地辨別出目標回波為(51.3m,?90?)處的亮點,目標左側的亮斑區主要是拖船的流噪聲和尾流區回波進入系統產生的干擾。可見,通過將混響頻帶權值置零的方法,能夠較好地抑制混響干擾,獲得清晰的目標回波圖像,能夠分辨出目標位置。但此方法也存在混響頻譜不能過寬的限制,必要時可用時空自適應處理進一步優化混響抑制性能[14]。對于基于實孔徑聲學成像系統測量水下高速小目標末彈道需要重點考慮目標距離系統最近點、目標接近系統最大距離可分辨點以及目標遠離系統最大距離可分辨點等三個點,才能較好測試系統的探測范圍。本次實驗最近距離點出現在(46.9 m,?117?)坐標位置上,此時目標回波強度最大,如圖10所示。

圖10 最近點目標回波Fig.10 Nearest point target echogram
目標接近系統最大距離可分辨點出現在(113.5 m,189?)坐標位置上,如圖11所示。

圖11 目標接近系統最大距離可分辨點目標回波Fig.11 Target approaching system maximum distance resolvable point target echogram
圖11中,圓圈內的目標回波強度較弱,與干擾的強度相當,較難分辨出目標位置。目標遠離系統最大距離可分辨點出現在(95 m,320?)坐標位置上,如圖12所示。

圖12 目標遠離系統最大距離可分辨點目標回波Fig.12 Target distance away from system maximum distance resolved point target echoes
圖12中,圓圈內為目標回波,其受干擾后的成像情況和目標接近系統最大距離可分辨點類似。可見,本文設計的圓盤狀實孔徑聲學成像系統能夠對到系統直線距離100 m以內的高速小目標的末彈道進行有效測量。
5 結論
文中提出了一種基于圓陣的實孔徑聲學成像系統測量高速小目標末彈道的方法,通過寬帶信號處理技術抑制背景噪聲、尾流區回波和混響,利用雙曲調頻信號作為寬帶調頻信號距離分辨率高的優點,具有多普勒不變性,可克服高速運動目標回波多普勒頻移較大引起圖像失真等優點,獲得了較清晰的目標回波圖像,能夠較好分辨出近距離的目標位置,可解決在沒有水下彈道測量系統的水域測量高速小目標末彈道的問題。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
