變剛度柔性機器人關節的設計與解耦控制方法
2019-08-05 07:20:49張明房立金孫鳳孫興偉
電機與控制學報 2019年7期
張明 房立金 孫鳳 孫興偉
摘?要:設計一種采用永磁變剛度裝置的繩索驅動式柔性機器人關節,在不增加驅動力的情況下,增加關節剛度調整范圍。詳細闡述關節的機械結構和變剛度原理。利用雅可比矩陣和模型間靜力學關系,得到關節剛度,位置和繩索伸長量的對應關系,實現了剛度與位置解耦。建立變剛度關節的動力學模型,以軌跡控制為目標,設計解耦控制器,搭建實驗系統,驗證本方案的可行性。采用永磁彈簧,繩索驅動的柔性關節可以有效的減小關節的質量,慣性和體積,同時具有較大的剛度調整范圍以及較短的調整時間,較快的響應速度和較小超調量。此柔性關節的構型和控制方式也適用于多自由度柔性并聯機器人關節的構建。
關鍵詞:變剛度;磁彈簧;繩索驅動;解耦控制器;柔性關節
中圖分類號:TP 24
文獻標志碼:A
文章編號:1007-449X(2019)07-0120-09
Abstract:The wiredriven flexible robot joint using permanent magnetic variablestiffness mechanism was designed, which increases the variablestiffness range, without increasing the driving tension. The principle and structure of the variablestiffness flexible robot joint were explained. The correspondence between joint stiffness, joint position and wire length were obtained by using the Jacobi matrix and the mechanics relationship between models, which realizes the decoupling of stiffness and position. The dynamic model of the variablestiffness joint was established, a decoupling controller was designed, based on the trajectory control,and the experimental system was set up to verify the feasibility of the scheme. Using permanent magnet spring and wiredriven, the flexible joint can effectively reduce the weight, inertia and volume of the joint,and at the same time, it has a greater variablestiffness range, a shorter stiffness adjustment time, a faster response and a smaller overshoot. This configuration and control method are also suitable for multidegree parallel flexible joints.
Keywords:variable stiffness; magnetic spring; wiredriving; decoupling controller; flexible joint
0?引?言
柔性變剛度機器人關節是不同于傳統剛性機器人關節的一類剛度可調的柔性機器人關節,由于自身剛度可調,可以很大程度的提高人機安全性和環境適應性,已經成為未來機器人發展的重要方向[1-9]。國內外學者在柔性變剛度機器人關節方面已開展了大量的研究和探索,提出了很多的方案和設計。其中主要有:意大利技術研究所(IIT)基于一種彈簧組合設計了一種緊湊的柔性驅動單元AWAS-Ⅰ及改進版AWAS-Ⅱ[3-4],工作原理是通過改變彈簧在杠桿臂上的位置改變剛度,通過控制杠桿臂的轉角實現操作臂的位置控制;德國宇航局的Sebastian Wolf等人提出基于可調預緊力進而改變機器人剛度的關節VSJoint和基于能量觀點的FSJ[5-6];加拿大卡爾頓大學的Chad English等人,首先提出另外一種繩索驅動變剛度機器人[7],工作原理是關節兩側布置非線性彈簧,通過兩個電機運動,改變彈簧的伸縮量來調節關節位置和剛度,構成一種拮抗式變剛度結構,這種形式與人類骨骼肌控制關節剛度與位置形式最接近。日本東京大學的Osada等人,又為上述結構設計出一種新的非線性拉力部件NST [8-9]。采用繩索驅動柔性變剛度機器人可將驅動單元和變剛度模塊后置,特別在構建多自由度機器人時,可以極大地減輕操作臂的質量和慣量,從而解決傳統串聯模式,質量與慣量逐級遞增引起的剛度變化能力不足的缺點。
以上文獻中所涉及的繩索驅動變剛度部件的變剛度能力與電機輸出力矩直接相關,在電機提供的有效拉力范圍內,剛度變化范圍往往較小。本文設計了一種新型的永磁變剛度部件,在不增加電機驅動力矩的情況下,增加了剛度的調整范圍。該柔性變剛度機器人關節采用的繩索布置方式與現有繩索驅動柔性變剛度機器人關節比更加適用于多自由度并聯柔機器人關節的構建。利用雅可比矩陣和模型間靜力學關系,得到機器人關節剛度與繩索剛度的對應關系,實現剛度與位置解耦。建立了變剛度柔性機器人關節的動力學模型。以軌跡控制為目標,為該并聯柔性機器人關節設計了解耦控制器,完成了理論模型推導和實驗驗證,驗證了本方案的可行性。
1?柔性機器人關節機構描述
1.1?柔性關節裝置介紹
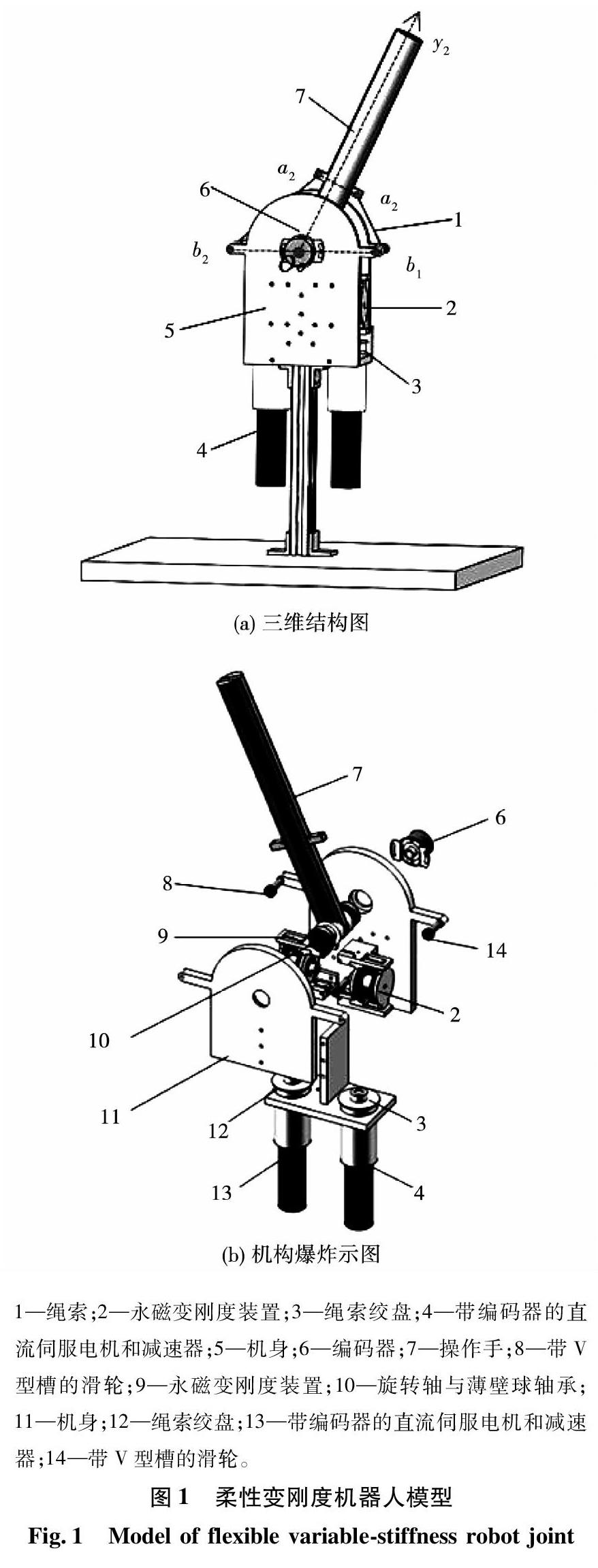
根據變剛度工作原理,完成了柔性變剛度機器人關節的三維模型設計與樣機構建,如圖1所示,柔性變剛度機器人關節的爆炸視圖,如圖1(b)所示。繩索,一端固定在操作手上,然后依次經過帶V形槽的滑輪,永磁變剛度裝置,帶V形槽滑輪,最后固定于繩索絞盤上,操作手兩側對稱布置兩套上述結構,形成拮抗式變剛度機器人關節結構;其中永磁變剛度裝置的定滑輪與帶V形槽滑輪軸線平行且滑輪輪廓外切同一條直線;此種布置可以有效保證繩索的傳動;操作手與永磁變剛度裝置間設置有帶V形槽滑輪,除了起繩索導向作用外,帶V形槽滑輪與旋轉軸間距離o0b1直接影響操作手的力學性能,因此可以根據實際需要調整o0b1距離。操作手7沿旋轉軸10旋轉,旋轉軸10與編碼器6同軸,由編碼器測量操作手的實時位置,從而推算輸出關節的實時剛度值。
之前學者構建的單自由拮抗式變剛度柔性關節大多是圓盤形關節兩側對稱布置變剛度彈簧的柔性關節,但上述布置方式構成的變剛度關節的剛度與位置的解耦方式和關節結構并不適用于繩索驅動的多自由并聯柔性關節的構建,本文設計的永磁柔性變剛度關節布置方式不但適用于單自由度也可以用于構建多自由柔性關節,并進行了相應的剛度與位置解耦研究。
1.2?變剛度裝置介紹
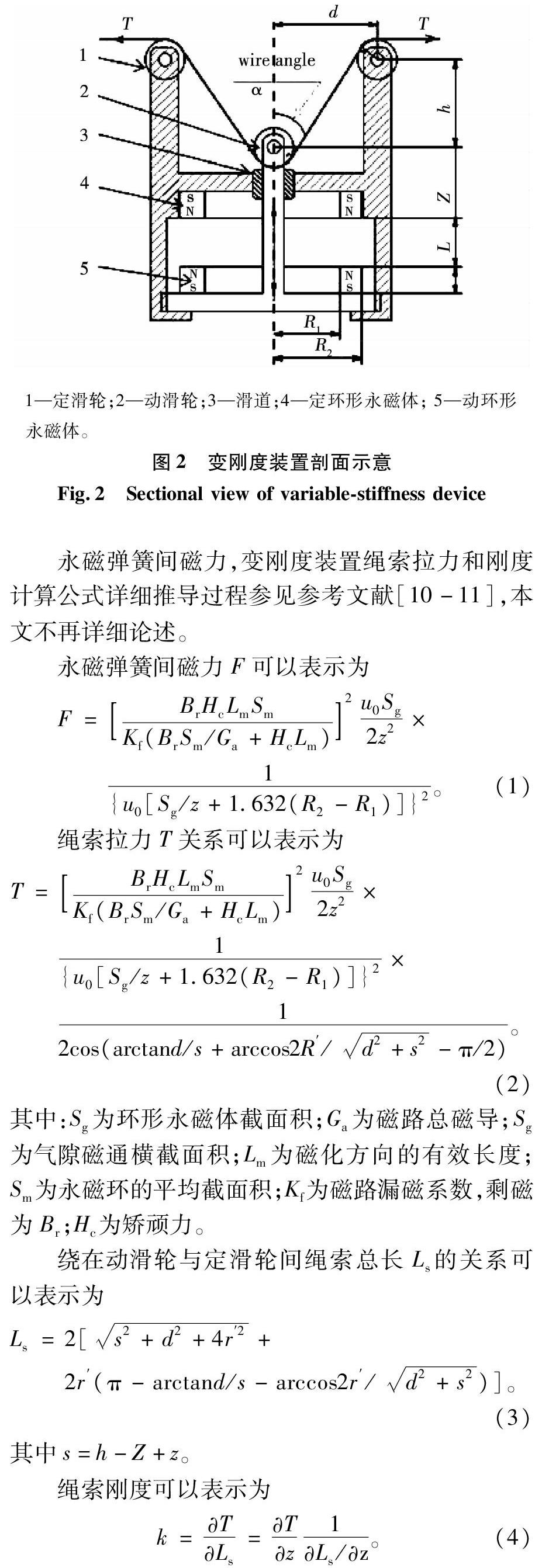
永磁變剛度裝置的結構如圖2所示。該結構主要由永磁彈簧單元和滑輪繩索單元構成。一對環形永磁體同軸,同磁極相對布置,由于滑道的限制,可移動永磁體只能沿軸向滑動,構成一組磁彈簧單元。磁彈簧軸向磁力和剛度隨著氣隙間距的減小呈非線性增加。可以根據力和剛度的要求,布置多組,一組是實現此功能的最少組數。滑輪繩索單元由一個動滑輪,兩個定滑輪和繞在期間的繩索組成,動滑輪與定滑輪間呈等腰三角形布置。在繩索上施加一定力時,動滑輪帶動滑臺向上移動,永磁體間氣隙減小,夾角α增加。繩索拉力T與永磁體間磁力F近似關系為T=F/2cosα,繩索拉力增加。同理可知繩索剛度變化范圍也進一步增加。在繩索拉力一定的情況下,永磁彈簧的非線性和繩索單元的非線性組合使剛度的變化范圍增加。因此,用永磁彈簧代替傳統定剛度金屬彈簧[12]的好處是,實現同樣的剛度變化范圍,繩的拉力就不需要那么大,進而可以減小電機功率與體積。改變磁彈簧單元和繩索單元結構參數,可以改變拉力和剛度曲線的變化范圍和斜率,進而更好的應用到具體工況中。
永磁彈簧間磁力,變剛度裝置繩索拉力和剛度計算公式詳細推導過程參見參考文獻[10-11],本文不再詳細論述。
將永磁體參數和表1中變剛度裝置的結構參數代入數學模型中,計算分析其力學和剛度特性。當軸向氣隙z從0.5 mm變化到14.5 mm,永磁體間磁力F,繩索拉力T的計算結果和實驗測量結果如圖3和圖4所示。由結果可知永磁體間磁力F,繩索拉力T隨著永磁體間軸向氣隙z的減小而增大,且呈非線性變化,剛度變化規律與繩索拉力變化規律基本一致。這是由于在拉動繩索的過程中,永磁體間氣隙減小,同極相對的環形永磁體間的氣隙磁阻隨軸向氣隙位移z減小而減小,磁場強度隨之增加。繩索剛度變化比永磁體間剛度變化范圍增加364.34%,繩索拉力比永磁體間磁力增加136.46%,這是由于在拉動繩索的過程中,夾角α隨著永磁體間氣隙的減小而增加,從而進一步增加了繩索拉力與剛度的變化范圍。這說明,在拉力一定的情況下,上述結構可以增加剛度變化范圍,理論計算與實驗測量的繩索拉力變化趨勢保持一致,但是理論計算值高于實驗測量值,平均誤差在6.76%以內,其原因在于數學模型沒有考慮其他部分磁阻對磁路的影響,且實際情況永磁體間漏磁較嚴重,繩索并非完全剛性等。
2?靜力學分析與剛度解耦
建立坐標系如圖5所示,參考坐標系O0x0y0固定在機架上,O0與此時的旋轉軸方向重合;坐標系O1x1y1固聯在轉軸上,O2x2y2是操作手坐標系。在繩索驅動的并聯機器人研究中大都默認繩索為剛性,通常以繩索長度作為機構運動的廣義坐標,而繩索長度通過測量驅動電機的轉角可以獲得,因此較容易建立起末端操作手位姿的笛卡爾空間與繩索空間(稱繩索長度描述的空間為繩索空間)的映射關系,較容易地實現操作手的位置控制。繩索通過變剛度裝置與操作手連接,此時通過測量電動機轉角獲得的繩索長度包含兩部分:一部分是由操作手位姿變化產生,而另一部分是由變剛度裝置的彈性變形產生,即柔性變剛度機器人存在位置與剛度的耦合。因此,用繩索長度坐標就無法描述操作手的位姿。如能建立起末端操作手的剛度和位置,與變剛度裝置剛度的映射關系,就能實現剛度與位姿的解耦。
其中:Kθ為操作手剛度;J1和J2分別為雅可比矩陣J第一項和第二項。給定操作手位置θ和對應剛度Kθ,采用Newton法對式(2),式(4),式(5)和式(14)構成的非線性方程組進行求解,可以得到對應的永磁變剛度裝置剛度k1和k2,對應繩索伸長量Ls1和Ls2。
3?系統動力學模型與控制器設計
3.1?系統動力學建模
動力學模型是控制系統設計的基礎,其準確性直接影響控制系統的性能。由于永磁變剛度裝置的引入,為了獲得好的控制效果,必須要考慮系統的彈性效應。為了簡化理論分析,又不失一般性,在動力學建模時作以下假設。系統的彈性變形主要是由永磁變剛度裝置引起的,忽略繩索的彈性變形,將其簡化為剛性繩。驅動電機及減速器的質心在各自的轉軸上。系統的動力學模型主要分為操作手和驅動器兩部分,其中前者是非線性耦合的,后者是線性解耦的。考慮永磁變剛度裝置的彈性效應,利用拉格朗日方程得到系統的動力學方程。
該系統采用位置與剛度混合控制策略,結構框圖如圖6所示,給定操作手位置θd,采用剛性并聯機器人位姿變換關系,可以得到由操作手位姿變化引起的繩索長度變化量f1(θd)和f2(θd)。給定操作手剛度Kθ,采用Newton法對式(2),式(4),式(5)和式(14)構成的非線性方程組進行求解,可以得到控制操作手剛度的對應繩索長度Ls1和Ls2。那么此時兩條繩索長度變化量就為f1(u)+Ls1和f2(u)+Ls2。這樣就實現了位置與剛度的解耦控制。然后兩個伺服驅動電機,采用PD位置控制。上述解耦控制器充分考慮了剛度改變時引起的操作臂柔性的不同,實現了操作臂位姿準確控制,也實現了剛度控制。這種方法簡單,容易實現,實用性強。
4?試驗驗證與分析
為了進一步測試永磁變剛度柔性機器人關節的性能,搭建了變剛度柔性機器人關節試驗系統,如圖7所示。該柔性關節的相關參數如表2所示。永磁變剛度柔性機器人關節樣機,驅動器型號為maxon ESCON70/10;控制器為DSpace1103。試驗通過與設備配套的MATLAB/Simulink實時控制軟件直接編寫控制程序進行控制實驗。
4.1?剛度與位置解耦驗證
剛度與位置的解耦驗證,關節水平放置,操作手末端無負載。通過兩種工作情況進行驗證,第一種,保持關節剛度不變,改變關節位置,關節剛度Kθ=20 N·m/rad,關節從0°運動到30°的過程中,關節位置與兩個電機轉角的理論計算和實驗測量結果如圖8(a)和圖8(b)所示。關節轉角理論計算與測量基本保持一致,誤差在1.2%以內。隨著關節轉角的增加,編碼器測量到的關節轉角略小于關節的理論計算值,那是由于系統存在摩擦,還有就是理論計算時關節的名義參數與實際值可能會略有偏差造成的。調整關節位置的過程中,兩個電機的轉角理論值與實際值一致,理論計算值略高于編碼器返回值,是由于電機控制參數未變,在關節運動的過程中,繩索上的拉力增加,導致電機轉角有略微不到位造成的。
第二種,保持關節位置不變,改變關節剛度,保持關節角度θ=5°不變,改變關節剛度,Kθ從5 N·m/rad增加到40 N·m/rad的過程中,關節剛度與兩電機轉角的理論計算和實驗測量結果如圖8(c)和圖8(d)所示。保持關節位置不變,剛度理論值和測量值基本保持一致。
理論計算剛度與實驗測量剛度誤差范圍在8.9%以內,那是由于由于變剛度裝置理論計算值與測量值本身就存在誤差,經過非線性解耦計算后這個誤差依然存在。還有就是關節剛度與位置存在耦合,由于關節名義參數與實際值存在誤差,進一步增加了誤差產生的可能性。改變關節剛度過程中,兩個電機轉角的計算與實際值基本一致,略微有少許偏差,計算值略大于實際值。這是由于關節剛度增加的過程中,繩索上的拉力增加,導致電機轉角有略微不到位。從上述實驗結果可以證明本文所述的剛度與位置的解耦方法,基本可以實現解耦與控制精度要求。
4.2?位置響應試驗
位置階躍實驗,操作手末端作用0.3 kg負載,伺服電機驅動柔性關節操作手快速運動到10°位置。試驗中將柔性關節的剛度值分別設定為30 N·m/rad, 150 N·m/rad,位置響應曲線如圖9所示,關節剛度K2=150 N·m/rad時,柔性關節只有很小的超調量且調節速度最快,振蕩調節時間約為0.18 s。當關節剛度K1=30 N·m/rad 時,驅動器的超調振蕩明顯增加,振蕩調節時間也相應增加,約為0.26 s,不同關節剛度條件下,此柔性關節的超調量都較小,調整時間也較短,這是由于繩索與操作手間設置有永磁變剛度裝置,當位置超調量增大時,繩索拉力與繩長變化量呈非線性關系增加,因而抑制超調的能力更強。由于永磁變剛度彈簧是非接觸式的,機構間摩擦力更小,因此響應更快。
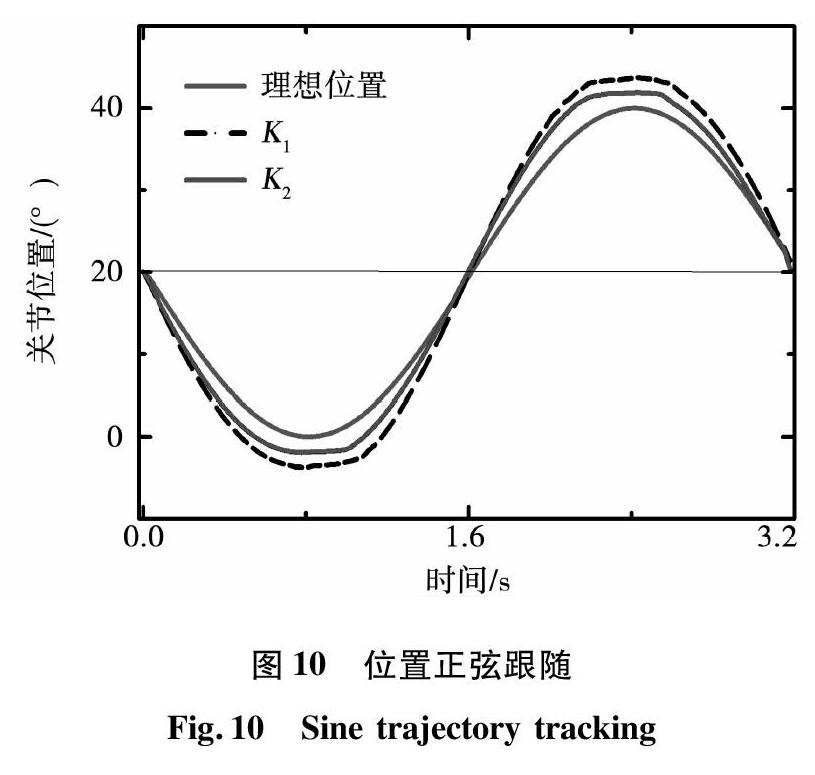
關節水平放置,給關節位置正弦跟隨信號。關節轉動方向與重力矩方向垂直,進行位置正弦跟隨試驗。在操作手末端作用0.3 kg負載,操作手長度為250 mm,兩個伺服電機通過絞盤繩索配合,驅動操作手做位置正弦擺動,相應位置輸入曲線,幅值設置為40°,周期為3.2 s。試驗中分別調節柔性關節剛度為30 N·m/rad,150 N·m/rad,相應軌跡跟蹤曲線如圖10所示,當柔性關節剛度較大時,具有較好的跟隨效果,此時的跟隨誤差最小,隨著剛度值的降低,跟隨誤差逐漸增大。說明操作手質量與慣性和剛度對軌跡跟蹤誤差有較明顯的影響。
4?結?論
1)本文提出了一種新型的采用永磁變剛度裝置的繩索驅動式柔性機器人關節,主要新穎之處是采用同磁極相對布置的環形永磁體和滑輪繩索結構構成永磁變剛度裝置,在不增加繩索拉力情況下,增加了剛度調整范圍。可以通過修改永磁變剛度裝置結構參數,適應不同工作情況要求。
2)對關節空間和繩索空間的映射關系進行推導,利用雅可比矩陣和模型間靜力學關系,得到機器人剛度與繩索剛度的對應關系,實現關節剛度與位置解耦。該解耦方法與構型不但適用于現有關節,也適用于多自由度柔性并聯關節。
3)該柔性機器人關節具有較小的質量,慣量,體積,較短的剛度調整時間和較大的剛度調整范圍,實驗結果表明該解耦控制器可以實現柔性關節位置與剛度的解耦,并具有較快的響應速度和較好的軌跡跟蹤能力。在今后的工作中將考慮動態建模和參數攝動的實時控制方法,爭取柔性機器人在實際工作中盡早的得到應用。
參 考 文 獻:
[1]?王偉,劉立冬, 魏來,等. 柔性齒條式變剛度關節驅動器設計與研究[J].機械工程學報, 2016, 52(1):26.
WANG Wei, LIU Lidong, WEI Lai, et al. Design and research of rackbased variable stiffness actuator[J]. Journal of Mechanical Engineering, 2016, 52(1): 26.
[2]?王顏, 房立金. 機械式仿骨骼肌肉變剛度機構原理及設計[J]. 機器人, 2015 37(4): 507.
WANG Yan, FANG Lijin. Principle and design of mechanically musculoskeletal variablestiffness mechanism[J]. Robot, 2015, 37(4):507.
[3] JAFARI A, TSAGARAKIS N. G, CALDWELL D G. A novel intrinsically energy efficient actuator with adjustable stiffness[J], IEEE//ASME Transactions on Mechatronics, 2013, 18(1):355.
[4] TSAGARAKIS N G, SARDELLITTI I, CALDWELL D G. A new variable stiffness actuator (CompactVSA): design and modelling[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, CA,USA, 2011: 174-179.
[5] WOLF S, HIRZINGER G. A new variable stiffness design: matching requirements of the next robot generation[C]//IEEE International Conference on Robotics and Automation. Pasadena, CA,USA, 2008: 1741-1746.
[6] WOLF S, EIBERGER O, HIRZINGER G. The DLR FSJ:Energy based design of a variable stiffness joint[C]//IEEE International Conference on Robotics and Automation. Shanghai China, 2011: 5082-5089.
[7] ENGLISH C, RUSSELL D, Implementation of variable joint stiffness through abtagonistic actuation using rolamite springs[J].Mechanism and Machine Theory, 1999: 34,27-40.
[8] OSADA M, ITO N, NAKANISHI Y, et al. Realization of flexible motion by musculoskeletal humanoid “Kojiro” with addon nonlinear spring units[C]//IEEE/RAS International Conference on Humanoid Robots. Piscataway, USA: IEEE, 2010: 378-383.
[9] NAKANISHI Y, ITO N, SHIRAI T, et al. Design of powerful and flexible musculoskeletal arm by using nonlinear spring unit and electromagnetic clutch opening mechanism[C]//IEEE/RAS International Conference on Humanoid Robots Piscataway, USA: IEEE, 2011: 377-382.
[10] QIAN K X, ZENG P, RU W M, et al. Novel magnetic spring and magnetic bearing[J]. IEEE Transactions on Magnetics, 2003, 39(1):559.
[11] SUN F, ZHANG M, JIN J, et al. Mechanical analysis of a threedegree of samestiffness permanent magnetic spring[J].International Journal of Applied Electromagnetic and Mechanics, 2016,52(1/2):667.
[12] 孫龍飛, 房立金. 基于變偏置力矩的雙電機系統消隙控制方法研究[J]. 電機與控制學報, 2017, 21(03):89.
SUN Longfei, FANG Lijin. Antibacklash control method of dualmotor driving system based on switching bias torque[J]. Electric Machines and Control, 2017, 21(03):89.
[13] 隋春平, 趙明楊. 3自由度并聯柔索驅動變剛度操作臂的剛度控制[J]. 機械工程學報, 2006, 42(6):205.
SUI Chunping, ZHAO Mingyang. Statics and stiffness study on a 3DOF parallel wire driven flexible manipulator[J]. Journal of Mechanical Engineering, 2006, 42(6):205.
[14] 隋春平, 張波, 趙明楊, 等. 一種3自由度并聯柔索驅動柔性操作臂的建模與控制[J]. 機械工程學報, 2005, 41(6):60.
SUI Chunping, ZHANG Bo, ZHAO Mingyang, et al. Modeling and control of a 3DOF parallel wire driven flexible manipulator[J]. Journal of Mechanical Engineering, 2005, 41(6):60.
[15] CHEN P, LI H. A decoupled control method based on MIMO system for flexible manipulators with FSSEA[C]//IEEE Conference on Robotics and Biomimetics. Zhuhai, China: IEEE, 2015: 662-667.
[16] PAINE N, MEHLING J S, HOLLEY J, et al. Actuator control for the NASAJSC valkyrie humanoid robot: a decoupled dynamics approach for torque control of series elastic robots[J]. Journal of Field Robotics, 2015, 32(3):37.
(編輯:劉素菊)
