飛機(jī)電液伺服作動(dòng)系統(tǒng)建模及分析探究
2019-08-06 03:02:54何歡
中國(guó)設(shè)備工程 2019年13期
關(guān)鍵詞:信號(hào)
何歡
(中航飛機(jī)股份有限公司,陜西 西安 710089)
伺服系統(tǒng)作為自動(dòng)控制系統(tǒng)一類,控制被控對(duì)象的某種狀態(tài)使其能自動(dòng)、連續(xù)、精確地復(fù)現(xiàn)輸入信號(hào)的變化規(guī)律。應(yīng)用廣泛,主要包括各種速度控制、力控制、位置控制和運(yùn)動(dòng)軌跡控制。飛機(jī)舵面操縱常采用位置控制產(chǎn)生期望的力和力矩。本文探究作動(dòng)系統(tǒng)為電液驅(qū)動(dòng)位置伺服作動(dòng)系統(tǒng),采用電信號(hào)輸入、液壓動(dòng)力輸出方式,接入動(dòng)力源的功率輸入,根據(jù)飛控計(jì)算機(jī)的指令,按照規(guī)定的靜態(tài)/動(dòng)態(tài)要求,實(shí)現(xiàn)對(duì)飛機(jī)氣動(dòng)舵面的控制,為穩(wěn)定和控制飛行器提供需要的力和力矩。
1 伺服作動(dòng)系統(tǒng)的具體組成
伺服作動(dòng)系統(tǒng)典型構(gòu)成如圖1 所示,主要包含控制器和作動(dòng)器兩部分。其中伺服閥作為電液轉(zhuǎn)換裝置,是作動(dòng)器的核心機(jī)構(gòu)。其原理在于接收電流指令,使擋板偏轉(zhuǎn),節(jié)流面積差使液壓放大器橋路不平衡,在閥芯上產(chǎn)生驅(qū)動(dòng)力。閥芯運(yùn)動(dòng)時(shí),閥口開(kāi)啟,產(chǎn)生輸出流量正比于閥芯位移,而反饋彈簧產(chǎn)生反饋力抵制輸入力,當(dāng)反饋力等于輸入力,閥芯運(yùn)動(dòng)停止。
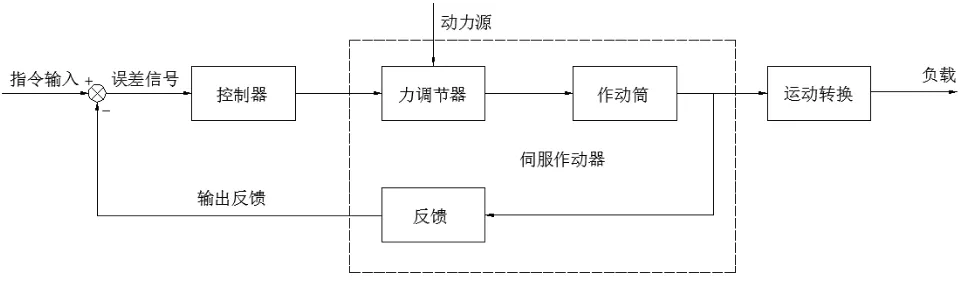
圖1 典型的作動(dòng)系統(tǒng)
2 伺服作動(dòng)系統(tǒng)建模
對(duì)作動(dòng)系統(tǒng)進(jìn)行建模,從物理原理的角度進(jìn)行分析,依次以作動(dòng)筒、作動(dòng)桿為對(duì)象建立牛頓第二定律方程;對(duì)每個(gè)轉(zhuǎn)換、放大和反饋環(huán)節(jié)建立方程;建立流量連續(xù)方程。同時(shí),考慮系統(tǒng)剛度對(duì)系統(tǒng)建模和建模方程產(chǎn)生的影響,依次建立忽略剛度雙作動(dòng)系統(tǒng)、考慮剛度的單作動(dòng)系統(tǒng)和考慮剛度的雙作動(dòng)系統(tǒng)。
2.1 電液系統(tǒng)閉環(huán)方程
(1)系統(tǒng)輸入指令誤差。位移傳感器反饋電壓與輸入電壓進(jìn)行比較,成為輸入指令誤差。其中為作動(dòng)系統(tǒng)輸入電壓,為線位移傳感器反饋電壓,e 為作動(dòng)系統(tǒng)伺服放大電壓。

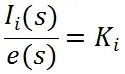
(2)伺服放大環(huán)節(jié)。伺服放大環(huán)節(jié)作用在于將伺服放大電壓信號(hào)轉(zhuǎn)換為伺服閥所需電流信號(hào)。通過(guò)電流信號(hào)的變化,改變閥內(nèi)磁鐵的位置進(jìn)而改變流量。其中為伺服放大輸出電流,為伺服放大增益。
(3)滑閥流量方程。當(dāng)伺服閥頻寬遠(yuǎn)大于液壓固有頻率(5 ~10 倍)時(shí),伺服閥可看作比例環(huán)節(jié);當(dāng)伺服閥頻寬大于液壓固有頻率(3 ~5 倍)時(shí),可將電液伺服閥看作慣性環(huán)節(jié)。


(4)液壓缸流量連續(xù)性方程。由液壓缸特性,流入作動(dòng)筒的流量用來(lái)推動(dòng)活塞運(yùn)動(dòng),補(bǔ)償內(nèi)/外泄露流量和補(bǔ)償油液壓縮和腔體變形所需流量。

(5)位移傳感器反饋方程。位移傳感器用來(lái)測(cè)量作動(dòng)筒和作動(dòng)桿相對(duì)位移,并將差值以電壓信號(hào)形式進(jìn)行反饋。其中為位移傳感器反饋系數(shù)。

2.2 忽略剛度的雙作動(dòng)系統(tǒng)建模

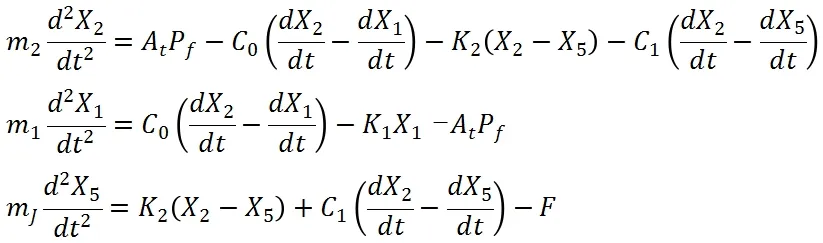
2.3 考慮剛度的單作動(dòng)系統(tǒng)建模
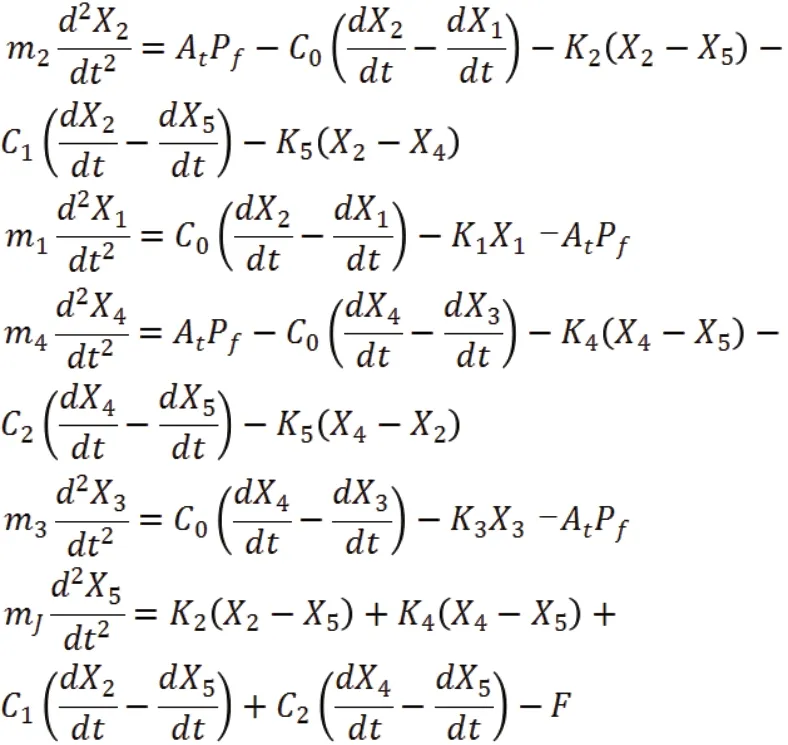
2.4 考慮剛度的雙作動(dòng)系統(tǒng)建模
3 伺服作動(dòng)系統(tǒng)分析
3.1 參數(shù)仿真
對(duì)上述方程進(jìn)行拉氏變換,在Simulink 中搭建考慮剛度的雙作動(dòng)系統(tǒng)模型框圖,如圖2。帶入一組舵機(jī)參數(shù)后,可得到仿真曲線結(jié)果。
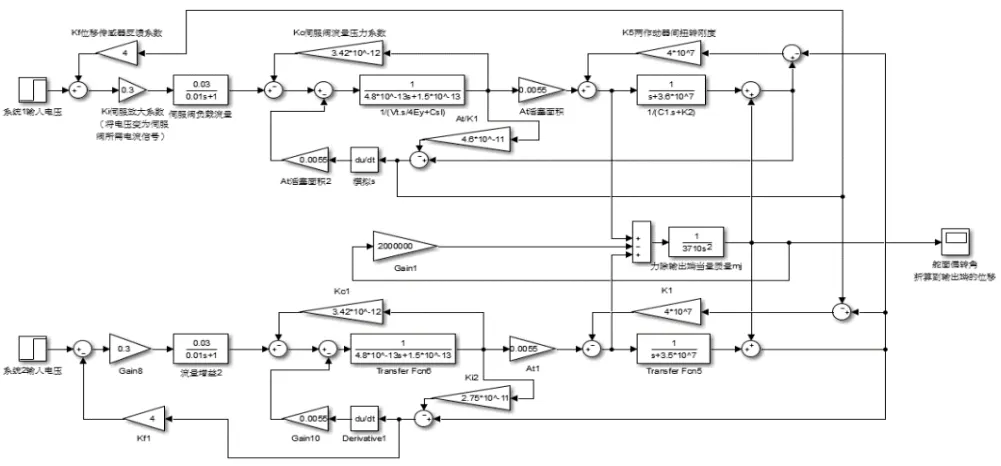
圖2 考慮剛度的雙作動(dòng)系統(tǒng)框圖
3.2 誤差分析
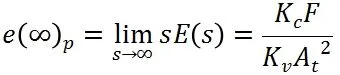
伺服作動(dòng)系統(tǒng)穩(wěn)態(tài)誤差由輸入信號(hào)、外擾負(fù)載力和內(nèi)擾引起。由跟隨誤差計(jì)算可知,系統(tǒng)輸入階躍信號(hào)時(shí)跟隨誤差為0。負(fù)載誤差e 為:
4 結(jié)語(yǔ)
本文對(duì)飛機(jī)電液伺服作動(dòng)系統(tǒng)進(jìn)行動(dòng)力學(xué)建模仿真和分析,不同的物理結(jié)構(gòu)對(duì)應(yīng)有不同的數(shù)學(xué)方程。在后續(xù)舵機(jī)設(shè)計(jì)和選型的過(guò)程中,結(jié)構(gòu)剛度、作動(dòng)器安裝方式和安裝位置對(duì)伺服作動(dòng)的影響需要考慮在內(nèi)。結(jié)構(gòu)剛度過(guò)小將破壞系統(tǒng)穩(wěn)定性,作動(dòng)器位置會(huì)影響負(fù)載力的變化情況。為了減小系統(tǒng)穩(wěn)態(tài)誤差以實(shí)現(xiàn)精確控制,有必要增大整個(gè)系統(tǒng)增益。仿真圖如圖3。
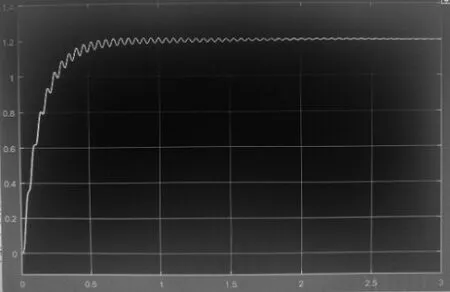
圖3 考慮剛度雙作動(dòng)系統(tǒng)仿真圖
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
