慣性質量對斜拉索阻尼器減振增效作用試驗研究
2019-08-10 03:48:22汪志昊郜輝許艷偉陳政清
振動工程學報 2019年3期
汪志昊 郜輝 許艷偉 陳政清

摘要: 為提升斜拉索被動黏滯阻尼器的減振效果,開展了阻尼器并聯的慣性質量單元對斜拉索減振的增效作用試驗研究。首先基于滾珠絲杠位移增效機制、兩節點慣質單元“inerter”與電磁阻尼技術集成了慣性質量和阻尼系數均具有可調性的慣性質量電磁阻尼器(EIMD)樣機,綜合理論分析與力學性能測試建立了EIMD的力學模型;然后建立模型斜拉索-EIMD減振試驗平臺,通過改變EIMD的慣性飛輪轉動慣量和負載電阻阻值,分別測試分析了慣性質量和阻尼參數對斜拉索面內振動前2階模態附加阻尼比的影響規律;最后對比研究了慣性質量頻率相關型負剛度與恒定型負剛度對斜拉索阻尼器的減振增效作用與機理。結果表明:隨著阻尼器慣性質量的增加,斜拉索前2階附加模態阻尼比均先增加后下降,且第2階模態最優慣性質量小于第1階模態;斜拉索第1,2階模態附加阻尼比最大試驗值分別達到了線性黏滯阻尼器理論最優值的2.02,4.46倍;當慣性質量無量綱負剛度系數逼近“-1”時,斜拉索減振效果提升效應最為顯著;慣性質量頻率相關型負剛度與恒定型負剛度均通過負剛度特性放大阻尼器的位移實現耗能增效,但慣性質量負剛度不會誘發斜拉索減振系統穩定性問題。
關鍵詞: 斜拉索; 慣性質量電磁阻尼器; 振動控制; 負剛度; 耗能增效
中圖分類號: U448.27; U441+.3? 文獻標志碼: A? 文章編號: 1004-4523(2019)03.0377.09
引 言
大跨度斜拉橋的斜拉索極易在外界環境激勵下發生風振、風雨振和參數振動等多種有害振動,斜拉索的有效減振技術對斜拉橋的安全運營至關重要。外置式被動黏滯阻尼器作為一種最常用的斜拉索減振措施,相關優化設計理論與效果評估得到了廣泛研究。在線性黏滯阻尼器方面:Kovacs[1]最早推導了安裝油阻尼器的水平張緊弦斜拉索的第1階模態最優阻尼比;周強等[2]研究了斜拉索抗彎剛度對阻尼器減振效果的影響;段元鋒等[3]給出了考慮斜拉索垂度及阻尼器支撐剛度、內剛度等影響因素的黏滯阻尼器實用設計方法;梁棟等[4]指出了斜拉橋主梁振動對斜拉索阻尼器減振效果的不利影響。在非線性黏滯阻尼器方面:Zhou等[5]研究了斜拉索模態阻尼比的振幅相關性特征;王慧萍等[6]的研究表明非線性黏滯阻尼器相對線性黏滯阻尼器存在一定的減振優勢。上述研究結果表明:被動黏滯阻尼器已在一定程度上解決了斜拉索的振動問題,但減振效果受到安裝高度的制約,對超長斜拉索提供的附加阻尼有限,且阻尼器不可避免的支撐剛度、內剛度以及斜拉索垂度、抗彎剛度和索梁耦合振動等因素均給斜拉索減振效果帶來了不利影響;斜拉索各階模態所需的阻尼器最優參數存在差異,難以同時實現多階模態最優被動控制。
基于MR阻尼器的智能(半主動)控制技術已逐漸成為提升斜拉索減振效果的重要手段[7-13]。理論分析、模型試驗與現場實測結果均表明[9-11]:MR阻尼器半主動控制對斜拉索振動具有更優越的減振效果。Li等[12]指出MR阻尼器半主動控制卓越的減振性能主要歸功于負剛度特性放大了阻尼器的位移。定量分析結果表明[13]:呈現負剛度控制特征的MR阻尼器半主動控制可將斜拉索的最優附加模態阻尼比提高到常規被動線性黏滯阻尼器的2倍以上,且可以較好地實現斜拉索多階模態最優控制。
受半主動控制負剛度特性提升斜拉索減振效果的啟發,研究者提出了并聯負剛度彈簧單元的被動負剛度阻尼器構想[14-16]。Chen等[14]和Zhou等[15]集成了預壓彈簧式負剛度阻尼器;Shi等[16]基于磁場作用力提出了磁致負剛度阻尼器。上述研究結果表明:被動負剛度阻尼器顯著提升了斜拉索的減振效果,并可在一定程度上改善傳統被動阻尼器因安裝位置過低而引起的嵌固效應,主要不足在于當負剛度過大時可能誘發減振系統穩定性問題。
最近具有質量放大效應的兩節點慣質單元“inerter”的引入為實現結構被動負剛度控制提供了新的思路與方法[17-22]。研究表明:并聯慣質單元的阻尼器呈現頻率相關型負剛度特征,可有效提升結構減震效果[18]。在斜拉索振動控制方面:Lu等[19]和Shi等[20]對慣性質量黏滯阻尼器(VIMD)斜拉索減振系統開展了仿真分析和參數優化研究,結果表明VIMD可以實現斜拉索減振效果的大幅提升;Lazar等[21]仿真分析表明調諧慣性質量阻尼器(TID)可顯著提升斜拉索目標調諧模態的減振效果;Sun等[22]提出了有望改善斜拉索多階模態振動控制效果的TID-輔助索復合減振方法。但據目前調研的公開發表文獻,暫未發現慣性質量阻尼器的慣性質量對斜拉索減振效果的增效作用試驗驗證研究。
為此,本文基于滾珠絲杠位移增效機制與兩節點慣質單元,以及阻尼系數連續可調的電磁阻尼技術[23-24],研制了適用于模型斜拉索減振的慣性質量電磁阻尼器(EIMD)樣機,試驗研究了慣性質量與阻尼參數對斜拉索減振效果的影響規律,著重分析了慣性質量單元對阻尼器的耗能增效作用機制,并對比分析了慣性質量頻率相關型負剛度與恒定型負剛度對斜拉索阻尼器的減振提升效果與作用機理。
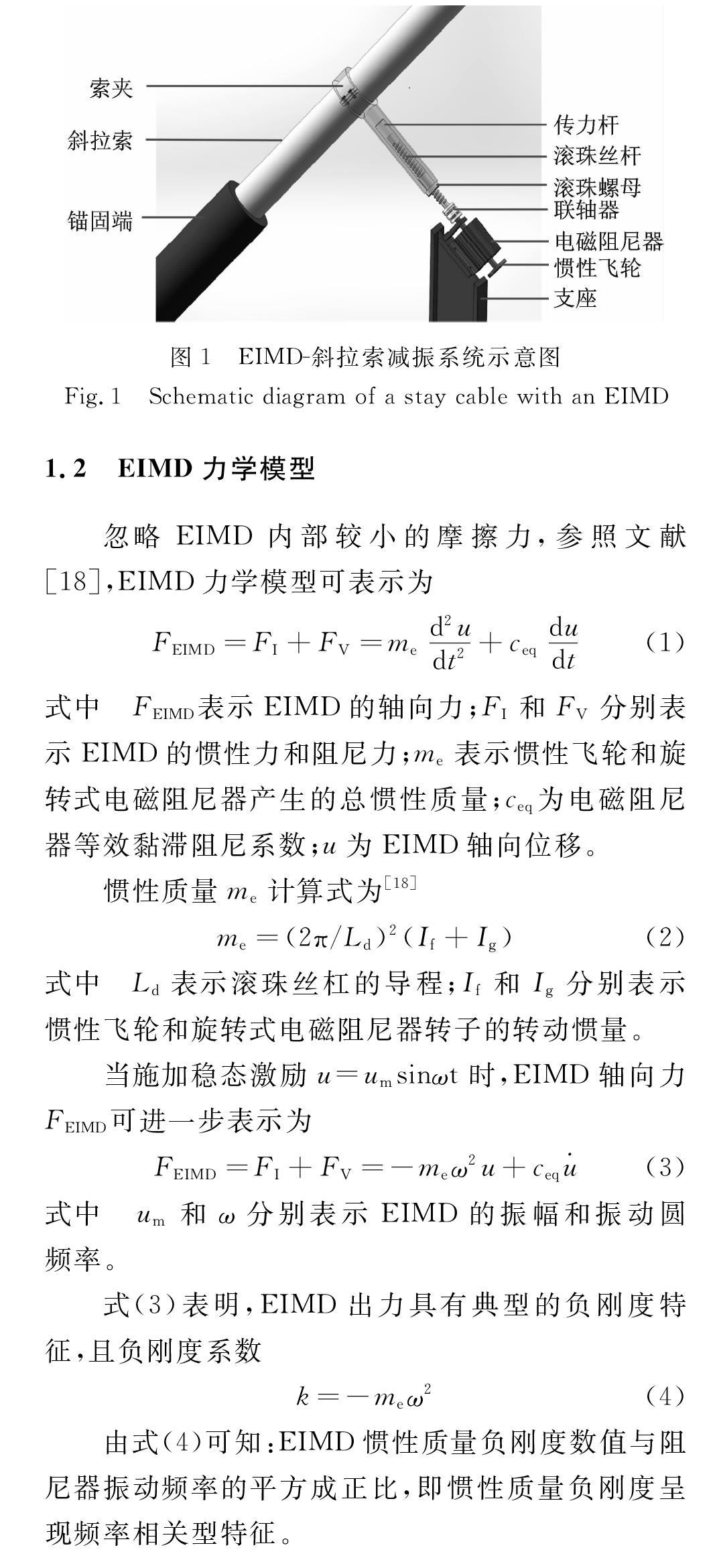
1 EIMD-斜拉索減振系統
1.1 減振系統組成與工作原理? EIMD-斜拉索減振系統構造示意圖如圖1所示,主要包括索夾、傳力桿、滾珠絲杠(含滾珠絲桿和滾珠螺母)、聯軸器、旋轉式電磁阻尼器與慣性飛輪等。斜拉索發生面內振動時,傳力桿將索夾處的斜拉索振動傳遞到滾珠螺母,繼而驅動滾珠絲桿、電磁阻尼器轉子以及慣性飛輪做同步旋轉運動,通過電磁阻尼器耗散能量抑制斜拉索振動。該減振系統的突出特點有:①滾珠絲杠的位移增效機制使慣性飛輪產生遠大于自身物理質量的慣性質量的同時,對旋轉式電磁阻尼器的轉速產生加速效應,實現了阻尼器慣性質量與等效阻尼系數的雙重增效;②慣性質量產生的負剛度效應有望進一步放大阻尼器的位移,實現整體耗能增效以及斜拉索減振增效。
1.3 EIMD樣機力學性能測試
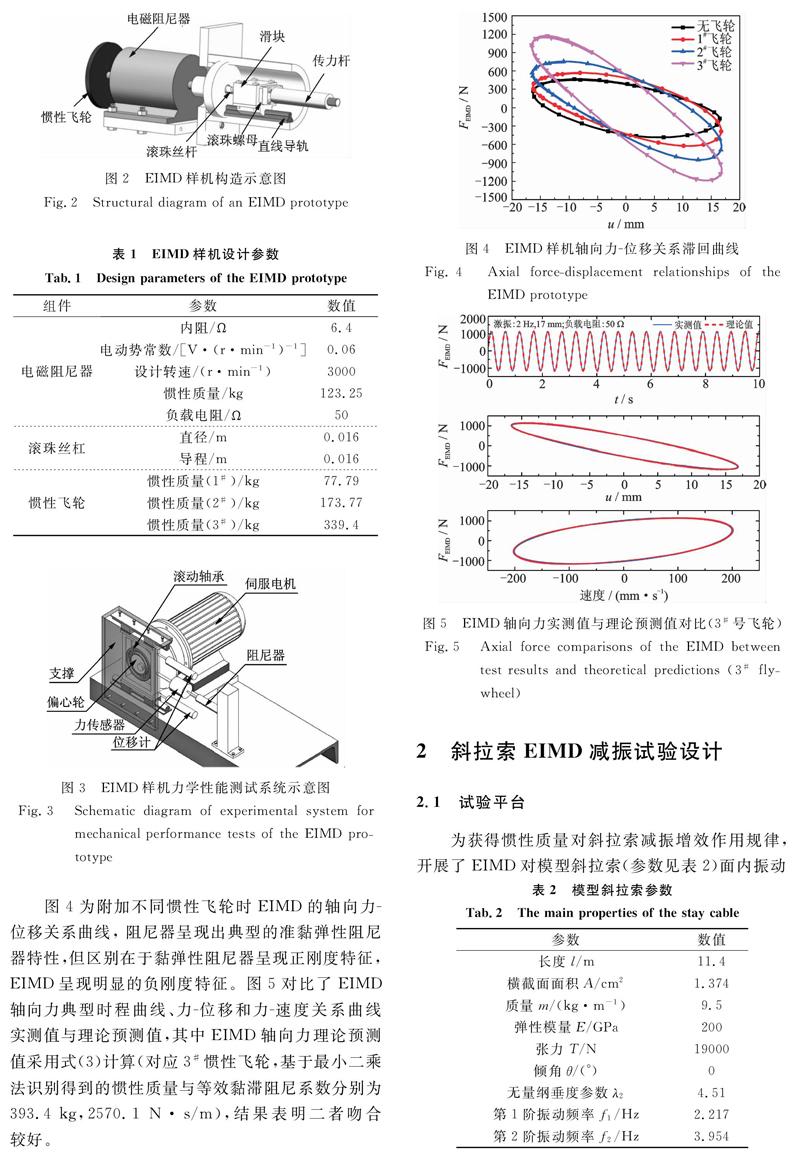
研制的EIMD樣機構造示意圖如圖2所示,相關設計參數如表1所示,其中慣性飛輪規格分為三種。EIMD力學性能測試系統示意圖如圖3所示,分別通過調節變頻器參數與偏心輪偏心距實現加載系統的頻率調整與振幅控制。
圖4為附加不同慣性飛輪時EIMD的軸向力-位移關系曲線, 阻尼器呈現出典型的準黏彈性阻尼器特性,但區別在于黏彈性阻尼器呈現正剛度特征,EIMD呈現明顯的負剛度特征。圖5對比了EIMD軸向力典型時程曲線、力-位移和力-速度關系曲線實測值與理論預測值,其中EIMD軸向力理論預測值采用式(3)計算(對應3#慣性飛輪,基于最小二乘法識別得到的慣性質量與等效黏滯阻尼系數分別為393.4 kg,2570.1 N·s/m),結果表明二者吻合較好。
2 斜拉索EIMD減振試驗設計
2.2 試驗方法? ? ?試驗分別通過改變EIMD負載電阻阻值和慣性飛輪轉動慣量實現EIMD阻尼參數和慣性質量的調節,以獲得阻尼參數與慣性質量對斜拉索阻尼器減振效果的影響規律,具體試驗工況如表3所示。其中:工況1對應普通電磁阻尼器-斜拉索減振;工況2-5分別對應附加不同規格慣量飛輪的EIMD-斜拉索減振,各工況對應的阻尼器無量綱負剛度系數由下式計算
(5)式中 k表示EIMD的負剛度系數;a表示EIMD安裝位置與斜拉索錨固底端的距離;T表示斜拉索張力;ωn表示斜拉索第n階模態振動圓頻率。
斜拉索第1階模態采用四分點處人工激振,第2階模態采用安裝在阻尼器另一側距離拉索錨固段0.645 m(6%l)的電磁激振器激振。每次試驗均首先激發斜拉索產生某一目標模態為主的大幅振動,然后瞬間去除激勵,使斜拉索做相應模態的自由衰減振動。為便于對比分析所有試驗工況斜拉索的減振效果,各階模態阻尼比識別均分別選取斜拉索相同加速度衰減區間的數據進行擬合分析,其中第1,2階模態分別選取4-8 m/s2與10-15 m/s2區間加速度信息。
3 斜拉索減振試驗結果與分析〖2〗3.1 斜拉索第1階模態? 圖7給出了不同工況斜拉索第1階模態跨中加速度自由衰減曲線及相應的頻譜曲線,由圖7可知:阻尼器慣性質量將引起斜拉索的振動頻率略微下降(斜拉索近錨固段安裝的EIMD,其慣性質量可略微增加斜拉索-EIMD耦合系統的模態質量);各工況斜拉索振動加速度均呈現典型的對數衰減規律;斜拉索第1階模態阻尼比從0.22%(無控),增加到0.42%(普通電磁阻尼器控制),繼續增加到0.83%(EIMD控制)。? ? ?圖8進一步對比了斜拉索第1階附加模態阻尼比ξs1隨EIMD慣性質量與負載電阻的變化規律。由圖8可知:EIMD(工況2-5)提供的斜拉索第1階附加模態阻尼比均大于普通電磁阻尼器(工況1),電磁阻尼器附加慣性質量后可有效提升斜拉索減振效果;隨EIMD慣性質量和負載電阻的增加,斜拉索第1階附加模態阻尼比均呈現先增大后減小的趨勢,即EIMD存在最優慣性質量和阻尼參數;斜拉索第1階最大附加模態阻尼比1.01%(對應工況4、40 Ω負載)達到被動線性黏滯阻尼器理論最優附加模態阻尼比0.50%[25]的2.02倍。? ? ?3.2 斜拉索第2階模態? ? ?圖9給出了電磁激振器穩態激勵作用下斜拉索第2階模態四分點位置處的加速度全過程響應曲線以及穩態響應階段加速度均方根(RMS)值。可見,慣性質量的引入顯著降低了斜拉索代表性測點加速度響應幅值和加速度響應均方根值。
圖10進一步對比了斜拉索第2階附加模態阻尼比ξs2隨EIMD慣性質量與負載電阻的變化規律。由圖10可知:EIMD提供的斜拉索第2階附加模態阻尼比隨慣性質量和負載電阻的變化規律與第1階模態基本相同;斜拉索第2階最大附加模態阻尼比2.23%(對應工況2,70 Ω負載)達到被動線性黏滯阻尼器理論最優附加模態阻尼比0.50%[25]的4.46倍;
EIMD工況4對應的斜拉索第2階附加模態阻尼比甚至低于普通電磁阻尼器,表明慣性質量過大反而可能會導致斜拉索減振效果的下降。此外,值得注意的是,斜拉索第2階模態減振對應的最優慣性質量和阻尼參數均小于相應第1階模態。
4 斜拉索減振增效作用機理
4.1 慣性質量阻尼器耗能增效機制? 根據式(3)給出的EIMD力學模型,阻尼器力與位移關系滯回曲線如圖11所示,其中線性黏滯阻尼器(表征本文電磁阻尼器)和EIMD力-位移關系滯回曲線的面積分別表示EIMD阻尼力和軸向力的做功,慣性質量阻尼器的滯回曲線與位移軸圍成面積的代數和表示EIMD慣性力做功。
對比式(6)與式(10)可知:EIMD與黏滯阻尼器滯回曲線的包絡面積完全相等,EIMD慣性力做功為零,即慣性質量自身并不耗散任何振動能量;EIMD仍完全依賴于阻尼元件耗能,且耗能與阻尼器的阻尼系數、振動圓頻率以及振幅的平方成正比。
圖12和13分別給出了斜拉索第2階模態穩態激振對應的EIMD軸向力-位移關系滯回曲線與 EIMD位移時程曲線(含位移均方根值)。由圖可知:當EIMD阻尼參數相同時,慣性質量負剛度效應有助于放大阻尼器位移實現耗能增效和斜拉索減振效果提升;隨著慣性質量的增加,EIMD的位移幅值以及軸向力-位移關系滯回曲線包絡面積均呈現先增大后減小的趨勢,使得斜拉索減振效果隨EIMD慣性質量的增加先提升后下降,當慣性質量過大時(如me=809 kg),甚至產生負面效應。
對比本文慣性質量頻率相關型負剛度結果與文獻[12]和[16]恒定型負剛度結果可知:二者提升斜拉索減振效果的機理基本相同,均通過負剛度效應放大阻尼器位移實現耗能增效,且均在無量綱負剛度系數逼近“-1”時斜拉索阻尼器減振效果提升作用最為顯著;慣性質量負剛度對減振斜拉索的靜位移不產生任何影響(阻尼器兩端產生相對加速度才能形成慣性質量效應),不會誘發斜拉索減振系統的穩定性問題,而恒定型負剛度的無量綱負剛度系數必須滿足特定條件才能保證減振系統的穩定性[16]。
5 結 論
(1)慣性質量可以顯著提升斜拉索阻尼器的減振效果,試驗斜拉索第1,2階模態附加阻尼比最大值分別達到了被動線性黏滯阻尼器理論最優值的2.02,4.46倍。
(2)試驗斜拉索1,2階模態附加阻尼比隨慣性質量和阻尼參數的增加均呈現先增大后降低的趨勢,即斜拉索各階模態均存在最優慣性質量和阻尼參數,且斜拉索第2階模態對應的最優慣性質量和阻尼參數均小于相應第1階模態。阻尼器附加過大的慣性質量將導致斜拉索減振效果的下降,甚至弱于附加慣性質量之前的阻尼器。
(3)慣性質量頻率相關型負剛度與恒定型負剛度提升斜拉索減振效果的機理基本相同,均通過負剛度效應放大阻尼器安裝位置處的斜拉索位移,實現阻尼器整體耗能增效,且均在無量綱負剛度系數逼近“-1”時斜拉索減振增效作用最為顯著;慣性質量頻率相關型負剛度不會引發斜拉索減振系統的穩定性問題,而恒定型負剛度則存在穩定性限制條件。
(4)鑒于斜拉索各階模態對應的EIMD最優慣性質量和阻尼參數均存在差異,為推動EIMD的工程應用,下一步有必要建立斜拉索多階模態最優被動控制的 EIMD 參數優化理論與方法。
參考文獻:
[1] Kovacs I. Zur frage der seilschwin gungen und der seildmfung[J]. Die Bautechnik, 1982, 59(10): 325-332.
[2] 周 強, 王 震, 姜 文. 抗彎剛度對線性黏滯阻尼器拉索力學性能影響[J]. 土木工程學報, 2015, 48(6): 73-80.
Zhou Qiang, Wang Zhen, Jiang Wen. Influence of bending stiffness on mechanical property of cables equipped with linear viscous dampers[J]. China Civil Engineering Journal, 2015, 48(6): 73-80.
[3] 段元鋒, 李 頻, 周仙通, 等. 斜拉索外置式黏滯阻尼器實用設計方法[J]. 中國公路學報, 2015, 28(11): 46-51.
Duan Yuan-feng, Li Pin, Zhou Xian-tong, et al. Practical design method for external viscous dampers of stay cables [J]. China Journal of Highway and Transport, 2015, 28(11): 46-51.
[4] 梁 棟, 孫利民, 黃洪葳. 斜拉橋主梁振動對拉索阻尼器減振效果影響的試驗研究[J]. 振動工程學報, 2009, 22(1): 13-18.
Liang Dong, Sun Li-min, Huang Hong-wei. Experiment on performance of cable dampers influenced by girder vibration for cable-stayed bridges[J]. Journal of Vibration Engineering, 2009, 22(1): 13-18.
[5] Zhou H J, Sun L M, Xing F. Damping of full-scale stay cable with viscous damper: Experiment and analysis[J]. Advances in Structural Engineering, 2014, 17(2): 265 -274.
[6] 王慧萍, 孫利民, 胡曉倫. 斜拉索-摩擦型阻尼器系統的阻尼特性分析[J]. 振動與沖擊, 2016, 35(11): 213-217.
Wang Hui-ping, Sun Li-min, Hu Xiao-lun. Damping characteristics of a stayed cable-friction damper system [J]. Journal of Vibration and Shock, 2016, 35(11): 213-217.
[7] 王修勇, 陳政清, 倪一清, 等. 斜拉橋拉索磁流變阻尼器減振技術研究[J].中國公路學報, 2003, 16(2): 52-56.
Wang Xiu-yong, Chen Zheng-qing, Ni Yi-qing, et al. Study of mitigating cables vibration on the cable-stayed bridges using magnetorheological (MR) dampers [J]. China Journal of Highway and Transport, 2003, 16(2): 52-56.
[8] 何旭輝, 陳政清, 黃方林, 等. 洞庭湖大橋斜拉索減振試驗研究[J]. 振動工程學報, 2002, 15(4): 79-82.
He Xu-hui, Chen Zheng-qing, Huang Fang-lin, et al. Test of vibration mitigation of a stay cable on the Dongting Lake Bridge [J]. Journal of Vibration Engineering, 2002, 15(4): 79-82.
[9] Duan Y F, Ni Y Q, Ko J M. State-derivative feedback control of cable vibration using semi-active MR dampers[J]. Computer Aided Civil and Infrastructure Engineering, 2005, 20(6): 431-449.
[10] 禹見達, 陳政清, 王修勇, 等. 拉索-MR阻尼器系統的半主動控制試驗[J]. 中國公路學報, 2009, 22(4): 72-77.
Yu Jian-da, Chen Zheng-qing, Wang Xiu-yong, et al. Experiment of semi-active control of cable-MR damper system[J]. China Journal of Highway and Transport, 2009, 22(4): 72-77.
[11] 王 浩, 李愛群, 謝 靜,等. 臺風作用下超大跨度斜拉橋抖振響應現場實測研究[J]. 土木工程學報, 2010, 43(7): 71-78.
Wang Hao, Li Ai-qun, Xie Jing, et al. Field measurement of the buffeting response of a super-long-span cable stayed bridge under typhoon[J]. China Civil Engineering Journal, 2010, 43(7): 71-78.
[12] Li H, Liu M, Ou J P. Negative stiffness characteristics of active and semi-active control systems for stay cables[J]. Structural Control and Health Monitoring, 2008, 15(2): 120-142.
[13] Weber F, Boston C. Clipped viscous damping with negative stiffness for semi-active cable damping[J]. Smart Materials and Structures, 2011, 20(4): 045007.
[14] Chen L, Sun L M, Nagarajaiah S. Cable with discrete negative stiffness device and viscous damper: passive realization and general characteristics[J]. Smart Structures and Systems, 2015, 15(3): 627-643.
[15] Zhou P, Li H. Modeling and control performance of a negative stiffness damper for suppressing stay cable vibrations[J]. Structural Control and Health Monitoring, 2015, 23(4): 764-782.
[16] Shi X, Zhu S Y, Li J Y, et al. Dynamic behavior of stay cables with passive negative stiffness dampers[J]. Smart Materials and Structures, 2016, 25(7):075044.
[17] Wen Y K, Chen Z Q, Hua X G. Design and evaluation of tuned inerter-based dampers for the seismic control of MDOF structures[J]. Journal of Structural Engineering, 2017, 143(4): 04016207.
[18] Nakamura Y, Fukukita A, Tamura K, et al. Seismic response control using electromagnetic inertial mass damper[J]. Earthquake Engineering and Structural Dynamics, 2014, 43(4): 507-527.
[19] Lu L, Duan Y F, Spencer B F, et al. Inertial mass damper for mitigating cable vibration[J]. Structural Control and Health Monitoring, 2017, 24(10):e1986.
[20] Shi X, Zhu S Y. Dynamic characteristics of stay cables with inerter dampers[J]. Journal of Sound and Vibration, 2018, 423: 287-305.
[21] Lazar I F, Neild S A, Wagg D J. Vibration suppression of cables using tuned inerter dampers[J]. Engineering Structures, 2016, 122: 62-71.
[22] Sun L M, Hong D X, Chen L. Cables interconnected with tuned inerter damper for vibration mitigation[J]. Engineering Structures, 2017, 151: 57-67.
[23] 汪志昊, 陳政清. 被動電磁阻尼器對斜拉索振動控制研究[J]. 振動與沖擊, 2014, 33(9): 94-99.
Wang Zhi-hao, Chen Zheng-qing. Cable vibration control with a passive electromagnetic damper[J]. Journal of Vibration and Shock, 2014, 33(9): 94-99.
[24] Shen W A, Zhu S Y, Zhu H P. Experimental study on using electromagnetic devices on bridge stay cables for simultaneous energy harvesting and vibration damping[J]. Smart Materials and Structures, 2016, 25(6): 065011.
[25] Pacheco B M, Fujino Y, Sulekh A. Estimation curve for modal damping in stay cables with viscous damper [J]. Journal of Engineering Mechanics, 1991,119(6):1961-1979.
Abstract: To improve the performance of vibration suppression of a stay cable with a viscous damper, an inertial mass element is introduced in parallel with the damper into the system and its effects are investigated through experiments. First, an electromagnetic inertial mass damper (EIMD) prototype with an adjustable inertial mass and an adjustable damping coefficient was designed and fabricated based on the displacement amplification mechanism of ball screw, the two-node inertial mass element ‘inerter, and the electromagnetic damping technology. The mechanical model of the EIMD was then established through theoretical analysis and mechanical performance tests. Second, a test rig for cable-EIMD system was established and parametric analysis was conducted to investigate the effects of inertial mass and damping parameters on the first two order supplemental modal damping ratios of the cable by changing the moment inertia of the flywheel and the load resistance of the EIMD, respectively. Finally, performance improvement and its mechanisms between the inertia mass induced negative stiffness and the constant negative stiffness were compared. The results show that the supplemental modal damping ratios of the first two order modes both increase first and then decrease with the increase of inertial mass, and moreover, the corresponding optimum inertial mass in the second mode is lower than that in the first mode. The attainable maximum first and second supplemental modal damping ratios of the cable with an EIMD can reach 2.02 and 4.46 times of those with only a viscous damper, respectively. When the dimensionless negative stiffness is close to “-1”, the EIMD can achieve the best performance. The improved control performance of the cable with inertial mass induced negative stiffness or constant negative stiffness both attribute to the displacement amplification effect and so to the corresponding energy dissipation effects. However, instability problem can be avoided in the case of inertia mass induced negative stiffness.
Key words: stay cable; electromagnetic inertial mass damper; vibration control; negative stiffness; energy dissipation improvement
