一種基于BP神經網絡的四軸飛行器飛控優化方法
2019-08-13 08:49:34龔賽君
科技資訊 2019年13期
龔賽君
摘 ?要:針對四軸飛行器串級PID控制器參數整定繁瑣的問題,提出在串級PID控制器中加入BP神經網絡的優化方法。利用Simulimk對加入BP神經網絡前后的飛控系統進行仿真。結果表明,加入神經網絡后飛控系統在超調量、響應時間和穩定性等方面都有了明顯的提高。
關鍵詞:串級PID ?BP神經網絡 ?Simulink
中圖分類號:V279 ? 文獻標識碼:A ? ? ? ? ? ?文章編號:1672-3791(2019)05(a)-0011-02
Abstract: Aiming at the tedious problem of parameter tuning of PID controller, a method of adding BP neural network to cascade PID controller is proposed. Simulimk module is used to simulate the flight control system before and after adding BP neural network. The results show that the flight control system with neural network has improved obviously in overshoot, response time and stability.
Key Words: Cascade PID; BP Neural Network; Simulink
在四軸飛行器飛控系統的設計中,通常采用PID控制器來解算控制信號。然而,早期的單級PID控制會導致誤差大、反應不靈敏等問題,采用改進的串級PID(采用角速度控制為內環,角度控制為外環)控制雖然能提升控制系統的穩定性與抗噪性,但又帶來了參數整定繁瑣的問題。鑒于此,該文提出利用BP神經網絡訓練飛控系統,使各項參數達到最佳以提高四軸飛行器整體性能的方法。
1 ?四軸飛行器控制系統設計
四軸飛行器在運動過程中,姿態會隨時間不停變化,因此需要隨時調整電機的輸出才能穩定飛行器的飛行,也就是俗稱的自穩。在遙控器控制或者自主飛行的過程中也需要改變4個電機的轉速,使其達到目標姿態與速度。串級PID控制器是經過改良的PID控制器,即能基本準確地實現目標姿態與實際姿態之間的誤差解算并為電機輸出控制量。串級PID中有兩個PID控制器,內環為角速度,外環為角度,由內環控制器的輸出去操縱控制閥,從而對外環被控量具有更好的控制效果。
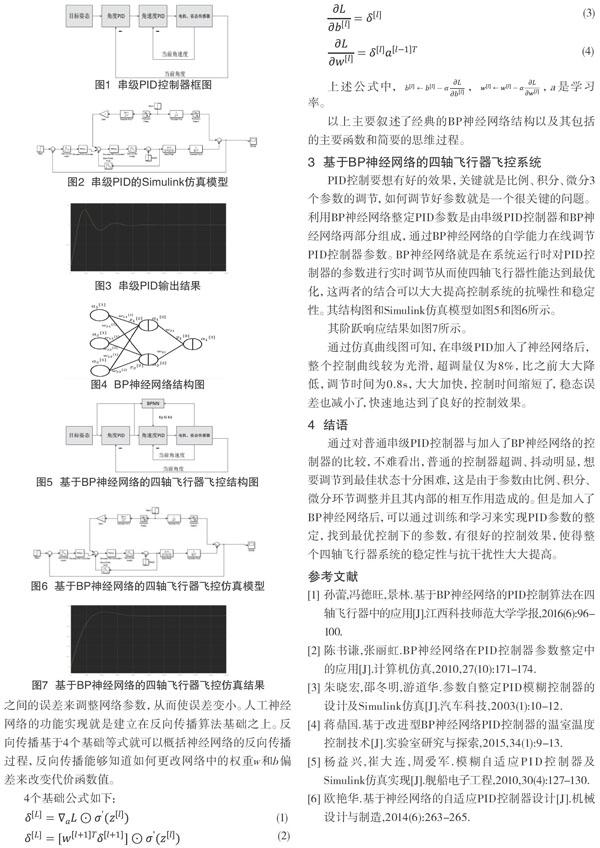
串級PID控制器框圖及其Simulink仿真模型分別如圖1和圖2所示。
其階躍響應結果如圖3所示。
通過仿真曲線圖可知,整個控制曲線超調量為40%,比較大,調節時間為1s,有抖動,結果不是很理想。
2 ?BP神經網絡
BP神經網絡是一種按照誤差反向傳播算法訓練的多層前饋神經網絡,具有任意復雜的模式分類能力和優良的多維函數映射能力,解決了簡單感知器不能解決的疑惑和一些其他問題。從結構上講,BP網絡具有輸入層、隱藏層和輸出層;從本質上講,BP算法就是以網絡誤差平方為目標函數、采用梯度下降法來計算目標函數的最小值。
2.1 BP神經網絡結構
BP神經網絡通常分為3層,第一層為輸入層,第二層為隱含層,第三層為輸出層,其結構如圖4所示。
在圖4中,Wljk表示從絡第(l-1)th中的第Kth個神經元指向第lth中的第個jth神經元的連接權重。使用bi[l]來表示第lth層中第jth個神經元的偏差,zj[l]來表示第lth層中第jth神經元的線性結果,用aj[l]來表示第lth層中第jth神經元的激活。
2.2 損失函數與代價函數
損失函數主要指的是對于單個樣本的損失或者誤差;代價函數表示多樣本同時輸入模型的總體誤差,即每個樣本誤差求和取平均值。
2.3 反向傳播
反向傳播的基本思想就是通過計算輸入層與期望層之間的誤差來調整網絡參數,從而使誤差變小。人工神經網絡的功能實現就是建立在反向傳播算法基礎之上。反向傳播基于4個基礎等式就可以概括神經網絡的反向傳播過程,反向傳播能夠知道如何更改網絡中的權重w和b偏差來改變代價函數值。
以上主要敘述了經典的BP神經網絡結構以及其包括的主要函數和簡要的思維過程。
3 ?基于BP神經網絡的四軸飛行器飛控系統
PID控制要想有好的效果,關鍵就是比例、積分、微分3個參數的調節,如何調節好參數就是一個很關鍵的問題。利用BP神經網絡整定PID參數是由串級PID控制器和BP神經網絡兩部分組成,通過BP神經網絡的自學能力在線調節PID控制器參數。BP神經網絡就是在系統運行時對PID控制器的參數進行實時調節從而使四軸飛行器性能達到最優化,這兩者的結合可以大大提高控制系統的抗噪性和穩定性。其結構圖和Simulink仿真模型如圖5和圖6所示。
其階躍響應結果如圖7所示。
通過仿真曲線圖可知,在串級PID加入了神經網絡后,整個控制曲線較為光滑,超調量僅為8%,比之前大大降低,調節時間為0.8s,大大加快,控制時間縮短了,穩態誤差也減小了,快速地達到了良好的控制效果。
4 ?結語
通過對普通串級PID控制器與加入了BP神經網絡的控制器的比較,不難看出,普通的控制器超調、抖動明顯,想要調節到最佳狀態十分困難,這是由于參數由比例、積分、微分環節調整并且其內部的相互作用造成的。但是加入了BP神經網絡后,可以通過訓練和學習來實現PID參數的整定,找到最優控制下的參數,有很好的控制效果,使得整個四軸飛行器系統的穩定性與抗干擾性大大提高。
參考文獻
[1] 孫蕾,馮德旺,景林.基于BP神經網絡的PID控制算法在四軸飛行器中的應用[J].江西科技師范大學學報,2016(6):96-100.
[2] 陳書謙,張麗虹.BP神經網絡在PID控制器參數整定中的應用[J].計算機仿真,2010,27(10):171-174.
[3] 朱曉宏,邵冬明,游道華.參數自整定PID模糊控制器的設計及Simulink仿真[J].汽車科技,2003(1):10-12.
[4] 蔣鼎國.基于改進型BP神經網絡PID控制器的溫室溫度控制技術[J].實驗室研究與探索,2015,34(1):9-13.
[5] 楊益興,崔大連,周愛軍.模糊自適應PID控制器及Simulink仿真實現[J].艦船電子工程,2010,30(4):127-130.
[6] 歐艷華.基于神經網絡的自適應PID控制器設計[J].機械設計與制造,2014(6):263-265.
