基于無人機遙感影像及其點云特征的 建筑物震害提取
2019-08-19 02:21:45張雪華王曉青杜曉霞賴俊彥許建華
地震研究 2019年2期
關鍵詞:無人機
張雪華 王曉青 杜曉霞 賴俊彥 許建華


摘要:以北川老縣城地震遺址為研究對象,通過使用點云CSF濾波算法得到研究區建筑物高度特征nDSM數據,并通過點云格網化處理以及坡度值計算得到建筑物坡度特征,再結合研究區DOM數據進行建筑物震害提取,實驗結果表明該方法能夠較好地提升建筑物震害的提取精度。
關鍵詞:無人機;遙感影像;點云三維特征;面向對象;建筑物震害提取
中圖分類號:P315.941 ??文獻標識碼:A ??文章編號:1000-0666(2019)02-0230-06
0 引言
地震的發生往往會在瞬間導致大量建(構)筑物等倒塌、道路中斷,同時還有可能引起山體崩塌,形成滑坡,造成巨大的生命財產損失(許建華等,2017)。震后快速、準確地獲取災區災情信息是開展有效應急救援、最大程度減輕地震災害損失的重要保障(王曉青等,2015)。
遙感技術具有觀測范圍大、信息量豐富、技術手段多、更新周期短等優勢,自1966年邢臺地震后,開始被應用于地震災害調查,現已成為快速獲取災情信息的主要手段之一(柳稼航等,2004)。目前,第一時間在大范圍內進行地震災害監測與損失評估使用的數據源主要是衛星光學遙感影像。由于衛星位于云層之上,而震后災區的天氣狀況往往不佳,使得衛星光學影像的質量較差;另外多數遙感衛星只能獲取地物的二維平面信息,在后續的震害信息提取中無法使用到地物的三維信息,而地物三維信息的變化直接顯示了震害的嚴重程度,是進行震害信息提取的重要特征(黃樹松,2016)。
目前獲取地物三維特征的主要手段是機載激光雷達(Light Detection and Ranging,簡稱LiDAR)技術,依靠發射紅外和近紅外波段快速獲取高精度、高密度的地形信息。相對于傳統的航空攝影測量技術,機載LiDAR具有受天氣條件影響較小、可提供三維空間信息等特點(王金霞等,2017)。宿淵源(2015)總結了震害建筑物在光學、合成孔經雷達(Synthetic Aperture Radar,簡稱SAR)、LiDAR數據中的不同表現特征,在此基礎上展開了多源遙感數據建筑物震害信息的聯合分析,最后利用不同數據源組合進行面向對象的建筑物震害信息提取研究,得到較好的建筑物震害信息提取效果。但是,受災區道路條件、雷達設備和費用限制,在震后第一時間獲取雷達數據依然存在一定的局限性(張雪華等,2017)。無人機傾斜攝影技術的出現和發展解決了這一難題,即在同一無人機飛行平臺上搭載多個不同角度的相機,同時從垂直、傾斜等多個不同角度獲取同一目標的影像(陳晉等,2018)。帥向華等(2018)對傾斜攝影技術在2014年魯甸6.5級地震現場的應用進行了研究,發現使用該技術不僅可以表現地震建筑物災害的布局、破壞程度等具體災害特征,還可以對滑坡、堰塞湖等地震地質災害進行解譯和分析。同時,由于傾斜影像數據具有建筑物的立面信息,經過空三測量、多視影像密集匹配等流程,可以得到建筑物的三維點云數據。已有研究表明該點云數據具有較好的精度,如James和Robson(2012)使用無人機遙感系統獲取了高分辨率的海岸地形照片數據,經過處理得到該區域的三維點云數據,通過比較其與差分GPS觀測點之間的誤差,認為其水平和垂直誤差不超過10 cm。
基于前人研究的影像匹配點云可靠性和結合其他數據(如LiDAR數據)的三維信息輔助數字正射影像圖(Digital Orthophoto Map,簡稱DOM)可提升震害提取精確性的研究成果,本文針對多源數據獲取成本高、耗時長,以及不同數據源配準方面的不足,使用無人機單一數據源,結合DOM產品及其密集匹配點云的高度、坡度特征,對北川老縣城地震遺址的建筑物震害進行提取。
1 研究方法
1.1 傾斜攝影測量技術
傾斜攝影測量是在同一飛行平臺上搭載多臺不同傾斜角度的傳感器,獲取地物全方位的遙感影像,同時記錄每張影像拍攝時的位置、航高、飛行姿態等信息,由此得到的遙感影像不僅能夠真實、全面地反映地物情況,還具備精確的地理信息。與正射影像相比,在后期數據分析中可精確確定影像上每個點的三維空間坐標,對建筑物高度等進行厘米級精度量測;可挖掘更多的真實環境信息;通過專門軟件處理可得到較為精細的三維模型(Gerke,Kerle,2011;王偉等,2011;黃敏兒等,2014)。目前傾斜相機系統的鏡頭個數有2~6個(Petrie,2009),常用的5鏡頭傾斜攝影原理如圖1所示。
在傾斜影像處理方面,除了對原始影像數據進行幾何糾正、影像增強等預處理工作外,還包括空三測量、多視影像密集匹配和真正射糾正、三維建模等主要步驟(圖2)。目前已經形成了較為成熟的后期影像處理技術和智能影像處理系統,數據后處理軟件不僅整合了傾斜攝影技術的數據處理功能,還具備有空間分析和應用功能,在地震應急、規劃建設、測繪等行業發揮著越來越重要的作用。
1.2 面向對象影像分析
相對于傳統的基于像元的遙感影像分類方法,面向對象的方法是通過影像分割,將影像分割為由若干個像元組成的對象,然后分析影像對象的光譜、紋理、形狀、幾何等特征,最后進行影像 ??分類。研究表明,對于高分辨率影像,使用面向對象方法不僅彌補了像元分類使用特征種類少、容易產生“椒鹽”現象等不足,同時減少了計算量,提升了分類精度(蔡銀橋,毛政元,2007;Khoshelham et al,2010)。
影像分割是指將相同或者相近的像元合并成同質性高(或異質性小)的互不相交的一系列對象,常用方法有閾值法、邊緣檢測法、聚類分割法、多尺度分割方法等。影像分類時根據對象的光譜、形狀、紋理等特征值,選擇監督或者非監督分類方法。本文使用多尺度分割算法和非監督分類方法,依據數據源特點選擇合適特征進行建筑物震害的提取。
2 實驗分析
2.1 實驗數據
本文選取北川老縣城地震遺址為研究區,使用飛馬F200雙鏡頭傾斜攝影系統獲取研究區高分辨率遙感影像,影像分辨率為0.08 m,旁向重疊度為70%,航向重疊度為80%,共采集影像852張。通過對傾斜影像數據的處理得到研究區高分辨率DOM和密集點云數據,輸出DOM分辨率為0.1 m。通過對點云數據的去噪、布料模擬濾波(Cloth Simulation Filter,簡稱CSF)(Zhang等,2016)、可見光波段差異植被指數(VisibleBand Difference vegetation,簡稱VDVI)去除植被和地面點,得到較為純凈的建筑物點云數據。
式中:ρ代表不同波段的分量值。
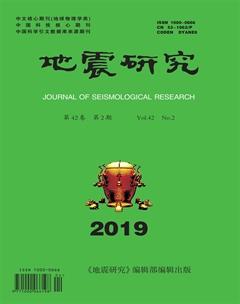
為了更好使用點云數據的高度特征,使用數字化表面模型(Digital Surface Model,簡稱DSM)減去數字高程模型(Digital Elevation Model,簡稱DEM)得到歸一化DSM(Normal DSM,簡稱nDSM)(圖3)。本文使用點云魔方V1.1軟件完成點云去噪、CSF濾波和nDSM數據的生成。
2.2 點云坡度特征提取
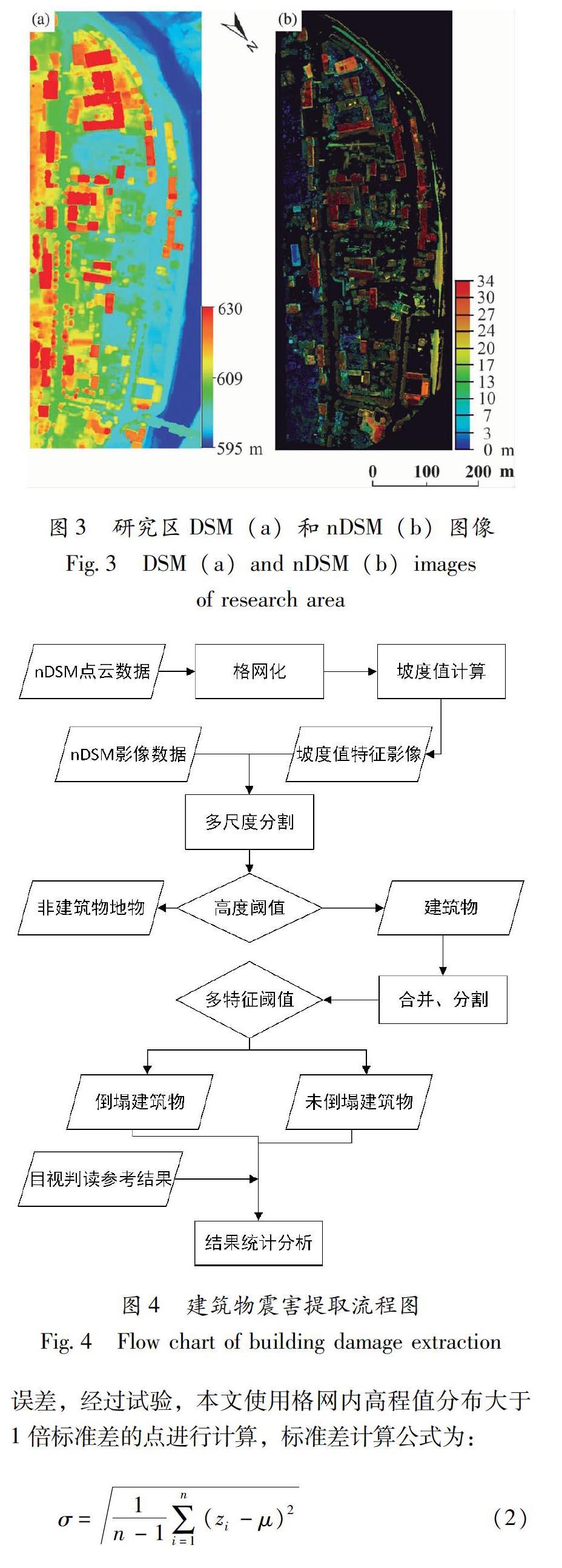
由點云產生原理可知,該數據存在密度及誤差分布不均勻的缺點(馮帥,2014),會對建筑物坡度計算精度造成影響,故本文首先對點云數據進行高程格網化處理,然后計算坡度特征,實驗流程如圖4所示。
2.2.1 點云格網化
使用二維平面網格對點云進行劃分。由于該點云含有大量建筑物立面點,而計算坡度只需建筑物頂部點云信息,使用網格均值作為計算值往往導致計算點平面位置和高程值不準確,為了減少此類
式中:n為該格網內的點數;μ為網格內點的平均值。
截取建筑物邊緣點云進行實驗,圖5為0.5×0.5 m格網計算結果。從圖中可以看出,使用標準差處理后的格網點云計算出的高程值比使用格網中所有點云平均值的計算結果更加準確。
2.2.2 坡度值計算
完好建筑物屋頂相鄰點云間的坡度具有規律性,建筑物倒塌后,物體高度分布不一,點云分布較為散亂,坡度值也會隨之變化,利用這一特征可以進行倒塌和未倒塌建筑物的區分。
通過搜索查詢與目標點平面距離最近的點進行坡度值計算:
2.2.3 影像分割
本文主要借助影像處理軟件-eCongnition的多尺度分割功能,使用nDSM特征數據進行分割。設置光譜異質性權重為0.9,形狀光滑度權重為0.5。通過對比多次不同尺度參數效果,最終選擇200作為分割尺度,分割效果如圖6所示。從圖中可以看出,建筑物可以較為完整地被分割出,但是屋頂會有部分細碎對象,分析原因是屋頂有部分綠色植物被去除。
2.2.4 建筑物震害提取
前期處理已經得到研究區nDSM影像,根據研究區特點,設置nDSM高度值大于1.5 m時,可區分道路、裸露土地等地物,剩下的為倒塌和未倒塌建筑物。再使用對象的坡度標準差(式4)和形狀密度(式5)參數對倒塌、未倒塌建筑進行區分。
式中:n為對象像元數;Ci為對象第i個像元的坡度值;C為該對象的坡度平均值。
式中:n為對象像元數;Var(X),Var(Y) 為對象所有像素x,y坐標的方差。
經過多次試驗,坡度標準差閾值取3.5,形狀密度參數取2。對結果進行相鄰類別對象合并,分類結果如圖7所示。
本文研究以目視解譯結果為參考(圖7a),不考慮目視解譯誤差。使用研究區DOM數據,結合建筑物nDSM和坡度影像的特征值,使用面向對象方法進行建筑物震害提取的結果如圖7b所示。
2.2.5 結果分析
由于DOM影像空間分辨率較高,目視解譯精度得到極大提升。本文以目視解譯結果為參考,對分類提取結果進行分析,具體結果如表1所示。
通過計算得到該分類結果的Kappa系數為0.67,總體分類精度為0.83,與使用單一DOM數據進行非監督分類方法相比,該分類方法的精度有所提升。
3 結論與討論
本文通過對無人機點云數據的處理,得到建筑物的高度和屋頂坡度特征,使用該特征輔助研究區DOM數據,采用面向對象的方法對建筑物震害進行提取,得到較好的建筑物震害提取精度。本文所用方法解決了傳統方法只使用單一DOM影像而無法利用建筑物三維信息進行震害提取的不足,同時在一定程度上解決了LiDAR點云與DOM影像配準的問題。由于本文在數據獲取時缺少控制點測量,故沒有對點云數據及高程、坡度計算值進行精度驗證。但從實驗結果來看,使用無人機獲取災區高分辨率遙感影像數據和三維信息輔助DOM數據進行建筑物震害提取的方法,不僅大大提升了災情信息獲取的速度,還進一步提升了應急現場的災害評估精度,可為應急救援、決策指揮、災害評估等提供更加快速、可靠的數據支撐。
中國地震局地震預測研究所袁小祥為本研究數據獲取方面給予了極大幫助,在此表示衷心感謝。
參考文獻:
蔡銀橋,毛政元.2007.基于多特征對象的高分辨率遙感影像分類方法及其應用[J].國土資源遙感,(1):77-81.
陳晉,習聰望,陳文凱,等.2018.基于無人機、高分衛星遙感影像的甘肅省隴南市建筑物空間化研究[J].地震研究,41(2):192-200.
馮帥.2014.影像匹配點云與機載激光點云的比較[J].地理空間信息,12(6):82-83.
黃敏兒,杜志強,朱慶,等.2014.利用像素高度圖的三維建筑物屋頂和立面提取方法[J].武漢大學學報(信息科學版),39(10):1221-1224.
黃樹松.2016.震后機載LiDAR點云建筑物震害提取因子研究[D].北京:中國地震局地震預測研究所.
柳稼航,楊建峰,魏成階,等.2004.震害信息遙感獲取技術歷史、現狀和趨勢[J].自然災害學報,13(6):46-52.
帥向華,劉欽,甄盟,等.2018.傾斜攝影技術在云南魯甸地震現場的應用研究[J].震災防御技術,13(1):158-167.
宿淵源.2015.多源遙感數據建筑物震害信息聯合分析[D].北京:中國地震局地殼應力研究所.
王金霞,竇愛霞,王曉青,等.2017.地震后機載LiDAR點云的地物區分方法研究[J].震災防御技術,12(3):677-689.
王偉,黃雯雯,鎮姣.2011.Pictometry傾斜攝影技術及其在3維城市建模中的應用[J].測繪與空間地理信息,34(3):181-183.
王曉青,竇愛霞,王龍,等.2015.2013年四川蘆山7.0級地震烈度遙感評估[J].地球物理學報,58(1):163-171.
許建華,張雪華,王曉青,等.2017.無人機傾斜攝影技術在地震烈度評估中的應用——以九寨溝7.0級地震為例[J].中國地震,33(4):655-622.
張雪華,王曉青,王金霞,等.2017.基于SfM方法生成的密集點云數據的典型建筑物分類研究[J].地震,37(3):127-137.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26