高精度光纖陀螺響應角加速度能力研究
2019-08-21 08:44:38張博文戴之光
指揮控制與仿真 2019年4期
張 昕,張博文,戴之光,朱 政
(中國船舶工業系統工程研究院,北京 100094)
海洋環境在70%左右的時間都存在大小不同的波浪,影響著艦船的運動。在通常情況下,波浪極其不規則,其波高、波長和周期都是時間的隨機函數[1]。艦船的搖擺運動也是不規則的,一般情況下可以由若干個幅度不同、頻率不等的波浪的簡諧運動疊加來描述[2]。
光纖陀螺儀作為一種重要的慣性傳感器,具有成本低、精度高等優點。光纖陀螺儀工作時通常固連到船體上,用于測量船體的姿態角和角速度,船體的搖擺運動會使光纖陀螺處于角加速運動狀態,此時Sagnac反饋相移具有復雜的形式,它將嚴重影響系統的恢復平衡時間和精度[3],因此,光纖陀螺儀能夠正常響應角加速度是一項重要的設計指標,特別是高精度光纖陀螺通常采取過調制進行噪聲抑制,會減小帶寬,進一步對光纖陀螺的響應角加速度能力產生影響,所以在光纖陀螺進行方案與基本參數設計時,需要考慮分析光纖陀螺的響應角加速度能力。本文首先對光纖陀螺角加速度響應能力進行深入的機理分析與理論推導,然后,采用光纖陀螺角加速度響應能力動態測試方法,對光纖陀螺響應角加速度值和輸出飽和時角加速度值進行實驗研究。
1 光纖陀螺響應角加速度能力機理分析
1.1 數字閉環光纖陀螺的動態數學模型
干涉型光纖陀螺由一個環形雙光束干涉儀組成。由于光纖陀螺相對慣性空間轉動,兩束相反方向傳輸的光波間產生Sagnac相移,從而,引起兩束光之間干涉光強發生變化。利用光電探測器(PIN)檢測出這一光強變化,將其轉換為電流的變化,就可以得到Sagnac相移和載體旋轉角速度[4]。
干涉型光纖陀螺前向通道中,Sagnac效應簡化為比例環節K1,探測器和前置放大器簡化為比例環節K2,調制環節綜合為一個比例滯后環節K3Z-1;在反饋通道中,D/A轉換、后置放大、相位調制表示為一個比例微分過程K4(1-Z-1),系統電路延遲用一個k階滯后環節Z-k表示,得到的簡化后閉環控制動態模型如圖1所示[5]。
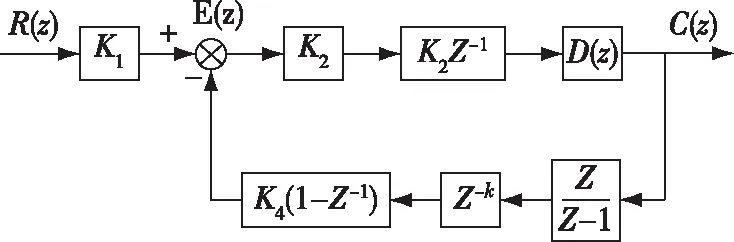
圖1 簡化后閉環控制動態模型圖
計算簡化后閉環控制動態模型可得到系統閉環傳遞函數為

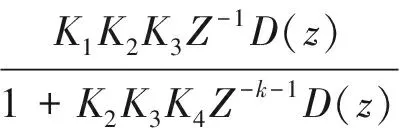
(1)
為了分析系統的動態特性,將系統傳遞函數從z域轉換到s域,表達式為
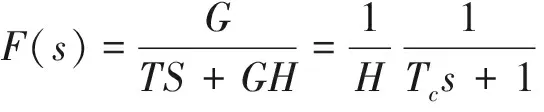
(2)
1.2 響應角加速度能力對光纖陀螺的影響
一般情況下,光纖陀螺即使存在角速度過大情況下,其輸出幅度受到影響,但不會引起光纖陀螺閉環控制回路失效,在大角速度輸入撤銷的情況下,可以恢復到正常輸出。但是高精度光纖陀螺通常采取過調制進行噪聲抑制,在干涉型光纖陀螺結構中,其輸出干涉信號信噪比SNR關系式為

(3)
其中,φm為偏置波形的相位幅值。由式(3)可見,當φm=π時,控制系統有最佳信噪比;但是,由于光電檢測器還有散粒噪聲、熱噪聲以及放大器噪聲,使得在φm=π時不可能獲得最佳結果,不過此時最佳工作點非常接近π。
可見光纖陀螺隨機游走系數與光纖陀螺偏置工作點相關,采用過調制技術的偏置工作點,可獲得很高的信噪比。高精度光纖陀螺一般采取7/8π偏置深度的過調制噪聲抑制技術,因此會減小光纖陀螺帶寬,進而響應角加速度響應能力。
光纖陀螺測量Sagnac相移范圍為±π,采用方波調制,通過對探測器輸出信號和調制信號進行相關檢測,解調出相位誤差信號,從而,解算出陀螺的角速度信息,如圖2所示,對應陀螺在靜止和轉動時的探測器輸出,陀螺在靜止時,探測器輸出為直流信號。相關檢測得到誤差信號為零,當陀螺存在檢測時,探測器輸出方波信號,通過檢測奇偶態之間的電壓值,計算得到陀螺的轉動Sagnac相移信息。

圖2 正常工作時探測器輸出圖
當對光纖陀螺施加大角速度時,光纖陀螺快速敏感到較大Sagnac相移,經過多次反饋后,解調得到的反饋相移也會和Sagnac 相移一樣大,而此時當光纖陀螺突然停止,出現大角加速度,光纖陀螺敏感到的Sagnac相移瞬間變為零,但是解調得到的反饋相移依然存在,導致光纖陀螺的探測器會敏感一個較大的光功率,光電探測器輸出飽和,如圖3所示。
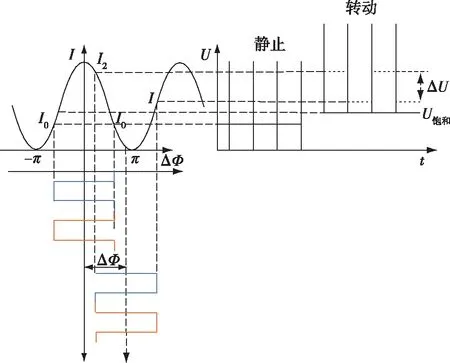
圖3 大角加速度輸入時探測器輸出圖
1.3 光纖陀螺響應角加速度能力推導分析
本文以閉環控制動態模型為基礎,采用方波調制,偏置深度為7/8π,光電探測器輸出電壓選取為Vm(t),對光纖陀螺響應角加速度能力進行推導。光電探測器輸出電壓與接收光功率關系為
E=0.46P-1.6
(4)
式中,E為探測器輸出電壓(V);P為探測器接收到的光功率(uW)。
閉環光纖陀螺探測器的響應函數如下
(5)

光纖陀螺飽和輸出時,探測器飽和電壓為V0,當探測器的工作點為Vm(t)時,

(6)

(7)

(8)
2 光纖陀螺響應角加速度能力測試方法
本文采用的光纖陀螺響應角加速度能力測試方法是基于光纖陀螺在實際應用中載體搖擺狀態的特點,利用三軸測試轉臺模擬載體,提供光纖陀螺在搖擺狀態下的輸入角速度與角加速度,測試轉臺的機械臺體如圖4所示。實驗測試時把光纖陀螺和加速度計安裝在機械臺體上,由控制機柜控制機械臺體運動,光纖陀螺角加速度能力測試系統如圖5所示。

圖4 三軸測試轉臺實物圖
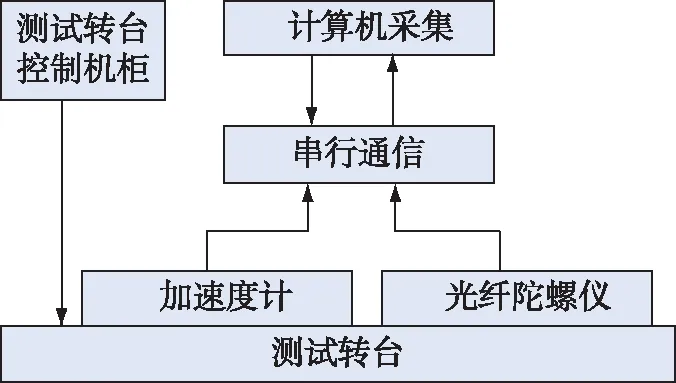
圖5 測試系統示意圖
選用實驗用高精度光纖陀螺開展動態測試實驗,將光纖陀螺儀和加速度計通過夾具安裝到測試轉臺,光纖陀螺的敏感軸垂直于測試轉臺[6],測試轉臺控制機柜設定搖擺頻率f值見表1。

表1 轉臺測試頻率
啟動測試轉臺,依次按照上述表1工作頻率進行動態測試[7],采用串行通信模塊采集光纖陀螺儀的輸出值,串行通信模塊采樣周期為2 ms,光纖陀螺儀輸出為[8]
Ωf(t)=Ωi·sin[2πfi(t-t0)]
(9)
式中,ΩA為角振動幅度,Ωi為輸出信號的幅度。
加速度計的輸出可近似表示為測試轉臺的角速度,即光纖陀螺的輸入
Ω(t)=ΩAi·sin(2πfit)
(10)
式中,Ωi為光纖陀螺輸出信號的幅度,t0為延遲時間。
由上式可得陀螺儀在頻率fi,下的幅值增益Gi如下
(11)
測試轉臺的工作頻率點選取為10 Hz,將測試轉臺的擺動幅值從0.05°開始,以0.05°的幅度依次增加,并將擺動幅值改變后的測試數據代替原始數據,計算得出光纖陀螺在頻率為10 Hz時的幅值響應情況,測試得到當幅值增加到0.405°時,光纖陀螺的幅值響應正好衰減為-3 dB,此時光纖陀螺幅頻曲線如圖6所示。
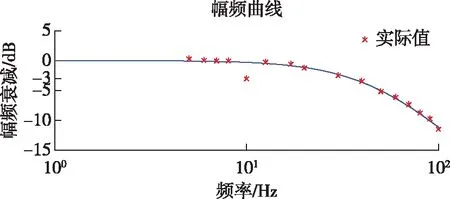
圖6 光纖陀螺幅頻曲線(改變10 Hz的幅值)
轉臺的搖擺運動可以用正弦形式來描述,光纖陀螺角位置表達式為
P=A·sin(2πft)
(12)
對上式求導得到角速度表達式
w=2πft·A·cos(2πft)
(13)
再次求導,得到角加速度表達式
α=(2πft)2·A·sin(2πft)
(14)
由上式可得到光纖陀螺的抗角加速度值為
α=Aω2
(15)
式中,α為光纖陀螺抗角加速度值,ω=2πf為擺動圓頻率,A為擺動幅值。
光纖陀螺在頻率為10 Hz時,振幅為0.405°輸出波形,此時幅值衰減至-3 dB,光纖陀螺輸出形式為正弦函數,即光纖陀螺還能夠響應測試轉臺的輸入,但是輸出幅值已經有所衰減,如圖7所示。由測試結果,以及根據式(15)可得出光纖陀螺抗角加速度值約為1 598°/s2。
為確認本型光纖陀螺所能響應的最大角加速度,將測試轉臺在10 Hz工作頻率下的幅值繼續增加,直到光電探測器輸出飽和,光纖陀螺無法正確響應測試轉臺的輸入,輸出呈積分形式,最后穩定在某一值,如圖8所示。得到此時的幅值約為0.65°,由測試結果,根據式(15)可得到光纖陀螺儀的最大角加速度響應能力約為2 566°/s2。
由上述實驗結果可知,當船體的搖擺運動使得實驗用高精度光纖陀螺敏感的角加速度值小于2 566°/s2時,無論光纖陀螺敏感的角速度多大,光纖陀螺閉環控制系統不會出現失效,當實驗用高精度光纖陀螺敏感的角加速度值大于等于2 566°/s2時,光電探測器輸出飽和,光纖陀螺無法正確響應測試轉臺的輸入。
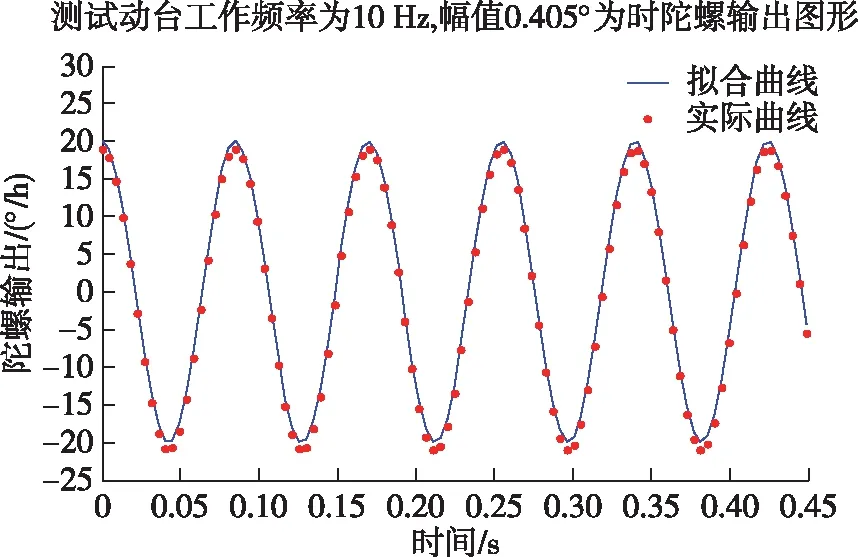
圖7 頻率10 Hz,振幅0.405°時輸出
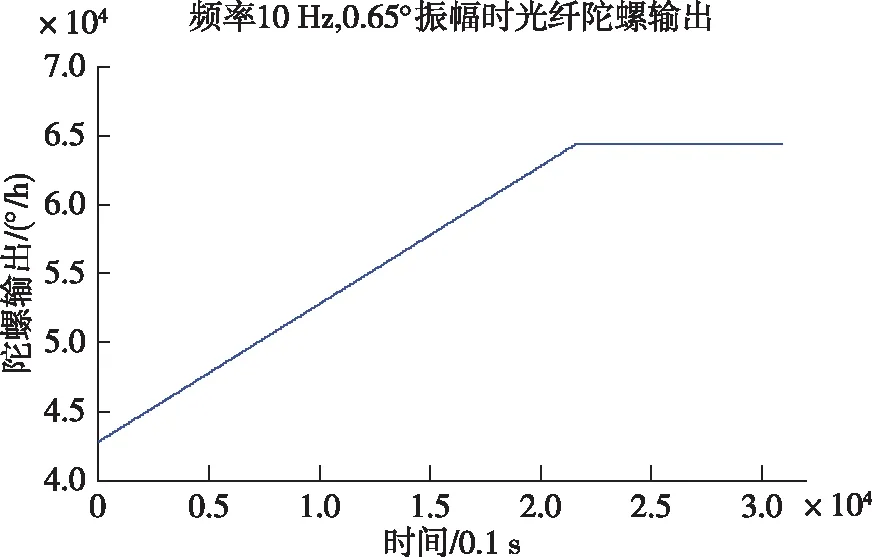
圖8 頻率10 Hz,振幅0.65°時輸出
為了驗證不同光纖陀螺輸出飽和時角加速度值是否具有一致性,采用兩只相同參數的光纖陀螺開展上述性能測試,具體結果見表2。

表2 兩只相同參數的光纖陀螺響應角加速度測試結果
由表2可知,測試的兩只光纖陀螺響應角加速度和輸出飽和時角加速度兩項設計指標具有一致性,不同光纖陀螺測試結果沒有明顯差異。
3 結束語