基于改進(jìn)MPS方法的三維時(shí)域水彈性計(jì)算模型
2019-08-21 04:05:12尹恒輝張桂勇
船舶力學(xué) 2019年8期
孫 哲,尹恒輝,張桂勇,3,4,宗 智,3,4
(1.大連理工大學(xué)船舶工程學(xué)院 遼寧省深海浮動(dòng)結(jié)構(gòu)工程實(shí)驗(yàn)室,遼寧 大連116024;2.大連中遠(yuǎn)海運(yùn)重工有限公司,遼寧 大連116113;3.大連理工大學(xué) 工業(yè)裝備與結(jié)構(gòu)分析國(guó)家重點(diǎn)實(shí)驗(yàn)室,遼寧 大連116024;4.高新船舶與深海開發(fā)裝備協(xié)同創(chuàng)新中心,上海200240)
0 引 言
與傳統(tǒng)的基于網(wǎng)格的CFD方法相比,粒子類方法以其拉格朗日形式的時(shí)間步進(jìn)格式和無網(wǎng)格的空間離散方法,為處理大自由液面變形問題提供了一個(gè)更加有效的計(jì)算模型。MPS(Moving Particle Semi-implicit)方法[1]和SPH(Smoothed Particle Hydrodynamics)方法[2]都是主流的粒子類方法。其中MPS方法最先基于投影法(Projection Method)[3]提出所謂半隱式求解格式,即通過求解壓力Poisson方程來實(shí)現(xiàn)壓力和速度的解耦,而非像在傳統(tǒng)弱可壓SPH(Weakly Compressible SPH)中通過狀態(tài)方程來基于密度變化求解壓力。這種半隱式求解方式可以使得時(shí)間步長(zhǎng)取得更大,并且能夠更好地保證不可壓縮性。當(dāng)然,原始MPS方法也和SPH一樣存在著壓力計(jì)算有較大非物理性震蕩問題,因此許多研究者對(duì)MPS進(jìn)行了改進(jìn)[4-8],取得了較好的效果。
另一方面,由于現(xiàn)代船舶的大型化、高運(yùn)營(yíng)速度等發(fā)展趨勢(shì),其固有頻率越來越接近于波浪作用的遭遇頻率,且受到波浪砰擊、甲板上浪等強(qiáng)非線性瞬態(tài)載荷的作用更加頻繁,會(huì)發(fā)生所謂砰擊顫振(Whipping)和波擊振蕩(Springing)等現(xiàn)象,嚴(yán)重地影響船舶的總體和疲勞強(qiáng)度[9]。這就要求在對(duì)結(jié)構(gòu)強(qiáng)度分析時(shí)采用水彈性方法,尤其是強(qiáng)非線性的時(shí)域水彈性計(jì)算是較為必要的。傳統(tǒng)的基于勢(shì)流的水彈性方法已經(jīng)形成了節(jié)點(diǎn)多、分支系的理論體系[10]。然而,在計(jì)及上述設(shè)計(jì)大自由面變形的強(qiáng)非線性時(shí)域水彈性計(jì)算方面,勢(shì)流理論還存在缺陷。事實(shí)上正如Hirdaris[11]在其綜述文章中所說的那樣,部分或全部使用CFD方法進(jìn)行水彈性計(jì)算將是終極目標(biāo)。本文將針對(duì)基于MPS方法的時(shí)域水彈性模型進(jìn)行探討。
本文首先闡述改進(jìn)MPS模型及其三維拓展,主要是三維情況下的自由面粒子搜索算法;其次將簡(jiǎn)要介紹基于拉格朗日方程的耦合剛體和彈性模態(tài)的結(jié)構(gòu)動(dòng)力響應(yīng)模型;最后,通過對(duì)三維潰壩和三維浮梁與潰壩問題的相互作用問題的模擬來驗(yàn)證模型的有效性。
1 改進(jìn)的MPS方法
本節(jié)將對(duì)作者所發(fā)展的改進(jìn)MPS方法進(jìn)行簡(jiǎn)要闡述,詳細(xì)算法流程參見文獻(xiàn)[6,12]。其中將重點(diǎn)介紹本文對(duì)該模型的三維拓展,即自由面粒子搜索算法。
1.1 半隱式求解格式
由于所研究問題粘性影響很小,因此流體部分控制方程為無粘不可壓流體NS方程和連續(xù)性方程,即:

式中:u,p和ρ分別為流體速度、壓強(qiáng)和密度;g為重力加速度矢量形式。
速度和壓強(qiáng)采用如下的投影法(Projection Method)來解耦:
首先,不計(jì)壓強(qiáng),計(jì)算一個(gè)中間速度和對(duì)應(yīng)的中間位置,并將流體質(zhì)點(diǎn)步進(jìn)到該位置,即:

其次,在改進(jìn)MPS方法中,根據(jù)連續(xù)性方程構(gòu)造如下形式的壓力Poisson方程:

方程中n0和nn稱為“粒子密度”,其定義由(11)式給出,下標(biāo)0和n分別表示初始和上一時(shí)刻對(duì)應(yīng)的狀態(tài)。(3)式中系數(shù)α起到提高壓強(qiáng)計(jì)算穩(wěn)定性和準(zhǔn)確度的作用,其定義如下:

從上式可知,其計(jì)算不含人為的經(jīng)驗(yàn)假設(shè)。最終,粒子速度和位置可由計(jì)算得到的下一時(shí)刻的壓強(qiáng)來更新如下:

為了進(jìn)一步提高算法的穩(wěn)定性和精度,在改進(jìn)MPS方法中,粒子位置將根據(jù)分布情況被重新排布,具體細(xì)節(jié)可參見文獻(xiàn)[6]。
1.2 算子離散方法
在MPS方法中,梯度、散度和拉普拉斯算子是通過一種加權(quán)平均的形式離散,其具體格式如下:

式中:φ和φ分別表示任意標(biāo)量和矢量;d表示空間維度(即2或3維);M表示在以中心粒子為圓心的圓形支撐域內(nèi)的粒子數(shù)目;對(duì)于梯度和散度算子,圓半徑re=2.1r0,對(duì)于拉普拉斯算子re=4.0r0,其中r0為粒子初始間距;w(rij)是權(quán)函數(shù);λ是與權(quán)函數(shù)相關(guān)的參數(shù)。它們的定義如下:

前述的粒子密度定義如下:

由于粒子位置處于時(shí)刻變動(dòng)過程中,因此需要每個(gè)時(shí)間步搜索更新各個(gè)粒子的支持域內(nèi)粒子數(shù)目,在改進(jìn)MPS法中進(jìn)一步發(fā)展了一種基于背景規(guī)則網(wǎng)格(Cell-link)的搜索方式,所需搜索面積比原方法減少6.5/9。
1.3 壓力Poisson方程邊界條件
為求解壓力Poisson方程(即(3)式),需施加兩類邊界條件,即固體邊界條件和自由面邊界條件。
(a)固體邊界條件
在改進(jìn)MPS方法中,固體邊界上的粒子將被施加如下的Neumann邊界條件:

(b)自由面邊界條件
求解Poisson方程(即(3)式)需在自由液面處施加壓力為零的邊界條件,因此需搜索并確定自由液面粒子的位置。在作者所發(fā)展的二維改進(jìn)MPS算法中,自由液面粒子搜索采用對(duì)Koh等人[5]提出模型的改進(jìn)形式,即對(duì)每一個(gè)粒子分配一個(gè)圓環(huán),如果圓環(huán)上均布的360個(gè)點(diǎn)被周圍粒子的圓環(huán)覆蓋,則認(rèn)為該粒子為內(nèi)部粒子,否則為自由液面粒子。本文中進(jìn)一步拓展該模型至三維情形,自由液面粒子判斷分為兩部分:
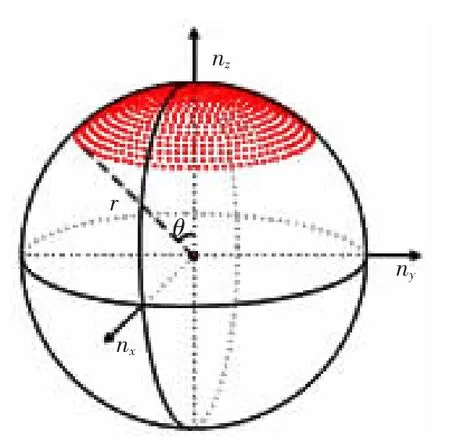
圖1 三維自由液面粒子判斷示意圖Fig.1 Sketch of the 3D free surface identification
首先,按照每個(gè)粒子圓形支撐域內(nèi)的粒子數(shù)目Np進(jìn)行第一輪判斷:

式中:Np0為均勻分布的情況下,典型內(nèi)部粒子的支撐域內(nèi)鄰近粒子數(shù)目,取為32;β3d為調(diào)節(jié)系數(shù),本文中取為0.96。當(dāng)(13)式滿足時(shí),該粒子被初步判斷為自由面粒子,否則為內(nèi)部粒子。
其次,為進(jìn)一步修正上一步中被誤判的粒子,為上一步中判斷出的自由液面粒子及其周圍粒子分別分配一個(gè)球面,并根據(jù)周圍粒子分布疏密程度,用權(quán)函數(shù)加權(quán)平均形式確定球面的法向方向(如圖1中的nz方向)。之后,以與法線方向夾角為θ的半徑,在球面上截取一個(gè)如圖1中紅色區(qū)域所示的圓形三維曲面,并在其上均布若干節(jié)點(diǎn),如果這些節(jié)點(diǎn)全部被周圍粒子的球面覆蓋,則認(rèn)為該中心粒子為內(nèi)部粒子,否則為自由面粒子。
這樣的搜索方式的好處是結(jié)合了粒子數(shù)判別法的高效率和基于幾何分布判別法的準(zhǔn)確性,下面將給出的例子證明了所提出模型的有效性。
2 時(shí)域耦合剛體和彈性模態(tài)計(jì)算模型
對(duì)于在波浪中運(yùn)動(dòng)船舶來說,最為重要的變形就是縱向彎曲變形,其核心是一個(gè)二維變形過程(縱向剖面內(nèi))。作者基于拉格朗日方程,提出了一個(gè)耦合剛性和彈性模態(tài)的結(jié)構(gòu)響應(yīng)二維計(jì)算模型[13],可用于在時(shí)域高效地計(jì)算大剛體位移疊加相對(duì)較小彈性變形的典型船體運(yùn)動(dòng)情形。下面簡(jiǎn)要描述該模型。
2.1 運(yùn)動(dòng)描述
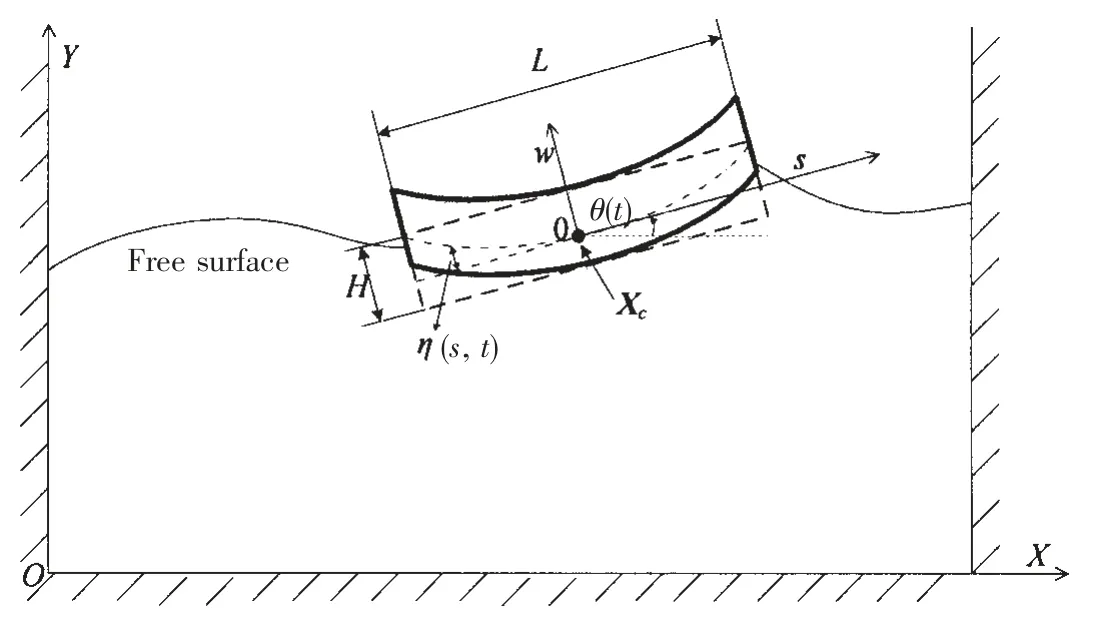
圖2 二維彈性浮梁模型示意圖Fig.2 Sketch of the 2D floating beam
根據(jù)上述的坐標(biāo)系統(tǒng),梁上任一點(diǎn)的位置X可由下式計(jì)算:

式中:R為用于貼體坐標(biāo)系和全局坐標(biāo)系之間轉(zhuǎn)換的旋轉(zhuǎn)矩陣;ξ為變形后的點(diǎn)在貼體坐標(biāo)系中的表達(dá)式。R和ξ分別由(15)式和(16)式定義:

式中w為梁未變形時(shí)任意一點(diǎn)對(duì)應(yīng)的貼體坐標(biāo)系中O-w軸方向的坐標(biāo)值。梁上任一點(diǎn)的速度和加速度可由下式求得:

2.2 模態(tài)疊加
應(yīng)用模態(tài)疊加理論,將撓度部分表示成如下形式:

式中Φ和q為各階模態(tài)函數(shù)向量以及對(duì)應(yīng)的廣義坐標(biāo)向量,它們的定義如下:

通過這種模態(tài)展開的形式實(shí)現(xiàn)了時(shí)間和空間的變量分離。對(duì)(19)式求一階和二階時(shí)間導(dǎo)數(shù)得到:

模態(tài)函數(shù)之間滿足如下的正交關(guān)系:

式中:ωk表示梁的第k階振動(dòng)固有圓頻率;E,ρl和J分別是材料楊氏模量、線密度和截面二階慣性矩;I是n階單位矩陣;n是所取得彈性模態(tài)數(shù)量。式中的線積分是沿著梁的中心線進(jìn)行的。在本文的研究中,應(yīng)用的是自由-自由梁的模態(tài)函數(shù):

式中:M為梁的總質(zhì)量;a=L/2為梁的長(zhǎng)度一半值;μk為下式的正實(shí)數(shù)特征值:

前三階取值為:μ1=2.365 0,μ2=3.926 6,μ3=5.497 8。
2.3 基于拉格朗日方程的模型
根據(jù)上述運(yùn)動(dòng)描述模型,梁的變形可由以下廣義位置變量D和對(duì)應(yīng)的廣義力Q描述:

式中廣義力變量QXcR,Qθ和Qqi是對(duì)應(yīng)的剛體(即Xc和θ)和彈性(即q)部分的非保守力,可由(30)~(32)式計(jì)算:

式中:n表示結(jié)構(gòu)表面任意一點(diǎn)的外法線方向向量(指向結(jié)構(gòu)內(nèi)部);ew表示貼體坐標(biāo)系中O-w軸方向的單位向量。根據(jù)拉格朗日方程,結(jié)構(gòu)的動(dòng)力響應(yīng)可表示為:

式中T和V分別為結(jié)構(gòu)的動(dòng)能和勢(shì)能:

將結(jié)構(gòu)動(dòng)能((36)式)和勢(shì)能((37)式)代入拉格朗日方程((33)~(35)式)中,并取前三階彈性模態(tài),化簡(jiǎn)得如下浮梁在波浪中結(jié)構(gòu)動(dòng)態(tài)響應(yīng)的控制方程:
式中:Iin為梁圍繞其質(zhì)心的二階轉(zhuǎn)動(dòng)慣性矩(非截面慣性矩);ψ0i和ψ1i(i=1,2,…n)定義如下:

(38)~(43)式所組成的非線性二階微分方程組中考慮了剛體和彈性模態(tài)的相互影響,即交叉項(xiàng)。該方程組將通過Newmark方法[14]降階為一階線性方程組后由Newton-Raphson方法來進(jìn)行求解。流固耦合部分采用基于Aitken松弛模型的迭代方式求解,具體細(xì)節(jié)可參見文獻(xiàn)[13]。
3 計(jì)算結(jié)果及分析
3.1 改進(jìn)MPS模型驗(yàn)證計(jì)算—3D潰壩問題
為檢驗(yàn)三維改進(jìn)MPS模型的有效性,本文對(duì)圖3所示的三維潰壩與方形平臺(tái)相互作用模型進(jìn)行了模擬,這可以認(rèn)為是甲板上浪問題的近似模型。若干水位(H1-H4)和壓力(p1-p8)傳感器被布置在了如圖3中所示的水池和和池中的方形平臺(tái)上。模擬中采用的初始粒子間距為0.015 m,共308 460個(gè)粒子,其中200 244個(gè)流體粒子。時(shí)間步長(zhǎng)根據(jù)CFL條件動(dòng)態(tài)調(diào)整,初始值為0.002 s。
典型位置處的水位和壓力監(jiān)測(cè)曲線與實(shí)驗(yàn)和商業(yè)軟件ComFLOW計(jì)算結(jié)果[15]的對(duì)比如圖4所示,其中圖4(a)~(b)表示圖3中H2和H4位置處的水位時(shí)程曲線,圖4(c)~(d)表示圖3中p3和p7位置處的壓力時(shí)程曲線。從圖中結(jié)果可以看出,改進(jìn)的三維MPS計(jì)算結(jié)果與實(shí)驗(yàn)結(jié)果吻合良好,且并未出現(xiàn)ComFLOW計(jì)算結(jié)果中的奇異值現(xiàn)象(約t=1.4 s處)。
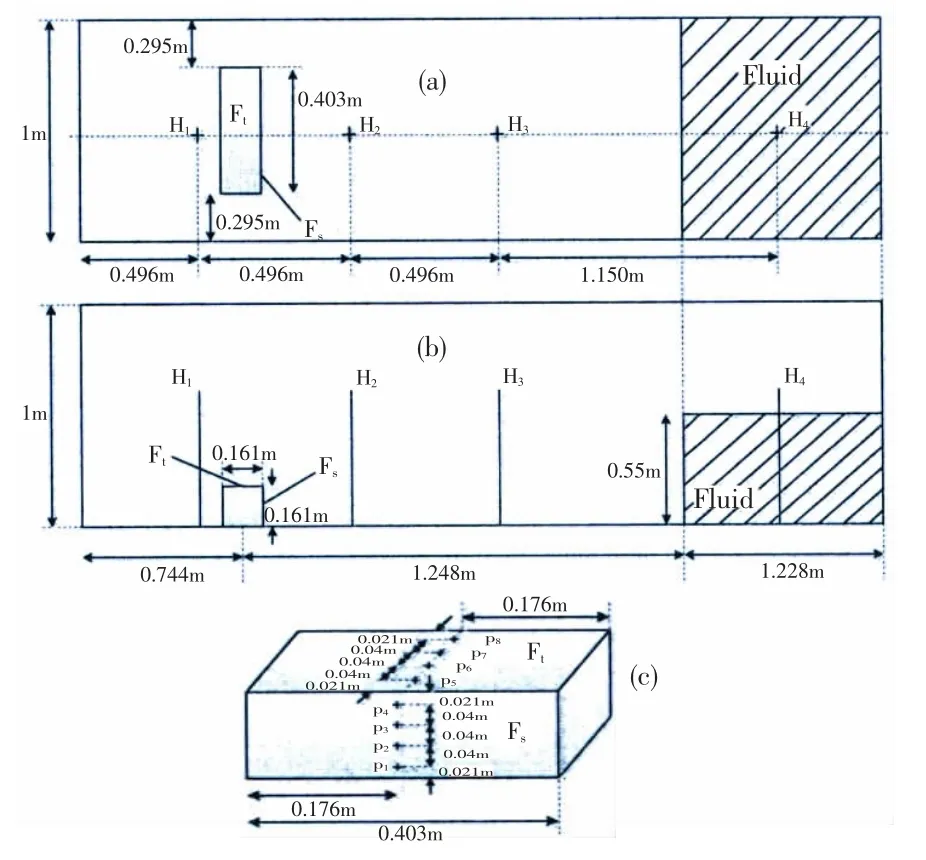
圖3 三維潰壩模型示意圖Fig.3 Sketch of the 3D dam-break model
圖5給出了自由面形態(tài)和實(shí)驗(yàn)以及商業(yè)軟件ComFLOW計(jì)算結(jié)果的對(duì)比,左側(cè)MPS結(jié)果中僅用紅色標(biāo)記出自由面粒子的位置,可以看出在劇烈的變形過程中并未出現(xiàn)粒子誤判現(xiàn)象,證明了所發(fā)展的三維自由面粒檢測(cè)方法是有效的。兩個(gè)典型的自由面形態(tài)與實(shí)驗(yàn)及ComFLOW結(jié)果相比吻合良好。
3.2 3D潰壩沖擊彈性浮梁計(jì)算
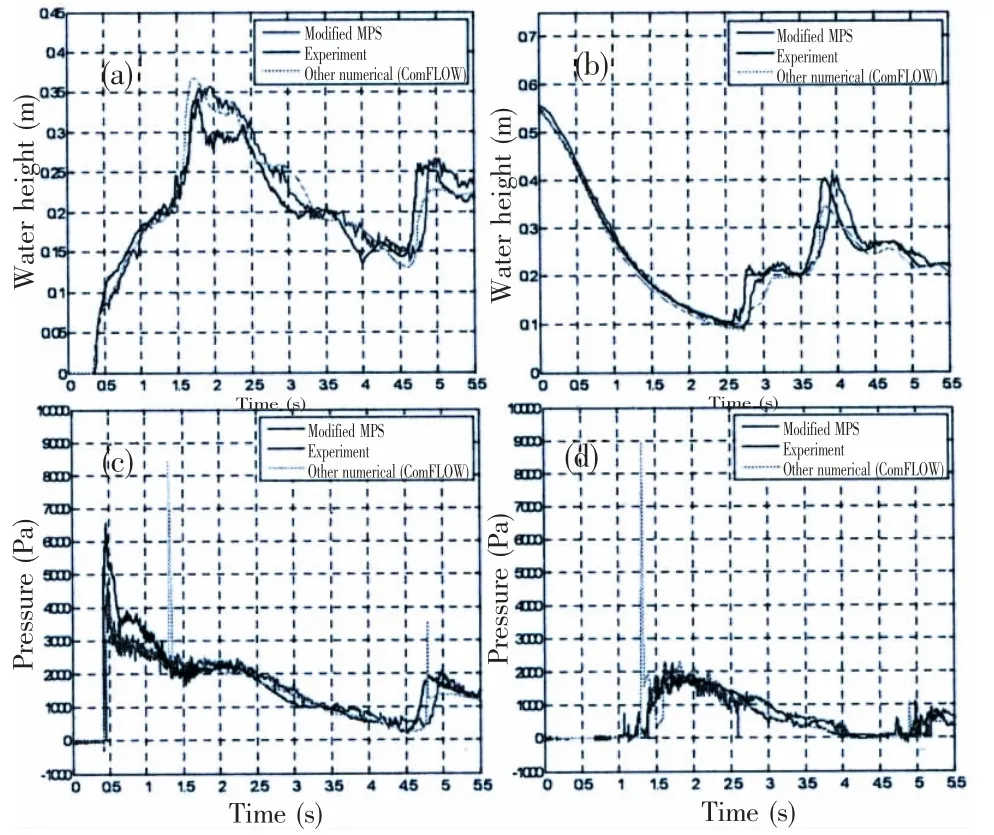
圖4 三維潰壩典型位置處水位和壓力時(shí)程曲線(上:水位;下:壓力)Fig.4 Time history of water level and pressure(Up:Water level;Bottom:Pressure)
本節(jié)將對(duì)一個(gè)二維變形的浮梁在三維潰壩沖擊作用下的整體動(dòng)力響應(yīng)進(jìn)行計(jì)算,來驗(yàn)證本文給出的流固耦合模型對(duì)此類強(qiáng)非線性時(shí)域水彈性問題的有效性。計(jì)算模型布置如圖6所示。計(jì)算中所用的初始粒子間距為0.02 m,共194 360個(gè)粒子,其中流體粒子數(shù)為126 288。時(shí)間步長(zhǎng)同樣以CFL為限制條件動(dòng)態(tài)控制,初始值是0.002 s。為驗(yàn)證模型在處理較大的彈性變形的有效性,方梁的剛度取得很小,第二節(jié)中的結(jié)構(gòu)計(jì)算模型的參數(shù)EJ=4.5 N/m2,線密度ρl=36 kg/m,對(duì)應(yīng)的梁的前三階固有圓頻率為ω1=7.910 0 rad/s,ω2=21.804 6 rad/s,ω3=42.745 7 rad/s。

圖5 三維潰壩問題自由液面形態(tài)對(duì)比(上:t=0.4 s;下:t=0.56 s)Fig.5 Free surface profiles comparison(Up:t=0.4 s;Bottom:t=0.56 s)
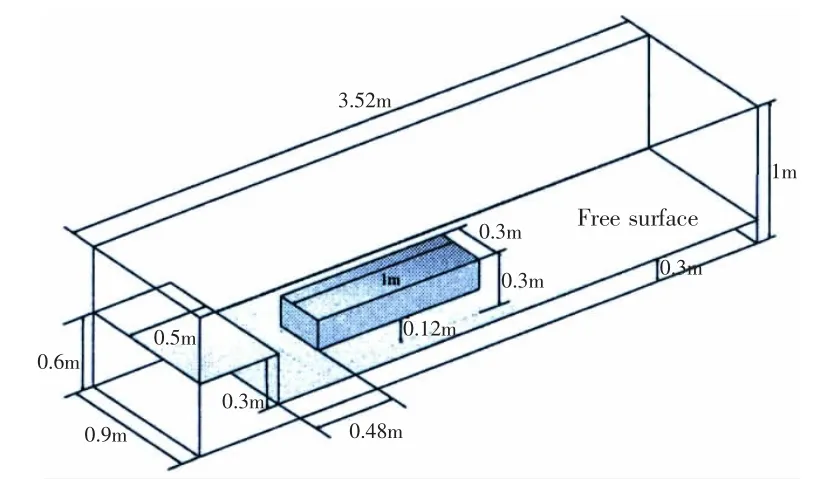
圖6 三維潰壩沖擊浮梁模型示意圖Fig.6 Sketch of the 3D dam-break impacting floating beam model

圖7 典型時(shí)刻自由面形態(tài)及浮梁變形((a)t=0.1 s;(b)t=0.418 s;(c)t=0.864 s;(d)t=1.282 s)Fig.7 Free surface profiles and beam deflections at typical time instants((a)t=0.1 s;(b)t=0.418 s;(c)t=0.864 s;(d)t=1.282 s)
從圖7中可以看出,在若干典型時(shí)刻的自由面粒子被正確地檢出,并且梁變形和流體的形態(tài)也是符合物理實(shí)際的。進(jìn)一步的系統(tǒng)化數(shù)值實(shí)驗(yàn)將在下一步的工作中開展,以全面驗(yàn)證模型的準(zhǔn)確性和可靠性。
4 結(jié) 論
本文首先將作者發(fā)展的二維改進(jìn)MPS方法進(jìn)行了三維拓展,主要是三維自由液面粒子的高效和準(zhǔn)確檢索模型。為驗(yàn)證模型的準(zhǔn)確性,對(duì)三維潰壩與平臺(tái)的沖擊問題進(jìn)行了模擬。數(shù)值計(jì)算結(jié)果與實(shí)驗(yàn)結(jié)果和其他數(shù)值模型吻合得較好,證明了所發(fā)展模型的有效性。在此基礎(chǔ)上,應(yīng)用作者所發(fā)展的耦合剛體和彈性模態(tài)的時(shí)域計(jì)算模型,對(duì)三維潰壩沖擊彈性浮梁?jiǎn)栴}進(jìn)行了模擬,得到的結(jié)果符合物理實(shí)際。下一步的工作將針對(duì)該水彈性模型進(jìn)行系統(tǒng)的數(shù)值驗(yàn)證,以證明其在處理此類涉及強(qiáng)非線性時(shí)域水彈性問題的有效性。
猜你喜歡
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
Coco薇(2016年2期)2016-03-22 02:42:52
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39