基于四旋翼無人機的機耕農場監察裝置
2019-08-22 02:22:04劉一航鐘繼康李瀚
科技與創新 2019年15期
劉一航,鐘繼康,李瀚
基于四旋翼無人機的機耕農場監察裝置
劉一航,鐘繼康,李瀚
(武漢理工大學 機電學院,湖北 武漢 430070)
農作物在每一個生長周期內的外部形狀相對不同,并且大多數具有明顯的外部特征,因此可以較好區分農作物的生長周期。在現有較為先進的無人機航拍技術基礎上,完全可以依靠無人機對大型農場進行普查并結合圖像處理技術判斷生長階段對應性進行耕作。基于此背景,擬研究一套基于四旋翼無人機的機耕農場管理系統,依靠四旋翼無人機對農場進行航拍,對航拍獲得的圖像進行處理,從而判斷生長周期,并且判斷具體屬于哪一塊土地,有針對性地進行耕作。
無人機;機耕農場;監察;視覺識別
1 硬件部分
擬采用大疆無人機的大疆御Air無人機,該款無人機航程30 min,運行速度約為30 km/h(最高運行速度可達60 km/h)。航拍穩定極高,像素可達3 200萬,并且拍照廣角為180°,方便采集信息。
無人機最大作用距離為4 km(即最大巡航路徑為25 km),并且擁有在4 km內傳輸720 p的實時圖傳能力,理論上在不對農場環境做大幅度改造的情況下僅依靠2.4/5.8 GHz信號傳輸的最大半徑可達4 km,面積可達50 km2的區域的圖像拍攝。并且大疆御Air可以依靠Wi-Fi信號傳輸進行控制,因此在中間增加中繼增強信號增大其工作范圍。
2 軟件部分
軟件部分采用大疆公司的外部開發SDK為基礎進行開發,將原有的RGB數學模型轉化為較為方便處理的HSV數學模型,最終采用HSV數學模型得到的數值對所得到的圖片進行比對分析。
直接拍照得到的照片是基于RGB模型的像素點的圖形,每一點都由RGB三個數值存儲,信息存儲量大,處理三維數組運算相對較慢。并且RGB顏色空間是不均勻的顏色空間,兩個顏色之間的知覺差異與空間中兩點間的歐氏距離不成線性比例,而且RGB值之間的相關性很高。同一顏色屬性在不同條件下RGB值很分散,識別某種特別顏色時,很難確定其閾值和其在顏色傳統的顏色相似度計算方法空間中的分布范圍,不利于目標物體的識別,因此將其轉化為較為簡單的HSV模型。程序運行過程如圖1所示。
后期對農場圖像進行識別時,選擇最為明顯的小麥成熟為例子講述其識別過程。小麥成熟前為青色,其RGB值為0,255,255,轉化為HSV數學模型后為180,1,255。小麥成熟后為黃色,其RGB值為255,255,0,轉化為HSV數學模型后為60,1,255。其識別僅計算灰度即可,黃色與青色在HSV模型下為互補色,識別起來相對快。
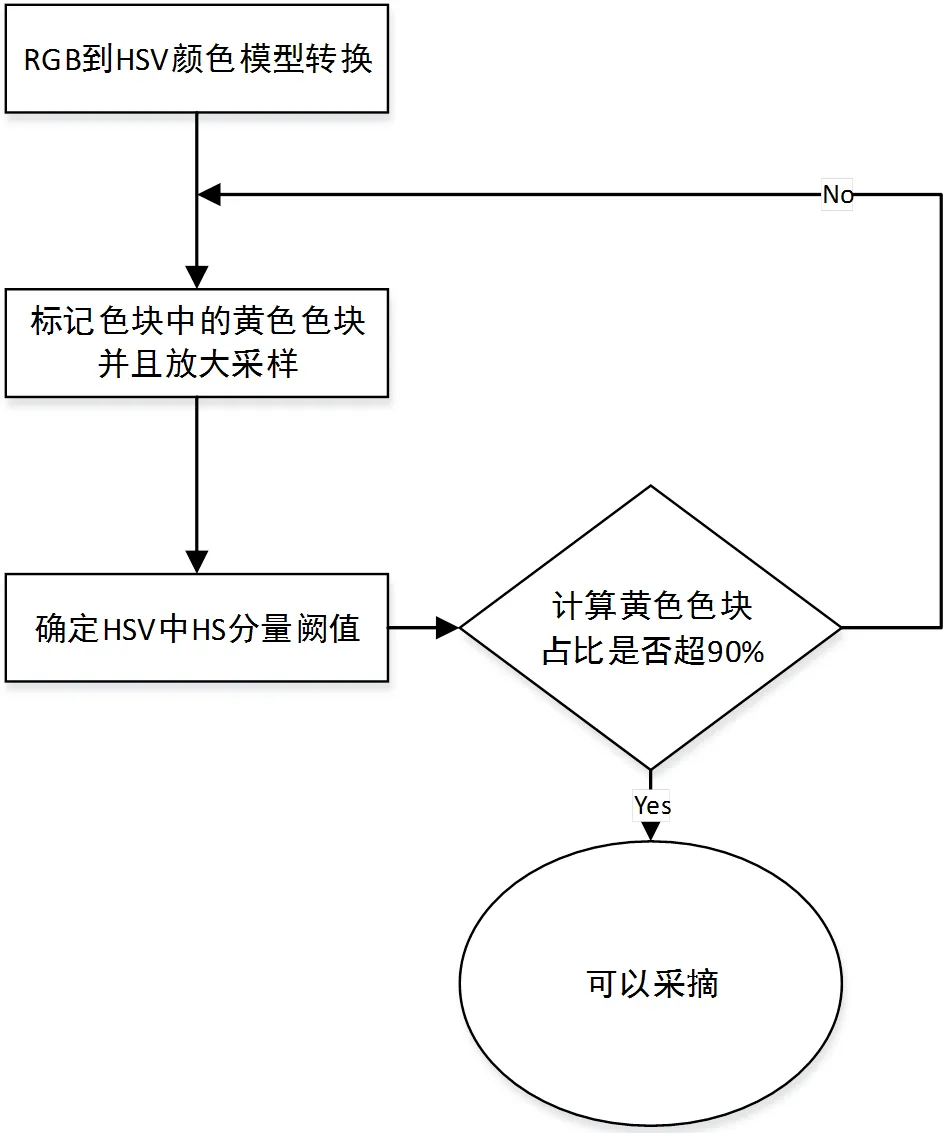
圖1 程序運行過程
在確認了黃色色塊后,軟件將進行形狀識別。圖片所拍攝的畫面承載的土地大小一定,在得到灰度圖后灰度接近60的部分采用畫圓的方法簡單畫出成熟小麥的外框區域。得到其大致成熟區域的外形后,根據圖片比例與圖形比例計算出成熟區域占據整體區域的比例,計算出比例后將會將數據上傳給上位機。使用者根據上位機所顯示的數據判斷是否應該采摘。
在實際使用中可能由于光線原因導致地面的棕色土地展現出與金黃色類似的顏色狀態,因此為了操作者在上位機可以根據該片區土地的實際情況(是否存在大面積撂荒)選擇是否對該塊土地進行反復調查。選擇無人機的自我路徑規劃可以在一個正方形的四個角對一塊土地進行反復校準,對該塊土地的識別采用相對較為簡單的識別方式,減少識別工作量提升辨別速度。
3 工作方式
以一個300 hm2(3 km2)的農場為基礎進行計算,無人機每架次巡航15 km,巡航半徑4 km。大型農場土地相對較為平整,土地相對較為完整。假設其為一個長2 km、寬1.5 km的土地,操作者可以在任意一點釋放無人機,無人機的定位系統將會在該點建立起坐標系,并且無人機接入網絡依靠地圖導航確定無人機位置,并在坐標系上建立一個動態的運動模型。
在人工確認作業區域全部在信號作用范圍內與航程路線規劃內情況下,無人機會隨之建立起一個動態的運動模型確定其所處的位置,對應性地根據需要選擇需要探測的土地(不同種類作物成熟期不相同)。
工人在上位機規劃好對應的行程,上位機把對應的探測區域展示給使用者,并且使用者需要確認行程上無大塊土地撂荒。如果存在土地撂荒,使用者將需要在規劃行程時將撂荒區域標明。工作流程如圖2所示。

圖2 工作流程
無人機飛行過程中不斷進行圖像獲取,圖像處理軟件根據對應的RGB轉HSV算法確定黃色色塊比例以及是否撂荒。無人機將自身的位置信息與圖片黃色色塊比例上傳給上位機,工人根據實際情況判斷是否采摘。
4 項目的創新之處
項目的創新之處有以下幾方面:①采用無人機高速對農場進行巡回監察并且適應性強;②采用圖像處理技術根據航拍結果判斷生長周期并且確定自身位置;③多點位多照片提升其圖像識別精確度。
5 項目的研究基礎和可行性分析
5.1 技術分析
采用圖像處理技術判斷其生長周期,現在較為通用的大疆無人機可運行30 min,行程15 km,在合理規劃路徑的基礎上,每臺無人機可以在單個班次內的監察范圍為3~4 km2。在存在電池擴容的情況下,理論上可以滿足一個家庭農場所需的監察管理需求。還可利用圖像處理技術判斷農作物相對較為明顯的生長特征(例如小麥生長期為綠色,成熟期為黃色),并傳輸數據給農場工人。
5.2 效益分析
國家統計局數據顯示,中國現有耕地20.24億畝(約為135萬平方千米),加拿大的農場與中國的國有農場相比,中國未來約有15萬~20萬個家庭農場。每一個家庭農場使用一套這樣的系統就可以滿足其的使用需求。
這套系統搭建起來需要8 000元,可以代替人工對附近的土地進行監察。無人機工作時間30 min,充電需要54 min,因此每天可飛行6~8架次,合計監控監察面積為20 km2每架每日。
按照加拿大一個獨立農場3 km2土地計算,一臺聯合收割機每日可以完成0.267~0.333 km2土地的收割,即在10~15個工作日就可以完成對農場的采收(實際工作時間可能更長),在這段時間內需要人工對可以采收的區域不斷進行確定(此工作需每日進行一次)。每名農業工人如果人工判斷是否可以采摘,判斷量單日約為0.667 km2土地,該系統相當于4~5名人力,4~5名人力(重體力勞動)半個月的工作時間工資約為10 000~13 000元。由此可得該系統在一年內就將會收回成本,并且極大提升了農業自動化程度,減少對人力的需求,同時減少這項工作可能對人的傷害。同時該系統還可提高對生長周期的判斷能力,節約更多的人力。
[1]程嘉暉.基于深度卷積神經網絡的飛行器圖像識別算法研究[D].杭州:浙江大學,2017.
[2]吳笛.基于圖像識別水稻蟲害預警系統的研究[D].長沙:湖南農業大學,2015.
[3]李妍.玉米大豆水稻圖像識別方法研究[D].大慶:黑龍江八一農墾大學,2017.
[4]胡直峰.植物圖像識別方法研究及實現[D].杭州:浙江大學,2017.
[5]陳玉輝.基于圖像識別的工業機器人軌跡規劃研究與應用[D].杭州:浙江大學,2017.
[6]張鵬.基于圖像特征提取的算法設計與應用[D].成都:電子科技大學,2011.
[7]賴勇.出入口人數統計系統的設計與實現[D].成都:電子科技大學,2010.
TP391.41
A
10.15913/j.cnki.kjycx.2019.15.052
2095-6835(2019)15-0127-02
〔編輯:嚴麗琴〕