基于QFD與RAHP的餐館服務(wù)機(jī)器人人因工程設(shè)計(jì)
2019-09-09 03:22:36王秋惠
圖學(xué)學(xué)報(bào) 2019年4期
王秋惠,楊 悅
基于QFD與RAHP的餐館服務(wù)機(jī)器人人因工程設(shè)計(jì)
王秋惠,楊 悅
(天津工業(yè)大學(xué)機(jī)械工程學(xué)院,天津 300387)
以用戶(hù)需求為基礎(chǔ),提出一種新型餐館服務(wù)機(jī)器人人機(jī)系統(tǒng)(HRS)模式,探討了基于質(zhì)量功能展開(kāi)(QFD)理論的餐館服務(wù)機(jī)器人人因工程(HRE)設(shè)計(jì)方法。運(yùn)用抽樣調(diào)查法、問(wèn)卷調(diào)查法和親和圖法(KJ)獲取關(guān)于餐館服務(wù)機(jī)器人用戶(hù)需求的層次化模型。引入粗糙層次分析法(RAHP)計(jì)算各需求特征所占權(quán)重,以此分析基于QFD的餐館服務(wù)機(jī)器人HRE設(shè)計(jì)方法中的重點(diǎn)設(shè)計(jì)目標(biāo)。將用戶(hù)重點(diǎn)需求轉(zhuǎn)化為設(shè)計(jì)要素,設(shè)定功能、外觀及人機(jī)的詳細(xì)質(zhì)量特征,通過(guò)構(gòu)建質(zhì)量屋對(duì)質(zhì)量功能展開(kāi)研究,提出設(shè)計(jì)方案,最終運(yùn)用CATIA人機(jī)分析軟件對(duì)設(shè)計(jì)方案進(jìn)行可用性評(píng)價(jià)及驗(yàn)證可行性。研究表明該設(shè)計(jì)方法及流程可提升餐館服務(wù)機(jī)器人的可用性,為后續(xù)設(shè)計(jì)提供參考。
餐館服務(wù)機(jī)器人;人因工程設(shè)計(jì);用戶(hù)需求;質(zhì)量功能展開(kāi)理論;粗糙層次分析法
餐飲業(yè)整體市場(chǎng)規(guī)模的不斷擴(kuò)大,促使機(jī)器人逐步從傳統(tǒng)工業(yè)應(yīng)用領(lǐng)域轉(zhuǎn)向民眾日常生活。為促進(jìn)餐館服務(wù)模式的改革,服務(wù)機(jī)器人被引入餐飲行業(yè),為現(xiàn)代化餐館提供送餐、點(diǎn)餐及娛樂(lè)等功能。其可替代人工,降低輸出成本,提升工作效率。因此將服務(wù)機(jī)器人應(yīng)用于餐飲服務(wù)業(yè)具有重要意義與推廣價(jià)值[1]。
國(guó)內(nèi)外對(duì)餐館服務(wù)機(jī)器人的研究多集中于定位與路徑規(guī)劃上,ROUSSEAU等[2]開(kāi)發(fā)了一個(gè)自主機(jī)器人系統(tǒng),并使用機(jī)載傳感器檢測(cè)附近的人及啟動(dòng)人機(jī)交互。ZHANG等[3]提出了基于深度相機(jī)和運(yùn)動(dòng)基準(zhǔn)的餐館服務(wù)機(jī)器人及定位與映射系統(tǒng)(simultaneous localization and mapping, SLAM)。YU等[4]闡述了3種地標(biāo)定位算法,實(shí)現(xiàn)了餐館服務(wù)機(jī)器人的粗精度定位。
上述研究對(duì)餐館服務(wù)機(jī)器人的設(shè)計(jì)具有指導(dǎo)價(jià)值,但對(duì)人因工程(human robot ergonomics,HRE)的研究則相對(duì)匱乏。KATO等[5]對(duì)餐館服務(wù)機(jī)器人人性化行為進(jìn)行建模,采取“被動(dòng)”與“積極主動(dòng)”的方法,研究機(jī)器人與用戶(hù)的交互模式。王秋惠等[6]對(duì)老齡服務(wù)機(jī)器人界面、康復(fù)機(jī)器人與陪伴機(jī)器人人機(jī)界面設(shè)計(jì)[7]進(jìn)行了深入研究。
質(zhì)量功能展開(kāi)(quality function deployment, QFD)理論可用于獲取用戶(hù)的需求及重要度[8]。解決餐飲業(yè)服務(wù)系統(tǒng)所面臨問(wèn)題的最有效方法是提供以用戶(hù)為中心的服務(wù)及技術(shù)資源,以滿(mǎn)足用戶(hù)就餐需求。本文基于QFD開(kāi)展對(duì)餐館服務(wù)機(jī)器人HRE的設(shè)計(jì)研究,運(yùn)用粗糙層次分析法(rough analytic hierarchy process,RAHP)對(duì)用戶(hù)需求進(jìn)行重要度運(yùn)算,確保對(duì)餐館服務(wù)機(jī)器人HRE設(shè)計(jì)研究的客觀、科學(xué)及合理性[9]。依此構(gòu)建質(zhì)量屋(house of quality,HOQ),將用戶(hù)需求轉(zhuǎn)化為設(shè)計(jì)需求,鎖定重點(diǎn)、梳理流程,完成餐館服務(wù)機(jī)器人的實(shí)例設(shè)計(jì)。最終運(yùn)用CATIA對(duì)設(shè)計(jì)實(shí)例進(jìn)行可用性評(píng)價(jià),驗(yàn)證設(shè)計(jì)的可行性。
1 餐館服務(wù)機(jī)器人人因工程設(shè)計(jì)流程
QFD可在餐館服務(wù)機(jī)器人設(shè)計(jì)流程中確保需求精準(zhǔn)轉(zhuǎn)化成后續(xù)階段的要求[10],其核心內(nèi)容是進(jìn)行轉(zhuǎn)換,將用戶(hù)需求轉(zhuǎn)換成產(chǎn)品開(kāi)發(fā)各階段的目標(biāo)[11],幫助設(shè)計(jì)人員處理問(wèn)題并完成初始階段的設(shè)計(jì)任務(wù)。
運(yùn)用QFD進(jìn)行用戶(hù)需求分析能夠?yàn)楫a(chǎn)品提供較精準(zhǔn)的造型、功能、結(jié)構(gòu)與人機(jī)設(shè)計(jì)要素[8]。需求分析是設(shè)計(jì)的基礎(chǔ),產(chǎn)品設(shè)計(jì)通過(guò)用戶(hù)需求調(diào)查獲取設(shè)計(jì)依據(jù),確定用戶(hù)需求權(quán)重,進(jìn)而決定產(chǎn)品的功能及結(jié)構(gòu)[12],設(shè)計(jì)流程如圖1所示。
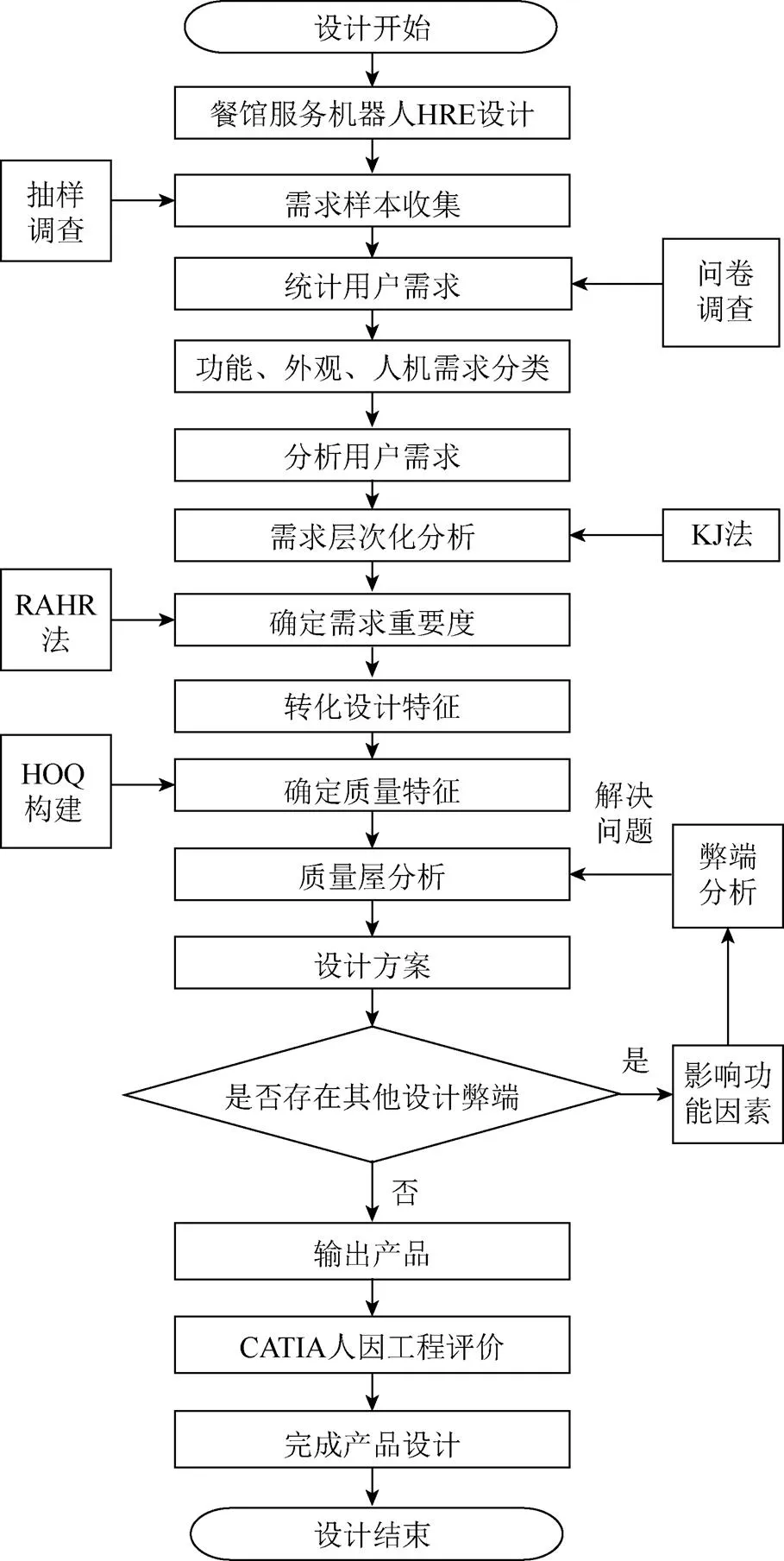
圖1 設(shè)計(jì)流程
2 用戶(hù)需求分析與轉(zhuǎn)化
2.1 基于KJ法的用戶(hù)需求層次化分析
用戶(hù)對(duì)產(chǎn)品的需求可劃分為基本需求、期望需求及特殊需求[13]。市場(chǎng)調(diào)查、同類(lèi)產(chǎn)品質(zhì)量跟蹤、調(diào)查問(wèn)卷、產(chǎn)品發(fā)展現(xiàn)狀及趨勢(shì)分析等手段均可用于收集用戶(hù)需求。親和圖法(affinity diagram)又稱(chēng)KJ法、相關(guān)用戶(hù)訪談法、焦點(diǎn)小組討論法等可對(duì)已獲取的用戶(hù)需求進(jìn)行分類(lèi)、篩選、歸納和補(bǔ)充,從而建立用戶(hù)需求間的層次關(guān)系[14]。通過(guò)不同渠道對(duì)餐館服務(wù)機(jī)器人樣本進(jìn)行抽樣調(diào)查,繼而多方位評(píng)價(jià)目標(biāo)產(chǎn)品,獲取問(wèn)卷調(diào)查的問(wèn)題所在。
設(shè)定用戶(hù)群體為就餐食客,隨機(jī)調(diào)查問(wèn)卷內(nèi)容為人機(jī)、外觀及功能。問(wèn)卷共計(jì)發(fā)放30份,收回30份,收回率100%;男女比例為12∶18。運(yùn)用KJ法對(duì)問(wèn)卷數(shù)據(jù)進(jìn)行聚類(lèi)與精煉,獲得層次化結(jié)構(gòu)的用戶(hù)基本需求信息,見(jiàn)表1。
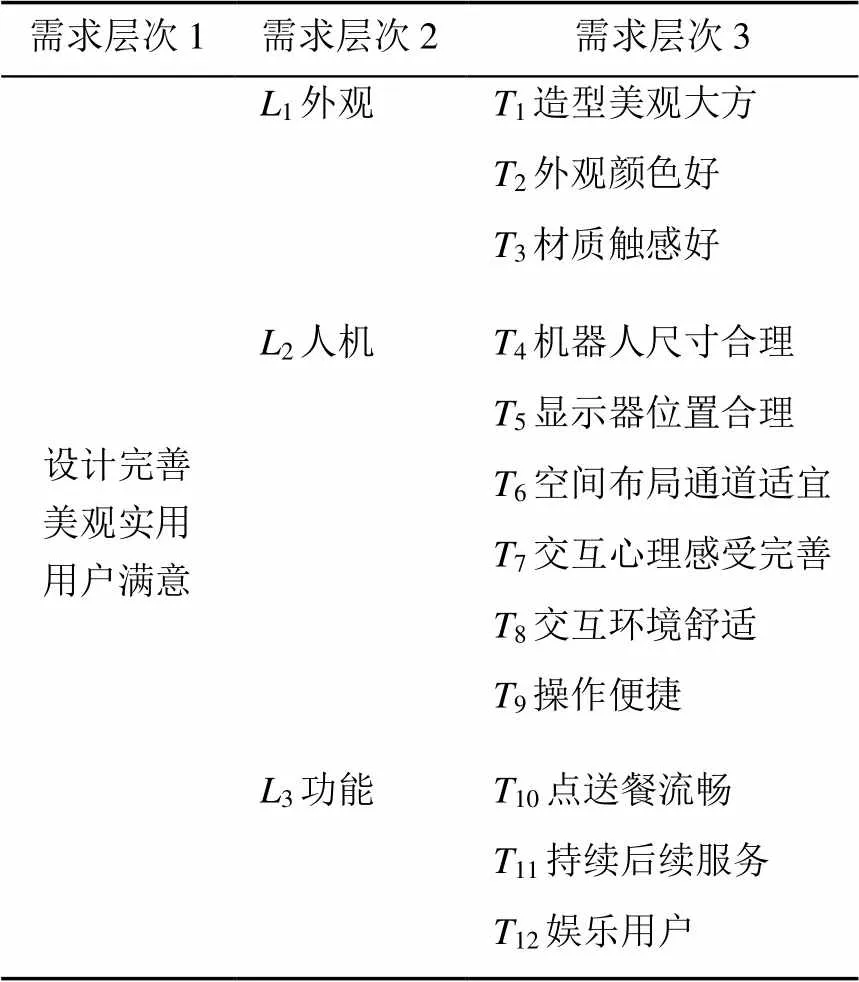
表1 用戶(hù)需求層次化分析
2.2 基于RAHP法的用戶(hù)需求轉(zhuǎn)化與重要度確定
RAHP是將粗糙集理論中提出的粗糙數(shù) (rough number,RN)與粗糙邊界區(qū)間(rough boundary intervals,RBI)的優(yōu)點(diǎn)融合并應(yīng)用于層次分析法之中。由于無(wú)需提供其他所需數(shù)據(jù)之外的先驗(yàn)信息,粗糙集理論可解決用戶(hù)語(yǔ)言不確定性等問(wèn)題[15]。邀請(qǐng)用戶(hù)對(duì)第二層次需求重要度進(jìn)行兩兩對(duì)比,形成RAHP判斷矩陣。共獲取5名用戶(hù)重要度比較評(píng)判數(shù)據(jù),一致性判斷公式可表示為

外觀(1)、人機(jī)(2)、功能(3)、人數(shù)()(=1,2,3,4,5)判斷矩陣與一致性比率運(yùn)算如下

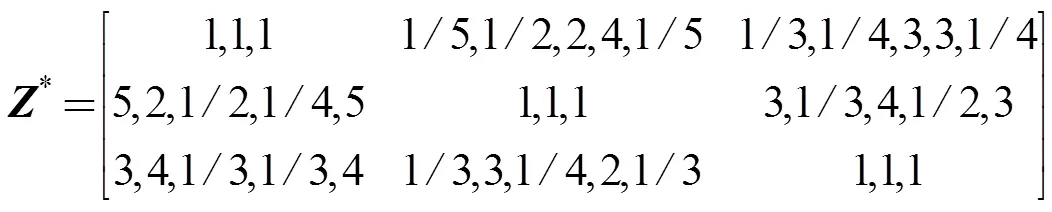
一致性比率1,2,3,4,5均小于0.10,說(shuō)明用戶(hù)評(píng)判具有一致性。據(jù)此構(gòu)建粗糙群決策矩陣[16],求粗糙成對(duì)比較矩陣,將5個(gè)矩陣表示為粗糙群體決策矩陣*的形式,即
計(jì)算21=[5,2,1/2,1/4,5]則

“劃分5”的粗糙數(shù)為

“劃分2”的粗糙數(shù)為
“劃分1/2”的粗糙數(shù)為

“劃分1/4”的粗糙數(shù)為
同理獲取12,13,23,31,32,根據(jù)粗糙數(shù)和平均粗糙區(qū)間構(gòu)建粗糙成對(duì)比較矩陣。
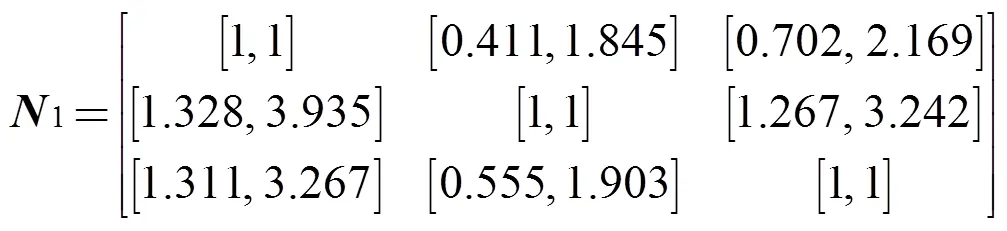
獲取數(shù)據(jù)后計(jì)算各層次用戶(hù)需求重要度。將1矩陣拆解為粗糙下邊界矩陣–和粗糙上邊界矩陣+,即
相應(yīng)求–與+的特征值與特征向量,粗糙下邊界–的特征值與特征向量為

粗糙上邊界+的特征值與特征向量為
進(jìn)行規(guī)范化處理,即
獲取第二層用戶(hù)需求的重要度為
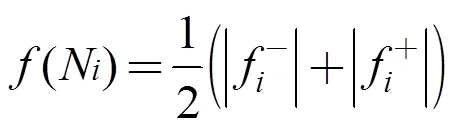

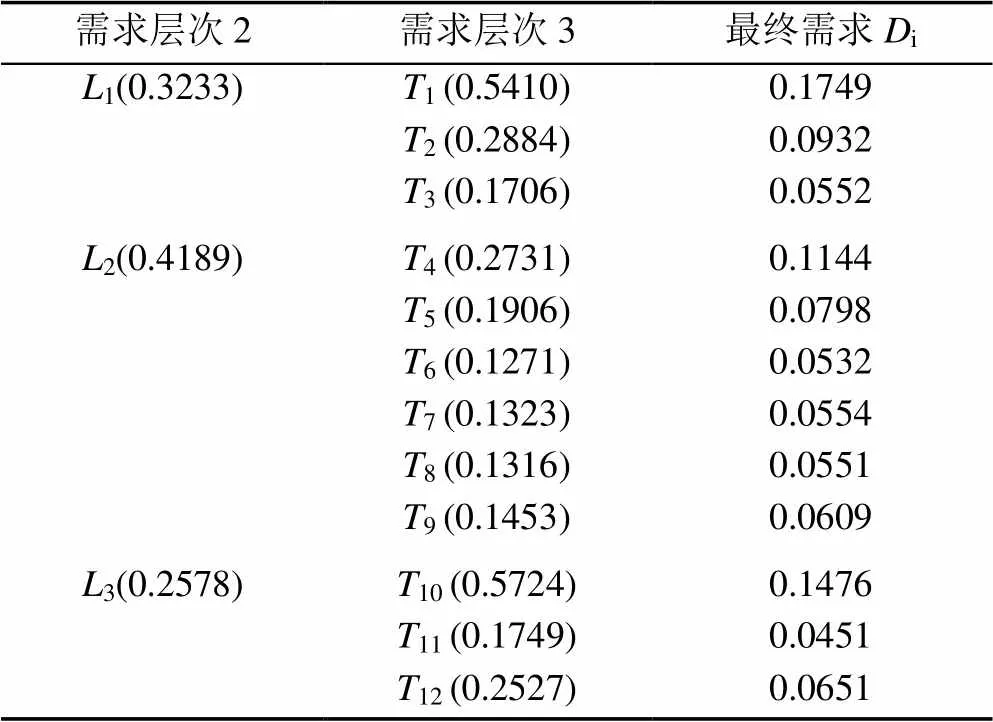
表2 用戶(hù)需求重要度
根據(jù)數(shù)值得出1中用戶(hù)需求重要度排序?yàn)?>2>3;2為4>5>97>8>6;3為10>12>11。將重要度中的1–12項(xiàng)用戶(hù)需求進(jìn)行篩選與精簡(jiǎn),鎖定用戶(hù)對(duì)于餐館服務(wù)機(jī)器人的重點(diǎn)需求,縮小分析范圍,可以增強(qiáng)后期QFD研究的聚焦性與準(zhǔn)確性。根據(jù)不同層級(jí)將L中的 3類(lèi)需求根據(jù)數(shù)值進(jìn)行排序,可以初步判定層級(jí)中重點(diǎn)用戶(hù)需求項(xiàng)。由于用戶(hù)基本層次需求來(lái)源于用戶(hù)調(diào)研,因此無(wú)需再進(jìn)行用戶(hù)評(píng)選,可直接選取每類(lèi)用戶(hù)需求中的前80%作為重點(diǎn)用戶(hù)需求分析。即重點(diǎn)用戶(hù)需求項(xiàng)為1,2,4,5,9,7,10,12。
3 新型人機(jī)HRS模式與HOQ構(gòu)建
3.1 新型人機(jī)HRS模式分析
表2表明人機(jī)需求所占比重較大,因此應(yīng)作為餐館服務(wù)機(jī)器人重點(diǎn)設(shè)計(jì)部分。如何提升人機(jī)功效,需要考慮人-機(jī)-環(huán)之間的關(guān)系,分析交互體驗(yàn)感不佳的具體原因,進(jìn)而從根源提升設(shè)計(jì)質(zhì)量。經(jīng)前期樣本調(diào)查得知,多數(shù)餐館服務(wù)機(jī)器人較少注重人機(jī)交互過(guò)程,而重點(diǎn)定位于點(diǎn)送餐流程的技術(shù)實(shí)現(xiàn)上。用戶(hù)體驗(yàn)效果不佳的原因在于,將機(jī)器人定位于“單純的機(jī)器角色”中,導(dǎo)致人機(jī)環(huán)系統(tǒng)缺乏“同理感受”,無(wú)法提供有價(jià)值的服務(wù)。新型人機(jī)系統(tǒng)(human-robot system, HRS)采用模糊集合的數(shù)理化形式較為直觀地展現(xiàn)人-機(jī)-環(huán)三者之間的組合關(guān)系,分析餐館服務(wù)機(jī)器人在整個(gè)系統(tǒng)中的角色設(shè)定。用戶(hù)(User)、工作人員(Waiter)、服務(wù)機(jī)器人(Robot)、操作系統(tǒng)(Operate)、被控環(huán)境(Environment1)、自控環(huán)境(Environment2)作為模糊集合中的元素,組成1與22類(lèi)模糊合集。
其中,1包含了,,,4個(gè)模糊子集。1={{},{},{},{}}。模糊子集表達(dá)式:={,,1};={,,1};={,,,1};={,,2}。
2將元素直接放入模糊合集中,即

模糊子集個(gè)數(shù)為2,此處取64個(gè)子集。根據(jù)1與2模糊合集分析可知,餐館服務(wù)機(jī)器人HRS改變了傳統(tǒng)人-機(jī)-環(huán)的單一組合模式,有別于傳統(tǒng)的人機(jī)系統(tǒng)(human machine system,HMS)。HRS模糊合集中元素組合模式呈現(xiàn)多元化狀態(tài),將餐館服務(wù)機(jī)器人賦予“人類(lèi)角色”特征,在不同模糊子集中扮演不同角色,總體定義為R-SRhum(humanoid service robot of restaurant)。新型HRS理論可以為后續(xù)設(shè)計(jì)提供理論支撐與輔助性的作用。HRS強(qiáng)調(diào)在人機(jī)交互設(shè)計(jì)過(guò)程中,應(yīng)采用較為主動(dòng)與積極的狀態(tài),模擬真實(shí)服務(wù)人員提供服務(wù),在交互界面功能的提供上更注重情感交流,使機(jī)器人具備不同于傳統(tǒng)機(jī)器的“仿人類(lèi)行為”,凸顯人性化與趣味性,提升用戶(hù)體驗(yàn)。
3.2 餐館服務(wù)機(jī)器人HRE質(zhì)量屋構(gòu)建
HOQ矩陣是QFD的核心體現(xiàn)[17],由用戶(hù)需求和工程特性構(gòu)成[18]。在將用戶(hù)需求轉(zhuǎn)換為質(zhì)量特征的過(guò)程中,結(jié)合KJ法與RAHP法可有效地進(jìn)行餐館服務(wù)機(jī)器人HRE設(shè)計(jì)方法研究。
R-SRhum的設(shè)計(jì)目標(biāo)是根據(jù)用戶(hù)需求提升人機(jī)效能,增強(qiáng)用戶(hù)體驗(yàn),為餐館節(jié)省人力、物力,提高效率與增加收益。結(jié)合QFD理論與前期用戶(hù)分析數(shù)據(jù)規(guī)劃HOQ具體內(nèi)容,確定R-SRhum需求特征所對(duì)應(yīng)的設(shè)計(jì)質(zhì)量特征目標(biāo)。將質(zhì)量需求作為矩陣輸入內(nèi)容,質(zhì)量特性作為其輸出結(jié)果,兩者組合形成R-SRhum的HOQ。設(shè)計(jì)特征根據(jù)用戶(hù)需求進(jìn)行篩選和制定,兩者需要存在必要的關(guān)聯(lián)性,需求轉(zhuǎn)化為設(shè)計(jì)特征,需要進(jìn)行合理的推導(dǎo),以滿(mǎn)足用戶(hù)重點(diǎn)需求。例如,1需求為造型美觀大方,進(jìn)行推導(dǎo)可以得出4機(jī)身干凈明亮、6機(jī)器人造型親切及8信息明確的設(shè)計(jì)特征與要求。在外觀設(shè)計(jì)的過(guò)程中考慮造型的風(fēng)格,以達(dá)到造型親切的設(shè)計(jì)要求,滿(mǎn)足用戶(hù)重點(diǎn)需求。HOQ中用符號(hào)表示每種質(zhì)量需求與特性的關(guān)系,重要度評(píng)價(jià)可確定每項(xiàng)設(shè)計(jì)要素對(duì)于用戶(hù)需求的重要程度,取值范圍 0~5,5為重要度最強(qiáng),4為較強(qiáng),3為一般,2為較差,1為最差,0為無(wú)重要度。分值越高表示其更具設(shè)計(jì)價(jià)值,如圖2所示。
圖2 R-SRhum質(zhì)量屋
4 設(shè)計(jì)方案與人因工程評(píng)價(jià)
4.1 R-SRhum人因工程設(shè)計(jì)實(shí)例
依據(jù)用戶(hù)需求及提取的設(shè)計(jì)質(zhì)量特征要素重要度,對(duì)實(shí)例A1進(jìn)行設(shè)計(jì),如圖3所示。A1整體造型設(shè)計(jì)呈現(xiàn)流暢圓潤(rùn)的形態(tài),采用人形外觀可最大程度上體現(xiàn)其交互親和性,滿(mǎn)足1,4,7,9需求,實(shí)現(xiàn)4,6,8的設(shè)計(jì)要素。
A1整體尺寸為1 300 mm,餐盤(pán)距地面高度為773 mm,顯示屏距地面990 mm。滿(mǎn)足1,5需求,實(shí)現(xiàn)了1,2設(shè)計(jì)要素。尺寸參考餐館餐桌高度以及就餐用戶(hù)的視覺(jué)空間范圍及手肘高度等。國(guó)內(nèi)餐桌的形狀以方桌和圓桌為主,一般餐桌的標(biāo)準(zhǔn)高度為710~730 mm,而餐椅的高度則在410~430 mm,因此A1尺寸符合送餐要求。
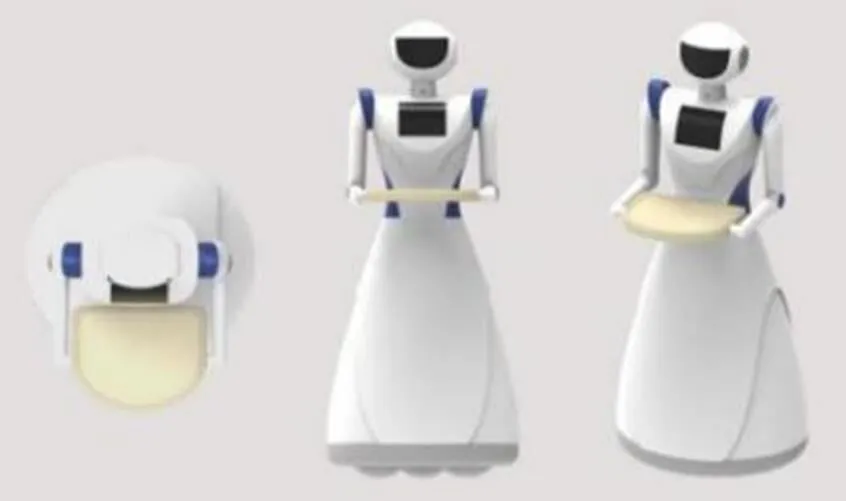
圖3 A1主效果圖
結(jié)構(gòu)分為餐館服務(wù)機(jī)器人整體、底部盤(pán)和人機(jī)交互屏幕。主體部分包括頭部、軀干、上肢及下肢;底部盤(pán)包括底盤(pán)模組、驅(qū)動(dòng)裝置、定位模塊及電池模塊;視覺(jué)信息顯示器包括信息傳遞、功能選擇、觸碰按鈕及視覺(jué)表情,較好地增強(qiáng)人機(jī)交互體驗(yàn)[19]。可滿(mǎn)足4,5,9及10需求,實(shí)現(xiàn)5,8,10,11,12及13的設(shè)計(jì)要素。
結(jié)合HOQ與用戶(hù)需求運(yùn)算結(jié)果,提出A1功能重點(diǎn)設(shè)計(jì)要素如圖4所示。10與12在3需求中所占比例為0.572 4與0.252 7,為滿(mǎn)足用戶(hù)需求,將功能分為點(diǎn)餐、交互與娛樂(lè)功能。可滿(mǎn)足9,10,12的需求,實(shí)現(xiàn)7,8,10,11的設(shè)計(jì)要素。
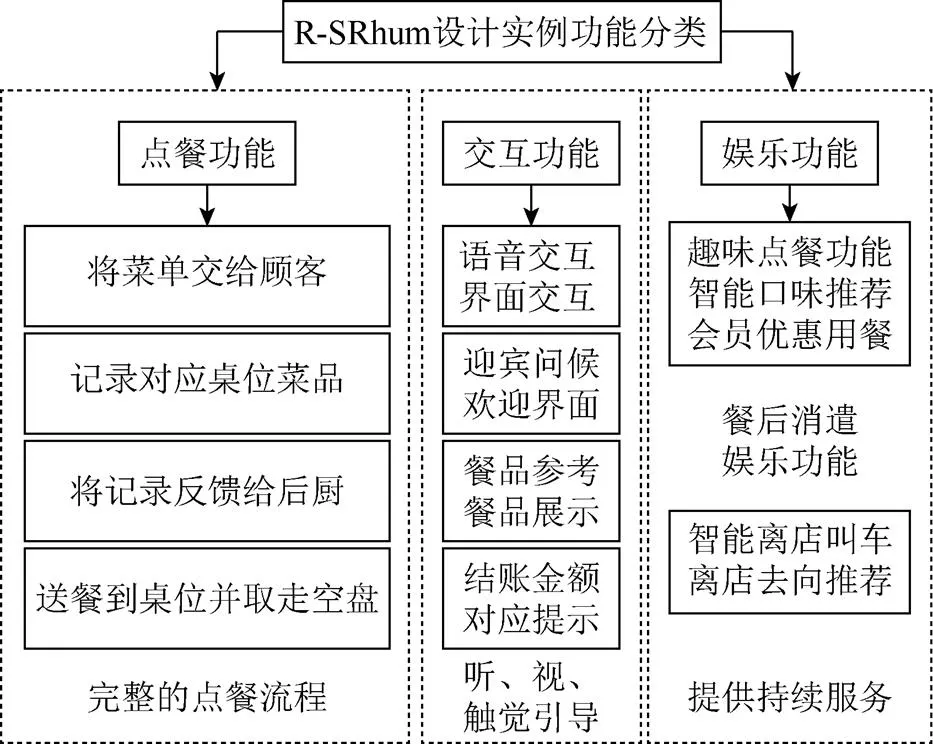
圖4 A1功能分析
配色方案采用白色作為主色,選取亮度及明度適中的顏色作為搭配色,如沉靜藍(lán)、舒適綠、優(yōu)雅紫、動(dòng)感黃,如圖5所示。可滿(mǎn)足1,2的需求,實(shí)現(xiàn)4,6的設(shè)計(jì)要素。

圖5 A1配色方案
4.2 CATIA人機(jī)工程評(píng)價(jià)
在CATIA中建立人體尺寸模型,選取P5女與P95男,輸入相應(yīng)尺寸,得到人體模型B1(女)和B2(男)。將A1導(dǎo)入B1與B2中分別進(jìn)行人機(jī)工程分析。類(lèi)別分為站、坐姿視野范圍分析、可達(dá)域分析和舒適度分析,以此判定A1的機(jī)身尺寸與顯示屏設(shè)計(jì)符合人機(jī)工程要求,并獲知用戶(hù)對(duì)產(chǎn)品的認(rèn)可程度。
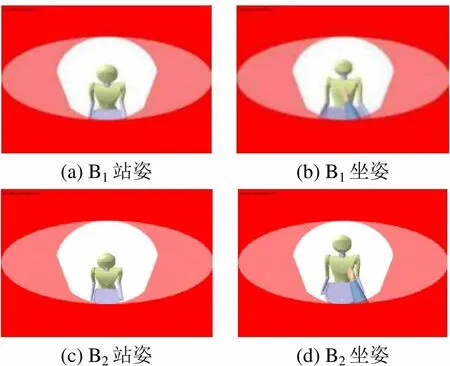
站姿狀態(tài)下B1頸椎彎曲13°,B2彎曲14°,A1面部處于視野聚焦中心,B2較B1需要略微彎曲頸椎,但均處于正常范圍之內(nèi),無(wú)疲勞狀態(tài)。坐姿狀態(tài)下B1頸椎后傾1°,B2頸椎彎曲5°,A1面部處于視野聚焦中心,均處于正常值范圍之內(nèi),無(wú)疲勞狀態(tài),如圖6所示,視野范圍如圖7所示。
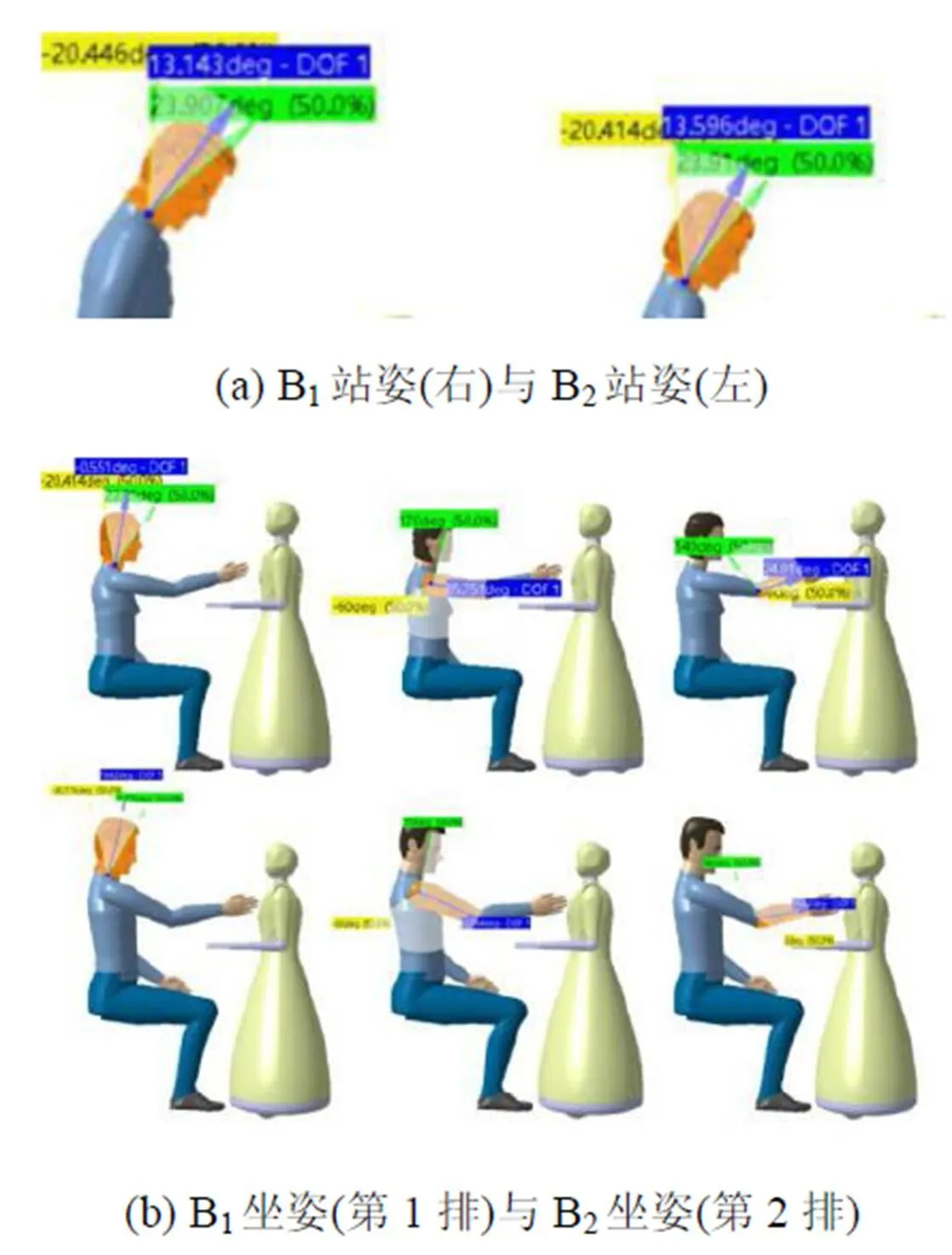
圖6 角度分析
(a) B1站姿(b) B1坐姿 (c) B2站姿(d) B2坐姿
對(duì)B1與B2進(jìn)行可達(dá)域分析,從評(píng)價(jià)結(jié)果得出在視野安全距離坐姿狀態(tài)下,屏幕范圍均在B1、B2可達(dá)域范圍內(nèi),但B2在坐姿狀態(tài)下手部可達(dá)域較B1范圍更廣,如圖8所示。
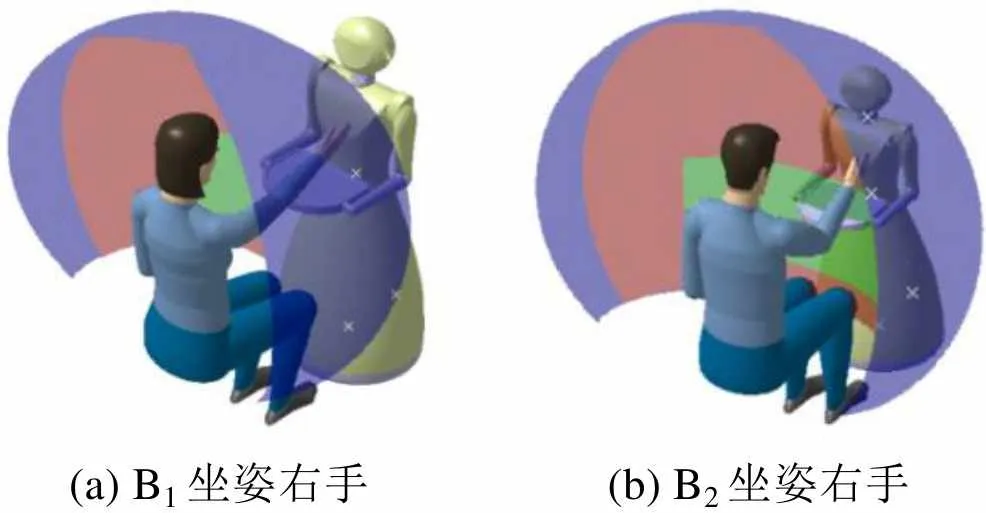
(a) B1坐姿右手(b) B2坐姿右手
對(duì)B1與B2的姿態(tài)進(jìn)行舒適度評(píng)估。評(píng)估標(biāo)準(zhǔn)為藍(lán)色表示姿勢(shì)舒適可以接受;橙色表示姿勢(shì)易疲勞,可讓步接受;紅色表示姿勢(shì)不舒適,極易疲勞,不能接受。B1和B2的坐姿狀態(tài)交互姿態(tài)評(píng)估均為黃色,低于橙色,且舒適度數(shù)值均達(dá)到85分以上,姿勢(shì)舒適,如圖9所示。
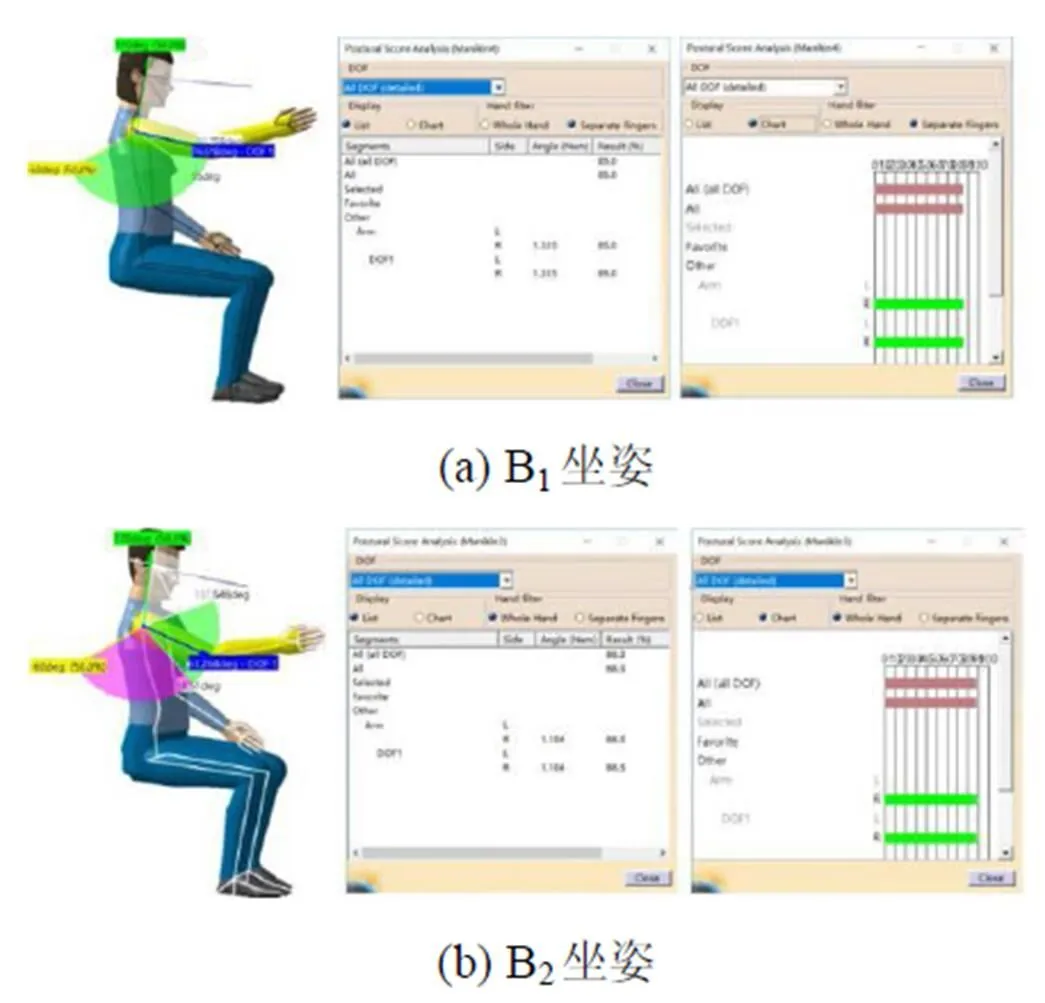
圖9 舒適度分析
綜上,站姿與坐姿2種交互動(dòng)作極限值均處于舒適度范圍內(nèi),無(wú)疲勞狀態(tài)。A1交互顯示屏處于人眼視野中心位置,且手臂在舒適狀態(tài)下可完成點(diǎn)餐觸屏與取餐等操作。安全距離坐姿下可達(dá)域范圍較廣,完全滿(mǎn)足交互過(guò)程中的操作距離。結(jié)果表明,B1和B2與A1的交互姿勢(shì)評(píng)價(jià)均滿(mǎn)足要求,說(shuō)明A1機(jī)身尺寸與顯示屏設(shè)計(jì)合理。同步驗(yàn)證A1的設(shè)計(jì)滿(mǎn)足了4,5,9及10的重點(diǎn)用戶(hù)需求,完成了5,8,10,11,12及13的設(shè)計(jì)要求,其人機(jī)設(shè)計(jì)合理,可用性較高。
5 結(jié)束語(yǔ)
用戶(hù)需求為產(chǎn)品設(shè)計(jì)中首要考慮的要素,通過(guò)對(duì)國(guó)內(nèi)外餐館服務(wù)機(jī)器人研究方向與發(fā)展?fàn)顩r進(jìn)行分析,本文提出了新型HRS模式。從外觀、功能及人機(jī)3方面運(yùn)用抽樣和問(wèn)卷調(diào)查法獲取了基礎(chǔ)用戶(hù)需求,運(yùn)用KJ法構(gòu)建用戶(hù)需求層次化模型,利用RAHP計(jì)算用戶(hù)需求重要度。將需求特征轉(zhuǎn)化成設(shè)計(jì)要素,構(gòu)建HOQ,直觀測(cè)評(píng)工程設(shè)計(jì)中特征因素的權(quán)重。依據(jù)所獲參數(shù)并結(jié)合用戶(hù)自身特性總結(jié)設(shè)計(jì)創(chuàng)新點(diǎn),完成設(shè)計(jì)實(shí)例。最終運(yùn)用CATIA對(duì)設(shè)計(jì)進(jìn)行人機(jī)工程分析,提高用戶(hù)信任度并獲取良好的用戶(hù)體驗(yàn)。
總之,QFD理論可以縮短設(shè)計(jì)周期,預(yù)估R-SRhum人因工程設(shè)計(jì)前期會(huì)出現(xiàn)的問(wèn)題,此設(shè)計(jì)方法及流程可有效提高R-SRhum的使用率和普適性。
[1] 姚墨迪, 王劉菲, 馮淑元. 餐廳服務(wù)機(jī)器人的研究[J]. 教育教學(xué)論壇, 2016(15): 70-71.
[2] ROUSSEAU V, FERLAND F, LéTOURNEAU D, et al. Sorry to interrupt, but may I have your attention? preliminary design and evaluation of autonomous engagement in HRI[J]. Journal of Human-Robot Interaction, 2013, 2(3): 41-61.
[3] ZHANG J L, OU Y S, JIANG G L, et al. An approach to restaurant service robot SLAM [C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO). New York: IEEE Press, 2016: 2122-2127.
[4] YU Q X, YUAN C, FU Z, et al. Research of the localization of restaurant service robot [J]. International Journal of Advanced Robotic Systems, 2010, 7(3): 18.
[5] KATO Y, KANDA T, ISHIGURO H. May I help you? Design of human-like polite approaching behavior [C]// Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (HRI'15). New York: ACMPress, 2015: 35-42.
[6] 王秋惠, 張一凡, 劉力蒙. 老齡服務(wù)機(jī)器人人機(jī)界面設(shè)計(jì)研究進(jìn)展[J]. 機(jī)械設(shè)計(jì), 2018,35(9): 105-113.
[7] 王秋惠, 魏玉坤, 劉力蒙. 康復(fù)機(jī)器人研究與應(yīng)用進(jìn)展[J]. 包裝工程, 2018, 39(18): 83-89.
[8] 劉宗明, 葛碧慧. 基于QFD的老年家用陪護(hù)機(jī)器人設(shè)計(jì)[J]. 圖學(xué)學(xué)報(bào), 2018,39(4): 695-699.
[9] 汪洋, 余隋懷, 楊延璞. 基于QFD和AHP的飛機(jī)客艙內(nèi)環(huán)境人機(jī)系統(tǒng)評(píng)價(jià)[J]. 航空制造技術(shù), 2013(8): 86-91.
[10] 杜芳琪, 熊偉. 基于QFD、TRIZ和DOE的產(chǎn)品設(shè)計(jì)方法研究[J]. 技術(shù)經(jīng)濟(jì)與管理研究, 2008(5): 12-14.
[11] 段黎明, 黃歡. QFD和Kano模型的集成方法及應(yīng)用[J]. 重慶大學(xué)學(xué)報(bào), 2008, 31(5): 515-519.
[12] 鄧麗, 劉階萍, 查建中. 基于質(zhì)量功能展開(kāi)(QFD)的產(chǎn)品設(shè)計(jì)模糊綜合評(píng)價(jià)[J]. 現(xiàn)代制造工程, 2005(3): 4-7.
[13] Cristiano J J, Liker J K, White III C C. Key factors in the successful application of quality function deployment (QFD) [J]. IEEE Transactions on Engineering Management, 2001, 48(1): 81-95.
[14] 劉渤海, 倪大偉. QFD在新產(chǎn)品開(kāi)發(fā)中的應(yīng)用研究[J]. 機(jī)械工程與自動(dòng)化, 2009(1): 57-60.
[15] 王曉暾, 熊偉.質(zhì)量功能展開(kāi)中顧客需求重要度確定的粗糙層次分析法[J].計(jì)算機(jī)集成制造系統(tǒng), 2010, 16(4): 763-771.
[16] KWONG C K, BAI H. Determining the importance weights for the customer requirements in QFD using a fuzzy AHP with an extent analysis approach [J]. IIE Transactions, 2003, 35(7): 619-626.
[17] 古瑩奎, 黃洪鐘, 孫占全.質(zhì)量屋在產(chǎn)品生命周期設(shè)計(jì)中的應(yīng)用[J].中國(guó)機(jī)械工程, 2003(24): 71-74, 6.
[18] 陸佳圓, 譚建榮, 馮毅雄, 等. 基于最小二乘支持向量機(jī)的QFD技術(shù)特性權(quán)重預(yù)測(cè)[J]. 機(jī)械設(shè)計(jì), 2011, 28(7): 1-7.
[19] 王秋惠, 代欣. 基于人因視角的兒童陪伴機(jī)器人交互界面設(shè)計(jì)研究[J]. 技術(shù)與創(chuàng)新管理, 2019, 40(1): 44-47, 79.
Methods of Human Robot Ergonomics Design of Restaurant Service Robot Based on QFD and RAHP
WANG Qiu-hui, YANG Yue
(School of Mechanical Engineering, Tianjin Polytechnic University, Tianjin 300387, China)
Based on the user demands, this study proposes a new human-robot system(HRS)mode of restaurant service robot, and discusses the method of applying the quality function deployment(QFD)theory to the design of human-robot ergonomics (HRE) for restaurant service robot. We use sampling survey, questionnaire survey and KJ to obtain hierarchical model of customer demand for restaurant service robot, introduce the rough analytic hierarchy process (RAHP) to calculate the weight of each demand feature, and analyze the key design objectives of the HRE design method based on quality function deployment. The crucial needs of users are transformed into design elements, then we set up the detailed demand characteristics of function, appearance and human-robot in HRE design. Through the house of quality to research on the quality function and get the design scheme, we use CATIA human-robot analysis software to evaluate the usability of the design scheme and verify the feasibility. The research results show this method has improved the usability of restaurant service robots and provided a reference for the subsequent designs.
restaurant service robot; human-robot ergonomics design; user demand; quality function deployment; rough analytic hierarchy process
TP 242
10.11996/JG.j.2095-302X.2019040739
A
2095-302X(2019)04-0739-07
2019-03-24;
定稿日期:2019-04-23
教育部人文社科規(guī)劃基金項(xiàng)目(19YJAZH093)
王秋惠(1969-),女,山東安丘人,教授,博士,碩士生導(dǎo)師。主要研究方向?yàn)楣I(yè)設(shè)計(jì)、智能人因?qū)W、機(jī)器人人因工程及人機(jī)界面設(shè)計(jì)。 E-mail:wangqiuhui@126.com
猜你喜歡
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
商周刊(2017年9期)2017-08-22 02:57:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商用汽車(chē)(2016年11期)2016-12-19 01:20:16
商用汽車(chē)(2016年6期)2016-06-29 09:18:54
商用汽車(chē)(2016年4期)2016-05-09 01:23:12