基于人工神經網絡的智能交通信號燈控制系統的研究
2019-09-10 04:52:09趙偉彬梁麗君林舒暖
學習與科普 2019年27期
趙偉彬 梁麗君 林舒暖
摘 要:本文建立了一種基于人工神經網絡遺傳算法的交通信號燈控制系統解決固定交通燈相位周期問題,重點研究一種基于遺傳算法的交通信號燈控制系統,根據當前路口車流量的大小來控制信號燈相位時間。最主要的關鍵點,通過優化人工神經網絡算法,根據實時檢測到的車流量信息,將遺傳算法應用到交通燈控制中,實現自適應控制。
關鍵詞:交通信號燈控制系統;人工神經網絡;自適應控制
一、交通信號燈控制系統實現
對于能夠自行靈活調整的交通信號燈控制系統,我們先是利用目前普遍存在的“電子警察”對道路中車流量的信息進行收集檢測處理,再在遺傳算法的基礎上,對交通信號燈的時間周期依據車流量擁堵和暢通程度進行自動調整更新,使每個路口的車輛都能以最少紅燈等待時間快速通過。同時,也提出一種對待道路口存在特殊車輛時能優先放行特殊車輛的方法。
1.車流量的檢測
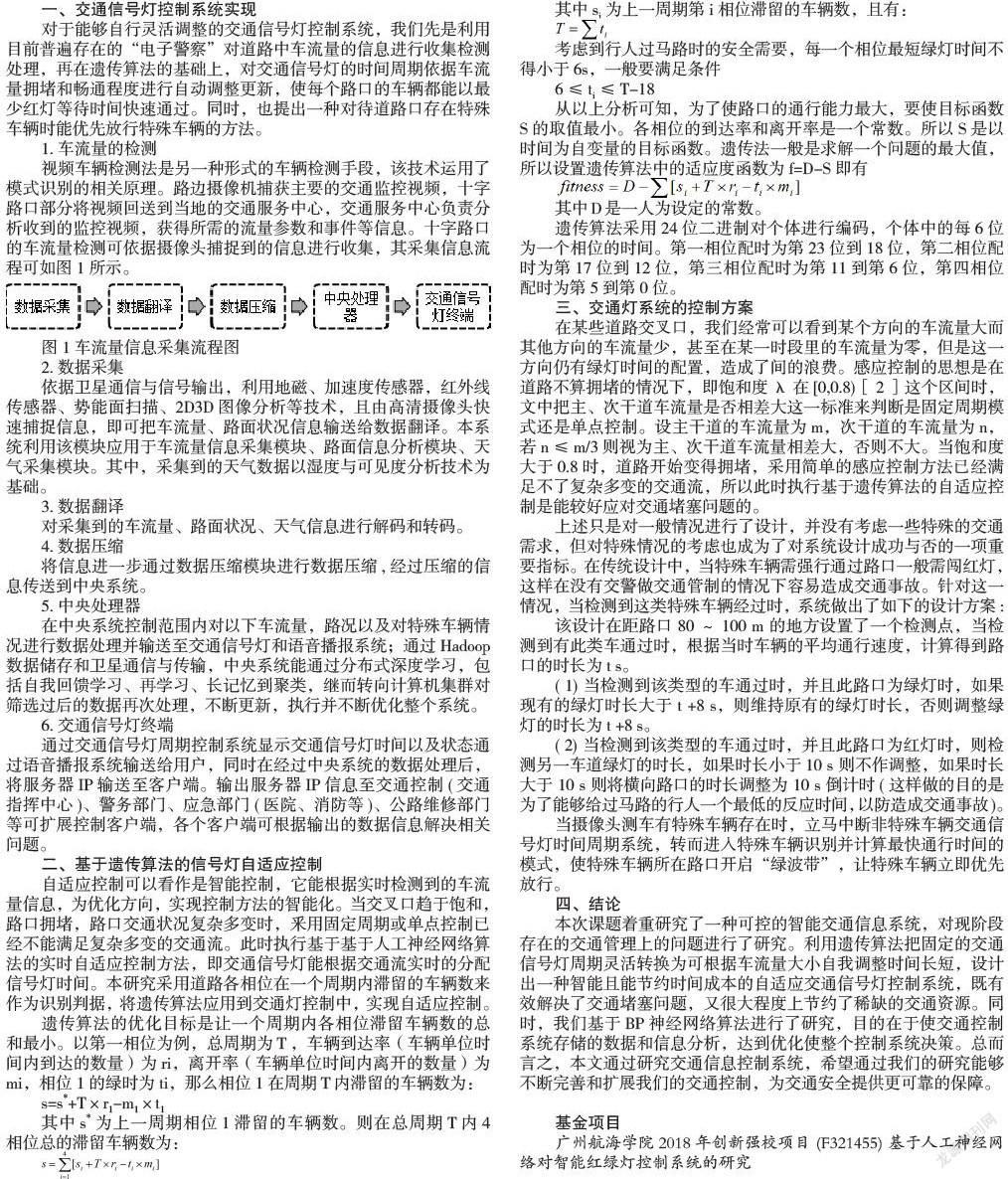
視頻車輛檢測法是另一種形式的車輛檢測手段,該技術運用了模式識別的相關原理。路邊攝像機捕獲主要的交通監控視頻,十字路口部分將視頻回送到當地的交通服務中心,交通服務中心負責分析收到的監控視頻,獲得所需的流量參數和事件等信息。十字路口的車流量檢測可依據攝像頭捕捉到的信息進行收集,其采集信息流程可如圖1所示。
2.數據采集
依據衛星通信與信號輸出,利用地磁、加速度傳感器,紅外線傳感器、勢能面掃描、2D3D圖像分析等技術,且由高清攝像頭快速捕捉信息,即可把車流量、路面狀況信息輸送給數據翻譯。本系統利用該模塊應用于車流量信息采集模塊、路面信息分析模塊、天氣采集模塊。其中,采集到的天氣數據以濕度與可見度分析技術為基礎。
3.數據翻譯
對采集到的車流量、路面狀況、天氣信息進行解碼和轉碼。
4.數據壓縮
將信息進一步通過數據壓縮模塊進行數據壓縮,經過壓縮的信息傳送到中央系統。
5.中央處理器
在中央系統控制范圍內對以下車流量,路況以及對特殊車輛情況進行數據處理并輸送至交通信號燈和語音播報系統;通過Hadoop數據儲存和衛星通信與傳輸,中央系統能通過分布式深度學習,包括自我回饋學習、再學習、長記憶到聚類,繼而轉向計算機集群對篩選過后的數據再次處理,不斷更新,執行并不斷優化整個系統。
6.交通信號燈終端
通過交通信號燈周期控制系統顯示交通信號燈時間以及狀態通過語音播報系統輸送給用戶,同時在經過中央系統的數據處理后,將服務器IP輸送至客戶端。輸出服務器IP信息至交通控制(交通指揮中心)、警務部門、應急部門(醫院、消防等)、公路維修部門等可擴展控制客戶端,各個客戶端可根據輸出的數據信息解決相關問題。
二、基于遺傳算法的信號燈自適應控制
自適應控制可以看作是智能控制,它能根據實時檢測到的車流量信息,為優化方向,實現控制方法的智能化。當交叉口趨于飽和,路口擁堵,路口交通狀況復雜多變時,釆用固定周期或單點控制已經不能滿足復雜多變的交通流。此時執行基于基于人工神經網絡算法的實時自適應控制方法,即交通信號燈能根據交通流實時的分配信號燈時間。本研究采用道路各相位在一個周期內滯留的車輛數來作為識別判據,將遺傳算法應用到交通燈控制中,實現自適應控制。
遺傳算法的優化目標是讓一個周期內各相位滯留車輛數的總和最小。以第一相位為例,總周期為T,車輛到達率(車輛單位時間內到達的數量)為ri,離開率(車輛單位時間內離開的數量)為mi,相位1的綠時為ti,那么相位1在周期T內滯留的車輛數為:
從以上分析可知,為了使路口的通行能力最大,要使目標函數S的取值最小。各相位的到達率和離開率是一個常數。所以S是以時間為自變量的目標函數。遺傳法一般是求解一個問題的最大值,所以設置遺傳算法中的適應度函數為f=D-S即有
其中D是一人為設定的常數。
遺傳算法采用24位二進制對個體進行編碼,個體中的每6位為一個相位的時間。第一相位配時為第23位到18位,第二相位配時為第17位到12位,第三相位配時為第11到第6位,第四相位配時為第5到第0位。
三、交通燈系統的控制方案
在某些道路交叉口,我們經常可以看到某個方向的車流量大而其他方向的車流量少,甚至在某一時段里的車流量為零,但是這一方向仍有綠燈時間的配置,造成了間的浪費。感應控制的思想是在道路不算擁堵的情況下,即飽和度λ在[0,0.8)[2]這個區間時,文中把主、次干道車流量是否相差大這一標準來判斷是固定周期模式還是單點控制。設主干道的車流量為m,次干道的車流量為n,若n≤m/3則視為主、次干道車流量相差大,否則不大。當飽和度大于0.8時,道路開始變得擁堵,采用簡單的感應控制方法已經滿足不了復雜多變的交通流,所以此時執行基于遺傳算法的自適應控制是能較好應對交通堵塞問題的。
上述只是對一般情況進行了設計,并沒有考慮一些特殊的交通需求,但對特殊情況的考慮也成為了對系統設計成功與否的一項重要指標。在傳統設計中,當特殊車輛需強行通過路口一般需闖紅燈,這樣在沒有交警做交通管制的情況下容易造成交通事故。針對這一情況,當檢測到這類特殊車輛經過時,系統做出了如下的設計方案:
該設計在距路口 80 ~ 100 m 的地方設置了一個檢測點,當檢測到有此類車通過時,根據當時車輛的平均通行速度,計算得到路口的時長為 t s。
( 1) 當檢測到該類型的車通過時,并且此路口為綠燈時,如果現有的綠燈時長大于 t +8 s,則維持原有的綠燈時長,否則調整綠燈的時長為 t +8 s。
( 2) 當檢測到該類型的車通過時,并且此路口為紅燈時,則檢測另一車道綠燈的時長,如果時長小于10 s 則不作調整,如果時長大于 10 s 則將橫向路口的時長調整為 10 s 倒計時( 這樣做的目的是為了能夠給過馬路的行人一個最低的反應時間,以防造成交通事故)。
當攝像頭測車有特殊車輛存在時,立馬中斷非特殊車輛交通信號燈時間周期系統,轉而進入特殊車輛識別并計算最快通行時間的模式,使特殊車輛所在路口開啟“綠波帶”,讓特殊車輛立即優先放行。
四、結論
本次課題著重研究了一種可控的智能交通信息系統,對現階段存在的交通管理上的問題進行了研究。利用遺傳算法把固定的交通信號燈周期靈活轉換為可根據車流量大小自我調整時間長短,設計出一種智能且能節約時間成本的自適應交通信號燈控制系統,既有效解決了交通堵塞問題,又很大程度上節約了稀缺的交通資源。同時,我們基于BP神經網絡算法進行了研究,目的在于使交通控制系統存儲的數據和信息分析,達到優化使整個控制系統決策。總而言之,本文通過研究交通信息控制系統,希望通過我們的研究能夠不斷完善和擴展我們的交通控制,為交通安全提供更可靠的保障。
基金項目
廣州航海學院2018年創新強校項目 (F321455) 基于人工神經網絡對智能紅綠燈控制系統的研究
