傾轉(zhuǎn)四旋翼無人機(jī)直升機(jī)模式控制方法
2019-09-10 21:44:09孫立志
無人機(jī) 2019年3期
關(guān)鍵詞:設(shè)計(jì)
孫立志







隨著無人機(jī)技術(shù)日趨先進(jìn),融合無人直升機(jī)和固定翼無人機(jī)優(yōu)點(diǎn)的無人機(jī)型應(yīng)運(yùn)而生。其中,傾轉(zhuǎn)四旋翼無人機(jī)兼具可垂直起降、載重量大及巡航速度高等特點(diǎn)的無,是極具發(fā)展?jié)摿Φ男滦蜔o人機(jī)種。采用經(jīng)典力學(xué)理論,對(duì)傾轉(zhuǎn)四旋翼無人機(jī)進(jìn)行了力學(xué)分析,建立了直升機(jī)模式下的模型,得出了其質(zhì)心運(yùn)動(dòng)的動(dòng)力學(xué)方程;確定了在直升機(jī)模式下的姿態(tài)和位置控制方法,設(shè)計(jì)了傾轉(zhuǎn)四旋翼無人機(jī)各個(gè)控制回路的控制結(jié)構(gòu)和控制律。
傾轉(zhuǎn)四旋翼無人機(jī)具有可以傾轉(zhuǎn)的旋翼,同時(shí)有水平固定機(jī)翼,因此在巡航速度、有效載荷上更加突出,在軍事和商業(yè)方面具有廣闊的應(yīng)用前景,是未來無人無人機(jī)發(fā)展的一個(gè)重要方向。
傾轉(zhuǎn)旋翼機(jī)的控制方式主要有兩種,一種是直升機(jī)控制模式,另一種是固定翼無人機(jī)控制模式。其飛行過程如下,無人機(jī)首先在直升機(jī)模式下垂直起飛達(dá)到一定高度;接著進(jìn)入過渡飛行階段,短艙發(fā)生傾轉(zhuǎn),旋翼回轉(zhuǎn)面由平行于機(jī)身縱軸逐漸傾轉(zhuǎn)至垂直于機(jī)身縱軸,在該階段,旋翼逐漸轉(zhuǎn)換為提供推力,而升力則由固定翼提供;完成旋翼傾轉(zhuǎn)后,無人機(jī)進(jìn)入平飛模式,以固定翼模式巡航飛行。在垂直起降的過程中可以按照直升機(jī)控制方法來控制,通過改變旋翼的拉力矢量來改變飛行狀態(tài);在平飛階段主要采用固定翼無人機(jī)控制模式,通過控制氣動(dòng)舵面的來控制飛行狀態(tài)。
傾轉(zhuǎn)四旋翼無人機(jī)力學(xué)模型
坐標(biāo)軸系的定義
為便于對(duì)傾轉(zhuǎn)四旋翼無人機(jī)進(jìn)行力學(xué)分析,需要分別建立機(jī)體坐標(biāo)系和地理坐標(biāo)系如圖1所示。
式中,θ為俯仰角,φ為橫滾角,ψ為偏航角。
傾轉(zhuǎn)四旋翼無人機(jī)直升機(jī)模式下的力學(xué)建模
利用經(jīng)典力學(xué)對(duì)傾轉(zhuǎn)四旋翼無人機(jī)進(jìn)行力學(xué)分析,進(jìn)行以下假設(shè)以簡化分析:
(1)將傾轉(zhuǎn)四旋翼無人機(jī)視為剛體,且質(zhì)量是常數(shù);
(2)假設(shè)地面為慣性參考系;
(3)忽略地球曲率,視地面為平面;
(4)假設(shè)重力加速度不隨飛行高度變化而變化。
由于在直升機(jī)模式下前飛速度較慢,氣動(dòng)舵對(duì)無人機(jī)的受力影響很小,故無人機(jī)主要受到旋翼拉力T和重力G的作用。設(shè)四個(gè)旋翼的拉力分別為T1、T2、T3和T4,旋翼傾轉(zhuǎn)角為EMBED Equation.DSMT4,則旋翼拉力在機(jī)體坐標(biāo)軸系中的分量如下
傾轉(zhuǎn)四旋翼無人機(jī)直升機(jī)模式下的控制方法
直升機(jī)模式下的姿態(tài)控制方法
在直升機(jī)模式下,飛行速度低,因此氣動(dòng)舵面的控制功效很弱,為減小固定翼與旋翼的相互干擾作用,將副翼下偏,此時(shí)可以通過控制相應(yīng)發(fā)動(dòng)機(jī)的轉(zhuǎn)速從而實(shí)現(xiàn)無人機(jī)的姿態(tài)控制。
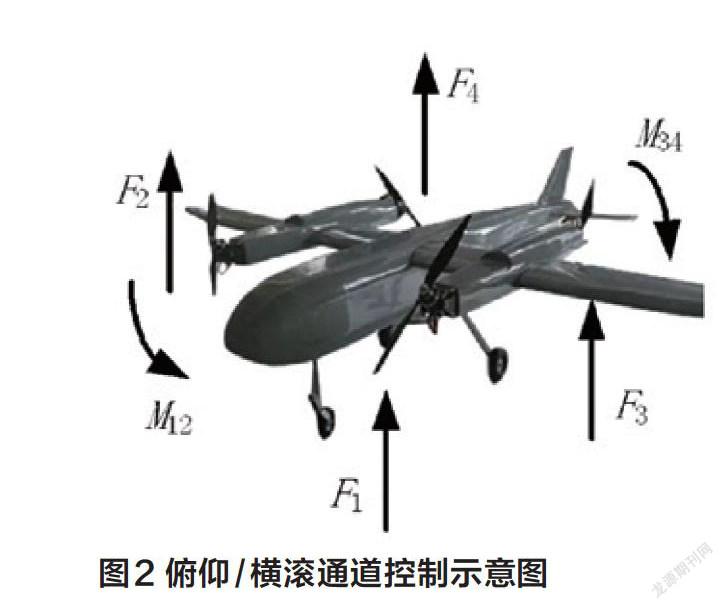
(1)俯仰/橫滾控制
由于在直升機(jī)模式下俯仰與橫滾控制非常類似,因此統(tǒng)一分析如下。傾轉(zhuǎn)四旋翼無人機(jī)俯仰/橫滾通道的姿態(tài)控制主要是通過調(diào)節(jié)前后/左右旋翼的轉(zhuǎn)速產(chǎn)生差動(dòng)來實(shí)現(xiàn)的。例如,當(dāng)位于機(jī)身前方的兩個(gè)旋翼同時(shí)加速而增加升力,同時(shí)位于機(jī)身后方的兩個(gè)旋翼減速而減小升力,此時(shí)圍繞機(jī)體軸yb軸的合力矩使無人機(jī)作抬頭動(dòng)作,如圖3所示。
通過差動(dòng)來實(shí)現(xiàn)無人機(jī)的俯仰和橫滾控制,可以減小通道間的耦合,更加便于單獨(dú)對(duì)每個(gè)通道進(jìn)行設(shè)計(jì)。設(shè)計(jì)時(shí)認(rèn)為無人機(jī)的俯仰角和橫滾角都比較小,此時(shí)雖然通過前后/左右升力的差動(dòng)產(chǎn)生相應(yīng)轉(zhuǎn)矩,但各個(gè)旋翼升力在重力方向上的分力之和變化很小,這就保證了無人機(jī)在姿態(tài)調(diào)整時(shí)不會(huì)明顯影響到無人機(jī)的高度。
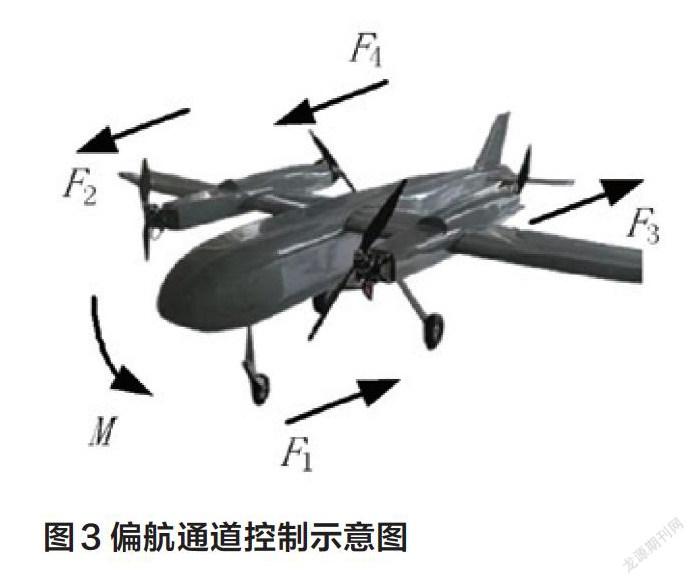
(2)偏航控制
直升機(jī)模式下的偏航控制是通過控制左右兩側(cè)舵機(jī)反向傾轉(zhuǎn),這樣四個(gè)旋翼的水平分力會(huì)產(chǎn)生一個(gè)繞z軸的力矩,進(jìn)而控制偏航姿態(tài)。左右兩側(cè)舵機(jī)反向傾轉(zhuǎn)既增大了偏航力矩,又減小了偏航與橫滾通道的耦合。同時(shí)可采用左右旋翼反向傾轉(zhuǎn),四個(gè)旋翼相對(duì)于z軸的轉(zhuǎn)矩是同向的,這就增大了偏航姿態(tài)調(diào)節(jié)的轉(zhuǎn)矩,加快了調(diào)節(jié)速度,如圖3所示。
直升機(jī)模式下位置控制方法
傾轉(zhuǎn)四旋翼無人機(jī)融合了無人直升機(jī)和固定機(jī)翼無人機(jī)的優(yōu)點(diǎn),其中平飛時(shí)飛行速度較高,但在一些特殊場合需要低速和短程飛行,此時(shí)一般采用直升機(jī)模式飛行。在直升機(jī)模式下無人機(jī)在地理坐標(biāo)系中的相對(duì)位置主要通過三種線運(yùn)動(dòng)來調(diào)節(jié),分別為高度、前向和側(cè)向運(yùn)動(dòng)。
(1)高度控制
無人機(jī)的高度控制是通過同時(shí)調(diào)節(jié)四個(gè)發(fā)動(dòng)機(jī)轉(zhuǎn)速來實(shí)現(xiàn)的。在某個(gè)平衡狀態(tài)下,四個(gè)發(fā)動(dòng)機(jī)同時(shí)加速時(shí)無人機(jī)所受升力大于重力,產(chǎn)生向上的加速度,此時(shí)無人機(jī)會(huì)向上爬升;減速時(shí)同理,通過控制無人機(jī)向上或下飛行達(dá)到控制高度的目的。
(2)前向/側(cè)向控制
無人機(jī)要進(jìn)行水平位置的調(diào)節(jié)就要有水平方向的合力產(chǎn)生相應(yīng)的加速度,由于無人機(jī)在直升機(jī)模式下,且飛行速度較低,只能利用旋翼來產(chǎn)生相應(yīng)的力,這就要求無人機(jī)產(chǎn)生一定的俯仰角/橫滾角,此時(shí)旋翼的升力會(huì)在水平方向產(chǎn)生分力。
以前向控制為例,當(dāng)無人機(jī)產(chǎn)生一定俯角時(shí),旋翼的回轉(zhuǎn)面也隨之與水平面產(chǎn)生一定的夾角,使旋翼產(chǎn)生前向的分力,從而推動(dòng)無人機(jī)向前運(yùn)動(dòng);同理當(dāng)無人機(jī)產(chǎn)生一定仰角時(shí),會(huì)推動(dòng)無人機(jī)向后運(yùn)動(dòng),側(cè)向運(yùn)動(dòng)與此類似,如圖4所示。傾轉(zhuǎn)四旋翼無人機(jī)直升機(jī)模式下的控制律設(shè)計(jì)
直升機(jī)模式下旋翼機(jī)的各部分開環(huán)傳遞函數(shù)可以線性化處理。假設(shè)一個(gè)時(shí)刻只進(jìn)行一種操作,各通道近似解耦。根據(jù)以上對(duì)控制方法的分析可知,位置控制中的前向控制和側(cè)向控制分別需要以俯仰角控制和橫滾角控制為基礎(chǔ),所以在設(shè)計(jì)控制律時(shí)要先設(shè)計(jì)姿態(tài)控制,再將姿態(tài)控制作為位置控制的內(nèi)回路對(duì)位置控制進(jìn)行設(shè)計(jì)。
姿態(tài)控制律的設(shè)計(jì)
無人機(jī)姿態(tài)控制是通過控制力矩使機(jī)體轉(zhuǎn)動(dòng)達(dá)到相應(yīng)的姿態(tài)角,必然有角加速度積分產(chǎn)生角速度和角速度積分產(chǎn)生角度的過程,所以控制系統(tǒng)的結(jié)構(gòu)采用雙閉環(huán)設(shè)計(jì)。內(nèi)回路為角速率回路,外回路為角度回路。由雙閉環(huán)控制系統(tǒng)設(shè)計(jì)經(jīng)驗(yàn),內(nèi)回路帶寬較寬,可以有效地抑制干擾,內(nèi)環(huán)帶寬要遠(yuǎn)大于外環(huán)帶寬,一般的控制回路都需要校正,這里采用經(jīng)典PID控制。
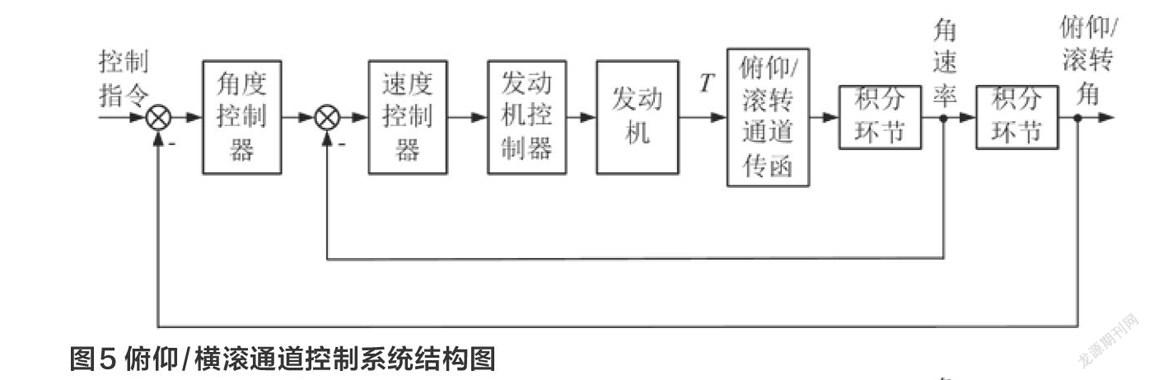
(1)俯仰/橫滾通道控制律設(shè)計(jì)
俯仰/橫滾通道控制系統(tǒng)結(jié)構(gòu)如圖5所示,控制指令經(jīng)過兩個(gè)控制器,控制發(fā)動(dòng)機(jī)的轉(zhuǎn)速,在不同轉(zhuǎn)速下旋翼提供不同的升力,升力以旋翼氣動(dòng)中心到xb和yb軸距離作為力臂得到力矩,使機(jī)體旋轉(zhuǎn),輸出量為角加速度,經(jīng)過積分環(huán)節(jié)后轉(zhuǎn)化為俯仰/橫滾角度輸出。
(2)偏航通道控制律設(shè)計(jì)
偏航角回路控制結(jié)構(gòu)如圖6所示,偏航角控制是通過控制左右兩側(cè)舵機(jī)反向傾轉(zhuǎn),此時(shí)旋翼的升力在水平方向的分力會(huì)產(chǎn)生一個(gè)繞機(jī)體坐標(biāo)系z(mì)軸的力矩,從而改變偏航姿態(tài)角。假設(shè)某個(gè)旋翼拉力為F,相應(yīng)舵機(jī)傾轉(zhuǎn)角為β,則該升力在水平方向上的分力為Fsinβ,由于β變化范圍較小,可以限制在精度允許的范圍內(nèi),此時(shí)可以將旋翼拉力F在水平方向的分力做以下線性近似
Fsinβ≈Fβ
(18)
位置控制律的設(shè)計(jì)
相對(duì)于無人機(jī)的姿態(tài)控制,無人機(jī)的穩(wěn)定性對(duì)其位置控制的要求比較低,允許存在比較大的超調(diào)和較長的調(diào)節(jié)時(shí)間,根據(jù)設(shè)計(jì)經(jīng)驗(yàn),水平位置控制的開環(huán)傳函階數(shù)較高,在校正時(shí)難以嚴(yán)格控制超調(diào)和調(diào)節(jié)時(shí)間,故在位置控制律的設(shè)計(jì)中均采用單閉環(huán)結(jié)構(gòu)。
(1)高度控制
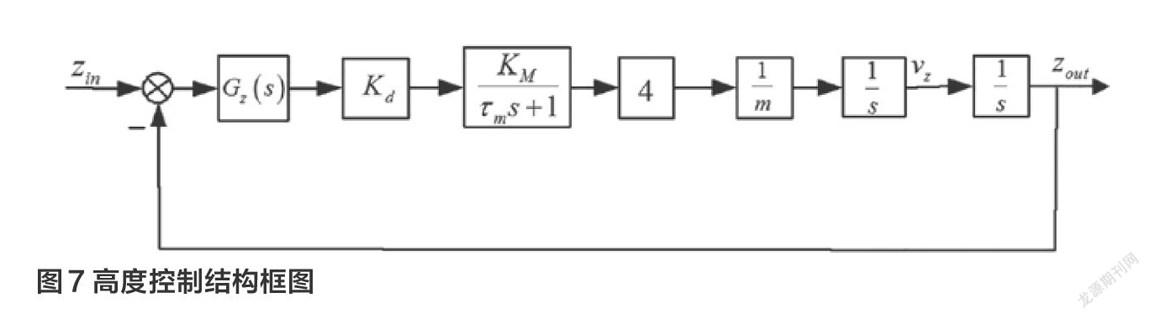
傾轉(zhuǎn)四旋翼無人機(jī)是通過控制四個(gè)發(fā)動(dòng)機(jī)同時(shí)加減速,從而改變高度方向的加速度來實(shí)現(xiàn)高度控制的。在直升機(jī)模式下機(jī)體所受空氣阻力很小,旋翼拉力與垂直加速度的關(guān)系可以表示為
直升機(jī)模式下俯仰/橫滾角很小或在調(diào)節(jié)高度前將俯仰,橫滾角調(diào)節(jié)到很小,所以線性化后高度方向的加速度為az= 4F/m,可得高度控制=系統(tǒng)結(jié)構(gòu)如圖7所示。
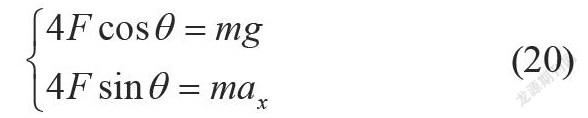
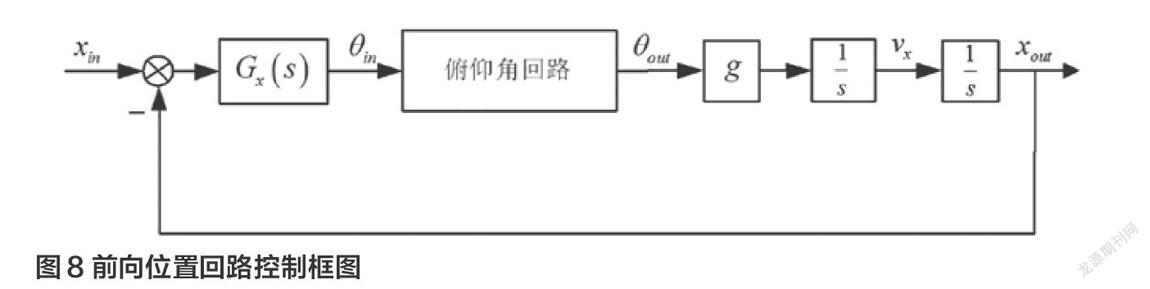
(2)水平位置控制
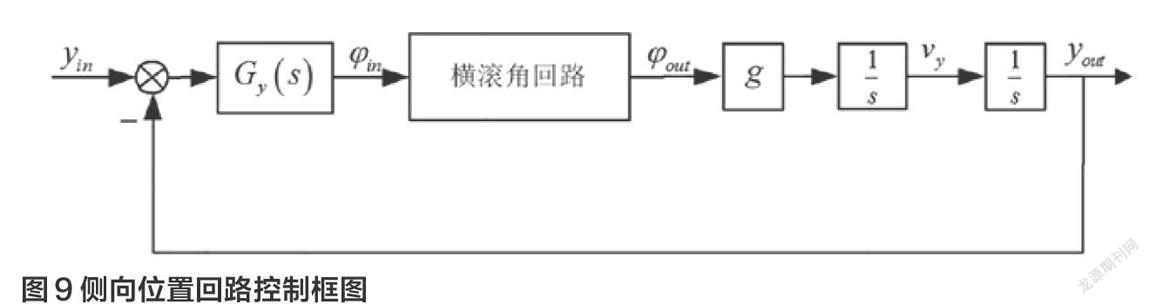
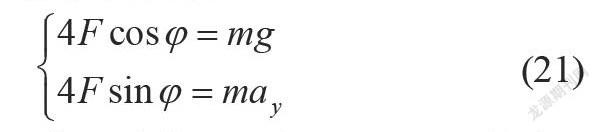
無人機(jī)的水平位置是通過前向位置和側(cè)向位置來確定的,相當(dāng)于一個(gè)二維平面,因此其控制包括前向位置和側(cè)向位置兩個(gè)回路。無人機(jī)要進(jìn)行水平位置的調(diào)節(jié)就要有水平方向的合力產(chǎn)生相應(yīng)的加速度,為了簡化分析,不考慮各回路間的耦合。前向運(yùn)動(dòng)分析如下,假設(shè)無人機(jī)處于固定高度,并且橫滾角為零,則無人機(jī)在縱向平面內(nèi)的受力分析為
結(jié)論
本文主要對(duì)傾轉(zhuǎn)四旋翼無人機(jī)在直升機(jī)模式下的控制方法進(jìn)行了研究。通過對(duì)傾轉(zhuǎn)四旋翼無人機(jī)進(jìn)行數(shù)學(xué)建模,確定了傾轉(zhuǎn)四旋翼無人機(jī)姿態(tài)控制方法和位置控制方法,并建立了傾轉(zhuǎn)四旋翼無人機(jī)各個(gè)控制回路的結(jié)構(gòu)框圖,設(shè)計(jì)了相應(yīng)回路的控制律,相關(guān)方法可為傾轉(zhuǎn)四旋翼無人機(jī)的基礎(chǔ)研究提供一定參考。
(參考文獻(xiàn):略。如有需要請(qǐng)聯(lián)系編輯部)
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
