船載系留式多旋翼無人機總體設計與使用研究
2019-09-10 21:44:09王雷計世勛
無人機 2019年3期
關鍵詞:設計
王雷 計世勛

設計了一種用于船載使用的系留式多旋翼無人機系統,對總體參數優化、系留纜、地面一體機、定點跟隨等關鍵技術難點進行了分析,區分任務前檢查、設備部署展開、無人機起降三個階段梳理了系統使用流程。
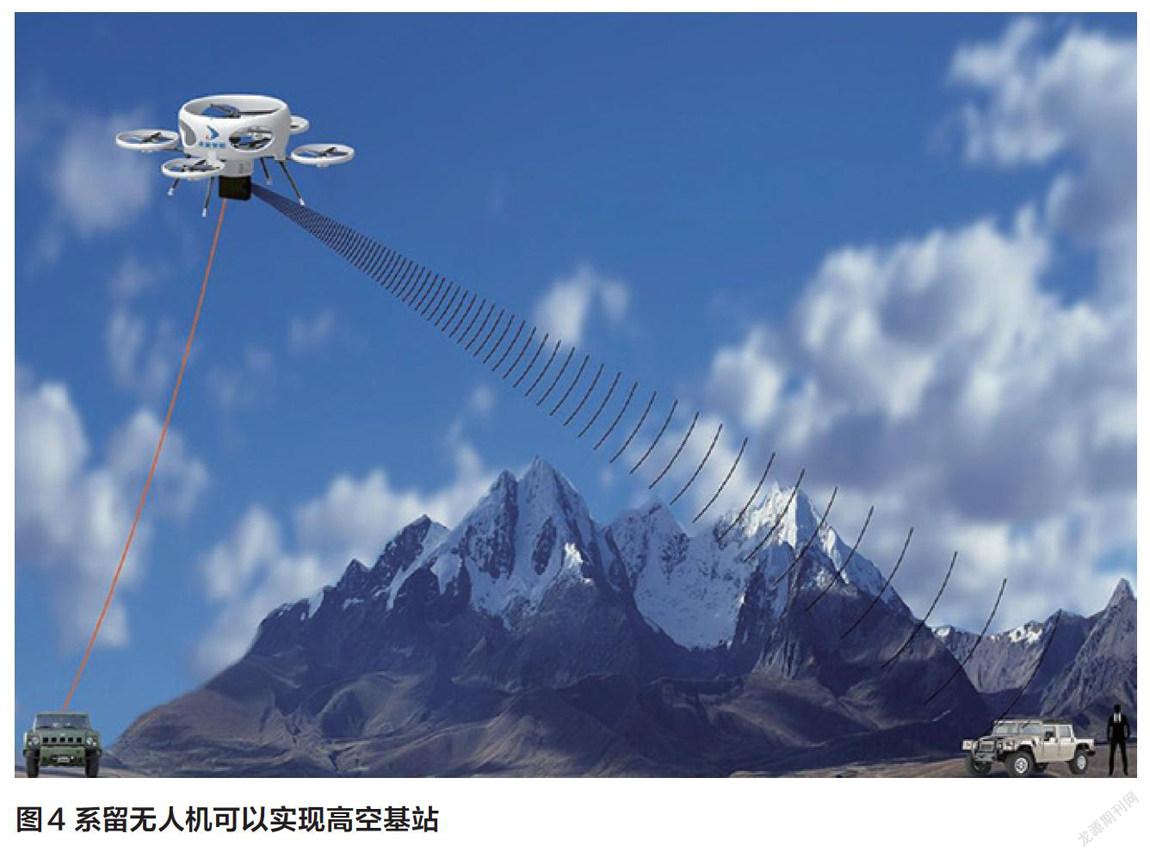
多旋翼無人機是一種具有自動垂直起降、超低空巡航、空中定點懸停和繞點飛行等功能特點的新型無人飛行器。系留式多旋翼無人機區別于自由飛式機型,它采用系留線纜給飛行平臺源源不斷提供電能,可實現無人機長時間滯空。系留纜為光電復合線纜,內部有單根或者多根單模光纖,可實現私密高速數據傳輸以及更安全的無人機控制數據鏈路。基于其續航時間長、保密性能好等特點,將其加裝于船載動平臺上,將可實現長時間視頻監控或無線組網等功能。
系統工作原理
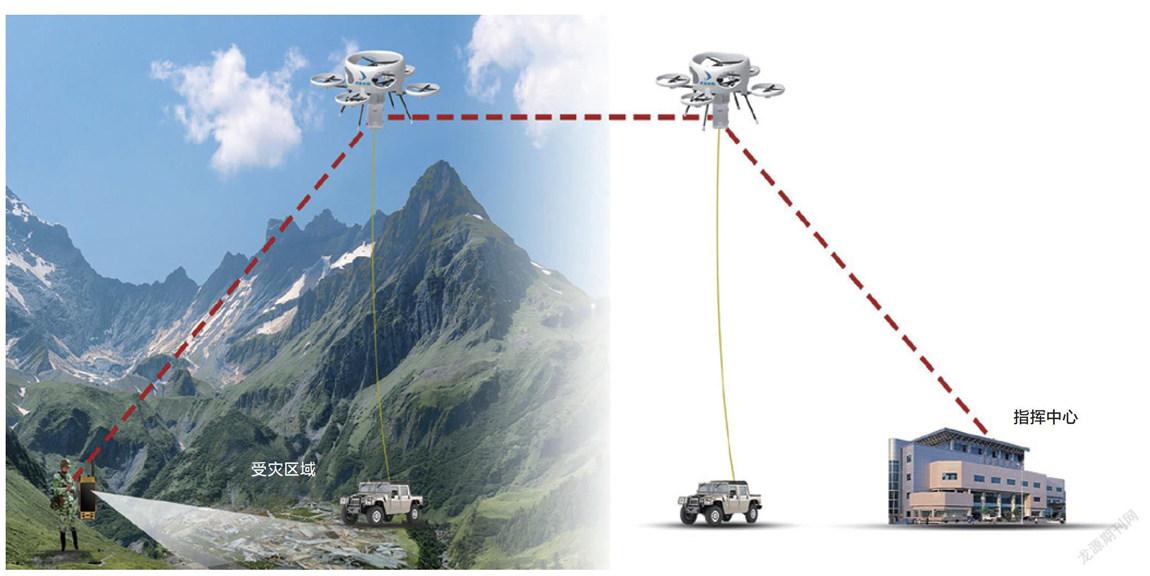
船載系留觀測平臺利用系留無人機掛載攝像吊艙,應用監視測量技術,在通信鏈路上傳輸攝錄到的圖像。無人機可實現自主起降,自動收放線,地面供電系統可對無人機進行長時間供電,保證任務的執行。系統由多旋翼無人機、纜繩收放設備、地面高壓電源、測控地面站、導航定位差分基站和附屬配套設備等組成,如圖1所示。
根據需要,可以在系留無人機上搭載不同的光電監測設備(如光電吊艙、傾斜相機、雷達等)。艦船裝載系留無人機系統到達作業地點后,操作人員控制其起飛并進行作業。從空中對海面目標進行監視、探測,并將得到的監測信息通過光纖信道經由動中通設備傳輸到遠端指揮中心,實現視頻、數據和控制指令的雙向交互,做到指揮中心與現場的“零距離”管理和指揮。
關鍵技術分析
總體參數優化
飛行器的總體布局是實現飛行器性能指標和技術使用要求的重要環節,并為全機詳細設計提供依據。系留型多旋翼的主要飛行科目為懸停和小速度前飛,因此在槳尖速度、槳盤實度等總體參數選擇時,應以該狀態的功率作為優化目標。當系留多旋翼伴隨載體平臺大速度跟隨飛行時,氣動阻力消耗功率約占總功率30% - 50%。從多旋翼構型分析,機身是構成阻力的主要部分,對其整流、減小結構過渡區的壓差阻力、機身最大橫截面。另外一個約束是操穩特性方面,應保證多旋翼飛行器具有一定的迎角穩定性、速度靜穩定性和角速度阻尼等,并在飛行狀態改變時,作用在多旋翼的力矩不產生突變,從旋翼與重心的位置、輔助旋翼與主旋翼的拉力分配關系方面,改善操縱響應。
系留纜設計
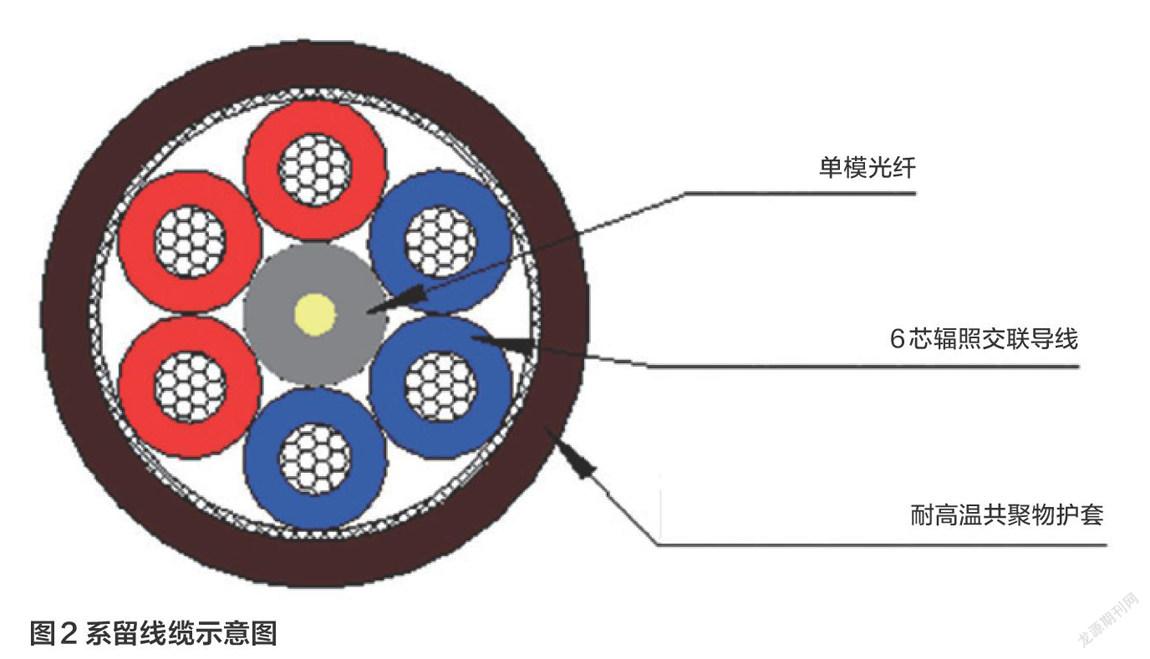
系留線纜采用1光6電復合纜設計,既負責電能的輸送,同時也要通過其中的光纖傳送信號,如圖2所示。
系留纜應具有耐反復卷繞收放,工程化程度高;環境適應性好,耐鹽霧、耐濕熱、耐高低溫、耐低氣壓、耐紫外,防雨水;傳輸電流大,可以光電混裝;耐電壓值高、絕緣電阻高;抗拉力大,柔軟,適合反復收放、彎曲和拉伸等功能。
基于以上考慮,本系統采用輕型合金導體及航空線纜以減輕重量,設計耐壓值可以抗5000V高壓不被擊穿;線纜絕緣材料使用機器人線纜的高溫塑料,可以承受長時間的反復彎曲;該線纜的抗拉力由專用的超高強度纖維來承擔,抗拉力大于50kg以上;可以通過額定14A的高壓直流電;線纜內部包含抗微彎光纖,可提供優良的光傳輸性能,配合光電轉換終端可提供高清視頻、千兆網絡等接口,可以傳輸高清視頻及控制信號,抗干擾能力強。
地面一體機設計
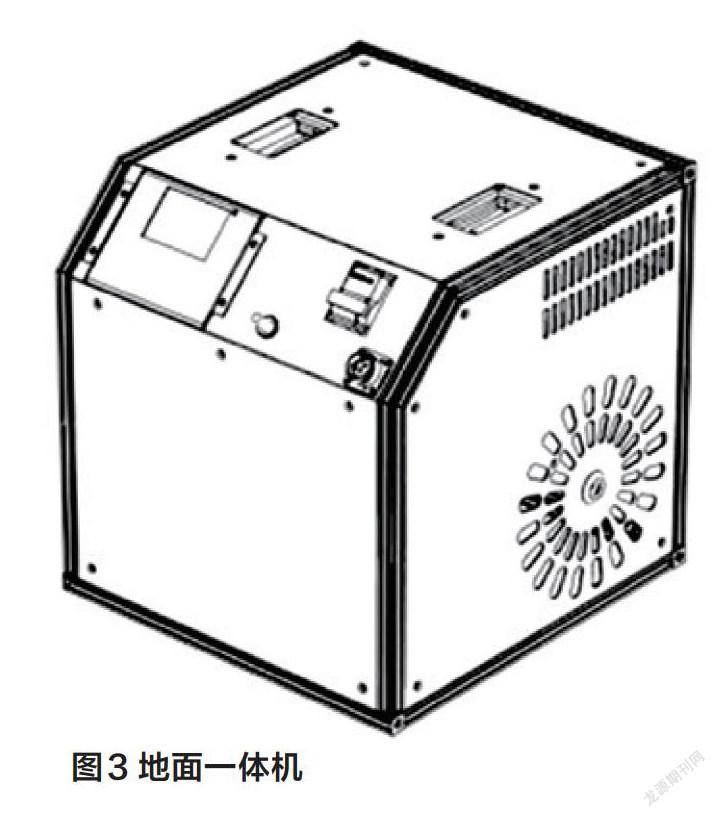
地面一體機負責無人機起降時的線纜自動收放控制以及將發電機輸送過來的交流電轉化為高壓直流電。其中箱內安裝有系留線纜收放控制機構和地面電源模塊,分別用于實現無人機起降時的線纜自動收放控制以及將發電機輸送過來的交流電轉化為高壓直流電,如圖3所示。
由于系留無人機系統需要根據無人機空中平臺的狀態自動收放系留線纜,因此專門設計了智能化的線纜收放控制機構,采用進口電機及進口傳感器,保證系統的穩定性和控制精度。無人機起降時自動收放線,通過傳感器精確測量線纜長度,并根據飛行高度自動控制收放線的速度,同時精確測量線纜拉力,根據無人機拉力自動調節力矩,保證線纜有一定張力。在無人機小范圍晃動時,通過緩沖裝置保證線纜的平滑收放控制,收線時自動排線,保證線纜均勻的纏繞在轉軸上。
地面端AC/DC電源模塊將發電機輸出的交流電轉化為穩定可靠的直流電,通過系留電纜輸送到機載端,供無人機使用。采用220V交流電轉化為400V直流電輸電模式,進行輸出過流及短路瞬時保護及故障隔離、輸入過欠壓瞬時保護及故障隔離、輸出過壓瞬時保護及故障隔離以及過溫保護設計。
定點跟隨設計
系留式多旋翼無人機在進行自主起降時,對回收箱的相對位置有較高要求,尤其在船上使用時,載體隨風浪的搖擺和升降會使回收難度加大。利用載波相位差分技術,以地面設備的DGPS作為參考站,與機載DGPS做差分計算,通過無人機數據鏈交換差分校正數據,差分定位的結果分別送到自動駕駛儀和地面控制站,保證無人機平穩跟隨及著陸。為提高系統的魯棒性,還可以同時使用無線電高度表或激光高度表等,也可采用與其它傳感器進行復合計算定位的方法。
系統使用流程研究
執行任務前檢查
首先操作人員檢查機載備用電池容量是否充足,然后檢查機載設備的各連接插頭,確保無松動情況,接下來將無人機與地面站連接,并通電測試,確保飛控系統工作正常,最后測試線纜收放機構是否正常工作。
設備部署展開
將系留無人機放置在相對水平的平面上,將折疊機臂展開并鎖緊,將線纜插頭與無人機上的插頭連接并鎖緊,啟動發電機開始工作,開啟地面站電源,啟動地面站操作軟件。檢查機體以及各部件的狀態是否符合飛行條件,啟動無人機電源,開啟飛控系統,飛控啟動自檢程序,檢查飛控系統與各機載設備之間連接是否正常,檢查地面站與無人機飛控系統通訊是否正常,機載設備回傳的各項參數指標是否正常,開啟任務載荷電源,檢查任務載荷工作是否正常。
無人機起降
可在地面站軟件中設置無人機懸停高度,點擊“起飛”按鈕,無人機自動起飛,上升至對應高度后懸停。啟動任務載荷開始工作,過程中觀察地面站界面上顯示的無人機各項參數是否正常。需要改變無人機懸停高度,則重新在地面站中輸入高度值,無人機自動上升、下降來改變懸停高度;若想改變無人機航向,則重新在地面站中輸入航向角值,無人機自動原地轉向,調整機頭指向期望航向。
任務執行完畢后,在地面站軟件中點擊“降落”按鈕,無人機自動降落至起飛初始位置;通過遙控器鎖定飛控系統,可根據需要再次起飛。降落時重復起飛前檢查的所有項目,關閉任務載荷電源,關閉無人機電源,斷開與地面電源的連接,關閉發電機,將無人機機臂折疊后放入航空收納箱。
結束語
系留式多旋翼無人機在有人船上的應用,國內外研究及實踐較多,其實施相對容易。而在無人船(艇)上的使用尚處于工程試驗階段,面臨的技術問題也更為復雜,本系統設計對相關研究具有一定借鑒意義。
(參考文獻:略。如有需要,請聯系編輯部。)
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
