激波風洞邊界層轉捩測量技術及應用
2019-09-11 06:59:22李強江濤陳蘇宇常雨趙磊張扣立
航空學報 2019年8期
李強,江濤,陳蘇宇,常雨,趙磊,張扣立
中國空氣動力研究與發展中心 超高速空氣動力研究所,綿陽 621000
高超聲速邊界層轉捩現象是一個極其復雜的、具有強烈的非定常、非線性、對干擾極其敏感的三維過程,是一直沒有得到解決的流體力學重大研究課題。由于邊界層轉捩問題的復雜性,至今尚未形成完整的轉捩理論。高超聲速邊界層轉捩用理論或計算方法難以準確預測。在工程應用上,模擬轉捩流動大都依賴于由試驗總結出的經驗準則,基于線性穩定性理論(LST)的半經驗eN方法[9-10]被認為是預測邊界層轉捩的一個有效方法。但該方法嚴重依賴于試驗或經驗,僅對二維或近似二維問題效果較好,對三維流動其應用結果并不令人滿意。對于高超聲速邊界層轉捩,如果沒有試驗數據和經驗的幫助,則不能很好地進行基于理論的轉捩及流動失穩預測。美國在20世紀70年代,開始研制能在大氣層中做長距離飛行的高超聲速飛行器,并同步開始重視高超聲速邊界層轉捩預測研究。他們采用理論、計算、試驗(包括風洞和飛行試驗)高度結合的方法,積累了大量的結果[11-12]。
國內近幾年開始進行一些高超聲速邊界層轉捩研究工作,其中激波風洞作為高超聲速氣動熱環境試驗研究的主要地面模擬設備,模擬范圍大、模擬能力強、模型尺度大、測量手段多,是研究高超聲速邊界層轉捩的重要設備。激波風洞來流擾動較強、背景噪聲較大,相比于靜音環境,噪聲環境會使得模型轉捩雷諾數增大,轉捩位置提前。2018年楊武兵等[13]采用測量風洞流場皮托壓力脈動的方法,獲得中國空氣動力研究與發展中心?2 m激波風洞(FD-14A)馬赫數6(M6)流場風洞噪聲水平大約為3%,M10流場風洞噪聲水平大約為4.5%;在M5和M6運行條件下,國內幾座用于轉捩研究的風洞背景噪聲均在1%~3%左右(包括中國航天空氣動力技術研究院FD-07常規高超風洞、FD-20炮風洞/激波風洞,中國空氣動力研究與發展中心FD-30?1 m常規高超風洞)。文獻[14-16]顯示美國NASA蘭利中心20InchM6風洞噪聲水平大約為1%~1.5%,美國阿諾德工程中心(AEDC)9號風洞M10流場噪聲水平大約為4.94%。因此包括?2 m激波風洞(FD-14A)在內的國內高超聲速風洞噪聲水平與美國相關高超聲速風洞噪聲水平相當,都在百分之幾量級。
激波風洞用于研究高超聲速邊界層轉捩,需要發展適用的轉捩測量技術。高超聲速邊界層轉捩測試技術很多[13],都是依據邊界層轉捩過程中的熱流、壓力、密度、速度等物理特征的變化來判斷轉捩,目前適用于激波風洞高馬赫數流場特點(氣流速度高、氣體密度低、毫秒量級試驗時間)的高超聲速邊界層轉捩測量技術主要有依據熱流變化的點熱流轉捩測量技術和溫敏熱圖轉捩測量技術,依據壓力變化的高頻脈動壓力測量技術和密度變化的高清晰度紋影測量技術等。本文發展了激波風洞原有的點熱流和溫敏熱圖測量技術,明確了轉捩判斷標準;以PCB132型高頻脈動壓力傳感器為基礎,發展了1 MHz量級的高頻脈動壓力測量系統及其數據處理分析方法;通過升級紋影儀和高速相機來提升紋影系統空間分辨率和時間分辨率的方式,發展了高清晰度紋影測量系統及其圖像處理分析方法。
1 點熱流轉捩測量技術
點熱流測量技術主要采用鉑薄膜熱流傳感器來測量熱流,其原理是以鍍在絕緣基底上的鉑膜作為測溫電阻膜測量溫度變化,利用熱電模擬網絡獲得被測物體表面熱流密度,其穩定性好、測量范圍大、反應快、靈敏度高、精度高、重復性好、靜態標定及使用簡單可靠,是高超聲速氣動熱環境風洞試驗中的重要測量手段[17-18]。邊界層從層流轉捩成湍流后,會導致壁面熱流升高,從而可以根據多只熱流傳感器測量的熱流分布來判斷轉捩位置,一般認為熱流開始升高的位置即為開始轉捩位置。
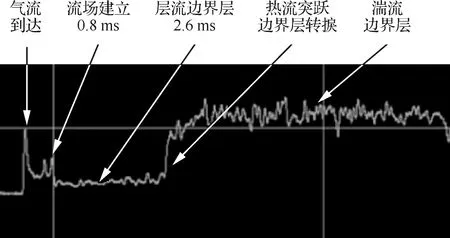
圖1 單個測點熱流隨時間變化典型曲線Fig.1 Typical curve of heat flux over time at a single measuring point
邊界層流態與單個測點熱流曲線特性存在一定關聯。圖1給出了某個熱流傳感器測量得到的熱流隨時間變化典型曲線,其中最左側的熱流突躍對應風洞氣流到達傳感器所在位置,氣流開始對傳感器傳熱。隨后經歷大約0.8 ms,模型周圍形成穩定的繞流流場包括頭激波和層流邊界層的建立;層流邊界層穩定流動大約2.6 ms,其中發生擾動線性增長等過程,但此時熱流數值幾乎穩定不變;隨后該傳感器位置處的層流邊界層失穩轉捩成湍流邊界層,熱流曲線上表現出來的就是圖1中的熱流突躍。最后傳感器位置處變成湍流邊界層,明顯可見湍流邊界層熱流脈動比層流邊界層強,這是湍流邊界層中多尺度渦所引起的熱流脈動;該傳感器位置最終為湍流區,對于最終位于轉捩區的傳感器,其熱流曲線不會出現熱流突躍,會出現湍流斑導致的強烈脈動熱流,對于最終位于層流區的傳感器,其熱流曲線既不會出現熱流突躍也不會出現脈動熱流,但層流、轉捩、湍流3種狀態之間沒有絕對的界限,是一個漸進變化的過程。需要說明的是,風洞試驗中模型及其傳感器是靜止的,邊界層氣流沿軸向從頭部向底部流動,圖1中單個測點熱流隨時間變化曲線,記錄的是某時刻經過傳感器的流體微團對傳感器傳導的熱流;不同條件下熱流傳感器測得的熱流曲線不完全一致,會根據馬赫數、雷諾數、模型外形、邊界層流態等因素而變化。
因此可以依據熱流原始曲線判斷傳感器所處位置邊界層流態。如圖2所示,單點熱流曲線與邊界層流態對比,圖2(a)熱流曲線比較平滑,傳感器位置處邊界層在風洞有效試驗時間范圍內沒有發生轉捩,此處邊界層最終為層流流態;圖2(b)、圖2(c)所示流體氣動加熱作用增強,熱流曲線受湍流斑的影響出現不同程度的脈動現象,此處邊界層發生轉捩但未完成轉捩,最終為轉捩區;圖2(d)邊界層先經過層流邊界層階段,隨后發生轉捩,熱流曲線突躍上升到一定值并保持相對穩定,此處邊界層最終完成轉捩為湍流。邊界層流態變化引起流體氣動加熱程度發生變化,依托單點熱流曲線時變特性及沿流向熱流空間分布特性體現這一變化影響,這正是薄膜熱流傳感器判斷轉捩的依據。
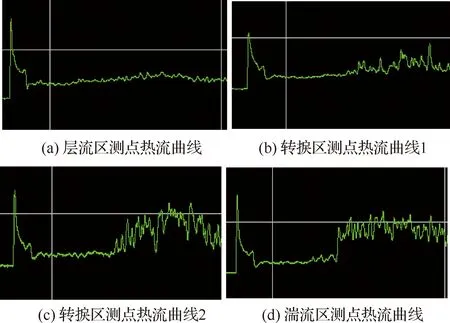
圖2 單點熱流曲線與邊界層流態對比Fig.2 Comparison of heat flux curves and boundary layer flow state at single point
熱電偶也是用于激波風洞等氣動熱環境試驗的重要點熱流測量傳感器,其用于高超聲速邊界層轉捩測量的方法與鉑薄膜熱流傳感器基本相同。不同點主要是熱電偶一般用于較高熱流測量,其信噪比較低,因此在較低熱流條件下無法通過單只傳感器的熱流曲線判斷邊界層轉捩情況。但點熱流轉捩測量技術主要是依據熱流沿流向空間分布特性來判斷轉捩,單點熱流曲線時變特性用來輔助判斷。
14日,兩條顯示為中國外交部部長王毅發布的推文截圖開始廣泛流傳。截圖顯示,闡明中國外交部對瑞典警察粗暴對待中國公民態度時,第一條推文錯將一處“瑞典”(Sweden)寫成了“瑞士”(Swiss)。隨后第二條推文就這一錯誤致歉。這一“失誤”很快引來互聯網上的另一波瘋狂轉發,并又給了一些網友“解構”瑞典事件的某種“合理想象”。
2 溫敏熱圖轉捩測量技術
溫敏熱圖(TSP)測量技術[17-20]是一種大面積熱流測量技術,它是利用溫敏材料的光致發光特性隨溫度變化而變化的特點來進行模型表面溫度分布測量的光學測量技術。其原理是在模型表面噴涂溫敏磷光材料,以大功率紫外光源作為激發光源對模型進行照射,通過相機采集模型表面特定波段的發光強度,根據標定得到的光強與溫度關系,獲得試驗時模型表面的溫度分布,進而獲得大面積熱流分布。在激波風洞進行邊界層轉捩試驗研究,邊界層流態由層流轉捩到湍流,流體的動量和能量輸運能力增強,層流與湍流邊界層傳熱效率的差異,體現在氣動熱上即是使得物面熱流明顯升高。對試驗中得到的圖像進行量化分析,得到模型表面大面積溫度和熱流分布,根據層流與湍流邊界層傳熱效率的差異,對模型表面邊界層轉捩情況進行分析,得到轉捩位置。
圖3是在激波風洞開展的某平板邊界層轉捩試驗研究中的溫敏熱圖測量結果,定性展示平板模型表面邊界層轉捩情況,圖中藍色顯示為低熱流區域,邊界層為層流流態;黃色為高熱流區域,邊界層為湍流流態。在平板上安裝了6支熱流傳感器,對溫敏熱圖試驗結果進行對比驗證。根據鉑薄膜熱流傳感器單點熱流曲線,可以看到前兩個測點為層流狀態,后4個測點為湍流狀態,這與溫敏熱圖的測量結果相一致。圖4是某錐模型溫敏熱圖測量結果,定性展示了錐模型表面邊界層轉捩情況,黃藍色為低熱流區,邊界層是層流流態,紅色為高熱流區,邊界層是湍流流態。
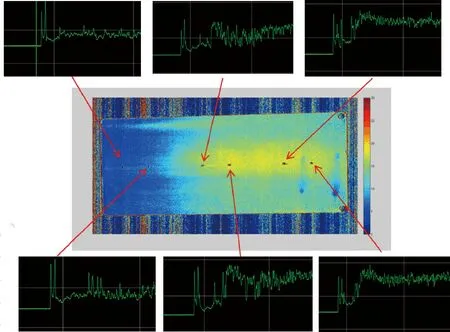
圖3 平板模型溫敏熱圖測量結果Fig.3 Test results of TSP on a flat model
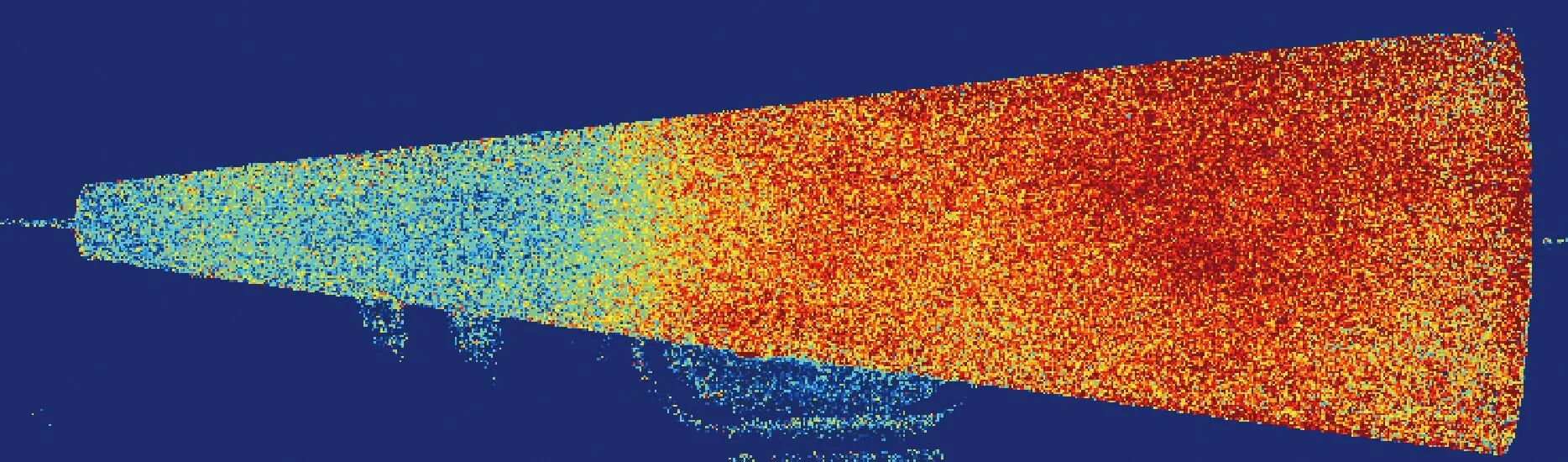
圖4 錐模型溫敏熱圖測量結果Fig.4 Test result of TSP on a cone model
3 高頻脈動壓力測量技術
對于細長二維或軸對稱外形的高超聲速繞流流動,控制不穩定流動的典型模態是第2模態或Mack模態[21]。在邊界層內,第2模態波傳播速度與邊界層外緣氣流速度接近,波長近似為邊界層厚度的兩倍,第2模態波控制頻率范圍大致為100 kHz~1 MHz[22-23]。精確測量高頻不穩定波特性具有挑戰性,在很多冷流高超聲速風洞試驗中,表面齊平安裝傳感器的成功應用顯示這一技術具有一定的應用前景。Fujii[24]第1次將快速響應壓力傳感器應用到1 MHz以下第2模態波測量,在激波風洞試驗中獲得成功。
傳感器是實現高頻壓力測量的關鍵。為能夠在脈沖風洞實現邊界層轉捩測量,需要壓力傳感器具有快速響應、高靈敏度、高固有頻率等特性。快速響應特性滿足激波風洞毫秒量級試驗需求;高靈敏度特性能夠有效捕捉微小壓力脈動信號;高固有頻率特性能夠捕捉高頻壓力脈動信息。目前,能夠滿足需求的傳感器只有PCB類型高頻壓電傳感器,傳統型號為132A31型,新型號為132B38型。國外風洞試驗中大量應用PCB 132型壓力傳感器[22,14-15,22,25-28]測量得到了第2模態不穩定波。
PCB132A31型壓力傳感器固有頻率超過1 MHz,目前激波風洞配套的數據采集處理系統采集頻率可達3 MHz,采集精度優于0.1%。如圖5所示,采用搭建的高頻脈動壓力測量系統獲得錐模型表面高頻脈動壓力原始信號及功率譜密度結果,圖中:t為時間、U為電壓,這是PCB高頻脈動壓力傳感器獲得的原始信號,f為頻率、PSD(Power Spectrum Density)為功率譜密度。

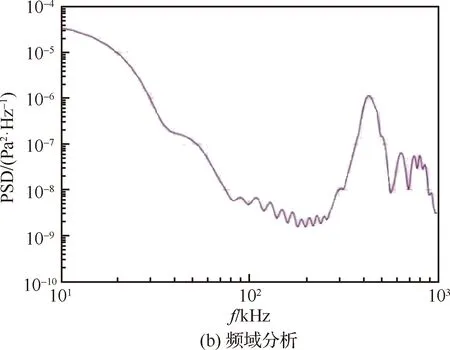
圖5 PCB脈動壓力測量結果及PSD結果Fig.5 Results of measurement and PSD of PCB pressure fluctuation
數采系統測量得到的是壓力信號隨時間變化曲線,對PCB壓力傳感器時域壓力信號進行頻譜變換,可得到壓力信號頻域曲線,進而分析壓力信號的頻譜特性。壓力信號的能量隨頻率分布是頻率域描述的一個重要部分,它提供了壓力信號的頻率結構。通常,通過計算PSD來分析,計算PSD通過Welch方法基于MATLAB集成函數實現。這一方法將時域壓力信號分成多段,先計算每段的周期圖,之后進行PSD平均處理,計算時需要設置數據重疊Overlap、計算周期圖的加權窗Hamming window、快速傅里葉變換(FFT)長度等。如圖5所示,對高頻脈動壓力時域信號進行功率譜分析,獲得頻域信號,該傳感器獲得的頻域信號顯示邊界層不穩定波的主頻為433.6 kHz。
4 高清晰度紋影顯示技術
激波風洞等高超聲速風洞均配備陰/紋影等流場顯示系統,并應用此類技術開展常規高超聲速繞流流場顯示工作,得到飛行器繞流流場波系分布。對于邊界層流動特性研究來說,需要針對高超聲速細長、薄邊界層流動區域進行顯示,目前的紋影系統在空間和時間分辨率上,還達不到研究要求。為此,需要針對邊界層流場特點、流動特性及轉捩研究需要,對流場顯示光學系統進行技術改造和性能提升。
高超聲速邊界層流場細長、薄,為實現邊界層流場精細清晰顯示,需要提高流場顯示的空間分辨率。?2 m激波風洞配備的紋影儀為滿足全模型顯示而設計,視場為?400 mm,細節分辨不夠清晰;光路為“Z”字型離軸反射式,像差較大、成像質量較低。在國外的研究工作中[22-23,29-31],所用視場通常為100~180 mm,專門對感興趣區域進行顯示。根據邊界層流動顯示要求,需要對邊界層細長流動進行針對性顯示,國外研究選擇視場也是基于這一考慮,因此配置了一套?200 mm的透射式紋影儀,主要由光源、狹縫、主鏡、刀口、鏡頭、相機和支撐調整機構組成,光路如圖6所示,L1為透鏡1,L2為透鏡2。配備的相機分辨率為1 024 pixel×1 024 pixel,空間分辨率可達到5 pixel/mm,主鏡為雙膠合透鏡,可消除各種像差、提高清晰度。激波風洞流場密度相對較低,且流速較快,為捕捉高速流場特征,需提高時間分辨率,使用高速相機作為圖像采集設備,配合高亮度光源,相機曝光時間為160 ns,拍攝頻率為100 kHz,可避免圖像拖影,捕獲結構變化過程及分析頻率。采用刀口自動定位系統進行紋影靈敏度的準確調整,挑選合適的靈敏度用于顯示邊界層結構。

圖6 紋影儀光路圖Fig.6 Optical sketch of schlieren system
采用上述升級的紋影系統在?2 m激波風洞中拍攝獲取的紋影圖像如圖7所示,給出了錐模型表面邊界層4種典型的紋影圖像。第1幅圖像邊界層為層流狀態,由像素可求出邊界層厚度,該邊界層厚度是密度梯度厚度;第2幅圖像邊界層出現了明顯的第2模態波即“繩狀波”,這是由某種擾動在邊界層中發展而成的不穩定波,由像素可求出其波長,將在下文中給出算例;第3幅圖是第2模態波失穩猝發而成的湍流斑,湍流斑的出現意味著邊界層開始轉捩,在高速相機以10 μs間隔連貫拍攝的圖像中,可以觀察到第2模態波失穩變成湍流斑的過程;第4幅圖像邊界層為湍流狀態,當湍流斑出現頻率加快并前后連貫起來,則從高速相機連續圖像中判定邊界層完成轉捩,圖像中可以明顯分辨湍流邊界層比層流邊界層厚,并且可見明顯的擾動從湍流邊界層傳播開來。
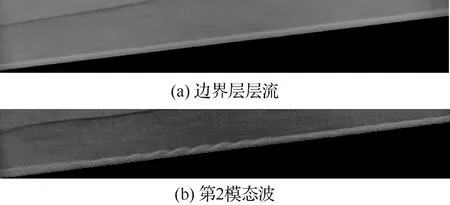
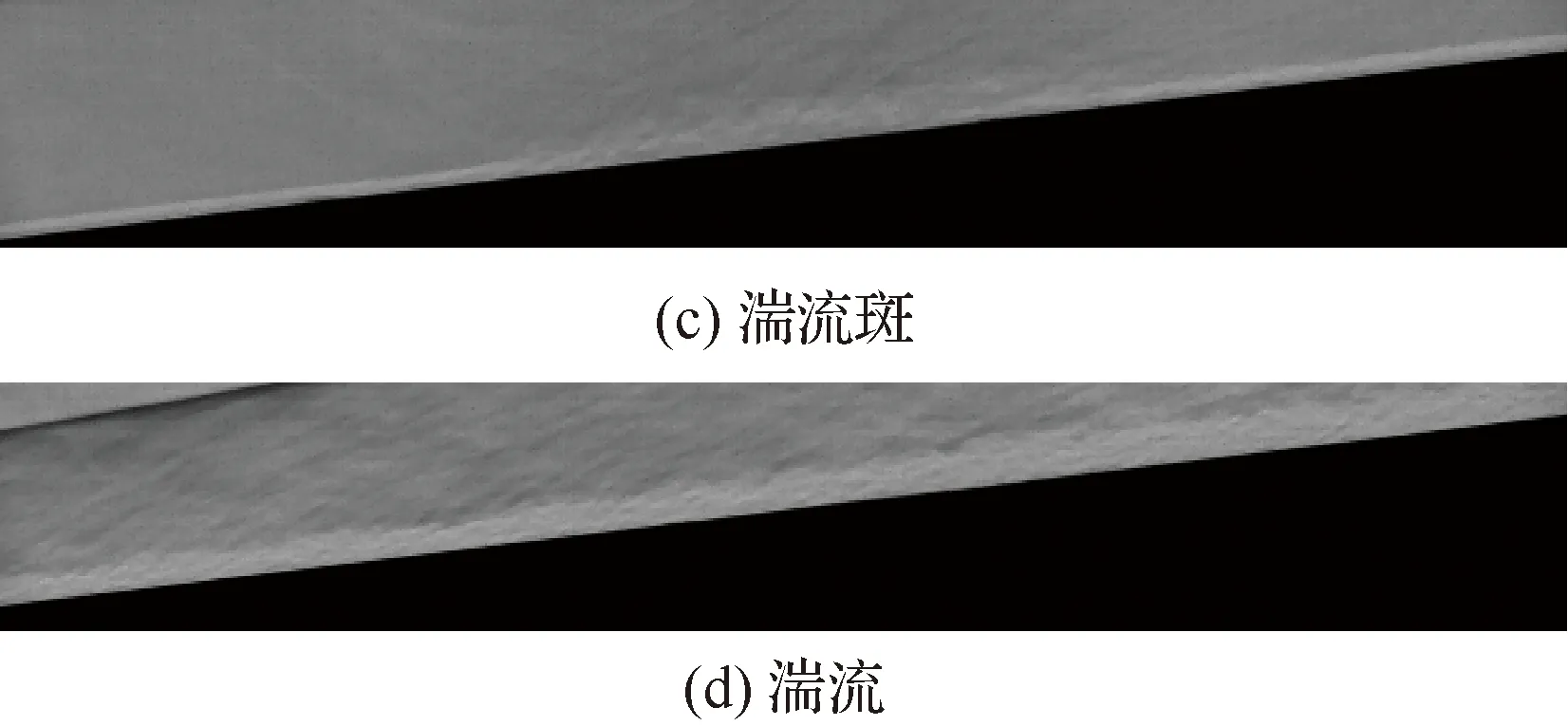
圖7 4種模態紋影圖像Fig.7 Schlieren images of four modes
5 尖錐試驗結果
5.1 尖錐試驗條件
尖錐試驗模型如圖8所示,模型頭部鈍度為0.05 mm,理論尖點距模型底部800 mm,模型半錐角為7°。沿模型0°母線安裝8個PCB高頻脈動壓力傳感器,第1個傳感器軸線與模型母線交點沿模型軸向距模型理論尖點125 mm,以后各傳感器間距80 mm,8只PCB傳感器與熱流傳感器位置關系如圖9虛線標示。90°母線上,從x=125 mm(x是沿模型軸線至理論尖點的距離)位置處開始,間隔20 mm安裝32個熱流傳感器。試驗流場馬赫數為10,單位雷諾數1.2×107m-1,靜壓為352 Pa,靜溫為44 K,氣流速度為1 352 m/s。200 mm紋影儀視窗中尖錐模型母線范圍約為x=293.8~467.5 mm(圖9實線標示范圍),該段母線中點x=380.7 mm。而4#PCB脈動壓力傳感器安裝位置(x=365 mm)與該中點截面最接近,相同截面位置熱流傳感器為13#測點,因此下文中將選取4#PCB脈動壓力傳感器和13#熱流傳感器測量結果,與紋影結果及理論分析結果進行對比。

圖8 7°尖錐模型Fig.8 7° half-angle cone model
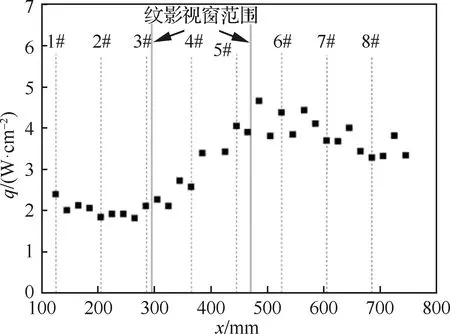
圖9 尖錐模型表面熱流分布Fig.9 Heat flux distribution on cone model surface
5.2 熱流測量結果
如圖9所示,熱流傳感器測量獲得尖錐模型表面沿母線的熱流q分布情況,從圖中可以明確在該流場條件下,尖錐模型表面邊界層完成轉捩。從熱流分布圖上看,第1個測點開始沿流向熱流降低,此時邊界層為層流流態;在x≈285 mm位置,邊界層開始轉捩,熱流開始升高,一般認為熱流開始升高的位置即為邊界層轉捩開始位置;隨后在x≈485 mm位置,邊界層轉捩完成為完全湍流流態,熱流開始逐漸降低,一般認為轉捩區之后熱流開始降低的位置即為邊界層轉捩完成位置。圖10為尖錐模型表面邊界層層流、轉捩、湍流3種流態對應熱流傳感器的熱流原始曲線對比。其中圖9對應流向熱流空間分布特性,圖10對應單點熱流時變特性。
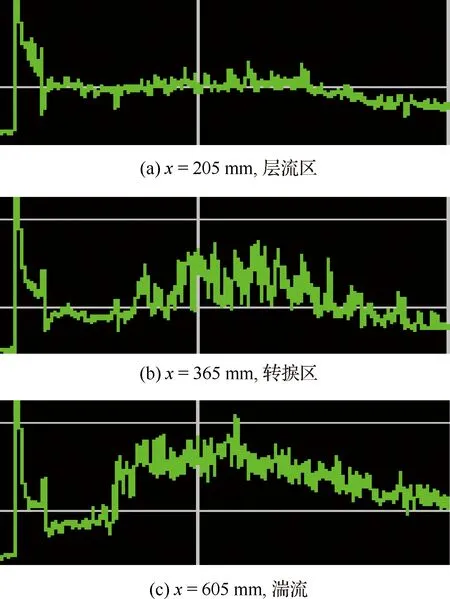
圖10 尖錐模型邊界層不同流態對應測點熱流原始曲線對比Fig.10 Comparison of original heat flux curves of measuring points corresponding to different boundary layer flow state of cone model
5.3 高頻脈動壓力測量結果
PCB高頻脈動壓力結果如圖11所示,此為功率譜密度分析結果,從圖中可以看出,PCB2~PCB5傳感器測量得到明顯的第2模態不穩定波頻率,對應頻率見表1,第2模態不穩定波頻率順流向降低,這是由邊界層厚度增加而導致。從圖9中可以看出,PCB2~PCB5位置邊界層為層流與轉捩狀態,PCB6~PCB8位置邊界層已經完全轉捩成湍流狀態,各種頻率波的能量已經分散,不存在頻率能量集中的峰值。將試驗結果與理論計算進行比較,采用eN方法獲得了不同頻率擾動的N值分布(如圖11所示),由N值分布確定了PCB傳感器所在位置處的主導擾動頻率如表1所示,線性穩定性理論分析獲得的第2模態波頻率與試驗測量結果基本相吻合,除2#PCB傳感器偏差較大,其余傳感器位置理論結果與試驗測量結果偏差在6%以內。
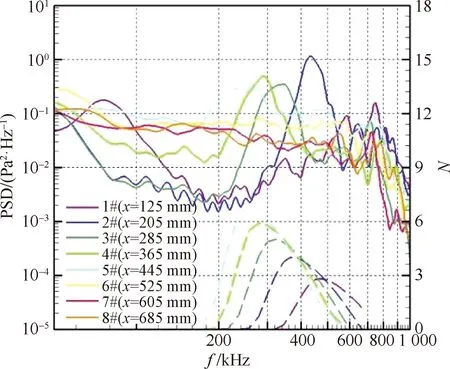
圖11 脈動壓力功率譜密度(實線)與線性穩定性理論分析N值(虛線)對比Fig.11 PSD of pressure fluctuations(solid line)and comparisons with N factor(dotted line)from LST computation
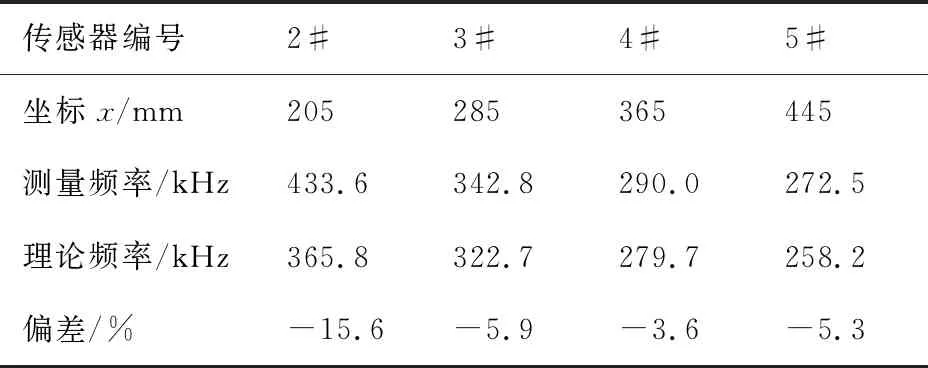
表1 第2模態波PCB傳感器測量頻率與線性穩定性理論頻率對比Table 1 The second mode wave frequency measured by PCB sensors and comparison with LST computation
5.4 高清晰度紋影測量結果
圖7已經給出高清晰度紋影技術測量獲得的高超聲速邊界層轉捩過程中的典型圖像。圖12給出了隨機時刻4張邊界層內第2模態波(繩狀波)原始紋影圖像,每張圖像都有第2模態波存在,其中圖12(a)距離氣流到達13#熱流測點的時間約為3.34 ms。對紋影圖像進行后處理[32],在邊界層內提取一條平行于壁面直線的灰度分布(Bbicubic插值法),以無流場(真空)的紋影圖像作為參考值做平均化處理以消除邊緣虛化的影響,然后對其做PSD分析,自變量為空間頻率fsp,可以分析邊界層內擾動的空間分布特性。圖13對比了4張紋影圖像相應的PSD曲線,結果顯示,前兩張圖像對應的PSD均在fsp=0.214 mm-1附近存在峰值,即對應第2模態波的波長λ=4.67 mm;后兩張圖像對應的PSD均在fsp=0.248 mm-1附近存在峰值,即對應第2模態波的波長λ=4.03 mm。
隨機選取一些紋影圖像進行處理,發現第2模態波波長數值是隨機變化的,按照試驗數據測量經驗,猜測第2模態波波長會圍繞某一特定數值來回振蕩分布。因此選取有效試驗時間范圍內192張連續紋影圖像進行批量處理,獲得波數fsp隨時間的變化曲線如圖14所示。圖15給出了相應波數的頻次直方圖分布,其基本上呈現單峰分布,峰值波數fsp=0.237 mm-1,即波長為λ=4.22 mm。圖14和圖15說明本次試驗測量獲得的第2模態波波長數值,圍繞λ=4.22 mm這一特定波長數值呈現振蕩的單峰分布狀態,這主要是由于風洞來流參數振蕩和測量誤差所導致,但該現象符合試驗測量數據特征。將線性穩定性理論分析方法給出的第2模態波波長與紋影圖像數據處理得到的波長進行比較,如5.1節所述,采用線性穩定性理論方法求得x=365 mm處第2模態波波長為4.40 mm,而紋影圖像得到第2模態波峰值波長為4.22 mm,理論分析結果與試驗結果基本相吻合,僅偏差4.3%。

圖12 第2模態波紋影圖像Fig.12 Schlieren images of the second mode waves
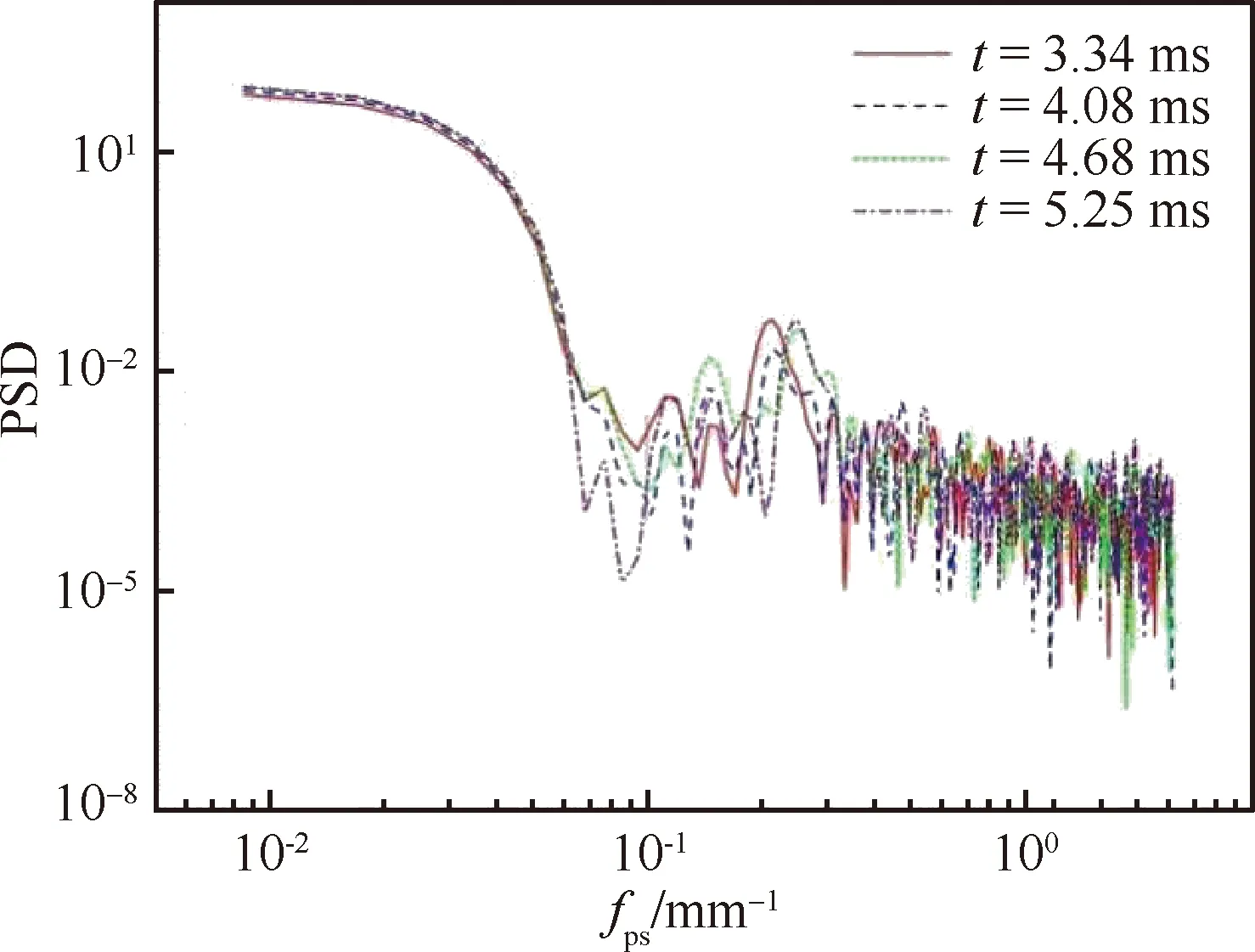
圖13 邊界層流向截線灰度PSD曲線Fig.13 Gray value PSD curves on a streamwise line across boundary layer
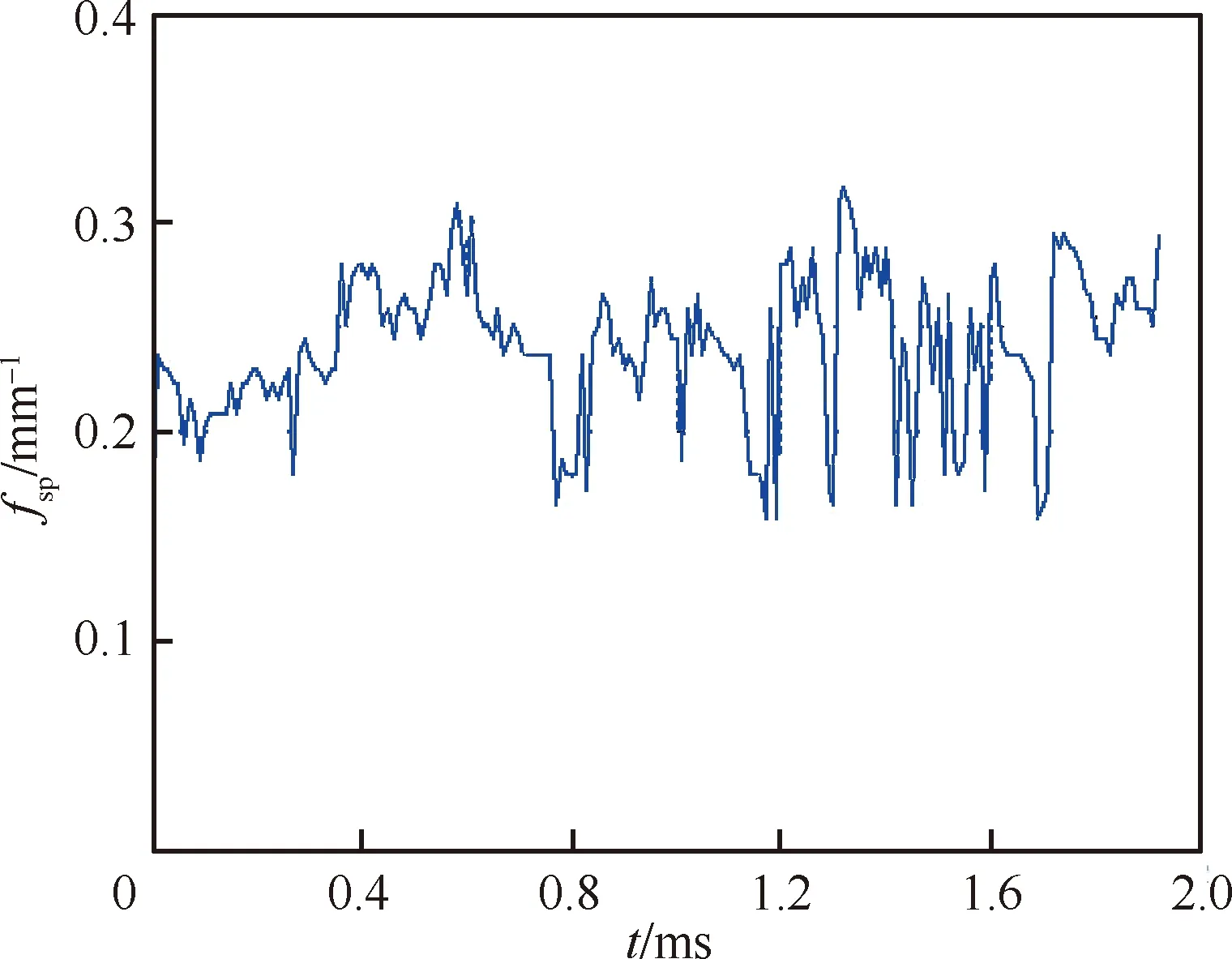
圖14 有效試驗時間內第2模態波特征波數隨時間變化Fig.14 Variation of characteristic wavenumber of the second mode wave during effective test time with time
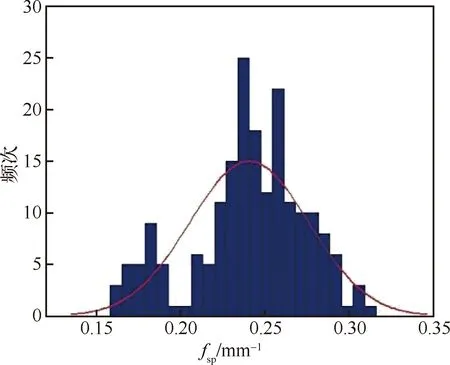
圖15 有效試驗時間內第2模態波特征波數直方圖Fig.15 Histogram of characteristic wavenumber of the second mode wave during effective test time
5.5 不同測量技術試驗結果對比
對于熱流測量結果與高清晰度紋影測量結果的對比,與第2節類似,紋影圖像完整記錄風洞氣流到達模型、模型穩定流場建立、邊界層層流流動、邊界層失穩猝發湍流斑、邊界層轉捩為湍流等過程。圖12是層流狀態下邊界層中第2模態波紋影圖像,當邊界層繼續發展(前提條件是雷諾數足夠高),邊界層開始失穩猝發湍流斑,圖12中后兩張紋影圖像視圖下游出口處已經出現湍流斑。圖16是x=365 mm位置13#熱流傳感器的熱流原始信號,左邊熱流突躍即風洞氣流到達傳感器時刻,第1條黃色標線對應圖12中第1張紋影圖像時刻(3.34 ms),此時邊界層是層流流態,熱流相對較低;第2條綠色標線對應圖17紋影圖像時刻(5.80 ms),此時邊界層為轉捩區,熱流出現強烈脈動情況,這是紋影圖中出現的湍流斑所導致的現象。圖17中紋影視窗上下游各有一個湍流斑,而中間區域存在第2模態波,說明湍流斑的猝發存在一定的偶然性和隨機性。湍流斑不是固定不動的,它會隨著氣流向下游移動,因此當湍流斑掃過熱流傳感器時,傳感器測量得到的熱流曲線上出現尖峰脈沖。需要說明的是,本次試驗熱流傳感器安裝在下緣母線上,紋影圖像記錄的是上緣母線,兩者周向角為180°,雖然尖錐模型迎角為0°,但由于湍流斑猝發的偶然性和隨機性,熱流信號與紋影圖像在時間序列上并不完全對應。
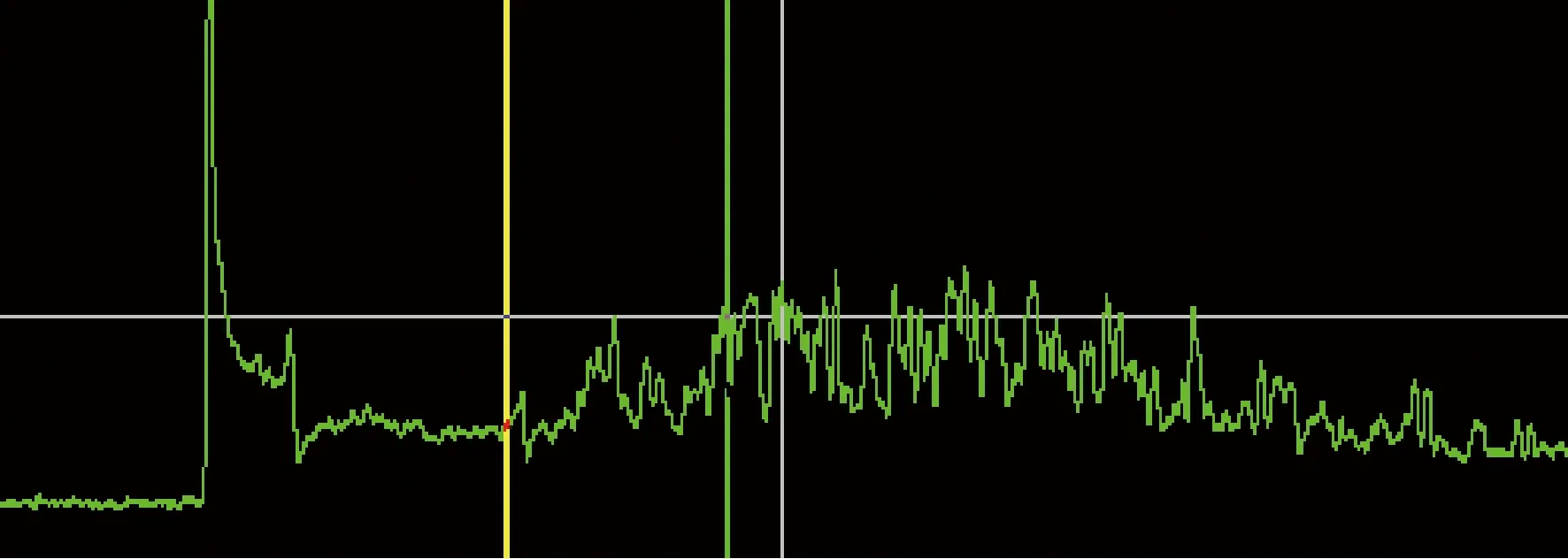
圖16 13#熱流傳感器(x=365 mm)熱流原始信號Fig.16 Heat flux original signal of 13# heat flux sensor (x=365 mm)

圖17 t=5.80 ms紋影圖像Fig.17 Schlieren image at t=5.80 ms
5.3節中已經說明了PCB傳感器測量結果與邊界層流態的關系,這里對處于轉捩區的PCB傳感器測量結果進一步說明。把高頻脈動壓力測量結果與熱流測量結果和高清晰度紋影測量結果進行對比,從圖16、圖17中看出,在湍流斑出現的間歇期存在局部短時層流狀態,其中存在第2模態波,這導致轉捩區的PCB傳感器能夠測量得到第2模態波頻譜特性。
接下來對比高清晰度紋影測量結果與高頻脈動壓力測量結果。選取3.64 ms時刻的紋影圖像,按照上述方法對第2模態波圖像處理得波長即峰值波長為4.22 mm。對t=3.64 ms和3.65 ms連續兩張紋影圖像采用互相關分析方法進行處理,處理方法如下:
(1)
式中:p、q分別為兩張很短的時間間隔內紋影圖像對應點的灰度值;k、l為對應點的位移分量。然后歸一化,
(2)

6 結 論
根據高超聲速邊界層轉捩過程中熱流、壓力、密度等參數變化特點,對激波風洞已有的試驗測量技術進行適應性改造和升級,發展了點熱流、溫敏熱圖、高頻脈動壓力、高清晰度紋影等適用于激波風洞的高超聲速邊界層轉捩測量技術。并針對頭部鈍度0.05 mm的半錐角7°尖錐模型,在中國空氣動力研究與發展中心(FD-14A)馬赫數10、單位雷諾數1.2×107/m的流場條件下開展了邊界層轉捩試驗,采用點熱流、高頻脈動壓力、高清晰度紋影3種轉捩測量技術同時進行測量,獲得了較好的試驗結果。
通過點熱流轉捩測量技術獲得了轉捩開始、完成位置等尖錐邊界層轉捩情況;通過高頻脈動壓力測量技術獲得了尖錐邊界層轉捩頻譜特性,并獲得了第2模態波主導頻率;通過高清晰度紋影技術獲得了尖錐邊界層轉捩過程中出現的第2模態波、湍流斑等結構的清晰紋影圖像,并記錄了相關邊界層結構生成、轉化過程,為分析高超聲速邊界層轉捩特性提供了直觀和動態圖像。
不同測量技術試驗結果對比表明,熱流傳感器記錄的熱流脈動情況與紋影圖像中湍流斑的出現有相關性;熱流測量獲得的邊界層轉捩情況與脈動壓力反映的邊界層流態特性相吻合;采用空間尺度快速傅里葉變換方法對紋影圖像邊界層中灰度值進行分析獲得第2模態波波長,采用互相關方法對紋影圖像中第2模態波移動速度進行分析,通過波長、波速、頻率關系式獲得第2模態波頻率,與相對應位置PCB傳感器測量獲得的第2模態波主導頻率相吻合。另外通過線性穩定性理論分析獲得的第2模態波頻率與PCB傳感器測量的頻率基本相吻合,線性穩定性理論分析獲得的第2模態波波長與紋影圖像中記錄波長相吻合。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39