面向溫室大棚辣椒的幼苗全自動移栽方法研究
2019-09-18 09:13:38李建華牛明雷王俊偉李平安
中國農業信息 2019年3期
關鍵詞:設計
郝 炘,李建華,牛明雷,王俊偉,李平安,李 華
(1. 天津農墾渤海農業集團有限公司,天津301823;2. 天津市寶坻區朝霞街道辦事處,天津301800;3. 農業農村部工程建設服務中心,北京100081;4. 北京市植物保護站,北京100029;5. 湖南省益陽市桃江縣農業局,益陽413499;6. 內蒙古自治區赤峰市寧城縣植保植檢站,赤峰024200)
0 引言
我國已成為世界上最大的蔬菜生產國,蔬菜也是我國的主要農作物之一。中國開展“菜籃子”市場體系以來,我國很多地區已經形成了溫室大棚直接到超市的“菜籃子”市場體系[1]。蔬菜的生產過程屬于勞動密集型產業,人工成本占據了總投入50%以上。
為了提升蔬菜作物效益,目前我國超過60%的蔬菜在育苗階段廣泛采用在育苗棚內培育缽苗的方法,當缽苗的表型特征達到一定閾值時進行移栽[2]。目前的移栽作業有90%以上是通過人工完成的,存在勞動強度集中、生產效率低下等問題,從而影響生產規模與效率,進而制約蔬菜生產的發展。文章研制的溫室大棚缽苗移栽機對提高勞動生產率、保證秧苗栽植質量和減輕農民勞動強度具有重要意義。
目前已有相關學者針對移栽機做了一些探索與研究。常用的缽苗移栽機有鉗夾式、吊籃式、回轉式、撓性圓盤式等4種[2-6]。美國RAPID公司生產的RTW系列移栽機采用鉗夾式,通過片狀夾具對幼苗進行提取,如圖1所示。移栽機可以實現幼苗的抓取、移栽,但是容易使植物受傷,并沒有廣泛使用。
荷蘭學者設計的電控幼苗移栽機基于指針插入式結構,配備了多個相互獨立的機械爪及機械臂,采用單電控方式對每個機械爪進行控制,如圖2所示,其移栽速度達到100株/min,能夠達到人工手動移栽的6~7倍[7]。

圖1 RTW-SOOS2移栽機的片狀夾持器具Fig.1 Sheet-shaped holding device for RTW-SOOS2 transplanter

圖2 電控幼苗移栽機Fig.2 Electronically controlled seedling transplanter
日本的井關蔬菜移栽機采用多桿式移栽,能同時完成打穴、移栽、覆土、鎮壓等各項工作,但是造價太高,而且當栽植速度提高以后,栽植的質量會降低,因此該機器也并沒有得到廣泛推廣使用。意大利法拉利公司設計的Modello-Futura型移栽機,采用模塊集成設計的方法,栽植速度達到3 720株/h,由于必須使用特殊的泡沫缽苗盤,通用性差,而且該移栽機結構過于復雜,再加上采用液壓氣壓驅動,直接導致成本大幅增加,因此用戶接受程度也較低。中國農業大學徐麗明在2000年設計了采用多連桿型的玉米自動移栽機取苗設備[8],但該機構關節粗大、連桿繁多、工作過程復雜,在作業時需要巨大的額外空間,整個機器靈活性受到很大限制。目前全自動化蔬菜移栽機[9]因造價高、栽植質量低等因素,制約了蔬菜移栽機的大規模推廣使用,即使在發達國家推廣效率也保持在較低水平。文章針對辣椒缽苗設計了一種簡便易用的自動化移栽設備[10],克服了成本高、質量低等蔬菜移栽機常見問題,能夠提高蔬菜移栽作業的自動化水平。
1 總體設計
1.1 系統整體框架
該文以農藝需求為基礎,結合國內外現有幼苗移栽機特點[11],對關鍵部位即曲柄搖桿夾取機構進行分析,針對辣椒幼苗設計了一種包含取、投苗兩種功能的自動移栽機。對于辣椒缽苗,溫室大棚移栽時一般采取一壟上種植兩行或一行,所以取、投苗機構針對不同地塊、不同經濟作物應有較良好的適應性。該文采用行走輪設計,整體設計如圖3所示。移栽機核心功能的兩個主要部件分別是回轉夾取部件和移栽部件。夾取部件完成取苗工作,移栽部件實現投苗工作,工作流程如圖4所示。
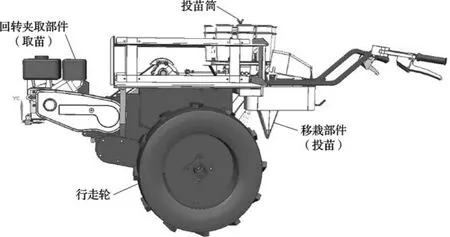
圖3 辣椒移栽機整體結構Fig.3 Overall structure of the pepper transplanting machine

圖4 移栽機工作流程Fig.4 Work flow chart of the transplanter
1.2 取苗系統結構
1.2.1 取苗流程
取苗機構工作原理如圖5所示,其中,A為步進電機輸出軸;AB為曲柄;BC為連桿;CDE為搖桿;E為夾取爪。基于穴盤環境下溫室作物移栽機的設計經驗,該文選擇曲柄搖桿作為取苗過程中的夾苗機構[12]。
曲柄搖桿機構為夾苗機構。在搖桿遠離連桿的一端安裝旋轉夾取機構,由定時程序控制夾取與釋放。步進電機帶動曲柄AB繞軸A轉動,曲柄AB通過連桿BC帶動搖桿做往復運動,兩極限位置分別為取苗位置和投苗位置,進行取苗作業時,頂桿在定時頂出機構的帶動下穿過苗盤將缽苗頂出,由搖桿上夾取爪進行抓取,當搖桿到達另一極限位置時,夾取爪收到指令為下一階段的投苗動作的開啟做準備。

圖5 取苗機構工作原理Fig.5 Work principle of seedling pulling mechanism
1.2.2 取苗部件設計
取苗機構采用曲柄搖桿夾取方式,其中曲柄為主動件,主動件的動力來源是步進電機,步進電機的選擇依據夾取移栽的需求,其各項參數如表1所示。

表1 步進電機相關參數Table 1 Related parameters of the stepper motor
曲柄搖桿機構的作用是從缽苗盤夾取缽苗并送入投苗筒中,為了保證栽植過程順利進行,應該保證缽苗以垂直姿態進入投苗筒。為了實現該要求,在電機的安裝尺寸和機架等其余部件確定的條件下,通過試驗測試確定了曲柄搖桿機構的結構參數,其中擺桿的軸心到電機的軸心的垂直距離e為56.4 mm,水平距離f為213.2 mm,曲柄的長度a為80 mm。而根據f、e、a等參數,能夠確定電機輸出軸與曲柄搖桿夾取機構的鉸接軸承之間的距離,設該距離為j(單位:mm),其與電機輸出軸的鉛垂線之間的夾角,設為β。其公式為:

按照缽苗盤的放置要求,將缽苗盤的傾角設置為30°,從而得到夾取爪在位于夾取位置時,其鉸接軸承與步進電機輸出軸的連線和夾取爪之間的夾角,設為α1(單位:°),設鉸接軸承到擺桿與連桿鉸接點的距離為c(單位:mm),連桿的長度設置為b(單位:mm),得到公式為:


夾取爪從缽苗盤取苗后到達投苗筒位置,將缽苗投下,缽苗從夾苗爪脫落,落入投苗筒中,從而可以進行下一個動作,當夾苗機構位于投苗位置時,夾取爪的鉸接軸承與步進電機輸出軸的連線和夾取爪之間的夾角設為α2(單位:°),得到公式為:

當夾取爪在投苗筒位置完成投苗動作后,夾取爪并不會立刻停下,而是繼續向下擺動,然后到達極限點后回擺,必須保證在夾取爪回擺的過程中,不影響缽苗的下落。通過公式(6)~(8)的幾何關系得出曲柄、連桿、搖桿的設計長度。

缽苗在投苗筒中的下落過程可以近似認為是自由落體運動,40d苗齡的羊角椒缽苗高度h0=140 mm。則有公式為:

式(6)~(9)中,g為重力加速度值,取10 m/s2,h為夾取爪在投苗筒時搖桿與擺桿鉸接點和步進電機輸出軸直線的距離(單位:mm);γ為兩次路過投苗筒時,曲柄轉過的夾角(單位:°);t為兩次經過投苗筒的時間間隔(單位:s);ω為步進電機的輸出軸的轉速(單位:rad/s);h0為40d苗齡的羊角椒缽苗高度。
根據以上過程,計算夾苗機構設計參數如表2所示。此工作參數滿足曲柄搖桿的要求,同時夾取爪有較為良好的夾取特性。由于夾取爪的動力由控制信號給出,必須保證夾取與投苗的位置和時間準確,根據所移栽缽苗種類的不同,夾取爪的夾取投苗的時間間隔不同。以辣椒缽苗為例,一般溫室大棚辣椒的株距為45~50 cm為宜,栽植速度為60株/min,即1 s完成一次取苗、投苗、復位動作,要求電機的轉速為1 r/s。

表2 夾苗機構設計參數Table 2 Clip seedling design parameters
由于不同種類的缽苗在移栽過程中各缽苗的高度與基質的差別,夾苗爪在一定范圍內對不同種類的缽苗都有較強的適應性,所以在夾取爪上安裝復位彈簧,降低施加在缽苗基質上的壓力,依靠控制信號與復位彈簧的共同作用來取苗,降低對缽苗基質的損傷,夾取爪可以根據缽苗基質的變形量自行調節夾取力的大小,保證投苗質量穩定。因此要求:

式(10)中,m0為鉸接軸到彈簧接點的距離,該文中取120 mm;m為鉸接軸到夾苗爪前端之間距離(單位:mm)。
選取復位彈簧,該設計針對的主要為安達羊角椒缽苗,采樣分析得出結果,40d苗齡的安達羊角椒的缽苗平均質量為12.1 g,可得公式為:

彈簧復位系數選取90 N/m,在工作過程中伸長量需大于2 mm,此時滿足:

式(11)~(13)中,θ為夾取板與平面夾角;G為辣椒缽苗收到夾取爪兩夾取板的壓力自身重力N1、N2;G′為沿夾取爪夾取板壓力方向的分力。數據表明,安達羊角椒缽苗在夾取爪夾取閉合的過程中不會脫離夾取爪而脫落。
1.3 投苗系統結構
1.3.1 投苗流程
該文參考西瓜籽粒點播機構進行辣椒等蔬菜缽苗的投苗設計,將辣椒幼苗從該機構的頂端喂入,同時捏動把手的傳動機構,將底端三角錐張開,辣椒缽苗落入土壤中,人工將該機抬起,完成覆土作業。同時,選擇采用“零速投苗”的方式,滿足在投苗階段投苗各機構之間保持相對靜止,通過實驗將機組前進速度設置為0.5 m/s,投苗筒傾角設置為10°。
1.3.2 投苗部件設計
該設計辣椒缽苗移栽機投苗裝置部分需滿足在夾取爪將辣椒缽苗從缽苗盤中夾取后完成栽植動作。投苗裝置設計圖如圖6所示,曲柄搖桿式缽苗夾取機構將缽苗從缽苗盤運送到此投苗裝置的頂部投苗口進行釋放,缽苗落入筒中,同時驅動投苗機構向下運動,底部三角錐張開,將辣椒缽苗栽植進土壤中,完成全部的移栽工作。
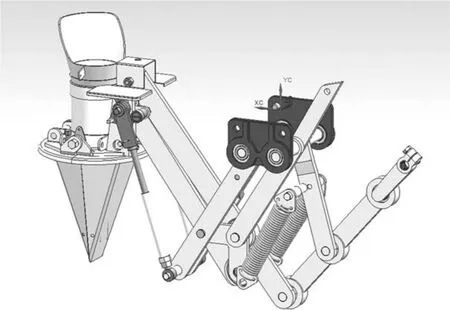
圖6 投苗裝置設計Fig.6 Design diagram of seedling throwing device
2 移栽機測試實驗
在實際應用中,因為基質含水量、夾取爪材料、抓取彈簧勁度系數的變化,會影響辣椒缽苗移栽的成功率[13-15],該文針對該問題設計實驗進行研究。
2.1 取苗夾取爪應用測試
該文選擇不同材質與彈簧勁度系數,測試不同組合條件下的缽苗取苗成功率,夾取過程中缽苗出現破碎或脫落均視為失敗,實驗結果如表3所示。
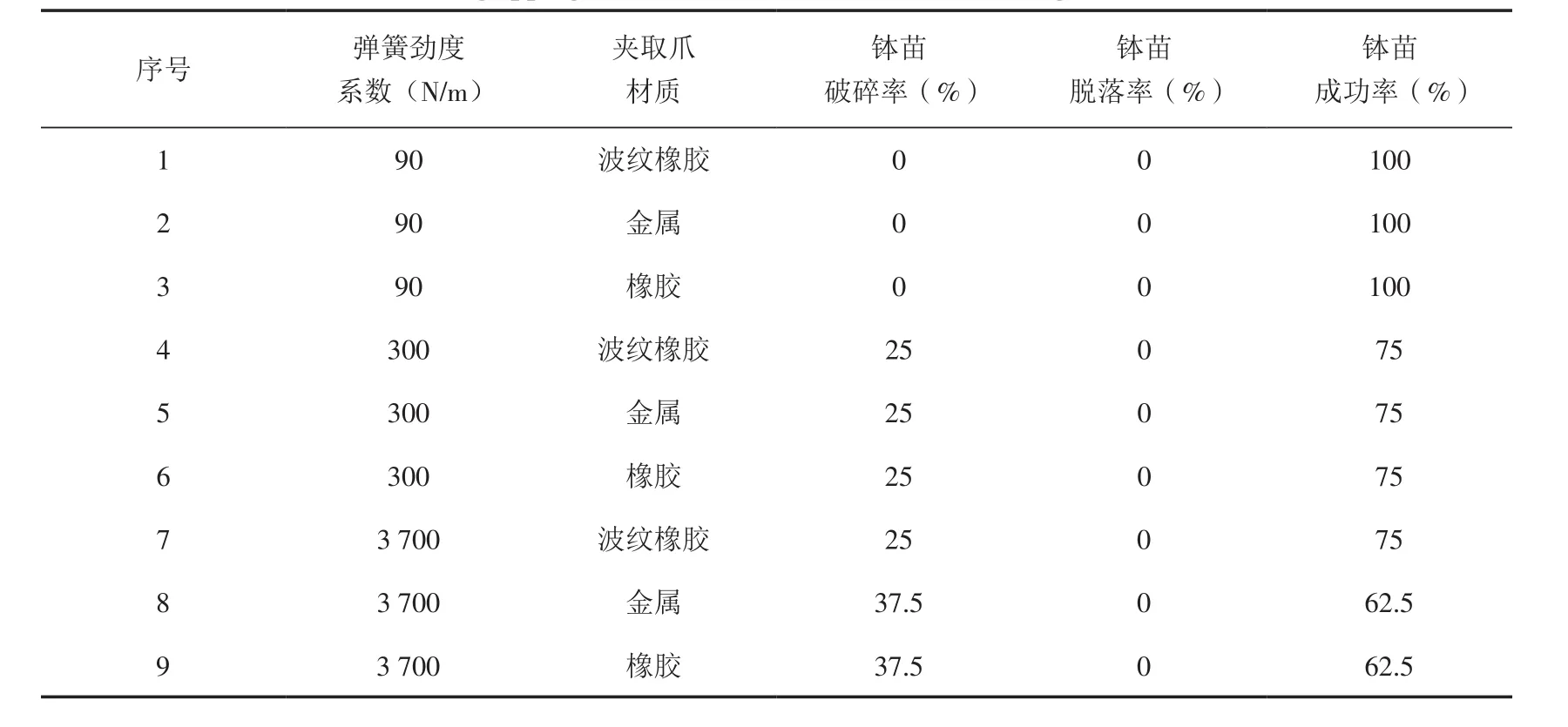
表3 彈簧勁度系數、夾取爪材質的選擇對缽苗夾取成功率的影響Table 3 The influence of the spring stiffness coefficient and the choice of the material of the gripping claw on the success rate of the seedlings
通過對比改變彈簧勁度系數、夾取爪材質后,缽苗破碎率、脫落率、成功率等各因素后發現,當彈簧的勁度系數與夾取爪的材質發生改變后,對缽苗的夾取成功率都有很大的影響。當彈簧的勁度系數為90 N/m時無論夾取爪是波紋橡膠還是金屬,亦或是橡膠,其夾取成功率均為100%,利用SPSS軟件對夾取爪材質的影響顯著性進行方差分析(單因素),最終得到P值為0.56,遠大于顯著性水平(0.05),所以可以得到結論,此3種夾取爪的材質對夾取苗成功率無顯著差異。根據表3發現同彈簧勁度系數下不同夾取爪材質所對應的缽苗夾取成功率不盡相同,這種情況主要是辣椒缽苗長勢各不相同和試驗隨機因素導致,夾取爪的材質對取苗成功率幾乎沒影響。
2.2 前進速度對投苗工作的影響
該文在某溫室內,對辣椒缽苗進行投苗實驗,投苗基質含水量為24%;在使用移栽裝置對辣椒缽苗進行投苗的過程中,對移栽設備設置了不同的行進速度,從0.2 m/s到0.55 m/s不等。隨著機組前進速度的提高,缽苗移栽后的直立度會發生變化,在投苗筒傾角的相對位置不變的情況下,改變機組的前進速度,直立度合格率和株距變異系數關系如圖7所示。
隨著機組前進速度增加,土壤的回流速度增加,使得移栽后的辣椒缽苗得到了及時固定;而當機組的前進速度低于一定值(0.3 m/s)時,直立度受到了很大影響,辣椒缽苗傾倒率很高;當機組的前進速度高于一定值(0.55 m/s)時,缽苗所受牽連速度過大,會導致缽苗前傾現象較大,可能會引發埋苗率大幅增加。實際應用中,行進速度設置為0.4 m/s較為理想。
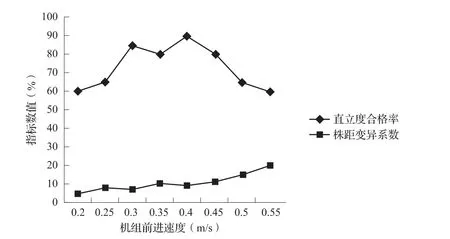
圖7 行進速度對裝置的影響Fig.7 Effect of walking velocity on the device
2.3 投苗筒角度對移栽效果的影響
在投苗過程中,最終投苗位置與實際理想計算會有一定偏差,通過試驗確定當投苗筒的傾角處于8°~18°時,能夠滿足“零速投種”要求,當投苗筒的傾角變小時,缽苗的株距變異系數就會越小,直立度會隨之升高,但是一旦機組速度增加,必須將投苗筒的角度減小從而滿足移栽的農藝要求。該設計采用機組的前進速度為0.4 m/s。當前進速度不變時,改變投苗筒的角度,分析移栽效果的變化,如圖8所示。根據投苗角度和機組前進速度對直立度合格率和株距變異系數的影響,最終確定機組前進速度為0.4 m/s,投苗筒垂直傾角為10°的條件下工作效率更高。
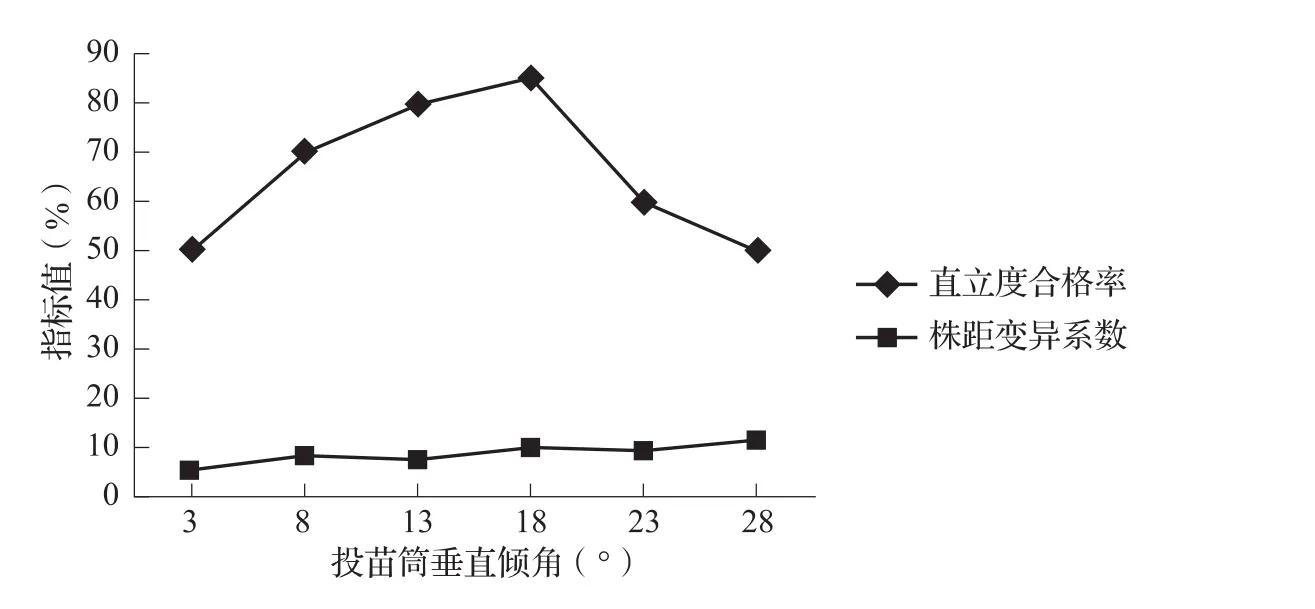
圖8 投苗筒的垂直傾角對株距和直立度的影響Fig.8 Influence of vertical inclination angle of seedling tube on plant distance and verticality
2.4 不同速度下取苗成功率與基質含水率實驗
為研究不同速度與不同含水率基質對取苗成功率的影響,該文在不同速度下,針對不同含水量基質環境進行取苗實驗。實驗基于Q128-1型穴盤展開,穴盤為圓椎體空穴,高度45 mm,下孔直徑常規16.1 mm、上孔直徑長32 mm,規格為16×8,每盤共計128株,局部結構如圖9所示。
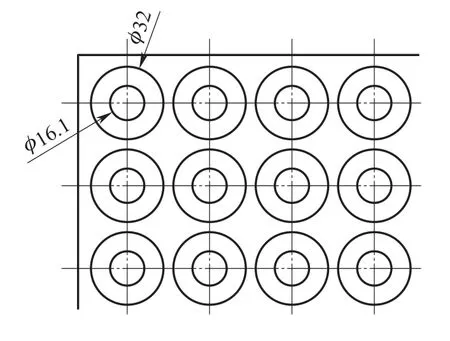
圖9 缽苗盤局部放大Fig.9 Partial enlargement of seedling tray
當基質的含水率升高時,缽苗盤所受外力的限度會發生改變得出基質含水率的高低、取苗速度與取苗成功率的關系,如圖10所示。
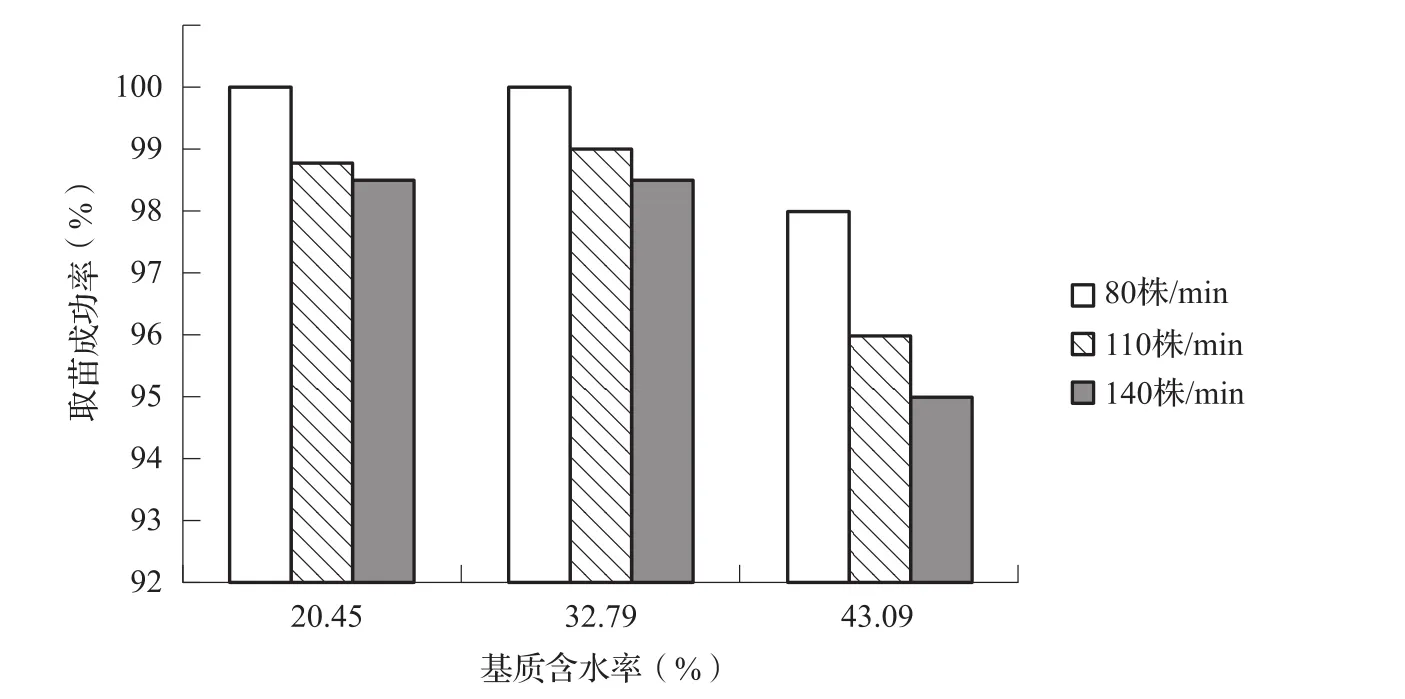
圖10 基質含水率與取苗成功率關系Fig.10 Relationship between substrate moisture content and seedling success rate
根據實驗數據得出,隨著基質含水率增加,取苗成功率逐漸下降。當取苗速度提升,取苗成功率會隨之降低。綜上所述,最佳基質含水率為20.45%,取苗速度為80株/min,在基質含水量高于43.09%時,應降低取苗速度至80株/min及以下,以保證取苗成功率。
3 結論
該文針對溫室大棚辣椒缽苗的移栽需求,設計了一種自動移栽機,移栽機包括取苗機構、頂出裝置、投苗筒、機架等部件。針對自動移栽機進行不同速度、不同含水量基質條件下的投苗取苗測試,得出投苗機最佳運動速度為0.4 m/s,投苗筒的最佳放置角度為10°,基質最適宜含水量為20.45%。最后在不同含水率的基質下通過實驗研究取苗成功率的分布規律,得出移栽機從缽苗盤取苗到栽植機構具有較大廣泛適用性與簡易性的結論,有利于提高溫室內辣椒移栽的工作效率與自動化水平。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04