電動(dòng)汽車用模糊PID 控制的PMSM 控制器 策略研究
2019-09-21 03:44:02楊啟東任佳越秦玉貴
汽車實(shí)用技術(shù) 2019年17期
楊啟東,任佳越,秦玉貴
(長(zhǎng)安大學(xué)汽車學(xué)院,陜西 西安 710064)
前言
在電動(dòng)汽車驅(qū)動(dòng)系統(tǒng)中,永磁同步電機(jī)(PMSM)具有體積小、功率密度較高、調(diào)速范圍較寬、輸出轉(zhuǎn)矩較大等諸多優(yōu)勢(shì),故此得到了廣泛的應(yīng)用及研究,尤其是近年來(lái)電動(dòng)汽車的驅(qū)動(dòng)電機(jī)大多采用永磁同步電機(jī)[1]。在電動(dòng)汽車PMSM 控制系統(tǒng)中并將未其優(yōu)越性極大地發(fā)揮,仍然使用簡(jiǎn)單易行PID 調(diào)節(jié)器是一個(gè)主要因素,雖然PID 控制算法簡(jiǎn)單,易于實(shí)現(xiàn),但主要依靠人們的經(jīng)驗(yàn)獲得,因?yàn)閰?shù)一旦確定后不能實(shí)時(shí)調(diào)整,故此自適應(yīng)性和魯棒性比較差,然而,當(dāng)電動(dòng)汽車行駛在復(fù)雜工況下對(duì)控制系統(tǒng)的動(dòng)態(tài)控制性能以及抗擾動(dòng)能力要求較高[2],因此,簡(jiǎn)單的PID 控制器可能沒(méi)有辦法很好保持系統(tǒng)的優(yōu)良性能。而在設(shè)計(jì)模糊控制器時(shí)候,無(wú)需依靠被控對(duì)象的精確數(shù)學(xué)模型,只需要將人們的長(zhǎng)期控制經(jīng)驗(yàn)歸納成規(guī)則表并存于電動(dòng)汽車的MCU 中實(shí)時(shí)查詢,因此,系統(tǒng)的實(shí)時(shí)性高、魯棒性強(qiáng),尤其適用于非線性系統(tǒng)的控制,本文提出將傳統(tǒng)PID 控制和模糊控制的合二為一,設(shè)計(jì)在了一種適用于PMSM的模糊PID控制器以取代傳統(tǒng)的PID 控制器,通過(guò)仿真實(shí)驗(yàn)的結(jié)果,不難證明所設(shè)計(jì)的控制策略可以很好地完成PID 參數(shù)的自整定工作,達(dá)到了提高動(dòng)態(tài)性能與魯棒性的要求[3]。
1 永磁同步電機(jī)調(diào)速系統(tǒng)基礎(chǔ)理論
1.1 永磁同步電機(jī)矢量控制的數(shù)學(xué)模型
交流永磁同步電機(jī)調(diào)速系統(tǒng)采用矢量控制方案,其基本思想是將普通的三相交流電動(dòng)機(jī)上設(shè)法模擬直流電動(dòng)機(jī)轉(zhuǎn)矩控制的規(guī)律,在磁場(chǎng)定向坐標(biāo)上,將電流矢量分解成產(chǎn)生磁通的勵(lì)磁電流分量和產(chǎn)生轉(zhuǎn)矩的轉(zhuǎn)矩電流分量,并使兩分量相互垂直,彼此獨(dú)立,然后分別進(jìn)行調(diào)節(jié),這樣將其與直流電動(dòng)機(jī)從原理和特性上就可以等效了。因此矢量控制的關(guān)鍵是對(duì)電流矢量的幅值和空間位置的控制。id=0 控制在矢量控制中應(yīng)用最為普遍,本文采用矢量控制中id=0 的控制方法可以獲得很寬的調(diào)速范圍,轉(zhuǎn)矩定性好,控制系統(tǒng)簡(jiǎn)單。經(jīng)過(guò)坐標(biāo)變化,PWSM 在d、q 坐標(biāo)下的轉(zhuǎn)矩方程為[7]-[8]:

式(1)中,pn為轉(zhuǎn)子磁極對(duì)數(shù),ψf為轉(zhuǎn)子磁鏈,iq、id為定子電流矢量is在d 和q 軸的分量,Ld、Lq是d 和q 軸上電感。
表面式永磁同步電機(jī),采用id=0 的控制方法,Ld=Lq,is與ψf在空間上正交,可以獲得最大轉(zhuǎn)矩。這時(shí)is=jiq,式(1)可以改寫(xiě)為式(2):

雖然轉(zhuǎn)子以電角度ωr旋轉(zhuǎn),但是在dq 軸系內(nèi)is與ψf卻始終相對(duì)靜止,從轉(zhuǎn)矩生成的角度,可將面裝式PMSM 等效為他勵(lì)直流電動(dòng)機(jī)。
1.2 PMSM 矢量控制調(diào)速系統(tǒng)工作原理
本文PMSM 調(diào)速系統(tǒng)中具有轉(zhuǎn)速、電流雙閉環(huán)的控制結(jié)構(gòu),速度外環(huán)采用模糊PID 控制器,電流環(huán)調(diào)節(jié)器采用傳統(tǒng)的PI 控制算法。圖1 為永磁同步電機(jī)的矢量控制結(jié)構(gòu)框圖。所謂模糊PID 控制是在原有的PID 控制的基礎(chǔ)上,需要計(jì)算當(dāng)前的轉(zhuǎn)速誤差e 和誤差變化率ec,利用所設(shè)定的模糊規(guī)則進(jìn)行模糊邏輯推理,通過(guò)查詢模糊規(guī)則表對(duì)PID 轉(zhuǎn)速調(diào)節(jié)器的參數(shù)進(jìn)行調(diào)整,使其達(dá)到快速性和穩(wěn)定性的目的。
圖1 中,永磁同步電機(jī)由三相逆變器供電,通過(guò)光電編碼器檢測(cè)轉(zhuǎn)子轉(zhuǎn)速ωr和空間相位θr。由速度調(diào)節(jié)器和電流調(diào)節(jié)器計(jì)算出定子電壓轉(zhuǎn)矩分量Uq和Ud。之后經(jīng)過(guò)坐標(biāo)變換,通過(guò)SVPWM 調(diào)制器得到三相調(diào)節(jié)電壓信號(hào),傳遞給逆變器,最終控制電機(jī)驅(qū)動(dòng)。
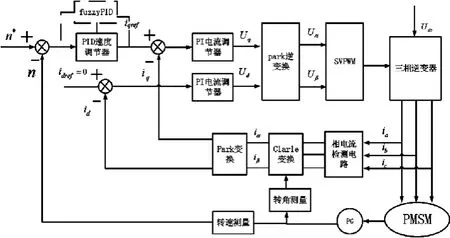
圖1 為永磁同步電機(jī)的矢量控制結(jié)構(gòu)框圖
2 模糊PID 控制器的設(shè)計(jì)
2.1 模糊PID 控制器的基本原理
模糊PID 控制器是將PID 控制器與模糊控制的思想結(jié)合,模糊控制結(jié)構(gòu)如圖2 所示。模糊PID 控制器在運(yùn)行過(guò)程中不斷檢測(cè)誤差e 和誤差變化率ec,并將其模糊化,然后依據(jù)模糊規(guī)則進(jìn)行推理,經(jīng)過(guò)清晰化后再輸出3 個(gè)參數(shù)△Kp、△Ki和△Kd給PID 控制器,并依據(jù)公式(3)實(shí)現(xiàn)對(duì)PID 控制器3 個(gè)參數(shù)的自整定,從而使被控對(duì)象的動(dòng)態(tài)性能顯著提高[4-5]。

圖2 模糊控制結(jié)構(gòu)

式(3)中,Kp0,Ki0和Kd0分別是Kp,Ki和Kd的初始值,△Kp、△Ki和△Kd分別是Kp,Ki和Kd的變化量。
2.2 模糊規(guī)則庫(kù)
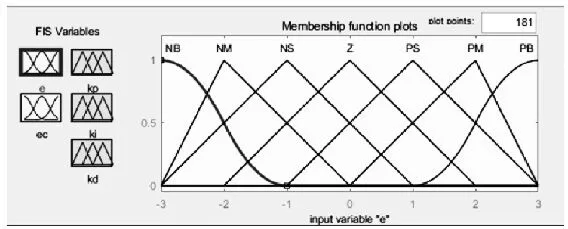
圖3 隸屬度函數(shù)
模糊化是模糊控制任務(wù)是需要輸人值、輸出值從精確值轉(zhuǎn)換為模糊值,將語(yǔ)言變量e、ec,Kp,Ki和Kd量化到有限整數(shù)的離散論域,例如{-3,-2,-1,0,1,2,3},并取對(duì)應(yīng)的語(yǔ)言值為{NB,NM,NS,ZO,PS,PM,PB},即負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大;定義輸人和輸出變量的隸屬度函數(shù),本文為了提高靈敏性,統(tǒng)一選用三角型隸屬度函數(shù)(如圖3 所示)。
針對(duì)于模糊PID 控制器的模糊規(guī)則表如下:

表1 △kp 的規(guī)則表
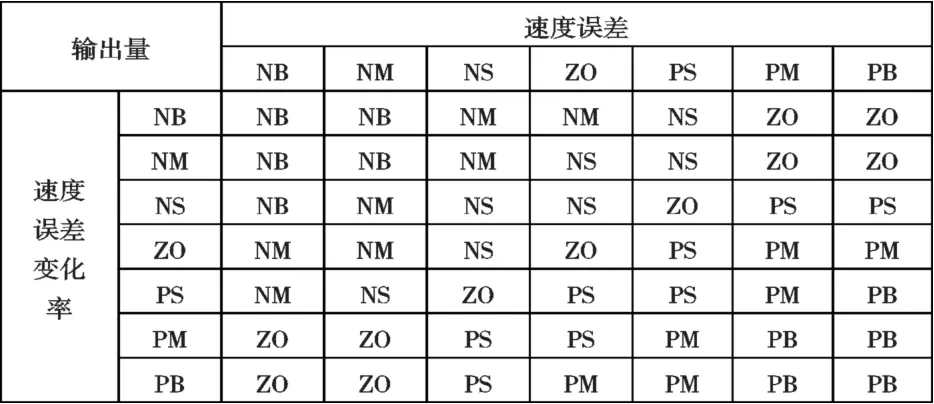
表2 △ki 的規(guī)則表

表3 △kd 的規(guī)則表
上述規(guī)則表中任意一條規(guī)則都可以表示成Ri;IF(e is Ai) and (ec is Bi) THEN u is Ci 的形式,則整個(gè)規(guī)律庫(kù)可以表示為:
R1:IF(e is NB) and (ec is NB) THEN (△kp is PB) and (△ki is NB) and (△kd is PS).
……
R49:IF(e is PB) and (ec is NB) THEN (△kp is NB) and (△ki is NB) and (△kd is PB).
3 仿真與結(jié)果
3.1 仿真模型搭建
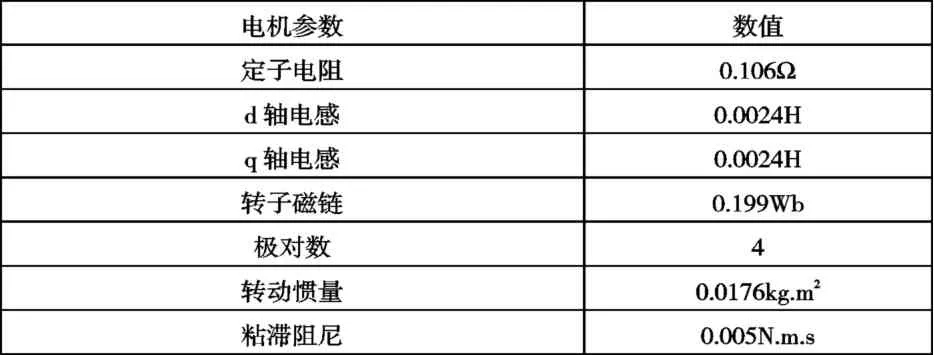
表4 仿真用表面式永磁同步電機(jī)參數(shù)
驗(yàn)證控制策略的正確性,PMSM 調(diào)速系統(tǒng)的MATLAB/ Simulink 模型,比較模糊PID 控制和傳統(tǒng)PID 控制兩種控制策略的仿真效果,系統(tǒng)直流母線電壓為311V,表面式永磁同步電機(jī)的相關(guān)仿真參數(shù)如表4 所示。
初始設(shè)置電動(dòng)機(jī)空載啟動(dòng)下參考轉(zhuǎn)速給定值為400r/ min,在0.04s 時(shí),給電機(jī)突加100Nm 負(fù)載,兩個(gè)控制策略下轉(zhuǎn)速控制圖如圖4 所示。
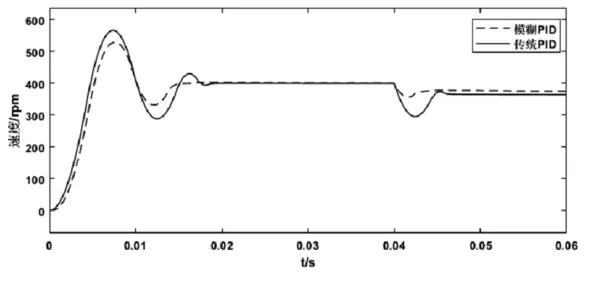
圖4 仿真結(jié)果對(duì)比
在動(dòng)態(tài)性能來(lái)看,在空載下給定參考轉(zhuǎn)速400 r/min,采用模糊PID 控制的超調(diào)量要小于傳統(tǒng)的PID 控制,且最終的調(diào)節(jié)時(shí)間從圖也可知要少于傳統(tǒng)控制。針對(duì)于穩(wěn)態(tài)下抗負(fù)載的擾動(dòng)能力的比較,在100Nm 負(fù)載下,模糊PID 控制轉(zhuǎn)速變化的幅度以及恢復(fù)時(shí)間都要小于傳統(tǒng)PID 控制。故此,采用模糊PID 控制永磁同步電機(jī)系統(tǒng)的動(dòng)、靜態(tài)性能和抗干擾能力都優(yōu)于傳統(tǒng)的PID 控制,波動(dòng)小,更快趨于穩(wěn)定,具有較強(qiáng)的魯棒性。
4 結(jié)論
將模糊控制引入到永磁同步電機(jī)系統(tǒng)的控制中,將模糊控制的思想與PID 控制所結(jié)合。仿真實(shí)驗(yàn)結(jié)果表明:采用模糊控制器的系統(tǒng)的動(dòng)性能和抗干擾能力均優(yōu)于傳統(tǒng)的PID 控制,且對(duì)于系統(tǒng)的參數(shù)變化具有較強(qiáng)的魯棒性。所設(shè)計(jì)的基于模糊控制PID 策略下的電機(jī)運(yùn)行具有良好的性能,可以有效提升電動(dòng)汽車的動(dòng)力性能,使PMSM 在電動(dòng)汽車的驅(qū)動(dòng)領(lǐng)域上更大發(fā)揮其優(yōu)越性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
