基于小尺度的無燈控交叉口智能車輛駕駛行為決策模型*
2019-09-23 07:06:10杜玉龍龍偉李炎炎俞曉紅陳金戈
汽車技術 2019年9期
杜玉龍 龍偉 李炎炎 俞曉紅 陳金戈
(四川大學,成都 610065)
主題詞:交叉口 重復博弈 駕駛策略 激進度 時間尺度
1 前言
無交通燈交叉路口自動駕駛車輛與傳統車輛的交匯問題是現階段智能車輛研究領域的重要研究內容。Fortelle[1]在完全車聯網環境下,獲取即將進入交叉口車輛的速度、位置等信息,規劃出一條可避開沖突的行駛路徑。Lee 等[2]利用車路協同技術,提出了一種單車道無信號燈控制的交叉口單個車輛行駛軌跡沖突消除的控制算法。Perronnet[3]和Ahmane等[4]同樣基于車路協同環境,提出了一種規定車輛通過順序的交叉口排隊序列協議。但是,大部分公共交通環境并不具備完善的車聯網設施,故以上方案不能解決所有交叉口交匯問題。Lobjois[5]對影響駕駛員駕駛行為決策的年齡及車流密度因素進行分析,結合可穿插間隙理論,提出交叉口安全通行建議,但忽略了車輛速度、加速度對駕駛員的影響。劉小明等[6]用博弈論分析了不同類型的駕駛員在無燈控交叉口的駕駛行為決策和相應的納什(Nash)均衡,但并未給出具體駕駛策略。宋威龍等[7]基于模糊邏輯建立了駕駛員激進度劃分模型,但未能解決加、減速度具體數值的選取問題。
本文基于未安裝通信設備的無燈控交叉口路段,對自動駕駛車輛與傳統車輛的交匯協同問題進行研究。首先對兩車博弈收益情況進行分析,明確交叉口通行博弈只存在混合策略的Nash 均衡,從而引入重復博弈理論對交匯問題進行求解。博弈過程中,通過建立駕駛員激進度模型幫助自動駕駛車輛判斷傳統車輛駕駛員的駕駛行為,以給出正確的應對策略并建立最佳減速度選取模型,使自動駕駛車輛在減速避讓后仍能以較高的車速通過交叉口。
2 車輛間博弈收益情況分析
將機動車之間的博弈視為對稱博弈,博弈過程中存在冒進和禮讓2 種駕駛行為策略。當一方禮讓而另一方冒進時,禮讓一方的收益記為-b(b>0),冒進一方收益為b;當雙方均禮讓時,雙方的收益均為-b;當雙方均冒進時,則出現兩車相撞的交通事故,此時雙方收益均為-B(0<b<<B)[8]。當兩車同時禮讓或同時冒進時,交叉口系統的整體收益分別為-2b和-2B,且雙方車輛各自收益均小于零,造成整個交通網絡收益下降;當一方禮讓而另一方冒進時,存在純策略的Nash均衡,但此均衡不穩定,因雙方存在直接利益沖突,一方得到意味著另一方必定失去,不能作為博弈模型穩定解[9]。根據納什均衡原理,此模型一定包含一個混合策略Nash均衡,所以需要制定相應的策略集合,以達到雙方利益最大化。
3 重復博弈過程分析與更小時間尺度的劃分
實際駕駛過程中,為安全快速地通過交叉口,傳統車輛雙方駕駛員會通過觀察對方行駛狀態不斷地調整車速。因此,本文將交叉口交匯問題視為動態重復博弈過程,在每個博弈階段,博弈雙方均能觀察對方的行為策略并同時采取行動。
本文以圖1所示的交叉口通行情況為研究對象,假設交叉口視野不受阻。自動駕駛車輛C1自南向北(S→N)直線行駛,傳統車輛C2自西向東(W→E)直線行駛,O點為潛在沖突點。

圖1 無燈控交叉口車輛交匯示意圖
當C1檢測到左前方來車C2時記為時刻T0,此時C2的駕駛員也觀察到C1,博弈開始。其中任意一輛車通過沖突點O時判定博弈過程結束,記為時刻Tend。將T0到Tend博弈過程劃分為N個時間步尺度Δt,在每個時間步[ti-1,ti]內,車輛C1會檢測車輛C2在ti時刻的加速度、速度、與沖突點O的距離,同樣,車輛C2的駕駛員也會觀察此時車輛C1的加速度、速度、與沖突點O的距離。
整個博弈過程中雙方均受到安全因素和速度因素約束,即不能發生碰撞或超過路段的最大限制車速vmax[10]。兩車是否存在通行干擾以車輛通過交叉口的時間差與碰撞時間(Time To Collision,TTC)判定,當時間差大于規避碰撞時間Tttc時則無干擾通過,否則不能安全通過,根據文獻[11],Tttc≥1 s。
C1、C2在ti時刻以當前行駛狀態到達沖突點需要的時間分別為,與O的距離分別為:
到達沖突點的時間差ΔTi為:

C2車輛駕駛員對C1的加速度、速度等信息通過經驗估計獲得,而C1通過自身目標跟蹤單元計算獲取車輛C2的行駛狀態信息,檢測一個時間步尺度內車輛C2的移動距離di,可得此時間步結束時C2的加速度和速度:
若ti時刻ΔTi>Tttc,則不會出現通行干擾,雙方車輛可保持當前的駕駛狀態繼續行駛;否則雙方車輛需調整各自的駕駛策略。
4 駕駛員類型劃分模型
實際駕駛過程中,駕駛員常通過車輛速度和加速度信息判斷對方駕駛員的激進程度,在文獻[8]基于模糊邏輯構建速度、加速度、駕駛激進程度隸屬度函數的基礎上,本文通過收集多位駕駛員的駕駛經驗,細化汽車速度和加速度對駕駛員激進程度判別的影響,使用曲線擬合的方法獲取速度和加速度與激進程度的對應關系,如圖2所示。
利用最優值匹配法結合Origin軟件擬合曲線,得到速度、加速度與激進程度的函數關系式分別為:
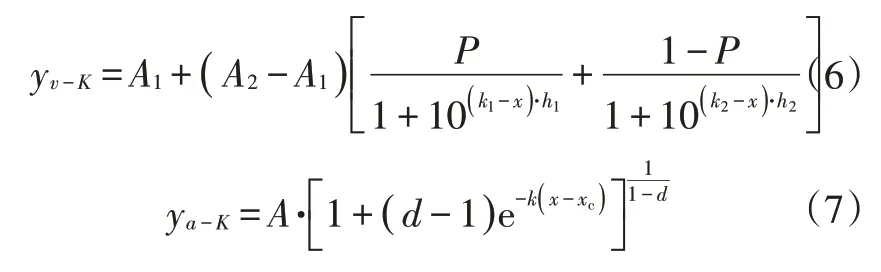
式 中,A1=-0.003 71 ;A2=1.016 13 ;k1=43.197 70 ;k2=41.145 98;h1=0.039 61;h2=0.662 93;P=0.886 44;A=1.014 50;xc=1.870 03;d=1.888 24;k=1.059 86。
通常認為速度和加速度對駕駛員的判斷同等重要,故對式(6)和式(7)賦予相同的加權值,加權后的MAP圖如圖3所示,激進程度綜合估計表達式為:

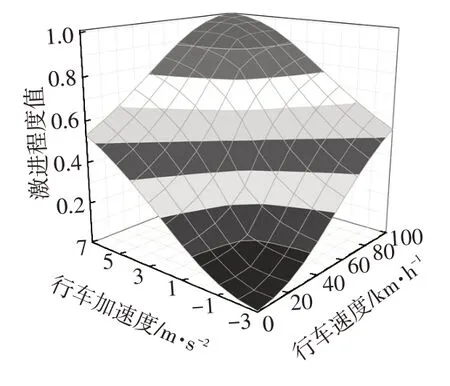
圖3 速度-加速度-激進度MAP圖

將±0.03 作為激進程度差值的臨界值[7],在第ti時刻:ΔK≤-0.03時認為車輛C1相對于車輛C2為相對保守型;ΔK≥0.03 時C1為相對激進型;-0.03<ΔK<0.03 時,則應調整激進程度以達到相對保守或相對激進,當C1以當前行駛狀態先到達沖突點則調整為相對激進狀態,反之則調整為相對保守狀態。
5 駕駛策略選擇
5.1 駕駛行為決策
利用激進程度差值判斷C1相對于C2的激進狀態,若相對保守則根據表1選擇駕駛策略,若相對激進則根據表2選擇駕駛策略[7]。
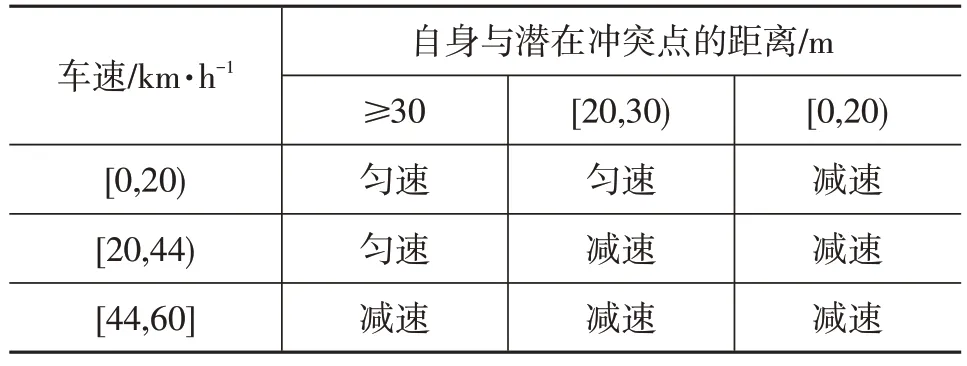
表1 智能車輛相對保守時的行為決策
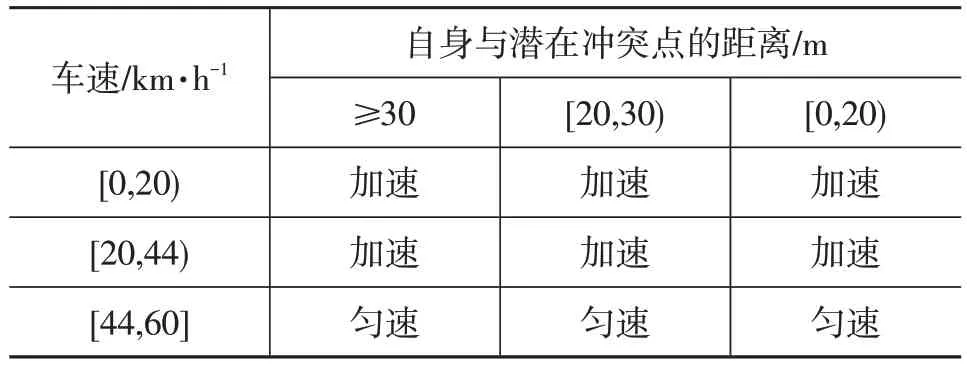
表2 智能車輛相對激進時的行為決策
駕駛員類型分為果斷型和猶豫型:果斷型駕駛員在博弈初期階段即可確定駕駛策略,自動駕駛車輛則可制定準確的行駛方案;猶豫型駕駛員對于加速或者減速猶豫不定,為確保行車安全,自動駕駛車輛應主動避讓。
5.2 減速度選擇模型
加、減速度的選取應該考慮乘坐安全性、舒適性和高效性。車輛縱向加速度直接影響其乘坐舒適性,當加速度超過1.5 m/s2,減速度超過2.5 m/s2時乘員將會感到不適[12]。設加速時的加速度為定值1.5 m/s2。C1選擇減速避讓時,若以停車怠速方式等待對方車輛通過則會增加污染物排放和起步時間,降低行車效率,若以最小減速度持續減速至對方車輛通過,則C1避讓后將以最大速度通過路口。最佳減速度的選取方式為:

式中,a為最佳減速度;(+1)是指依據TTC 規范,自動駕駛車輛應在傳統車輛通過交叉口1 s后通過沖突點。
當C1選擇減速策略時,減速度參考圖4 所示MAP圖選取。

圖4 最佳減速度MAP圖
6 仿真驗證
利用CarSim 與MATLAB/Simulink 進行聯合仿真,仿真環境見圖1。自動駕駛車輛為相對激進型的仿真結果如圖5 所示,C1以50 km/h 的速度在距離沖突點60 m 時檢測到左側方的傳統車輛C2,此時距離沖突點65 m 的C2的駕駛員也觀測到車輛C1,博弈開始。在時速60 km/h 時,人的視野區間為0.3~0.6 s[13],兼顧智能車輛系統穩定性和行駛安全性,取0.4 s 為1 個時間步,第1 個時間步C1監測C2的車速和加速度以判斷對方駕駛員的激進程度。通過查詢激進程度MAP 圖得C1、C2的激進程度分別為0.402 92 和0.372 77,所以C1相對于C2更為激進,查詢相對激進行為決策表選取勻速策略。整個博弈過程車輛C2駕駛員選擇減速避讓,確認車輛C1能安全通過后加速通過。
自動駕駛車輛為相對保守型的仿真結果如圖6 所示,C2以54 km/h相對C1更為激進地行駛,故C1通過查詢表1采取避讓行駛策略,通過查詢圖4選取最佳減速度a=0.529 m/s2。在第3 個時間步中,C2開始加速行駛,每次博弈結束時,C1計算兩車以當前車速勻速行駛是否會產生干擾,若不會則停止減速,選擇勻速行駛。第5 次博弈結束時,兩車以當前車速勻速行駛并不會產生干擾,故C1從第6個時間步開始勻速行駛以減少速度損失和時間消耗。
圖7 所示為猶豫型駕駛員在博弈過程中各項指標的變化情況。由圖7a 可見:開始時刻C1勻速行駛并觀察到C2加速行駛,C1開始減速避讓;第2 次博弈結束后C2也開始減速,至第5 次博弈開始時,C1根據激進程度差值結果查詢表2 后選擇勻速行駛,C2繼續減速行駛;第6 次博弈初始,C1相對于C2更激進,所以C1開始加速,而當C1開始加速時,C2也開始加速,C1調整速度值次數超過5 次后判斷對方車輛駕駛員為猶豫型駕駛員,為安全起見選擇停車避讓。圖7a 虛線部分為C1選擇停車避讓決策后直到完全停車需要的時間。由圖7b 可知,C2在第13 個時間步后率先通過交叉口,此時智能車輛可選擇新的策略通過交叉口而不再持續減速至停車。
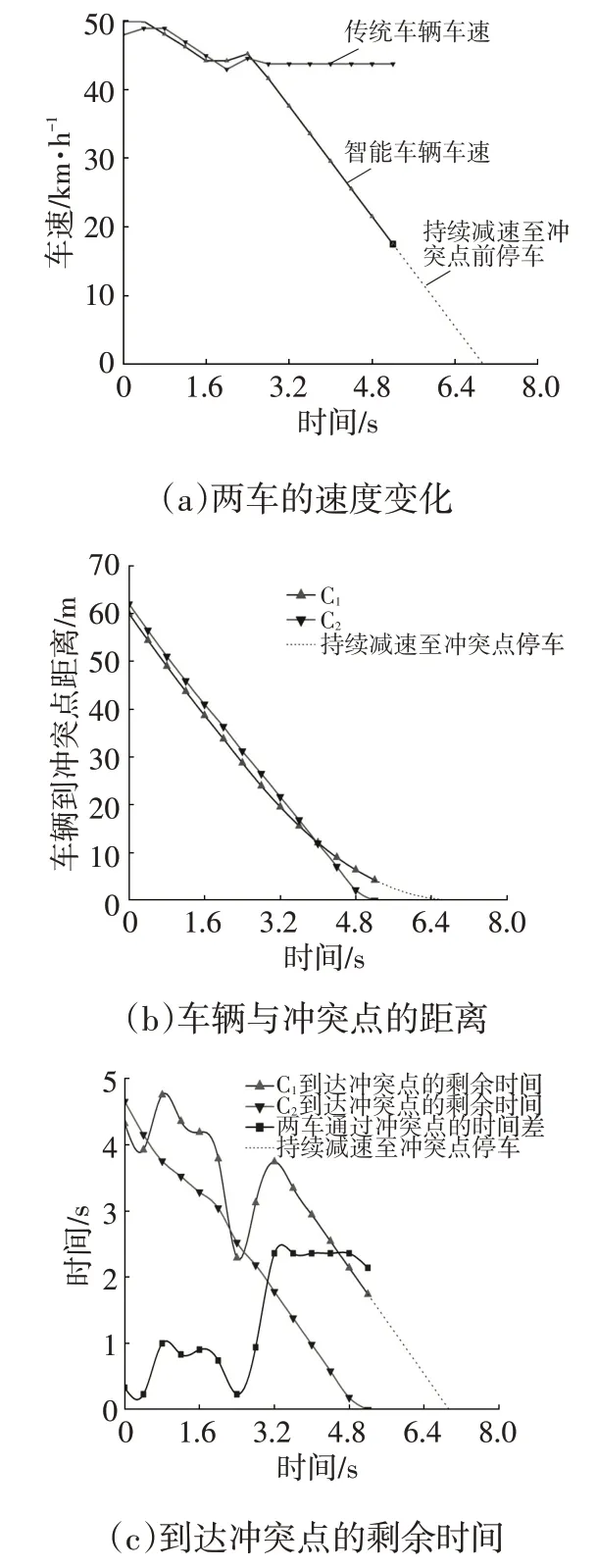
圖7 傳統車輛駕駛員為猶豫型時的仿真結果
7 結束語
本文通過分析交叉口機動車博弈收益情況,在明確混合策略Nash 均衡存在解的前提下,用重復博弈理論對整個交匯過程進行了分析。博弈過程中建立駕駛員激進程度模型,對不同駕駛行為進行預判,幫助自動駕駛車輛制定準確的駕駛策略。為改善舒適性、提高通過效率、減少污染物排放,提出最佳減速度選取模型使自動駕駛車輛在減速避讓后能以較快的速度通過交叉口。經仿真驗證,本文提出的駕駛員激進度模型和最佳減速度選取模型能使自動駕駛車輛在無燈控交叉口與傳統車輛交匯時安全高效地通過路口。但本文的討論是在路口無行人和非機動車干擾的前提下進行的,一定程度上簡化了實際情況,速度和加速度綜合影響加權值的選取需對大量不同類型駕駛員采樣評價才更為準確,所以仍需對激進程度模型進行進一步優化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
